Laboratorio Virtual y Remoto para la Ense˜nanza de Rob´otica
Anuncio

Laboratorio Virtual y Remoto para la Enseñanza de
Robótica Paralela
Francisco J. Martı́nez, Ramón González, Francisco Rodrı́guez, José Luis Guzmán
{fmg526, rgonzalez, frrodrig, joguzman}@ual.es
Dpto. de Lenguajes y Computación. Universidad de Almeria. Ctra. Sacramento s/n, 04120 Almerı́a.
Abstract— En este trabajo se presenta una herramienta software para la enseñanza de robótica paralela. Esta herramienta
permite a los alumnos simular la cinemática directa e inversa
de este tipo de robots. Además, en esta herramienta software
se ha integrado la posibilidad de interactuar con un robot
paralelo real (ensamblado mediante el kit Lego NXT) utilizando
un joystick permitiendo acceso local y remoto. La herramienta
software desarrollada se ejecuta de forma remota y no necesita
la instalación de ningún software especı́fico, simplemente un
navegador Web y una conexión a Internet.
I. I NTRODUCCI ÓN
La Robótica constituye un campo cada vez más integrado
en el mercado mundial, con aplicaciones en multitud de campos, siendo los más destacados: robots domésticos (limpieza,
entretenimiento, etc.), robots industriales (transporte, ensamblado, etc.), robots de servicios (medicina, educación, etc.),
robots para seguridad (inspección, manipulación, etc.) y robots
espaciales (exploración, satélites, etc.), [1], [2]. Las ventajas
de cualquier sistema robotizado están muy bien reconocidas,
tales como aumento de la producción y reducción de costes,
flexibilidad en la fabricación de productos, elevada calidad
de los productos finales, sustitución de seres humanos en
operaciones perjudiciales para la salud, etc. [3].
Por otro lado, la enseñanza en Robótica constituye un campo de formación muy amplio y permite a los estudiantes integrar conocimientos de geometrı́a, electrónica, programación,
control automático y mecánica, entre otros [3].
Por todo ello, se hace evidente incentivar los estudios en
Robótica y desarrollar nuevas metodologı́as de enseñanza y
herramientas docentes que ayuden a los estudiantes a una
mejor compresión y formación en este campo heterogéneo y
complejo. Además, el nuevo Espacio Europeo de Educación
Superior (EEES), requiere que los estudiantes puedan desarrollar parte del trabajo de una materia de forma autónoma y se
incentiva el trabajo no presencial.
Actualmente, la comunidad educativa cuenta con herramientas muy útiles para la enseñanza de asignaturas relacionadas
con la Robótica. Algunas de estas herramientas es el Robotics
Toolbox para Matlab [4], el cual se centra principalmente en
robots manipuladores. También existen varias herramientas o
laboratorios remotos relacionados con robótica de manipulación. Por ejemplo, dentro de la red española AutomatL@bs
se encuentra el entorno RobUALab que permite trabajar con
un simulador 3D de un brazo robot Scorbot ER-IX y permite
ejecutar remotamente el robot real ubicado en la Universidad
de Alicante [5].
En relación a los robots móviles, existen simuladores y
herramientas interactivas muy interesantes donde se ponen
en práctica conceptos como algoritmos de planificación de
rutas, estrategias de navegación, algoritmos de control de navegación, etc. Un resumen amplio de este tipo de herramientas
se presenta en [6]. Una de estas herramientas interactivas es
MRIT [7], donde el alumno puede probar varios algoritmos
de planificación de rutas añadiendo obstáculos al entorno.
Desde un punto de vista hardware, existen varias plataformas propicias para aspectos relacionados con la enseñanza de
robótica, por su facilidad de programación, sistema sensorial,
actuadores y capacidades [8], [9]. Una de las plataformas que
más se esta utilizando para el desarrollo de prácticas con robots
(sobretodo móviles) es el Lego NXT [10]. Existen numerosas
publicaciones donde se describe la aplicación exitosa de esta
“plataforma” a la enseñanza de Robótica [11], [12], [13].
Este artı́culo esta relacionado con la enseñanza de robótica
paralela. Los robots paralelos son mecanismos de lazo cerrado
que presentan muy buen rendimiento en términos de exactitud,
rigidez y capacidad para manipular grandes cargas. Por ello,
son usados en numerosas aplicaciones tales como, simuladores
de vuelo, posicionamiento de radiotelescopios, aplicaciones
médicas (cirugı́a) y aplicaciones industriales [14], [15]. En
este caso, la enseñanza de robótica paralela también cuenta
con algunas publicaciones interesantes y exitosas, por ejemplo,
en [13] se presenta un robot paralelo usando piezas Lego y
una herramienta de simulación implementada en Matlab. En
[16], se describe la experiencia en el montaje de estructura
paralelas en prácticas de laboratorio por estudiantes de grado.
En este trabajo se presenta la experiencia de la Universidad
de Almerı́a en el desarrollo de un laboratorio virtual y remoto
de un prototipo de robot paralelo. Primero, se ha ensamblado
un robot paralelo tı́pico tipo 3-PUU utilizando un kit de
montaje Lego NXT [10]. Posteriormente, se ha desarrollado
una herramienta software que permite a los alumnos simular la
cinemática directa e inversa de este tipo de robots. Además, en
esta herramienta se ha integrado la posibilidad de interactuar
con el robot paralelo real utilizando una Webcam y un joystick.
Esta herramienta se ejecuta de forma remota y no necesita
la instalación de ningún software especı́fico, simplemente
necesita de un navegador Web y una conexión a Internet.
II. D ISE ÑO DE LA MAQUETA DE ROBOT PARALELO
II-A. Prototipo mecánico de robot paralelo
Un robot paralelo, también denominado robot de cadena
cerrada o manipulador paralelo, consiste básicamente en una
plataforma móvil unida a una base fija por medio de varias
cadenas cinemáticas [13]. Cada cadena está gobernada por un
actuador. En general, estos robots paralelos pueden manipular
un mayor peso, dado que éste se encuentra repartido entre las
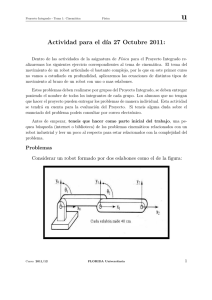
distintas cadenas que componen el robot. Existen diversas arquitecturas de robots paralelos dependiendo fundamentalmente
del tipo y el número de juntas entre la plataforma móvil y la
fija [14], [17]. En la Fig. 1 se observa una arquitectura tı́pica
tipo Gough-Stewart con 6 juntas esféricas entre la base fija y
la plataforma móvil.
Fig. 1. Plataforma paralela clásica tipo Gough-Stewart
Para la construcción del prototipo de robot paralelo se ha
utilizado el kit Lego Mindstorms NXT [10], debido a la gran
cantidad de piezas existentes y la gran facilidad para recibir y
enviar datos a los diferentes sensores y actuadores que posee.
Buscando la mayor simplicidad y robustez posible en la
plataforma móvil, se estudiaron dos plataformas, una con
forma triangular y otra con forma hexagonal. La plataforma triangular presenta un mejor comportamiento frente a la
plataforma hexagonal, ya que al tener un menor peso, se
obtiene una precisión mayor en los movimientos y la estructura
mecánica es más simple.
Los grados de libertad que proporciona el prototipo de robot
paralelo desarrollado son tres, dos movimientos de rotación
sobre los ejes X e Y, y uno de traslación sobre el eje Z
(ver Fig. 2). Con estos tres movimientos se pueden simular
una gran cantidad de aplicaciones, como aviones, helicópteros,
automóviles, etc. Para conseguir los anteriores movimientos o
grados de libertad, se han de considerar las distintas juntas
o enlaces mecánicos de la cadena cinemática. En este caso,
se ha seleccionado una arquitectura 3-PUU (Prismática, Universal, Universal) [18]. La articulación prismática que será la
encargada de proporcionar el movimiento sobre el eje Z.
La combinación de la articulación prismática con las dos
articulaciones universales serán las encargadas de proporcionar
los movimientos de rotación sobre los ejes X e Y.
Como se observa en la Fig. 2, el robot paralelo, está formado
por una plataforma fija donde se encuentran los actuadores,
que son los encargados de desplazar la cadena cinemática
sobre la articulación prismática. Para simular las articulaciones
prismáticas con las piezas del kit Lego se ha utilizado el
mecanismo tuerca-husillo. La plataforma fija tiene forma triangular donde cada uno de los actuadores se encuentran situados
a 30 [o ], 150 [o ] y 270 [o ] sobre el eje X.
Fig. 2. Movimientos del robot paralelo desarrollado
II-B. Restricciones del espacio de trabajo
Como se ha comentado en la Sección II-A, se ha construido
el prototipo con piezas Lego. En diversos experimentos realizados se ha observado que para rotaciones superiores a ±30
[o ], la plataforma móvil pierde rigidez, llegando incluso a la
fractura. Por ello, los ángulos de rotación ψ y θ se han limitado
a ese rango. El movimiento de traslación sobre el eje ZG
podrá tomar valores en el rango [-8.5, 6.5] [cm]. También se
ha de comprobar que el recorrido requerido por los actuadores
esté dentro del rango [−15, 0] [cm].
Por lo tanto, cualquier posición de la plataforma móvil
que requiera un valor en alguno de sus actuadores sobre el
husillo fuera del rango anteriormente descrito, o bien requiera
rotaciones y desplazamientos fuera de los rangos indicados,
será una posición no válida y el robot no se moverá hasta que
el usuario introduzca una nueva posición permitida.
II-C. Modelado de robot paralelo tipo 3-PUU
El problema cinemático de cualquier robot, consiste en relacionar la posición y la orientación correspondiente al efector
final con los valores que toman sus coordenadas angulares. En
este punto, se derivan dos problemas fundamentales. El problema cinemático directo consiste en determinar la posición y
la orientación de la plataforma móvil con respecto a un sistema
de coordenadas que se toman como referencia. Por otro lado,
el problema cinemático inverso consiste en determinar el valor
de las articulaciones, para que el efector final del robot alcance
una posición y orientación determinadas.
cierre en relación al actuador 2 [13],
En el caso de robots paralelos, el problema cinemático se
centra en encontrar un modelo que permita relacionar los
actuadores colocados en la plataforma fija y el centro de la
plataforma móvil, ver Fig. 3.
=
−−→
AP2 |X
−−→
AP2 |Y
−−→
AP2 |Z
=
=
−→ −−−→ −−−→
AO + OXG + XG P2 ,
−−→
−→ −−→
XY Z −
AO + OYG + RX
0 Y 0 Z 0 Y G P2 ,
−→ −−−→
XY Z −−−→
AO + OZG + RX
0 Y 0 Z 0 Z G P2 ,
(1)
donde la matriz de rotación esta definida por,
XY Z
RX
0 Y 0 Z 0 = R(ψ, θ, φ) =
cθcφ
−cθsφ
= sψsθcφ + cψsφ −sψsθsφ + cψcφ
−cψsθcφ + sψsφ cψsθsφ + sψcφ
sθ
−sψcθ,
cψcθ
(2)
y las variables φ, ψ y θ representan los ángulos de rotación
roll, pitch y yaw, respectivamente, donde c es el coseno y s
el seno de cada ángulo de rotación (ver Fig. 2).
Sustituyendo en las ecuaciones (1), los valores de las
variables y de la matriz (2), se obtiene,
AP2 |X = −cδ2 D + XG + (cθcφ)cδ2 D1 +
+(−cθsφ)sδ2 D1 ,
(a) Nomenclatura utilizada para modelado cinemático
AP2 |Y = −sδ2 D + YG + (sψsθcφ +
+cψsφ)cδ2 D1 + (−sψsθsφ +
(3)
+cψcθ)sδ2 D1 ,
AP2 |Z = −a2 + ZG + (−cψsθcφ +
+sψsφ)cδ2 D1 + (cψsθsφ + sψcφ)sδ2 D1 .
A continuación, se impone la condición de que la norma
(distancia euclı́dea en el espacio) de estos tres vectores sea
igual a la longitud del brazo que une ambas plataformas,
(AP2 |X )2 + (AP2 |Y )2 + (AP2 |Z )2 = L2 ,
(b) Vectores de cierre utilizados para actuador 2
Fig. 3. Esquema para la cinemática del robot paralelo desarrollado
La notación empleada en la Fig. 3 es: [XG YG ZG ]
representa el centro de gravedad de la plataforma móvil, con
respecto al sistema de referencia fijo [X Y Z]. Los vértices
de la plataforma móvil son [P1 P2 P3 ], la posición de los
actuadores a lo largo del husillo en el eje Z [a1 a2 a3 ],
los ángulos que forman el triángulo de la plataforma son
[δ1 δ2 δ3 ] = [270o 30o 150o ], D, D1 definen la longitud
desde los vértices hacia el centro de gravedad de la plataforma
fija y móvil, respectivamente, su longitud es de 7 [cm], L es
la longitud de los brazos que unen la plataforma fija con la
plataforma móvil, siendo de 6.5 [cm].
Planteando la ecuación de cierre de lazo indicada en la Fig.
3b, es posible determinar el comportamiento cinemático del
robot paralelo, en este caso, se plantean las ecuaciones de
(4)
se obtiene la ecuación que rige el movimiento del brazo
actuado por el actuador 2, que une la plataforma móvil a través
del punto P2 con la plataforma fija a través del punto A. De
este modo, sustituyendo en (4) las ecuaciones (3), se obtiene
la ecuación,
[−cδ2 D + XG + (cθcφ)cδ2 D1 +
+(−cθsφ)sδ2 D1 ]2 + [−sδ2 D + YG + (sψsθcφ +
+cψsφ)cδ2 D1 + (−sψsθsφ + cψcφ)sδ2 D1 ]2 +
+[−a2 + ZG + (−cψsθcφ + sψsφ)cδ2 D1 +
+(cψsθsφ + sψcφ)sδ2 D1 ]2 = L2 .
(5)
Dado que los movimiento de traslación sobre los ejes X
e Y no se encuentran permitidos, las incógnitas espaciales
[XG , YG ] permanecerán constantes. Ambas incógnitas tendrán
el valor 0 correspondientes a las coordenadas del centro de
gravedad de la plataforma móvil. El movimiento de rotación
sobre el eje Z, tampoco se encuentra permitido de forma que
el ángulo φ será igual a 0o , simplificando la ecuación previa
Fig. 4. Esquema de control del robot paralelo
como,
III.
2
[−cδ2 D + (cθcφ)cδ2 D1 ] +
+[−sδ2 D + (sψsθcφ)cδ2 D1 +
2
+(cψcφ)sδ2 D1 ] + [−a2 + ZG +
+(−cψsθcφ)cδ2 D1 + (sψcφ)sδ2 D1 ]2 = L2 .
(6)
Finalmente se obtienen las ecuaciones cinemáticas para el
resto de actuadores,
[−cδ1 D + (cθcφ)cδ1 D1 ]2 +
+[−sδ1 D + (sψsθcφ)cδ1 D1 +
+(cψcφ)sδ1 D1 ]2 + [−a1 + ZG +
+(−cψsθcφ)cδ1 D1 + (sψcφ)sδ1 D1 ]2 = L2 ,
(7)
[−cδ3 D + (cθcφ)cδ3 D1 ]2 +
+[−sδ3 D + (sψsθcφ)cδ3 D1 +
+(cψcφ)sδ3 D1 ]2 + [−a3 + ZG +
+(−cψsθcφ)cδ3 D1 + (sψcφ)sδ3 D1 ]2 = L2 .
(8)
Utilizando las ecuaciones (6)-(8) es posible resolver tanto la
cinemática directa como la inversa. En la cinemática directa
los datos que se asumen conocidos son los grados de giro
de los actuadores (a1 , a2 , a3 ), mientras que las incógnitas
serán (ZG , ψ, θ) que definen la posición del centro geométrico
de la plataforma móvil. En la cinemática inversa los datos
conocidos serán la posición de la plataforma móvil (ZG , ψ, θ),
mientras que las incógnitas son la posición de cada uno de
los actuadores sobre los husillos (a1 , a2 , a3 ). Al tratarse de
ecuaciones no lineales se ha utilizado un método iterativo
para su resolución. En este caso, se ha utilizado el método
de Newton-Raphson [19].
D ESCRIPCI ÓN DEL L ABORATORIO V IRTUAL Y
R EMOTO
La herramienta desarrollada tiene tres partes fundamentales.
La primera de ellas consiste en un simulador de la cinemática
inversa, la segunda un simulador de la cinemática directa,
y finalmente un sistema de control remoto de la plataforma
real con realimentación visual mediante una Webcam. Para la
implementación de los simuladores y el software de control
remoto de la plataforma real, se ha utilizado el entorno
LabVIEW de National Instruments [20] junto con Matlab de
The MathWorks [21].
III-A. Arquitectura de Control del Prototipo
La arquitectura de control del prototipo de robot paralelo se
presenta en la Fig. 4. El prototipo de robot paralelo podrá ser
controlado por el usuario mediante un joystick. En este caso,
se utiliza para introducir las coordenadas espaciales ψ, θ, ZG ,
necesarias para definir la orientación y la posición de la
plataforma móvil.
Primero, se aplica la cinemática inversa a la posición
introducida por el usuario y se comprueba que la posición de
cada actuador, se encuentra en el rango de trabajo permitido
(ver Sección II-B). Posteriormente, dado que la posición que
ha de tener cada uno de los actuadores a lo largo del husillo
viene expresada en distancia (centı́metros), se ha de realizar
la conversión a desplazamiento angular (giros necesarios para
que los actuadores alcancen la posición determinada). Para
ello, se han realizado pruebas experimentales para determinar
la relación entre un giro completo del motor y el desplazamiento en el husillo. En este caso, la relación es 1giro =
0,16[cm]. Para conseguir que el motor realice el número de
giros apropiados, se ha implementado un controlador en bucle
abierto.
Cuando finaliza la ejecución de una prueba, el prototipo se
mueve directamente a una posición referencia o de reposo. En
este caso, la posición es la ψ = 0[o ], θ = 0[o ], ZG = 6.5 [cm].
III-B. Laboratorio Remoto de Cinemática Paralela
Como se aprecia en la Fig. 5, el programa de control
del robot paralelo se ejecuta en un navegador Web. Esta
herramienta permite al usuario realizar una trayectoria con el
prototipo. El usuario sólo ha de marcar una posición con un
joystick y a continuación pulsar el botón frontal de éste para
que el prototipo se dirija al punto marcado por el usuario.
El usuario no podrá enviar nuevas posiciones hasta que el
prototipo no haya alcanzado la última posición indicada por
el usuario. De este modo, el prototipo sigue la trayectoria
introducida por el usuario de forma online. Además, como
se observa en la figura, se obtiene un video en tiempo real
que refleja los movimiento reales del robot paralelo. También
se ha añadido una gráfica con el resultado del modelo cinemático directo. Otra forma de interactuar con el prototipo es
introduciendo una lista de posiciones calculadas previamente,
sin necesidad de utilizar el joystick.
La principal ventaja de esta herramienta es que el usuario
puede realizar prácticas con los simuladores y después probar
los mismos ejercicios con el robot real.
El inconveniente radica en la lentitud de los movimientos
del prototipo, dado que el tiempo que tarde en alcanzar la posición introducida por el usuario es considerablemente superior
al tiempo que tarda el usuario en marcarla con el joystick.
Este hecho es producido por las limitaciones mecánicas de la
estructura y la propia dinámica del movimiento tuerca-husillo.
III-C. Laboratorio Virtual de Cinemática Paralela
En la herramienta desarrollada, se han implementado dos
simuladores también, uno de la cinemática inversa y otro de
la cinemática directa. El simulador de cinemática inversa posee
como variables de entrada la orientación de la plataforma
móvil (ángulos ψ sobre el eje X y θ sobre el eje Y ) y la
posición de ésta sobre el eje Z. Las variables de salida serán
la posición de cada uno de los tres actuadores a lo largo del
husillo para que la plataforma móvil alcance la posición y
orientación deseadas. En el caso del simulador de cinemática
directa será al contrario. La Fig. 6 muestra la interfaz del
programa de cinemática inversa.
La variables de entrada serán introducidas mediante los
componentes “knob” etiquetados con “Yaw” y “Pitch” y el
“slider” etiquetado con “Zg ”. Por otro lado, la posición de cada
actuador a lo largo del husillo, en centı́metros, es representada
por los componentes “slider” etiquetados con “Actuador 1”,
“Actuador 2” y “Actuador 3”. Además se incluye el campo
“Posicion”, que representa si la posición introducida es admisible o no admisible comprobando las restricciones planteadas
sobre el robot paralelo (ver Sección II-B).
Fig. 6. Interfaz del simulador de cinemática inversa
IV.
E JEMPLOS ILUSTRATIVOS
En esta sección se comentan varios ejemplos de manejo
del robot paralelo utilizando el programa de control remoto
desarrollado. Para ello, se han especificado con el joystick
varias trayectorias tı́picas de movimiento de robots paralelos,
como son trayectoria circular, trayectoria tipo “8” y trayectoria
espiral.
Las trayectorias seguidas por el prototipo se realizan en
bucle abierto, es decir, no se garantiza que la posición de la
plataforma móvil sea la especificada por el joystick. Como
se comentó en la Sección III-B, sólo se comprobará que
los motores han recorrido la distancia proporcionada por el
modelo cinemático inverso.
Primero se ha probado una trayectoria circular. En esta
trayectoria se varı́an los ángulos ψ y θ. Además, se variará ZG
en función de la inclinación de la plataforma móvil, para
conseguir que el centro de gravedad de dicha plataforma se
encuentre siempre en la misma posición sobre el eje Z. En
la Fig. 7 se observa la trayectoria circular marcada como
referencia y la trayectoria real que ha seguido el centro de
la plataforma móvil del robot paralelo (modelo cinemático
directo utilizando los datos leı́dos de los codificadores de los
motores). Obsérvese que el punto inicial y el punto final es el
mismo. Sin embargo, sufre una variación en los ejes X e Y, y
sobre todo en el eje Z. Este hecho es debido a la acumulación
del error. A medida que la plataforma móvil se dirige a los
distintos puntos que componen la trayectoria de referencia,
se va acumulando un error por cada punto alcanzado, de
forma que al principio de la trayectoria el error cometido es
pequeño, pero se va aumentando conforme se van alcanzando
más puntos de la trayectoria. En este caso, se han obtenido
unos errores máximos de 0.6 [cm] en el eje ZG , de 7 [o ] en
el ángulo ψ y 3.4 [o ] en el ángulo θ.
También se ha probado una trayectoria con forma de
“8” para comprobar el correcto funcionamiento del prototipo
cuando se realizan dos cı́rculos en sentidos opuestos. En esta
trayectoria se varı́an los ángulos ψ y θ. En este caso, se
ha supuesto un radio de 1 [cm] para cada circunferencia.
En la Fig. 8 se muestra la trayectoria de referencia y la
Fig. 5. Interfaz de la herramienta de control remoto del robot paralelo
trayectoria seguida por el robot. Como era de esperar tras
analizar la primera prueba realizada, se puede observar que el
error cometido en la realización del segundo circulo es mayor
al error cometido durante el primero. En este caso, se han
obtenido unos errores máximos de 1 [cm] en el eje ZG , de
6.3 [o ] en el ángulo ψ y 8.3 [o ] en el ángulo θ.
Finalmente, se ha probado una trayectoria tipo espiral (ver
Fig. 9). Para ello, se va a realizar un movimiento circular
ascendente, con una diferencia de 4 [cm] entre el punto inicial
y el final. En este caso, los errores cometidos en el seguimiento
de la trayectoria en espiral por el prototipo son mı́nimos. Al
contrario, de lo que sucedı́a con las trayectorias anteriores,
no se observa gran variación en la posición del centro de
gravedad de la plataforma móvil sobre el eje Z. Este hecho se
debe a que en cada punto de la trayectoria se incrementa la
coordenada ZG y dado que el movimiento de la trayectoria es
en sentido opuesto a la gravedad, la inercia de los actuadores se
ve compensada. En cambio, si la espiral se realiza en sentido
contrario, las holguras en los actuadores y en el sistema de
husillos provocan un mayor error. En este caso se han obtenido
unos errores máximos de 0.1 [cm] en el eje ZG , de 4 [o ] en
el ángulo ψ y 2.4 [o ] en el ángulo θ.
V.
P R ÁCTICAS DOCENTES
La herramienta desarrollada permitirá plantear la realización
de varias prácticas introductorias al modelado y control de
robots paralelos en materias relacionadas con la robótica en
la Universidad de Almerı́a tanto en estudios de grado como
en estudios de posgrado. Además, debido a que las prácticas
se pueden realizar de forma remota favorecerá el trabajo
autónomo por parte del alumno. Recuérdese que este es uno
de los objetivos básicos del Espacio Europeo de Educación
Superior.
Por ello, se plantearán prácticas desde el punto de vista
de modelado cinemático de robot paralelos, generación de
trayectorias a partir de simulación del movimiento de los
motores, u obtención del movimiento de los motores a partir de
una trayectoria. También se propondrá al alumno el estudio de
un sistema sensorial adecuado y de controladores apropiados
para asegurar que el robot siga la trayectoria de referencia
planteada (seguimiento de trayectorias).
Finalmente, para estudios avanzados se propondrá la modificación de la actual estructura mecánica del robot (3-PUU)
a estructuras más complejas tipo hexapodo junto con su
modelado y control.
VI. C ONCLUSIONES Y TRABAJOS FUTUROS
En este trabajo se ha presentado un laboratorio virtual y
remoto de un prototipo de robot paralelo. Primero, se ha
ensamblado un robot paralelo utilizando un kit de montaje
Lego NXT. Debido a la fragilidad de las piezas se ha optado
por utilizar una estructura tipo 3-PUU donde las plataformas
fija y móvil tiene forma triangular. La herramienta desarrollada
integra un simulador de la cinemática directa e inversa del
robot paralelo y además permite la interacción con el robot
paralelo real utilizando una Webcam y un joystick. Esta
herramienta simplemente necesita de un navegador Web y una
conexión a Internet.
En futuros trabajos se abordará el control en bucle cerrado
de la posición del centro de la plataforma móvil. Para ello,
se pueden utilizar sensores tipo IMU para obtener los tres
ángulos de Euler de la plataforma y un sensor tipo sonar o
infrarrojo para calcular la distancia del centro de la plataforma
al suelo. También se estudiarán nuevos elementos estructurales
para reforzar la estructura mecánica.
Fig. 7. Trayectoria circular
Fig. 8. Trayectoria tipo 8
R EFERENCES
[11] J.M. Gómez de Gabriel, A. Mandow, J. Fernández-Lozano y A. Garcı́aCerezo, “Using Lego NXT mobile robots with LabVIEW for undergraduate courses on mechatronics ” IEEE Transactions on Education, no. 99,
pp. 1-7, 2010.
[12] P. Fiorini, “Lego Kits in the Lab ” IEEE Robotics and Automation
Magazine, vol. 12, no. 4, pp. 5, 2005.
[13] M. Garcı́a-Sanz, M. Motilva, “Herramientas para el estudio de robots
de cinemática paralela: simulador y prototipo experimental ” Revista
Iberoamericana de Automática e Informática Industrial, vol. 2, no. 2,
pp. 73-81, 2005.
[14] J.P. Merlet, Parallel Robots. 2nd Edition, Ed. Springer, 2006.
[15] R. Aracil, R.J. Saltarén, J.M. Sabater y O. Reinoso, “Robots paralelos:
Máquinas con un pasado para una robótica del futuro ” Revista Iberoamericana de Automática e Informática Industrial, vol. 3, no. 1, pp. 16-28,
2006.
[16] I. Ebert-Uphoff, “Introducing parallel manipulators through laboratory
experiments ” IEEE Robotics and Automation Magazine, vol. 10, no. 3,
pp. 13-19, 2003.
[17] I.A. Bonev, J. Ryu, “Orientation workspace analysis of 6-DOF parallel
manipulators ” ASME Design Engineering Technical Conferences, Las
Vegas, USA, 1999.
[18] A. Barrientos, L.F. Peñı́n, C. Balaguer y R. Aracil, Fundamentos de
Robótica. 2a. Edición, Ed. McGraw Hill, 2007.
[19] J.E. Bravo, A.J. Botero y M. Botero, “El método de Newton-Raphson
- La alternativa del ingeniero para resolver sistemas de ecuaciones no
lineales ” Scientia et Technica, vol. 11, no. 27, pp. 221-224, 2005.
[1] EUROP: European Robotics Technology Platform, “The Strategic Research Agenda for Robotics in Europe”, 2009. Disponible online:
http://www.robotics-platform.eu
[2] Computing Community Consortium, “A Roadmap for US Robotics”,
2009. Disponible online: http://www.us-robotics.us
[3] Comité Español de Automática (CEA-GTRob), “Libro Blanco de la
Robótica, 2007.
[4] P.I. Corke, Robotics Toolbox for Matlab, 2008. Disponible online:
http://petercorke.com
[5] Proyecto
AutomatL@bs,
2010.
Página
Web:
http://lab.dia.uned.es/automatlab
[6] G.A. Demetriou y A.H. Lambert, “Virtual Environments for Robotics
Education” ” IEEE Robotics and Automation Magazine, vol. 12, no. 4,
pp. 75-91, 2005.
[7] J.L. Guzmán, M. Berenguel, F. Rodrı́guez y S. Dormido, “An interactive
tool for mobile robot motion planning ” Robotics and Autonomous
Systems, vol. 56, no. 5, pp. 396-409, 2008.
[8] L. Greenwald y J. Kopena, “Mobile Robot Labs ” IEEE Robotics and
Automation Magazine, vol. 10, no. 2, pp. 25-32, 2003.
[9] J.M. Cañas, V. Matellán y R. Montúfar, “Programación de robots móviles
” RIAI: Revista Inberoamericana de Automática e Informática Industrial,
vol. 3, no. 2, pp. 99-110, 2006.
[10] Lego
Mindstorms
NXT,
2010.
Disponible
online:
http://mindstorms.lego.com
Fig. 9. Trayectoria espiral
[20] G.W. Johnson, LabVIEW graphical programming, Ed. McGraw Hill,
2006.
[21] The MathWorks Inc., Using Matlab. The language of technical computing, 2002.