Proyecto Integrado - Tema 1: Cinemática
Fı́sica
u
Actividad para el dı́a 27 Octubre 2011:
Dentro de las actividades de la asignatura de Fı́sica para el Proyecto Integrado realizaremos los siguientes ejercicio correspondientes al tema de cinemática. El tema del
movimiento de un robot articulado el bastante complejo, por lo que en este primer curso
no vamos a estudiarlo en profundidad, aplicaremos las ecuaciones de distintos tipos de
movimiento al brazo de un robot con uno o mas eslabones.
Estos problemas deben realizarse por grupos del Proyecto Integrado, se deben entregar
poniendo el nombre de todos los integrantes de cada grupo. Los alumnos que no tengan
que hacer el proyecto pueden entregar los problemas de manera individual. Esta actividad
se tendrá en cuenta para la evaluación del Proyecto. Si teneis alguna duda sobre el
enunciado del problema podeis consultar por correo electrónico.
Antes de empezar, teneis que hacer como parte inicial del trabajo, una pequea búsqueda (internet o biblioteca) de los problemas cinemáticos relacionados con un
robot industrial y leer un poco al respecto para estar relacionados con la complejidad del
problema.
Problemas
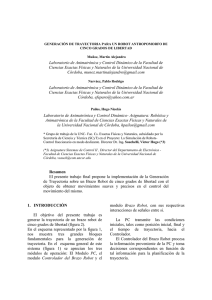
Considerar un robot formado por dos eslabones como el de la figura:
Curso: 2011/12
FLORIDA Universitaria
1
Proyecto Integrado - Tema 1: Cinemática
Fı́sica
u
Cada eslabón mide 40cm, considerar que la articulación está justo en el
extremo del brazo. Los brazos sólo giran en vertical, el primero un ángulo
θ1 y el segundo un ángulo θ2 respecto del primero.
Supongamos que inicialmente los dos brazos están en posición horizontal. Calcular:
1. Las coordenadas del extremo de cada brazo cuando el primer brazo ha
girado 45 grados y el segundo 30 grados hacia arriba, es decir, θ1 = 450
y θ2 = 300 . Resolverlo estudiando los ángulos y mediante relaciones
trigonométricas.
2. Lo mismo pero si ahora el segundo brazo gira hacia abajo, decir, θ1 =
450 y θ2 = −300 .
3. Supongamos que el movimiento de los eslabones es uniforme (velocidad angular constante), si primero gira el primer brazo los 450 con
velocidad angular de 0.40 rad/s y luego gira el segundo a razón de 0.25
rad/s, calcular el tiempo que tarda el robot en alcanzar su posición
final (θ1 = 450 y θ2 = 300 ) y calcular la velocidad lineal (m/s) del
extremo del segundo brazo durante toda la operación.
4. En una situación más realista, el brazo parte del reposo y luego debe
detenerse, por lo que antes y después del movimiento uniforme debe
haber un movimiento acelerado. Supongamos que el tiempo que necesita el primer brazo para pasar del reposo a la velocidad angular constante (es decir, el tiempo que dura la aceleración que supondremos
que es constante) es de 0.2 segundos. Calcular el valor de la aceleración. Si el segundo brazo, también tarda 0.2 segundos en acelerar,
calcular la aceleración en este segundo caso.
Curso: 2011/12
FLORIDA Universitaria
2
 0
0