Sistemas Lineales. Función de transferencia
Anuncio

MT227
Sistemas Lineales. Función de transferencia
Elizabeth Villota
1
Sistemas Lineales
Sistema no lineal, forma espacio de estados:
Sea la salida
correspondiente a la condición inicial
entrada
escrita como
Un sistema es lineal si:
Sistema lineal, forma espacio de estados:
donde
2
y
Invariancia en el tiempo
Concepto importante usado para describir aquellos sistemas cuyas
propiedades
p
p
no cambian en el tiempo.
p
ENTRADA
SALIDA
-A UNA MISMA ENTRADA APLICADA EN UN TIEMPO POSTERIOR, MISMA SALIDA
PERO DESFASADA -
Un sistema lineal e invariante en el tiempo se denomina SLIT (sistema lineal
invariante en el tiempo,
tiempo LSI por sus siglas en inglés)
3
Sistema lineal invariante en el tiempo
RELACION ENTRADA-SALIDA
Para una entrada arbitraria ésta se divide en pequeños escalones y los
efectos de cada escalón contribuyen a la salida del sistema
ENTRADA
4
: respuesta al escalón unitario
: respuesta al impulso unitario
SALIDA
(integral de convolución)
S l ió de
Solución
d lla ecuación
ió espacio
i de
d estados
t d lineal
li l
Sistema lineal:
Respuesta a las
condiciones
iniciales
(entrada cero)
+
Respuesta a la
entrada
(condiciones
iniciales cero)
=
Respuesta total
5
S l ió de
Solución
d lla ecuación
ió espacio
i de
d estados
t d lineal
li l
Respuesta a las condiciones iniciales:
(entrada cero)
Resolviendo la EDO:
-
: matriz de transición
Respuesta a la entrada:
( di i
(condiciones
i i i l cero))
iniciales
Usando la integral de convolución:
: respuesta impulsiva
6
Solución de la ecuación espacio de estados lineal
Sistema lineal:
Resolviendo la EDO:
Si Re
R λ(A) < 0 la
l respuesta
t decrece
d
en ell tiempo
ti
(CONDICIÓN DE ESTABILIDAD!)
Salida:
Respuesta = Respuesta a las
Respuesta a la entrada
condiciones
di i
i i i l + (condiciones iniciales cero)
iniciales
total
7
(entrada cero)
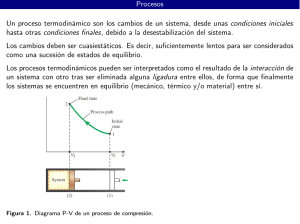
SLIT 2do orden (masa-resorte-amortiguador)
(
t
ti d )
Representación espacio de estados:
o
Ecuación de movimiento:
Solución:
y
dividiendo por la masa:
Autovalores: λ(A)
ωo
o
: factor de amortiguamiento
: frecuencia natural
8
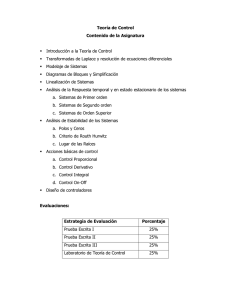
plano-s
Como Re λ(A) < 0
luego sistema
estable!
Plano s Relación entre Re λ(A), estabilidad y respuesta en el tiempo
Plano-s.
x
SISTEMA
INESTABLE
SISTEMA
ASINTÓTICAMENTE
ESTABLE
9
SISTEMA
CRÍTICAMENTE
ESTABLE
Respuesta transitoria y en estado estacionario
Respuesta
total
10
=
Respuesta
transitoria
+
Ocurre luego
O
l
que se aplica
li la
l
entrada y refleja la diferencia
entre la condiciòn inicial y la
solución en estado
estacionario.
Respuesta en estado
estacionario
Refleja
R
fl j comportamiento
t i t a
largo plazo bajo ciertas
entradas
Respuesta en estado estacionario.
estacionario Solución
ENTRADA: Escalón unitario
Respuesta transitoria
11
Respuesta en estado estacionario
Respuesta en estado estacionario.
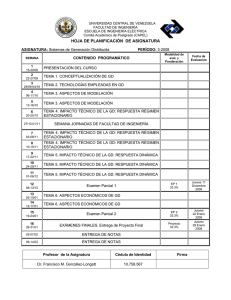
estacionario SLIT 1er
1 orden
d
ENTRADA: Escalón magnitud
g
uo
[
uo
:
b
1
t
t
uo
u
y (t ) 1 e m o 1 e
b
b
Constante de tiempo, parámetro que
caracteriza la respuesta de sistemas SLIT
de 1er orden.
Valor en el que la respuesta alcanza el
63 2% de su valor final.
63.2%
y (t
Respuesta
transitoria
u
m uo
m
)
1 e 1 63.2% o
b
b
b
b
12
] uo
Respuesta en estado
estacionario
Respuesta en estado estacionario.
estacionario SLIT 1er
1 orden
d
ENTRADA: Escalón magnitud
g
uo
[
uo
:
b
1
t
t
uo
u
y (t ) 1 e m o 1 e
b
b
Constante de tiempo, parámetro que
caracteriza la respuesta de sistemas SLIT
de 1er orden.
Valor en el que la respuesta alcanza el
63 2% de su valor final.
63.2%
y (t
u
m uo
m
)
1 e 1 63.2% o
b
b
b
b
13
] uo
Respuesta
transitoria
Respuesta en estado
estacionario
Respuesta en estado estacionario.
estacionario SLIT 2do
2d orden
d
ENTRADA: Escalón unitario
o
y (t ) k o (1
Respuesta
transitoria
14
e ot
1
2
sin( d t ))
Respuesta en estado
estacionario
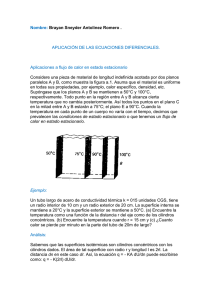
Respuesta en estado estacionario. SLIT ≥2do orden
ENTRADA: Escalón unitario
y ss : Valor en estado estacionario.
Valor final de la salida.
M p :Sobreimpulso. Porcentaje(%)
que el valor pico excede al
valor
alor final.
final
Tr : Tiempo de subida. Tiempo
requerido
q
ppara qque la señal
pase del 10% a 90% del valor
final.
establecimiento
Ts : Tiempo de establecimiento.
Cantidad de tiempo requerido
para una señal permanecer
dentro de un 2% de su valor
final para tiempos futuros.
15
Respuesta en estado estacionario.
estacionario Solución
ENTRADA: Función senoidal
Función de
transferencia
Respuesta transitoria
Fó l dde Euler:
Fórmula
E l
Sea:
16
y
Respuesta en estado estacionario
Función de Transferencia (FT)
RELACIÓN ENTRADA-SALIDA DE UN SISTEMA LINEAL EN EL DOMINIO DE LA FRECUENCIA
s
s
Forma espacio de estados
Función de transferencia
λ(A)={s / det(sI-A) = 0}
=0
polos={ s / d(s) = 0}
λ(A) = polos
l sistema
it
17
n( s )
d (s)
ceros: { s / n(s) = 0}
polos
l : { s / d(s) = 0}
Función de transferencia – sistemas varios
s
18
s
Matriz de transferencia – más
á de
d una entrada
t d o salida
lid
PÉNDULO INVERTIDO EN EL CARRITO
Ecuación de movimiento no lineal
Ecuación de movimiento lineal
Usando transformada de Laplace
Funciones de transferencia
19
Interpretación función de transferencia
RELACIÓN ENTRADA-SALIDA DE UN SISTEMA LINEAL EN EL DOMINIO DE LA FRECUENCIA
: magnitud y
: fase del número complejo
Cuando
se dice que
forzamiento dada.
20
y
.
son la ganancia y fase a una frecuencia
de
Interpretación función de transferencia
RELACIÓN ENTRADA-SALIDA DE UN SISTEMA LINEAL EN EL DOMINIO DE LA FRECUENCIA
21
Función de transferencia: polos,
l ceros y ganancia
i
Ganancia en la frecuencia cero (
):
En un sistema lineal con función de transferencia racional: G ( s) n( s)
d (s)
Ceros: { s / n(s) = 0} Si s
el sistema se denomina de fase mínima, de lo
contrario se denomina de fase no mínima.
P l { s / d(s)
Polos:
d( ) = 0} Si s
se dice
di que ell sistema
i t
es estable,
t bl caso contrario
t i
es inestable.
E un sistema
En
i
li l con representation
lineal
i espacio
i de
d estados:
d
Ceros (ceros de transmisión) : s/ A sI
22
C
0
D
B