Primer examen parcial (18/12/04)
Anuncio
")
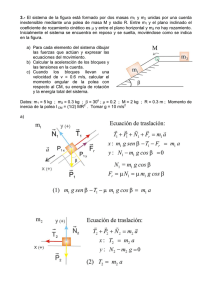
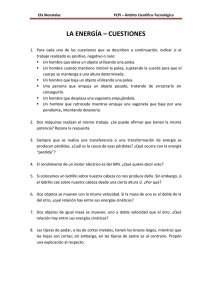
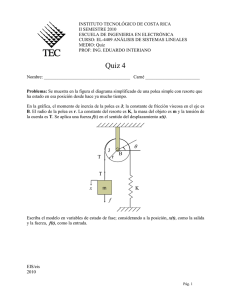
Primer examen parcial (18/12/04) Física-Fundamentos Físicos de la Ingeniería Departamento de Física Aplicada Facultad de Ciencias Químicas. UCLM TEORÍA (5 puntos) 1) Aceleración de Coriolis: expresión (no deducir) (0.25), sentido físico (0.5) y ejemplo (0.5) 2) Diagramas de energía potencial en una dimensión a. ¿Con qué tipo de interacciones se pueden emplear? (0.5) b. Para un valor dado de la energía total, ¿cómo saber el rango de posiciones accesibles a la partícula? (0.5) c. ¿Qué es un punto de equilibrio y cómo se determina? (0.5) 3) Explicar razonadamente qué cantidades se mantienen constantes en los distintos tipos de choques (1.5) 4) Teorema de Steiner (expresión 0.25; demostración 0.5) PROBLEMAS (5 puntos) 1) Se tiene un plano inclinado un ángulo α respecto de la horizontal sobre el que se sitúa una masa M y donde existe cierto rozamiento (coeficiente μ). Posteriormente, se aplica sobre M una fuerza F constante y siempre horizontal. a. Determinar el valor de F para que la masa ascendiera con velocidad uniforme por el plano inclinado. b. En estas condiciones, calcular el trabajo realizado por la fuerza F al desplazar la masa M una distancia L a lo largo del plano inclinado. r1 M r2 L I F α 2) De la polea ilustrada en la figura, que tiene momento de inercia I, cuelgan a distinto radio dos cuerpos. El sistema se encuentra en equilibrio con ciertos valores conocidos de m2, r1 y r2. a. Determinar el valor de m1 m1 m2 m2 2 Se lanza entonces verticalmente hacia arriba una bola de plastilina de masa m2/2 contra la masa m2, de modo que tras el impacto el conjunto formado por ambas masas, ahora unidas tras el choque, comienza a ascender con velocidad v0. b. Determinar el valor de la velocidad de la masa de plastilina inmediatamente antes del choque. c. Determinar en esta nueva situación de no-equilibrio la aceleración angular del sistema, y el tiempo que tardarán las masas en detenerse. 1) Todas las fuerzas que actúan sobre la partícula se pueden descomponer en los ejes propuestos en la siguiente figura (ejes paralelo y perpendicular al plano inclinado): Eje y N Eje x L M α F FRoz α mg Las ecuaciones de la dinámica de translación (ascenso) de la partícula a lo largo del plano inclinado son las siguientes. Ma x = F cos α − Mgsenα − FRoz = F cos α − Mgsenα − μN Ma y = N − Fsenα − Mg cos α Dado que la masa M debe ascender con movimiento uniforme, ax=0 y como además siempre existe equilibrio en el eje y, tenemos que ay=0. Combinando ambas ecuaciones para eliminar la fuerza normal N, llegamos al resultado pedido: Mg (senα + μ cos α ) F= (1.5 puntos) (cos α − μsenα ) El trabajo realizado por la fuerza F sobre la masa M a lo largo de una distancia L se puede calcular del siguiente modo: r r → r r r r r r W = ∫ F ·dr = ∫ F dr cos α = F cos α ∫ dr = F cos α (r − r0 ) = F L cos α r0 r0 r0 (1 punto) 2) Las fuerzas que actúan sobre cada componente del sistema (polea y pesas) son las que se indican en el dibujo mostrado más abajo. a) En el equilibrio, se debe cumplir que: r r ∑ F = 0 ∑ M = 0 m1 g − T1 = 0 T2 − m2 g = 0 T1r1 − T2 R2 = 0 i i (1 punto) r1 Combinando las tres ecuaciones llegamos a : m2 = m1 r2 b) La bola de plastilina choca contra la masa m2 y, entonces, el sistema comienza a moverse conjuntamente. Dado que es una colisión inelástica y desconocemos la energía perdida en dicha colisión, emplearemos únicamente el teorema de conservación del momento angular. Antes de la colisión la bola de plastilina es la única que se mueve (vplastilina), mientras que después, lo hace el sistema completo y con la misma velocidad angular, luego: Lantes = m2 r2 v plastilina 2 Igualando ambas cantidades v plastilina 3 3 m2 r2 v 2 = I polea ω + m1 r12ω + m2 r22ω 2 2 3 ⎛ ⎞ = ⎜ I polea + m1r12 + m2 r22 ⎟ω 2 ⎝ ⎠ Ldespués = I polea ω + m1 r1v1 + m2 r2 v plastilina 2 3 3 3 ⎛ ⎛ ⎞ ⎛ 2 2⎞ 2 2⎞ 2⎜ I polea + m1r12 + m2 r22 ⎟ ⎜ I polea + m1 r1 + m2 r2 ⎟ω 2⎜ I polea + m1 r1 + m2 r2 ⎟ ω 2 2 2 ⎠ = ⎝ ⎠v ⎠ = ⎝ =⎝ 0 m2 m2 r2 m2 r22 r2 2 (0.5 puntos) Donde se ha incluido el dato de que la masa de la pesa 2 tras el choque es 3m2/2. Nota: evidentemente, si durante el choque tratáramos a la pesa 2 independientemente de la polea y de la pesa 1, la expresión obtenida se simplificaría a vplastilina=3v0. Pero en ese caso, la cuerda no seguiría tensa. c) Fuera del equilibrio, las aceleraciones de las pesas 1 y 2, así como la aceleración angular de la polea ya no son nulas y debemos replantear las ecuaciones de la dinámica de translación (pesas) y de rotación (polea): r r 3 3 ∑i F ≠ 0 ∑i M ≠ 0 m1 g − T1 = m1a1 = m1αr1 T2 − 2 m2 g = 2 m2αr2 T1r1 − T2 R2 = I poleaα 3 m1r1 − m2 r2 2 Combinando las tres ecuaciones llegamos a : α = g 3 2 2 I polea + m1r1 + m2 r2 2 (0.75 puntos) Esta aceleración es negativa puesto que al ser m1r1=m2r2 (apartado a) y el numerador de α se hace negativo (m1r1 < 3m2r2/2). Esto quiere decir que al cabo de un tiempo tiempo, t, el sistema se parará debido a la aceleración contraria al sentido inicial de giro. Este tiempo se calcula según: v ω t=− 0 =− 0 ω = ω 0 + αt = 0 1 r2α α r r2 (0.25 puntos) T1 I T2 T1 m1 T2 m1g m2 m2g