Document
Anuncio

UNIVERSIDAD MAYOR DE SAN ANDRÉS
FACULTAD DE INGENIERÍA
INGENIERÍA ELECTRÓNICA
TRABAJOS PRÁCTICOS
EN EL ENTORNO MATLAB
APLICACIONES: TRANSFORMADAS INTEGRALES
SEÑALES Y SISTEMAS
Mg. Sc. Ing. Rafael Valencia Goyzueta
EJEMPLOS
Graficar la siguiente señal y sus
correspondientes variantes
La recta que va entre t 2
se calcula por
t0
t
geometría analítica y resulta x t 1 , por supuesto x t
2
entre 0 2 es 1 y cero en el resto del intervalo
Dominio dando margen a ambos lados
>>t=-3:0.05:3;
Averigua la longitud
>>L=length(t);
Primero todo cero
>>x=zeros(1,L);
Busca el -2
>>p1=find(t==-2);
Busca el cero
>>p2=find(t==0);
Busca el 2
>>p3=find(t==2) ;
Parte de la recta
>>x(p1:p2)=t(p1:p2)/2+1;
Parte constante
>>x(p2:p3)=1;
Habilita el manejo de los ejes
>>axis on
Se define la rejilla en t y en x
>>axis([-3 3 -0.1 1.1]);
Grafica
>>plot(t,x)
Traslación: Calcular y representar x1 t x t 3
Primera forma
La señal es la misma pero todos >>t1=t+3 ;
los puntos se trasladaran del >>x1=x ;
tiempo t a t+3. Para esto basta con >>plot(t1,x1)
sumar 3 a la base del tiempo
Segunda forma:
Movemos el vector de valores 3 unidades de tiempo hacia
delante y hacemos crecer la base de tiempo
Tres unidades de tiempo, no inicia
en cero porque se le añade a la >>t_aux=0.05 :0.05 :3 ;
derecha
Averigua cuantos valores son los
>>L3=length(t_aux) ;
tres segundos
Ceros para poner por la izquierda
>>x_aux=zeros(1,L3) ;
Los valores son los mismos con
>>x1=[x_aux x] ;
ceros por delante
Crea la nueva base de tiempo
>>t1=[t max(t)+t_aux] ;
>>plot(t1,x1)
Escalado: Calcular y representar x2 t x 2t
Se sabe que la señal es la misma
>>t2=t/2 ;
pero comprimida a la mitad. Por
>>x2=x ;
tanto el punto situado en t pasaría
>>plot(t2,x2)
a t/2, para esto basta con dividir
por dos la base de tiempo.
Ggg
Reflexión: Calcular y representar x3 t x t
Ahora se trata de que el punto situado en t pase a –t. La
primera idea seria cambiar de signo la base de tiempo, eso es
correcto pero no suficiente porque tanto la base de tiempo
como el vector de valores están en orden inverso al que
deberían. Eso se resuelve invirtiendo ambos vectores.
Invertimos la base de tiempo
>>t3=-t ;
Los valores son los mismos
>>x3=x ;
>>final=length(t3) ;
>>t3=t3(final :-1 :1) ;
Invertir
>>x3=x3(final :-1 :1) ;
>>plot(t3,x3)
Operación Suma: sumar las señales x t
x1 t
Para sumar dos señales debemos tener la misma base de
tiempo para ambas. Si consideramos las variables x1 y t1
tenemos mucho hecho. Viendo que t1 es la misma base de
tiempo de x pero extendida tres unidades de tiempo no hace
falta más que extender igualmente la base de tiempo de x (y
añadir el número adecuado de ceros a los valores de x).
Diferencia de longitudes temporales >>Lextra=length(t1)- length(t);
en numero de valores
Extiende la base de tiempo de x
Añade ceros a x
Mismo valor
Calcula la señal suma
>>t=t1 ;
>>x=[x zeros(1,Lextra)] ;
>>t4=t ;
>>x4=x+x1 ;
>>plot(t4,x4)
3
t 0.3se n t 0.2 sen t
50
50
10
Graficar las componentes par e impar para x t 0.6 sen
>>N=201;
>>L=(N-1)/2;
>>t=linspace(-L,L,N);
>>ai=pi*0.25;
>>bi=pi;
>>ci=1.5*pi;
>>d=0.6*sin(ai+0.02*pi*t)+0.3*sin(bi+0.06*pi*t)...
+0.2*sin(ci+0.10*pi*t);
>>par=zeros(1,N);
>>impar=zeros(1,N);
>>for i=1:N
>>par(i)=(d(i)+d(N+1-i))/2;
>>impar(i)=(d(i)-d(N+1-i))/2;
>>end
>>subplot(3,1,1);
>>plot(t,d, 'b');
>>title('Onda Original')
>>subplot(3,1,2);
>>plot(t,par, 'g');
>>title('Componente Par')
>>subplot(3,1,3) ;
>>plot(t,impar, 'r')
>>title('Componente Impar')
fffffff
x1 t u t 1 en
2 t 4.
x1 t u t
x2 t u t 1
en 10 t 10 .
Simular la señal
>>u = inline('t>=0')
>>t=-10:0.01:10;
>>x1 = u(t);
>>plot(t,x1)
>>axis([-10 10 -0.1 1.1]);
>>title('Señal 1a');
>>grid;
>>xlabel('tiempo (segundos)');
>>ylabel('x1(t)');
>>u = inline('t>=0')
>>t=-2:0.01:4;
>>x1 = u(t-1);
>>plot(t,x1)
>>axis([-10 10 -0.1 1.1]);
>>title('Señal 1a');
>>grid;
>>xlabel('tiempo (segundos)');
>>ylabel('x1(t)');
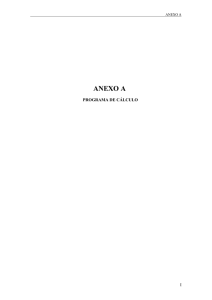
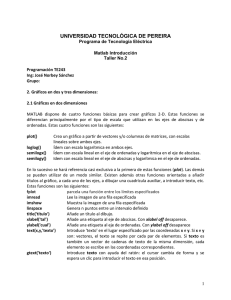
>>u = inline('t>=0')
>>t=-10:0.01:10;
>>plot(t,u(t),'r');
>>hold on;
>>plot(t,u(t-1),'k','linewidth',2);
>>axis([-10 10 -0.1 1.1]);
>>grid on;
>>title('Señal 1a');
>>xlabel('tiempo (segundos)');
>>ylabel('u(t), u(t-1)');
>>legend('u(t)', 'u(t-1)')
Señal 1a
u(t)
u(t-1)
1
0.8
0.6
u(t), u(t-1)
x1 t u t 1 en
10 t 10 .
0.4
0.2
0
-10
-8
-6
-4
-2
0
2
tiempo (segundos)
4
6
8
10
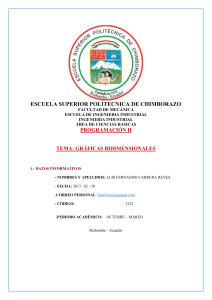
x t cos 2 400t cos 2 440t como una señal discreta finita causal de longitud o
dimensión N =10,000.
Longitud de la
N = 10000;
señal
Tiempo
de
muestreo
= Ts = 1/F;
100μsegundos
tn = 0*Ts:Ts:( N-1)*Ts;
x = [cos(2*pi*400*tn) +cos(2*pi*440*tn)];
xm = x(1:500);
tm = 0*Ts:Ts:499*Ts;
t=0:0.0001:0.05;
x=cos(2*pi*400*t)+cos(2*pi*440*t) ;
td=0:1/10000:0.05;
xn=cos(2*pi*400*td)+cos(2*pi*440*td);
subplot(2,1,1);
plot(tm, xm); grid;
xlabel('Tiempo [seg] ');
ylabel('x(t) ');
title('SEÑAL CONTINUA');
subplot(2,1,2);
stem(td,xn);
TRABAJO PRÁCTICO
SEÑALES Y SISTEMAS CON MATLAB
Para el sistema:
Representar la forma de la salida si esta es la entrada elevada al cuadrado y t x t
2
Representar la forma de la salida si esta es la entrada elevada al cuadrado y t x 2t 1
Representar la forma de la salida si esta es la entrada elevada al cuadrado y t 1 x 2 t 3
Graficar las siguientes señales
1
x t e 0.25t u t
2
x t e 0.25t sen 6 t
5
11
12
13
3
x t e 0.25t sen 6 t u t
5
14
4
sen 6t
x t
6t
2 t 4
j6 t
5
e
15
x t e
2 t
2 t 4
2t
x t 2 0.5t
0
2 t 0
0t 2
resto
x t
1
j t
e 5 5
x t
0.2 j 6 t
5
e
x(t ) 5sin c t 1 comb t
4 2
2
5
x t
6
x(t ) 2rect t
7
x(t ) 8 comb 4t
17
t 1
x(t ) 6tri
2
18
8
x(t ) 2 1 e5t u t 21 e
x(t ) 5drcl t , 7
19
x(t ) et 4e3t e2t
20
x(t ) 14.5 e0.87t e9.12t t
9
10
16
3
t
x(t )
4
x(t ) A 1 cos t P t
2
3 A2
a 1 2 a a 1 da
x(t ) rect t 1 rect t 1
2
2
u
10 t 12
t 12
Dibujar las señales, su parte par e impar, y reconstruir la señal original a partir de ellas:
1
x t e
t 1
2
2 1 t 3
x t
resto
0
3 x t 3sen 6 t
4 x t 4 cos 2 t
Representar gráficamente las siguientes señales
a) x t 0.5t 1 Donde t es un pulso de anchura 1 centrado en el origen.
b) x t 2t 2 (Sobre el intervalo 2, 10 ) donde t es una función “triángulo” que
comienza en (-1,0), llega a (0,1) y termina en (1,0)
c)
2
t
x t sen
d) x(t )
e) x(t )
(Sobre el intervalo 20, 20 )
t
2
t 3n t 1 3n
n
t 2n 2 t 3n
n