- Ninguna Categoria
UNIVERSIDAD VERACRUZANA
Anuncio
UNIVERSIDAD VERACRUZANA FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA “CONTROL ELECTROHIDRÁULICO POR MEDIO DE PLC” TRABAJO PRÁCTICO TÉCNICO Que para obtener el título de: INGENIERO MECÁNICO ELECTRICISTA PRESENTA: ROSA MARÍA RODRÍGUEZ MÉNDEZ DIRECTOR: MTRO. SIMÓN LEAL ORTIZ XALAPA, VER. MAYO 2013 1 AGRADECIMIENTOS A mi madre: Ángela Rodríguez Méndez Por brindarme su apoyo incondicional, su amor, sus consejos y confianza en cada momento. Por enseñarme día a día que todo es posible con esfuerzo y dedicación, también por inculcarme buenos valores y darme la oportunidad de concluir mis estudios profesionales. A mi tía: Matilde Reyna Rodríguez Méndez Le agradezco sus consejos y porque siempre me ha escuchado. Por hacerme regresar al camino correcto cuando me estaba equivocando y contar con su apoyo en todo momento. A mi abuelito adoptivo: Pedro Hernández López Le doy gracias por apoyarme a lo largo de mi formación académica, a pesar de no ser miembro de la familia, me ha tratado como una nieta y ha estado conmigo en todo momento. A mis amigas y amigos: Gracias por apoyarme todo el tiempo, por compartir momentos buenos y malos que he vivido. Pero sobretodo, por brindarme su valiosa amistad ya que cada uno tiene un lugar muy especial en mi vida y saben que los quiero como hermanos. A mis profesores: Gracias a todos por su gran labor al enseñarme todos los conocimientos que he adquirido en mi formación académica. En especial le agradezco al Ing. Simón Leal y la Mtra. Gabriela Valencia por su apoyo y consejos. 2 ÍNDICE INTRODUCCIÓN ........................................................................................................................................ 7 CAPITULO 1 PRINCIPIOS DE HIDRAÚLICA 1.1 TÉCNICA DE FLUIDOS ..................................................................................................................... 9 1.1.1 NEUMÁTICA ..................................................................................................................................... 9 1.1.2 HIDRÁULICA .................................................................................................................................. 10 1.1.3 VENTAJAS Y DESVENTAJAS DE LA HIDRÁULICA FRENTE A LA NEUMÁTICA ........ 11 1.2 HIDROMECÁNICA ............................................................................................................................ 15 1.2.1 HIDROSTÁTICA ............................................................................................................................. 15 1.2.1.1 EFECTO PRODUCIDO POR UNA PRESIÓN EXTERNA ................................................... 16 1.2.1.2 TRANSMISIÓN DE FUERZA .................................................................................................... 17 1.2.1.3 TRANSMISIÓN DE PRESIÓN .................................................................................................. 19 1.2.2 HIDROCINÉTICA ........................................................................................................................... 19 1.2.2.1 LEY DE FLUJO ........................................................................................................................... 19 1.2.2.2 FRICCIÓN Y PÉRDIDA DE PRESIÓN .................................................................................... 21 1.3 VELOCIDADES DEL FLUIDO EN CIRCUITOS ........................................................................... 22 1.4 TÉCNICA DEL ACEITE COMPRIMIDO ........................................................................................ 24 1.4.1 PUNTOS A DESTACAR EN UN ACEITE HIDRÁULICO ........................................................ 26 1.5 FLUIDOS HIDRÁULICOS RESISTENTES AL FUEGO ............................................................. 29 1.5.1 FLUIDOS SINTÉTICOS ................................................................................................................ 29 1.5.2 DE BASE ACUOSA ....................................................................................................................... 30 1.6 ADITIVOS ........................................................................................................................................... 31 CAPITULO 2 COMPONENTES HIDRAÚLICOS 2.1 DEPÓSITO DE ACEITE ................................................................................................................... 33 2.1.1 CARACTERÍSTICAS CONSTRUCTIVAS DE LOS DEPÓSITOS ......................................... 34 3 2.2 FILTROS ............................................................................................................................................. 37 2.2.1 FILTROS DE ASPIRACIÓN ......................................................................................................... 38 2.2.2 FILTROS DE PRESIÓN ................................................................................................................ 39 2.2.3 FILTROS DE RETORNO .............................................................................................................. 39 2.2.4 FILTROS DE AIRE Y LLENADO ................................................................................................ 40 2.3 APARATOS DE CONTROL ............................................................................................................ 41 2.4 BOMBAS HIDRÁULICAS ................................................................................................................ 42 2.4.1 BOMBAS DE ENGRANAJE CON DENTADO EXTERIOR .................................................... 43 2.4.2 BOMBA DE ENGRANAJES CON DENTADO INTERIOR ..................................................... 44 2.4.3 BOMBA DE PALETAS DE CAUDAL FIJO ............................................................................... 45 2.4.4 BOMBA DE PALETAS DE CAUDAL VARIABLE ................................................................... 46 2.4.5 BOMBAS DE PISTONES ............................................................................................................. 48 2.4.5.1 BOMBA DE PISTONES RADIALES DE CAUDAL FIJO..................................................... 48 2.4.5.2 BOMBAS DE PISTONES AXIALES DE CAUDAL FIJO ..................................................... 50 2.4.5.3 BOMBAS DE PISTONES AXIALES DE CAUDAL VARIABLE ......................................... 52 2.5 MOTORES HIDRÁULICOS ............................................................................................................. 54 2.5.1 MOTORES DE ENGRANAJE ...................................................................................................... 56 2.5.2 MOTORES DE PALETAS ............................................................................................................ 58 2.5.3 MOTORES DE PISTONES AXIALES ........................................................................................ 59 2.5.4 MOTORES DE PISTONES RADIALES ..................................................................................... 60 2.6 VÁLVULAS ANTIRRETORNO ....................................................................................................... 62 2.7 VÁLVULAS REGULADORAS DE PRESIÓN ............................................................................... 64 2.7.1 VÁLVULAS LIMITADORAS DE PRESIÓN ............................................................................... 64 2.7.2 VÁLVULA DE DESCARGA EN VACÍO ..................................................................................... 67 2.7.3 VÁLVULAS REDUCTORAS DE PRESIÓN Y DE SECUENCIA ........................................... 68 2.8 VÁLVULAS REGULADORAS DE CAUDAL ................................................................................ 70 2.9 ELECTROVÁLVULAS ...................................................................................................................... 72 2.10 CILINDROS ...................................................................................................................................... 74 2.10.1TIPOS DE CILINDROS ................................................................................................................ 75 2.10.1.1 CILINDROS DE SIMPLE EFECTO........................................................................................ 75 2.10.1.2 CILINDROS DE DOBLE EFECTO ........................................................................................ 75 4 CAPITULO 3 EL PLC 3.1 AUTOMATIZACIÓN .......................................................................................................................... 80 3.2 DESCRIPCIÓN DEL PLC ................................................................................................................ 81 3.2.1 FEC COMPACTO........................................................................................................................... 82 3.2.2 FEC STANDARD ........................................................................................................................... 83 3.3 ARQUITECTURA INTERNA DEL PLC ......................................................................................... 84 3.3.1 FUENTE DE ALIMENTACIÓN ..................................................................................................... 85 3.3.2 CPU .................................................................................................................................................. 86 3.3.3 MEMORIAS ..................................................................................................................................... 88 3.3.4 INTERFASES DE ENTRADA Y SALIDA ................................................................................... 89 3.4 SENSORES ........................................................................................................................................ 90 3.4 1 SENSORES DE POSICIÓN ......................................................................................................... 91 3.4.1.1 SENSORES DE PROXIMIDAD ................................................................................................ 91 3.4.1.1.1 SENSORES INDUCTIVOS .................................................................................................... 92 3.4.1.1.2 SENSORES CAPACITIVOS .................................................................................................. 93 3.4.1.1.3 SENSORES ÓPTICOS ........................................................................................................... 94 3.5 OPERANDOS DEL PLC .................................................................................................................. 95 3.5.1 ENTRADAS ..................................................................................................................................... 95 3.5.2 SALIDAS ......................................................................................................................................... 96 3.5.3 BANDERAS .................................................................................................................................... 97 3.5.4 TEMPORIZADORES ..................................................................................................................... 98 3.5.4.1 TEMPORIZADORES DE IMPULSO ........................................................................................ 98 3.5.4.2 TEMPORIZADOR DE RETRAZO A LA CONEXIÓN ........................................................... 99 3.5.4.3 TEMPORIZADOR DE RETRAZO A LA DESCONEXIÓN ................................................. 100 3.5.5 CONTADORES............................................................................................................................. 101 3.5.6 FUNCIONES LÓGICAS .............................................................................................................. 102 3.5.6.1 FUNCIÓN NOT .......................................................................................................................... 102 3.5.6.2 FUNCIÓN OR ............................................................................................................................ 103 3.5.6.3 FUNCIÓN AND .......................................................................................................................... 103 3.5.6.4 FUNCIÓN OR EXCLUSIVA .................................................................................................... 104 5 3.5.7 BOBINAS ...................................................................................................................................... 104 3.5.7.1 SET .............................................................................................................................................. 104 3.5.7.2 RESET ........................................................................................................................................ 105 3.5.7.3 ASIGNACIÓN ............................................................................................................................ 105 3.5.6.4 ASIGNACIÓN NEGADA .......................................................................................................... 106 3.5.7 PROGRAMAS............................................................................................................................... 106 3.6 PROGRAMACIÓN EN DIAGRAMA DE ESCALERA ............................................................... 107 3.6.1 CONCEPTO DE ESCALÓN ....................................................................................................... 107 3.6.2 PROCESO EN LOS ESCALONES ........................................................................................... 108 3.7 PROGRAMACIÓN EN LISTADO DE INSTRUCCIONES ........................................................ 109 3.7.1 ELEMENTOS DE STL ................................................................................................................. 109 3.7.1.1 STEP ........................................................................................................................................... 109 3.7.1.2 FRASE ........................................................................................................................................ 110 3.7.2 COMANDOS UTILIZADOS EN STL ......................................................................................... 112 CAPITULO 4 PROGRAMACIÓN DEL PLC Y APLICACIÓN CON ELECTROHIDRAÚLICA 4.1 PASOS PARA PROGRAMAR EN Win FST .............................................................................. 114 PRACTICA Nº 1 ..................................................................................................................................... 122 PRACTICA Nº 2 ..................................................................................................................................... 126 PRACTICA Nº 3 ..................................................................................................................................... 130 PRACTICA Nº 4 ..................................................................................................................................... 134 CONCLUSIONES ................................................................................................................................... 139 BIBLIOGRAFÍA ...................................................................................................................................... 140 6 INTRODUCCIÓN Hace algunos años el control de procesos industriales se hacía de forma cableada por medio de contactores y relevadores. Esto era un problema cuando se necesitaba modificar el proceso, ya que implicaba una gran complejidad en las conexiones y un mayor desembolso económico. En la actualidad, con la introducción de los controladores lógicos programables (PLC), se tiene una mejor solución para el control de circuitos complejos de automatización. Por lo tanto, se puede decir que un controlador es un dispositivo electrónico que sustituye los circuitos auxiliares o de mando de los sistemas automáticos convencionales. Además del PLC se necesitan elementos que llevarán a cabo el proceso, es decir, los que realizan el trabajo. Éstos pueden ser de dos tipos hidráulicos o neumáticos, se seleccionarán dependiendo del trabajo que se realizará. Por ello en el presente documento se tratarán éstos dos temas. En el capítulo uno se hará referencia a conceptos básicos de hidráulica así como las diferencias entre ésta y la neumática, además los principios necesarios para que los elementos de trabajo puedan funcionar correctamente. En el capítulo dos se explicará de forma general cada elemento hidráulico que se emplea en un proceso, como funciona, de que se compone y los tipos más comunes. En el capítulo tres se conocerá el PLC desde su estructura interna hasta las funciones y los métodos para programarlo. Por último en el capítulo cuatro se realizarán prácticas, en las que se aplica lo mencionado en los capítulos anteriores, es decir, se automatizarán los elementos hidráulicos mediante el PLC. 7 CAPÍTULO 1 PRINCIPIOS DE HIDRÁULICA 8 1.1 TÉCNICA DE FLUIDOS Varios autores hacen referencia al término oleohidráulico para citar a la técnica donde se utiliza aceite que coloquialmente se llama hidráulica, sin embargo este término es demasiado ambiguo. Siempre se han denominado dos técnicas: hidráulica y neumática, en este caso se tratará en específico la primera. Pero, recientemente estas denominaciones fueron corregidas, pasándose a llamar desde entonces técnica de fluidos. Debe considerarse que: en las instalaciones en donde se aplique la técnica de fluidos se utilizan las características propias de transmisión de energía en forma de presión, es decir, la capacidad de los fluidos de transportar presión de un punto a otro. Esto no solamente es válido para el sector hidráulico de la técnica de fluidos, sino también para el sector neumático. Entre los fluidos se encuentran los líquidos, vapores y gases; el aire también es un fluido aunque compuesto por una mezcla de gases. Dado que la técnica de fluidos se basa en las características mecánicas de los fluidos, si utilizamos líquidos en nuestro sistema la debemos denominar hidráulica, si utilizamos el aire deberá llamarse neumática; a continuación se presentarán las definiciones de ambas técnicas. 1.1.1 NEUMÁTICA Es la tecnología que emplea el aire comprimido como modo de transmisión de la energía necesaria para mover y hacer funcionar mecanismos. El aire es un material elástico y por tanto, al aplicarle una fuerza, se comprime, mantiene esta compresión y devolverá la energía acumulada cuando se le permita expandirse, según la ley de los gases ideales. 9 Los sistemas neumáticos se complementan con los eléctricos y electrónicos lo que les permite obtener un alto grado de sofisticación y flexibilidad. 1.1.2 HIDRÁULICA La hidráulica es la parte de la física que estudia la mecánica de los fluidos; su estudio es importante ya que nos posibilita analizar las leyes que rigen el movimiento y las técnicas para el mejor aprovechamiento de los líquidos. La hidráulica utiliza básicamente los fluidos hidráulicos como medios de presión para mover los pistones de los cilindros. Los sistemas hidráulicos se aplican típicamente en dispositivos móviles tales como: maquinaria de construcción, excavadoras, plataformas elevadoras, aparatos de elevación y transporte, etc. Mientras en dispositivos fijos abarcan fabricación y montaje de máquinas de todo tipo, prensas, ascensores, montacargas, etc. En determinadas aplicaciones, tales como en movimientos de aproximación rápido y avance lento, como la automatización de procesos de producción, se combinan los sistemas neumático, hidráulico y eléctrico en la forma siguiente: Circuito electroneumático: accionamiento eléctrico - actuador neumático. Circuito oleoneumático: accionamiento neumático.-.actuador hidráulico. Circuito electrohidráulico: accionamiento eléctrico.-.actuador hidráulico. 10 1.1.3 VENTAJAS Y DESVENTAJAS DE LA HIDRÁULICA FRENTE A LA NEUMÁTICA La hidráulica y la neumática son formas de transmisión de energía similares. Ambas emplean tuberías para el transporte del fluido: aceite en el primer caso y aire en el segundo. En los dos casos se eleva el fluido a una determinada presión para producir un trabajo, aunque las presiones en hidráulica son bastante más elevadas que en neumática. Los componentes empleados en una y otra forma de transmisión son también muy parecidos y sólo diferenciados en la mayor robustez de los componentes hidráulicos. Pero no solamente llega hasta ahí la semejanza, sino que en la mayor parte de los casos, se emplean los mismos símbolos normalizados para diseñar circuitos. Cada una de estas formas de transmisión de energía posee su propio campo de aplicación, aunque de forma alternativa y en algunos casos puede ser empleada cualquiera de ellas. Las ventajas más apreciables de la hidráulica frente a la neumática, pueden ser: Presiones de trabajo que pueden alcanzar hasta los 600 bars aproximadamente. Con aire comprimido, y de modo general, no se superan los 6 o, a lo sumo, 8 bars. Fuerza casi ilimitada, dependiente sólo del tamaño del actuador. El aceite es prácticamente incompresible para un buen número de aplicaciones. Regulación más precisa y sencilla de la velocidad de los actuadores. En neumática la regulación del flujo de aire es más complicada ya que cuando 11 es necesaria cierta precisión en los movimientos es necesario acudir a sistemas hidráulicos auxiliares. Los equipos hidráulicos son autónomos, o lo que es lo mismo, la energía se genera en la propia máquina. En neumática se depende siempre de una red general de distribución de aire comprimido que abastece un solo compresor general. Los sistemas hidráulicos son más silenciosos. El coste de la energía es menor. Frente a todas estas ventajas y pensando en la posibilidad de compatibilidad de ambos sistemas en determinados casos, es conveniente también conocer las desventajas que presentan los sistemas hidráulicos comparados con los neumáticos. Entre tales inconvenientes se destacan: Menor facilidad de implantación. La instalación de los equipos neumáticos es más sencilla, rápida y limpia. Los componentes neumáticos que conforman el circuito son más económicos. Los componentes hidráulicos son de mayor peso y volumen. Aquí es preciso excluir los elementos de trabajo como los cilindros y los actuadores de giro, ya que para igualdad de fuerza, son más voluminosos en neumática. Los movimientos son más lentos que en neumática. Menor elasticidad de este medio de transmisión. En determinados montajes donde sea precisa la característica, el aire comprimido ofrece ventajas debido a su compresibilidad. Ciertas pérdidas de fluido por tuberías o elementos de unión carecen de importancia en neumática. 12 En hidráulica cualquier grado de automatización requiere el uso de componentes eléctricos. En cambio, la neumática es autosuficiente hasta ciertos niveles de automatización, ya que no necesita en ocasiones de la asistencia de energía eléctrica. En determinados tipos de instalaciones con peligro de incendio o de explosión, es obligado el uso de la neumática ya que ésta es inflamable. No ocurre lo mismo con las instalaciones de aceite comprimido que son más sensibles a estos aparatosos efectos. 13 Neumática Hidráulica Efecto de fugas. Solo pérdida de energía. Contaminación. Influencia del ambiente. A prueba de explosión. Insensible a la temperatura. Riesgo de incendio en caso de fuga. Sensible a los cambios de temperatura. Almacenaje de energía. Fácil. Limitada. Transmisión de energía. Hasta 1 000 m. Caudal v= Hasta 1 000 m. Caudal 20-40 m/s. Velocidad de la v= 2 – 6 m/s. velocidad señal 20 – 40 m/s. de la señal hasta 1 0000 m/s. Velocidad de operación. V = 1.5 m/s. V = 0.5 m/s. Coste de alimentación. Muy alto. Alto. Movimiento lineal. Simple con cilindros. Fuerzas limitadas. Velocidad dependiente de la carga. Simple con cilindros. Fuerzas muy grandes. Buen control de velocidad. Movimiento giratorio. Simple, ineficiente, alta velocidad. Simple, par alto, baja velocidad. Exactitud de posición. 1/10 mm posible sin carga. Puede conseguirse 1mm. Estabilidad. Baja, el aire es compresible. Alta, ya que el aceite es casi incompresible, además el nivel de presión es más alto que en el neumático. Fuerzas. Protegido contra sobrecargas. Fuerzas limitadas por la presión neumática y el diámetro del cilindros (F= 30 kN a 6 bars). Protegido contra sobrecargas, con presiones que alcanzan los 600 bars y pueden generarse grandes fuerzas hasta 3 000 kN. Tabla 1.1 Diferencias entre neumática e hidráulica. 14 1.2 HIDROMECÁNICA Es la teoría que trata de las propiedades físicas y de la conducta de los líquidos. La principal diferencia de los líquidos respecto a los cuerpos sólidos es que, en los líquidos, sus partículas se pueden mover libremente. Los líquidos, a diferencia de los gases, son muy poco compresibles, prácticamente nada. Los gases, por el contrario, son muy compresibles. Por esto los gases siempre llenan el recipiente que los contiene. Se aprovechan las leyes de la hidromecánica para la transmisión de energía siempre en forma de presión. Aunque simplemente se trate de señales o pulsos, éstas siempre son en forma de presión, y se utilizan, necesariamente, las leyes de la hidrostática e hidrocinética. 1.2.1 HIDROSTÁTICA La presión hidrostática es un fenómeno físico que actúa en forma de presión sobre cada una de las partículas de un fluido; en el líquido contenido en un recipiente abierto, la presión que sufrirá cada una de las partículas dependerá de la altura en que se encuentre y del nivel del líquido que el recipiente contiene. Se debe observar que en la estática se produce siempre un equilibrio de fuerzas, lo que también sucede y es válido para la hidrostática. Si medimos la presión, tanto en la base del recipiente, como en cualquier altura del mismo, siempre que sea por debajo del nivel del líquido, los distintos valores de presión medidos en esos puntos no significan ningún cambio en las condiciones existentes. Veamos en un ejemplo, el trabajo de la hidráulica respecto a un cilindro hidráulico. 15 Si el cilindro hidráulico, estando bajo presión, se mantiene en reposo, por ejemplo: en sistemas de fijación o sujeción, podemos decir que existe equilibrio de fuerzas, y el efecto se puede denominar hidrostático. Sin embargo, si la parte móvil o émbolo en el cilindro hidráulico se mueve como consecuencia de la presión generada por la entrada continua de un caudal, entonces, no sólo actúa la presión que proviene de la energía potencial, sino también un efecto dinámico que proviene de la energía cinética. En los sistemas, en los cuales predominen las condiciones hidrostáticas, el trabajo está determinado, especialmente, por la transmisión de presión. En estas condiciones, las presiones son relativamente elevadas y, en cambio, las velocidades del flujo debe ser muy bajas, (lo suficiente para compensar fugas, que deberán ser mínimas), para reducir lo más posible los efectos de la hidrocinética. 1.2.1.1 EFECTO PRODUCIDO POR UNA PRESIÓN EXTERNA El principio de la hidrostática es la ley de Pascal: el efecto de una fuerza sobre un líquido en reposo se reparte por igual en todas direcciones del líquido, fig. 1.1. Fig. 1.1 Representación de la ley de Pascal. La magnitud de la presión en el líquido es igual a la fuerza ejercida en su superficie efectiva (A). La presión siempre actúa por igual, de forma perpendicular y en todas las direcciones, sobre las superficies que 16 delimitan el recipiente. Podemos decir, que la presión se reparte uniformemente por todos los puntos de los lados o paredes del envase que contiene el líquido. Presión: es la fuerza (F) que se ejerce, por unidad de área; se representa por la ecuación: También cuenta la presión de la fuerza de gravedad, pero debido a las elevadas presiones relativas con que hoy se trabaja en las instalaciones hidráulicas modernas, el valor de la presión por efecto de gravedad es despreciable, y no se tiene en cuenta. 1.2.1.2 TRANSMISIÓN DE FUERZA Puesto que la presión se reparte uniformemente en todas direcciones, la forma que tenga el recipiente carece de importancia. Fig. 1.2 Principio de transmisión de fuerza. En la fig. 1.2 es un clásico para demostrar la presión hidrostática; se trata de un simple gato hidráulico, a continuación se analizará. Cuando la fuerza presión actúa sobre la superficie La presión se genera en el fluido una se reparte en todas direcciones del líquido, por 17 lo tanto, también llegará a actuar sobre la superficie circunstancias, la fuerza que se creará será de: Si lo quiere de otra manera: . En estas o bien En un sistema de este tipo, la presión siempre estará relacionada con la fuerza y la superficie efectiva . Es decir, la presión seguirá aumentando, si se incrementa la fuerza, hasta que pueda llegar a superar la resistencia que se opone al movimiento del líquido. Si mediante la fuerza y en relación con la superficie fuese posible alcanzar la presión necesaria para superar la carga que supone , entonces, la resistencia que se opone al movimiento del líquido desaparece y la carga se moverá, en este caso, el de la fig. 1.2 se elevará. No será necesario, a partir de este momento, incrementar la fuerza ni tampoco aumentará más la presión. Se observa entonces que la presión siempre está relacionada con la carga; a más carga más presión, de forma directamente proporcional. Esto quiere decir que, si no hay carga, por mucha fuerza que se aplique no se generará presión alguna. No hay ventaja sin contrapartida. Para el dispositivo analizado se deberá tener en cuenta una relación importante, como son las carreras de ambos pistones o émbolos. La relación se puede expresar con el siguiente razonamiento: los trayectos recorridos por ambos pistones y son inversos a sus respectivas superficies (A), o bien con la siguiente ecuación: 18 1.2.1.3 TRANSMISIÓN DE PRESIÓN Fig. 1.3 Principio de transmisión de presión. En la fig. 1.3 podemos observar que mediante una barra rígida, se han unido dos émbolos de distinta área. Si sobre la superficie actúa una presión , en ese pistón obtendremos una fuerza . Esa fuerza obliga al pistón a desplazarse, éste a su vez, mediante la barra rígida, desplaza al pistón de área , generando, en la superficie de la presión . 1.2.2 HIDROCINÉTICA La hidrocinética estudia las leyes del movimiento de los líquidos, y de las fuerzas efectivas en cada caso. Si se desprecian las fuerzas de rozamiento, por ejemplo: entre las superficies de las piezas metálicas en movimiento, entre los líquidos y las superficies metálicas que los conducen y entre las capas de moléculas del propio líquido, entonces sería un flujo libre o ideal. 1.2.2.1 LEY DE FLUJO A través de un tubo, que a lo largo de su longitud, tiene distintas secciones transversales, fig. 1.4, fluye con volumen constante un fluido. Ocurre que la velocidad de flujo del fluido aumentará al pasar por la sección más estrecha. 19 Fig. 1.4 Tubería con una reducción. El caudal es el cociente del volumen del fluido y del tiempo : . El volumen de fluido que circula por una tubería también es igual al producto de la superficie por la longitud . En este caso la tubería tiene la misma área en toda su sección transversal a lo largo de su longitud total: Si en lugar de , se opera con El cociente del trayecto , entonces se obtiene . y del es la velocidad : Por lo tanto, el corresponde también al producto entre la superficie de la sección transversal del tubo y la velocidad del líquido . Fig. 1.5 Demostración de la variación de caudal en una tubería con distintos diámetros. El caudal en L/min es igual en todo tubo. Si el tubo tuviera las secciones transversales distintas, como en la fig. 1.5 y , en dichas secciones se registrará, una velocidad propia. . 20 Entonces: De aquí obtenemos la ecuación de la continuidad: 1.2.2.2 FRICCIÓN Y PÉRDIDA DE PRESIÓN Para considerar la regularidad de los líquidos fluyendo, se supuso que las capas de partículas del líquido se pueden desplazar libres de fricción entre sí y contra las paredes del conducto. Sin embargo, la energía hidráulica no se puede transmitir libre de pérdidas, se utilice el procedimiento de transmisión que sea, en este caso tuberías. Con las paredes del tubo y en el líquido mismo se producen fricciones que consumen energía. En realidad, la energía pérdida se convierte en otra forma de energía, el calor. La pérdida de energía hidráulica, significa pérdida de presión para el trabajo, de ahí la expresión pérdida de carga. La pérdida de presión se denomina . Cuanto mayor sea la viscosidad del líquido, será mayor el valor de la fricción entre las moléculas del líquido y con la pared del tubo. El valor de las pérdidas por fricción depende de: La longitud de la tubería. La sección transversal de las tuberías. La rugosidad de las paredes del tubo. La cantidad de accesorios. La velocidad del flujo. La viscosidad del líquido. 21 1.3 VELOCIDADES DEL FLUIDO EN CIRCUITOS En la fig. 1.6 se representa un circuito convencional esquemático y simplificado al máximo. En él pueden apreciarse los cuatro tipos de tuberías que conforman cualquier circuito: las de aspiración, las de presión, las de retorno y las que cumplen con doble función de presión y retorno. Fig. 1.6 Circuito simple hidráulico. Las tuberías de aspiración (1) son tuberías que discurren desde el interior del aceite del depósito hasta la entrada de la bomba. El extremo libre de la tubería debe encontrarse sumergido en el aceite con objeto de evitar la aspiración del aceite. El diámetro interior deberá ser generoso para que la velocidad del fluido sea lenta y no forzar la aspiración de la bomba. Por estas tuberías circula el aceite a la velocidad más lenta de todo el circuito. Puede apreciarse que en ellas el sentido del flujo es siempre el mismo ya que se dirige hacia la bomba. Son tuberías que en general no soportan presión. Los conductos de presión (2) son tuberías que van desde la salida de impulsión de la bomba hasta el correspondiente distribuidor del actuador, en este caso un cilindro. En estas tuberías la velocidad puede ser la más rápida y dependerá también de la presión de trabajo del circuito. 22 Al igual que en el caso anterior, el sentido del flujo es siempre el mismo y se dirige desde la bomba hasta el mencionado distribuidor. Estas tuberías se encuentran sometidas a la mayor presión que se produce en el circuito. Las tuberías de retorno (5) son tuberías por las que el aceite retorna desde el distribuidor mencionado hasta el depósito. En éstas, el fluido circula sin apenas presión. La velocidad debe ser más lenta que en los conductos de presión y el sentido del flujo es también constante y se dirige siempre desde el distribuidor hacia el depósito. Las tuberías de distribución hacia los actuadores (3) y (4) son tuberías que cumplen la doble función de tuberías de presión y de retorno, dependiendo del sentido del movimiento del vástago cuando el accionador es un cilindro, y del sentido de giro del eje, cuando tal es un motor hidráulico o un rotatorio. En el caso de la figura mencionada, donde el vástago del cilindro avanza, la tubería (3) se comporta como de presión y la (4) como tubería de retorno. Al invertir el movimiento del vástago, la (4) pasa a ser de presión y la (3) se convierte en tubería de retorno. En estas tuberías es necesario buscar un cierto equilibrio en lo que al dimensionado del diámetro interior se refiere. Se trata de dimensionarlas como tuberías de presión pero con cierta generosidad para que cumplan adecuadamente también la función como tuberías de retorno. Conductos De presión De alimentación De retorno VELOCIDADES DEL FLUIDO EN TUBERÍAS Velocidades del fluido en m/s Presiones de trabajo en bars De 0 a 25 De 25 a 100 De 100 a 300 De 3.0 a 3.5 De 3.5 a 4.5 De 4.5 a 6.0 De 0.5 a 1.0 De 1.5 a 2.0 Tabla 1.2 Velocidades recomendadas. 23 En la tabla 1.2 se resumen los valores recomendados de las velocidades de circulación del fluido para cada uno de los casos. Como puede observarse, en los conductos de presión se han aconsejado velocidades diferentes para distintas presiones, que oscilan desde 0 a 300 bars. En efecto, al aumentar la presión del circuito puede aumentarse también la velocidad de circulación del aceite hasta el valor de 6 m/s, e incluso más en determinadas aplicaciones. En cambio, en los conductos de alimentación y retorno, al no existir presión, apenas la velocidad puede mantenerse constante entre los valores aproximados que se muestran. 1.4 TÉCNICA DEL ACEITE COMPRIMIDO La hidráulica y la neumática constituyen hoy en día el complemento ideal de la mecánica tradicional en numerosos procesos industriales modernos. Durante años dichos procesos han sido resueltos mediante el empleo de la mecánica tradicional. A veces, el movimiento rotatorio de un motor eléctrico convencional se ha transformado en otro más lento, pero con mayor par de rotación, en un movimiento lineal continuo o discontinuo o en un movimiento combinado complejo en cualquier dirección. Los procedimientos mecánicos para estos desplazamientos y giros siguen empleándose todavía en muchos casos, ya que es insustituible en determinadas operaciones industriales, pero con la incorporación relativamente reciente de estas tecnologías se han conseguido simplificar mucho las máquinas y mecanismos, haciendo más sencillos los movimientos y permitiendo a la vez obtener de forma más sencilla cualquier nivel de automatización. De entre las ventajas que ofrecen los medios de transmisión hidráulicos frente a soluciones mecánicas, pueden destacarse las siguientes: 24 Movimientos suaves, silenciosos y libres de vibraciones. Posibilidad de invertir fácilmente el sentido de la marcha. Regulación sencilla de las velocidades de trabajo. Control simple de las fuerzas y pares en los cilindros y en los actuadores de giro. Posibilidad de conseguir arranques y paradas progresivas en los movimientos. Fácil protección contra las sobrecargas. Autoengrase de todos los componentes. Pero ya que se han enumerado algunas ventajas es justo también relacionar algunos de los inconvenientes que se presentan frente a las transmisiones mecánicas: Para generar la presión y el caudal necesario es preciso disponer de una centralita hidráulica dotada de un motor convencional y de bomba, además de otros componentes auxiliares. Al poseer la transmisión cierta elasticidad pueden presentarse problemas en algunos mecanismos. La compresibilidad, aunque pequeña del aceite, unida a la elasticidad de las tuberías pueden ocasionar anomalías en el funcionamiento en algunas aplicaciones. Sobre todo en la puesta en marcha de los sistemas que funcionan con este medio, es preciso una purga previa de las burbujas de aire que contienen tuberías y aparatos diversos. Se originan a veces ciertas pérdidas de fluido por los aparatos y por los racores de unión de las tuberías. Mediante esta forma de transmisión de energía, de una forma directa y sin intervención de mecanismos intermedios, pueden conseguirse movimientos lineales a través de los cilindros, movimientos rotatorios a través de los motores o accionados rotativos hidráulicos y movimientos de sujeción a través de las denominadas pinzas. 25 Según sean de simple o doble efecto puede hacerse que los vástagos de los cilindros, los ejes de los actuadores rotativos o las garras de amarre de las pinzas puedan desplazarse en un solo sentido o en los dos. 1.4.1 PUNTOS A DESTACAR EN UN ACEITE HIDRÁULICO Viscosidad: la viscosidad es una propiedad (que se pone de manifiesto cuando el líquido esta en movimiento) de las sustancias fluidas definiéndola como la resistencia que ofrecen las moléculas que configuran el fluido (aceite) al deslizarse unas sobre otras, siendo esta la cualidad más importante de un aceite. La viscosidad es una magnitud física que mide la resistencia interna al fluir el líquido. Cuanto mayor es la viscosidad de un aceite, significa que mayor es también la resistencia que ese aceite presenta al fluir. De la acertada elección de la viscosidad del aceite hidráulico depende: El rendimiento de la instalación. Las pérdidas de carga, que son proporcionales a la viscosidad. La duración de los órganos, que en muchos casos llevan ajustes estrictos. Si la viscosidad es demasiado alta, aumenta la fricción; y en caso de que la viscosidad fuera demasiado baja aumenta las fugas internas, puede disminuir la eficiencia de la bomba y al existir pérdidas por fugas aumenta la temperatura. Compresibilidad: en el caso del aceite mineral, un volumen de 100 litros de fluido a la temperatura de 20°C y sometido a una presión de 100 bars experimenta una disminución de volumen de unos 99,3 litros, o sea, disminuye 0,7 litros. 26 Este fenómeno puede no tenerse en cuenta en instalaciones de poco volumen y que funcionen a baja presión, pero habrá que tener en mente cuando existan cilindros de gran capacidad, tuberías de cierta longitud y de gran diámetro, porque puede dar lugar, a un retraso en las puesta a presión, que repercute sobre la duración total del ciclo. Punto de fluidez: el punto de fluidez es la temperatura más baja a la que puede fluir un líquido. Ésta es una especificación muy valiosa en los casos en que el sistema hidráulico va a sufrir el riesgo de temperaturas sumamente altas. Poder antiespumante: si por cualquier causa o motivo el aire u otro gas se mezclan con el aceite y se produce espuma el funcionamiento de la instalación se vuelve muy deficiente y escandalosa. La formación de espuma depende de la dispersión del aire en el aceite. Un buen aceite para instalaciones hidráulicas contiene siempre aditivos que dificultan la absorción de gases y facilitan la separación del aire que haya penetrado circunstancialmente en el aceite. También un buen purgado reduce la espuma. Poder antiemulsivo: es la capacidad que posee el aceite para mantener el agua separada del mismo. En la mayoría de los sistemas se pueden tolerar pequeñas cantidades de agua. De hecho, ciertos compuestos antioxidantes favorecen cierto grado de emulsión. Si existe mucha agua en el aceite, se fomentará la acumulación de contaminantes que pueden originar una aceleración en el desgaste. Resistencia al envejecimiento: la acción del oxígeno del aire, oxidación o unión química con el oxígeno, reduce gravemente la duración en servicio de un fluido. Los aceites derivados del petróleo son particularmente susceptibles a la oxidación, ya que el oxígeno se combina fácilmente, tanto con el carbono 27 como con el hidrógeno, que son los elementos de que están constituido el aceite. El envejecimiento queda además favorecido por la presencia en la instalación de ciertos metales como el plomo, el latón o el cobre, en partículas de metal que se disuelven y son arrastradas. Tanto la oxidación como la corrosión contaminan el sistema y favorecen el desgaste. El envejecimiento, que llega mediante la oxidación y la corrosión, puede combatirse incorporando aditivos que se depositen en forma de película sobre las superficies metálicas, para evitar que sean atacadas químicamente. Punto de congelación: el punto de congelación debe asociarse a la viscosidad en frío y corresponde aquella temperatura a la cual un líquido deja de fluir libremente. Punto de anilina: es un dato muy importante, ya que tiene un poder disolvente que hincha o endurece las juntas y las guarniciones interiores de las tuberías flexibles. El punto de anilina señala la temperatura más baja a que puede mezclarse el aceite y la anilina a partes iguales, de una forma homogénea y transparente. Punto de inflamación: temperatura a la cual surge una llamarada repentina sobre la superficie del aceite cuando se aproxima allí una flama o se hace saltar una chispa. No importa que la flama se apague inmediatamente después. Si se mantuviera, ya no estaríamos ante el punto de inflamación, si no ante el punto de combustión. Untuosidad: es la propiedad de los aceites que caracteriza el poder de cada uno de ellos de adherirse a las superficies metálicas necesitadas de lubricación. 28 1.5 FLUIDOS HIDRÁULICOS RESISTENTES AL FUEGO La mayoría de los sistemas hidráulicos actuales consumen fluidos a base de aceites de petróleo como agente de transmisión. Una de las principales desventajas del aceite de petróleo es que es combustible y por ello en ciertas aplicaciones en las que se pueda haber riesgo de incendio se prefiera renunciar a parte de las ventajas que proporciona el aceite y usar en su lugar fluidos especiales, poco inflamables. A esta única ventaja fundamental de los fluidos resistentes al fuego tienen, en su contra, inconvenientes y desventajas, tanto técnicas como económicas. Se procura por ello recurrir a su empleo solamente cuando puede haber riesgo de incendio y éste es bastante grave, por ejemplo en el forjado a presión, tratamientos térmicos, soldadura hidroeléctrica o a causa de la cercanía de focos de calor de alta temperatura. 1.5.1 FLUIDOS SINTÉTICOS La resistencia al fuego de estos fluidos radica en que son productos químicos sintetizados en laboratorio. Los más usados hasta ahora son los esteres fosfatados que admiten temperaturas de servicio hasta 150°C ampliamente superiores a las necesarias, ya que al no contener ni agua ni ninguna otra materia volátil funcionan bien a temperaturas altas sin perder ninguno de sus elementos esenciales. El poder lubricante se mejora con la adición de aceite mineral, la cual, de todos modos, no debe superar el 5%. El poder antioxidante resulta satisfactorio, pero no puede decirse lo mismo del comportamiento de la viscosidad es generalmente bajo. Son adecuados para sistemas de alta presión, no siendo los que mejor funcionan en sistemas de alta presión, ni los que mejor funcionan en sistemas de baja temperatura. En ambientes fríos puede ser necesario un calentamiento auxiliar. Únicamente se deben usar en aquellos casos en que la temperatura de operación es relativamente constante. 29 Los esteres fosfatados tienen una temperatura de trabajo que oscila entre 55°C y +150°C. Las siliconas tienen una temperatura de trabajo que varía entre -70°C y +300°C. 1.5.2 DE BASE ACUOSA La resistencia a la inflamación se debe simplemente a la presencia de agua, en caso de incendio genera vapor e impide así la afluencia de oxígeno a la zona de ignición, por lo menos hasta la total vaporación de aquella. Cabe señalar a 3 familias: Soluciones de agua –glicol. Emulsiones de agua en aceite mineral. Emulsiones de aceite mineral en agua. Las soluciones de agua y glicol están compuestas de: 35 a 40% de agua que proporciona resistencia a la combustión. Temperatura de trabajo entre -15°C y +60°C. Un glicol (sustancia química sintética de la misma familia que los anticongelantes permanentes, como el etileno u otros glicoles). Y un espesador soluble en agua para mejorar la viscosidad. Contiene también aditivos que evitan la formación de espuma, oxidación y corrosión. Las emulsiones de agua en aceite mineral contienen de 50 a 60% en volumen de aceite y el resto es agua. Su poder lubricante es elevado, si bien inferior al del aceite puro. La temperatura de trabajo oscila entre +10°C y +70°C. 30 Las emulsiones de aceite mineral en agua, el porcentaje de aceite oscila entre el 1 y el 15%, sirve para mejorar el poder lubricante y, conjuntamente con otros aditivos, el poder antioxidante. Temperatura de trabajo entre +10°C y +70°C. 1.6 ADITIVOS Para mejorar, conservar y dar propiedades especiales a los líquidos hidráulicos, se les añade aditivos, que pueden clasificarse en dos grandes grupos. Por un lado está los mejoradores de las cualidades básicas, tales como los mejoradores del índice de viscosidad, de la untuosidad, depresores del punto de congelación, etc. Y por otro lado están los aditivos inhibidores, entre los que cabe encuadrar los antioxidantes y anticorrosivos, retardando la propia degradación del aceite. El uso de aditivos debe de tomarse con prudencia y conocimiento. Es tal la complejidad de la fórmula definitiva, no sólo por el crudo de procedencia, sino también y sobre todo por los aditivos, puesto que la mayor parte de las propiedades deseables en un fluido se pueden atribuir, cuando menos a los aditivos, lo cual podría suponer que resulta posible incorporar aditivos comerciales a cualquier aceite, a fin de hacerlo más apropiado para un sistema hidráulico. Sin embargo, se comprende fácilmente el peligro que entraña mezclar aceite distinto o añadir aditivos indiscriminadamente, pues los aditivos, deben ser compatibles con el fluido base y entre sí, pues las reacciones químicas que pueden tener lugar entre los aditivos de uno y otro, si se mezclan aceites, pueden conducir a resultados imprevisibles. Será de buena lógica dejar que el fabricante de fluido aconseje sobre el uso de aditivos. 31 CAPÍTULO 2 COMPONENTES HIDRÁULICOS 32 2.1 DEPÓSITO DE ACEITE El depósito forma parte de cualquier dispositivo hidráulico, y debe ser proyectado no sólo para almacenar el fluido, también para realizar las siguientes funciones: Refrigeración del aceite. Separación de las partículas contaminantes. Separación del aire y agua contenidos en el fluido. El depósito se dimensiona de forma que permita al fluido permanecer en su interior un tiempo suficiente para sufrir los tratamientos antes indicados. Tal duración depende evidentemente de las situaciones operativas y ambientales, debiendo de considerar las variaciones del volumen que se presentan por los diferentes consumos durante el ciclo de trabajo y reponer las fugas al exterior. En las aplicaciones normales, el tamaño del depósito en función del caudal de la bomba situándose cerca de 3 a 4 veces el caudal de la misma. O bien, debe alojar como mínimo un 30% más de lo que cabe en el circuito. Es preciso verificar cualquier condición que se pueda originar en el circuito, esté presente en el depósito un volumen mínimo de fluido, para no cubrir la aspiración de la bomba. En todo caso, es preciso prever un cojín de aire igual al 10-15% del volumen, para compensar la dilatación térmica del aceite y permitir la acumulación de una cierta cantidad de agua y de contaminantes. En el depósito el fluido debe separar el aire introducido y el agua, que por cualquier causa hayan entrado en el circuito. La separación de las otras sustancias contaminantes no es tan importante, ya que puede ser realizada de forma más completa y segura mediante la utilización de filtros. 33 El aire es apartado siempre en la superficie, mientras que el agua se recoge en la superficie o en el fondo según su peso específico sea inferior superior al fluido. Si se emplea aceite mineral, el agua debe ser periódicamente purgada de la descarga del fondo del depósito; si se emplean fluidos sintéticos no acuosos, el agua debe ser desalojada mediante un grifo colocado a una oportuna altura en el depósito. 2.1.1 CARACTERÍSTICAS CONSTRUCTIVAS DE LOS DEPÓSITOS Los pequeños depósitos son construidos en aleación ligera, con nervaduras o aletas para favorecer el enfriamiento. Los depósitos de dimensiones superiores son realizados, por lo general, en ejecución soldada utilizando plancha laminada en caliente de buena calidad exenta de oxidaciones, pulida y decapada. Fig. 2.7 Vista interior de un depósito. 34 Hay que prestar atención a los siguientes puntos: El depósito debe ser inspeccionable en todos sus puntos internos, por medio de dos puertas de inspección laterales. Una de las puertas lleva una boquilla de carga, provista de malla metálica fina para retener los eventuales cuerpos extraños presentes en el fluido. El depósito comunica con el exterior por medio de un conducto con filtro de aire incorporado o respirador. En los circuitos en los cuales la diferencia entre caudal suministrado y el que resta, puede ser momentáneamente elevado, el conducto de aire es independiente y de dimensiones adecuadas, para impedir sobrepresiones respecto a la atmosférica. El depósito está dividido longitudinalmente por un sector separador en plancha, de altura igual aproximadamente, 2/3 del nivel normal del fluido, su función es la de separar la zona de aspiración de la bomba de la de retorno del fluido. De tal forma que se impide caliente retornado de la utilización sea súbitamente vuelto a aspirar por la bomba, con la creación de una especie de “cortocircuito” en el interior del depósito, sin poderse enfriar o decantar posibles sustancias contaminantes. Las tuberías de retorno y de aspiración situadas cada una de ellas en la parte opuesta respecto al sector separador, deben tener las conexiones estancas, de forma que impida la entrada de sustancias contaminantes, y al mismo tiempo deben permitir un desmontaje fácil de los posibles filtros. 35 Las tuberías de aspiración y de retorno, deben terminar por debajo de la superficie mínima libre del depósito en una altura aproximada de 100 mm, para impedir la formación de vórtices que pueden llevar aire al fluido. Ya sean las tuberías de aspiración como las de retorno, tienen que cortarse a 45° de manera que no se influya en las tuberías. Los cortes inclinados deben apuntar en direcciones opuestas y con el corte orientado hacia la pared de forma que el fluido aspirado o descargado lo conecte y se enfríe debiendo terminar a una altura de fondo igual al menos a 1.5 veces del diámetro para evitar tener que eliminar posibles sustancias sedimentadas. El depósito particularmente será de construcción rectangular y el aceite debe aspirarse en una zona de calma mientras que el retorno se efectúa por tubo sumergido para que no se produzca emulsión de aceite. La descarga de drenaje debe terminar encima de la superficie máxima libre, con el fin de evitar contrapresiones. El fondo del depósito debe ser cóncavo hacia el centro o bien inclinado de un lado, para poder evacuar fácilmente los condensados y la suciedad mediante la descarga del fondo. El fondo del depósito conviene que esté elevado con respecto al suelo para conseguir la libre circulación del aire ambiente y aumentar de esta manera el calor disipado. Para la comodidad del vaciado, la descarga del fondo está provista de una tubería cerrada a compuerta. Por la misma razón, la altura de la descarga del depósito con relación al suelo debe ser tal que permita la utilización de los oportunos recipientes. 36 Sobre la cubierta superior del depósito normalmente son montadas las válvulas, los manómetros o directamente, en los dispositivos pequeños el grupo motor bomba formando una unidad. Para evitar que durante las operaciones de mantenimiento, el fluido vertido retorne sobre el depósito o bien a tierra, es preciso que la cubierta sea del tipo bandeja receptáculo y que esté dotada de grifo de descarga. En los dispositivos destinados a funcionar en ausencia de control del operador, o bien si se requieren realizar condiciones de seguridad es preciso instalar en el depósito: Dos niveles eléctricos de máxima y de mínima que paren el dispositivo si el nivel del fluido en el depósito sale de su campo normal. Generalmente, el nivel puede disminuir a causa de la rotura de un componente, o puede aumentar por efecto de la condensación de la humedad atmosférica. 2.2 FILTROS Los fluidos hidráulicos se mantienen limpios mediante filtros. También se usan los captadores magnéticos en algunos depósitos para atrapar partículas de hierro o acero que lleva el fluido. Es un aparato cuya función principal es la retención de impurezas del fluido, por medio de un elemento poroso. El elemento poroso es una malla o material filtrante que permite que el fluido pase a través pero quedan detenidos y acumulados los materiales sólidos o las impurezas que acompañan al aceite. En teoría haría falta un filtro de seguridad a la llegada a cualquier componente mecánico que desarrolle una función importante, pero con la 37 práctica se han elegido tres sitios para localizar un filtro como los más idóneos, que son: En la aspiración (a la entrada de la bomba). En la línea de presión (a la salida de la bomba, y en la toma del mecanismo más sensible de la instalación). En el retorno (para retener las impurezas al regreso del aceite y que no vuelvan al depósito). Filtro de aire y de llenado. Un filtro obstruido no realiza a la perfección sus funciones; es más económico cambiar de elemento filtrante que arriesgarse a que los componentes del circuito tengan poca duración y se estropeen con facilidad. 2.2.1 FILTROS DE ASPIRACIÓN Estos filtros son instalados en la línea de aspiración de la bomba dentro del depósito, protegen a las bombas hidráulicas de las partículas contaminantes que podrían ocasionar fallas diversas. Fig. 2.8 Filtros de aspiración. Hay que resaltar que el caudal nominal del filtro de aspiración no debe ser inferior al caudal nominal de la bomba. 38 El medio filtrante es una malla plegada de latón fosforoso, soportado por un tubo de chapa perforada de acero galvanizado. 2.2.2 FILTROS DE PRESIÓN La colocación de estos filtros después de la bomba asegura la alimentación de todos los demás órganos, mediante aceite altamente depurado, ya que puede atrapar partículas más pequeñas que los de la línea de aspiración. Fig. 2.9 Filtros de presión. Presentan la desventaja de estar sometidos a la presión de servicio, por lo que exigen una construcción robusta y totalmente hermética. 2.2.3 FILTROS DE RETORNO Se instalan en la línea de retorno, implica que el fluido del sistema sea filtrado antes de ser devuelto al depósito, impidiendo que las impurezas retornen al depósito, evitando así que vuelvan a penetrar en el circuito. 39 Tiene la ventaja de poder soportar ciertas contrapresiones sin grandes dificultades en el funcionamiento de los componentes ni en la instalación. La elección de un filtro de estas características no debe determinarse teniendo presente sólo el caudal de la bomba, sino que habrá de añadir el caudal de retorno de los diferentes componentes. Fig. 2.10 Filtros de retorno Estos filtros van provistos de un by-pass que puede regularse en función del circuito que deben proteger. 2.2.4 FILTROS DE AIRE Y LLENADO Estos filtros están previstos para ser montados en el depósito y proporcionan una comunicación con la atmósfera. Es decir, permiten que los depósitos se aireen cuando se produzcan variaciones del nivel de aceite. Estos filtros han de cumplir dos funciones: como filtro de aire y de llenado. El primero, actúa al variar el nivel de fluido, por ejemplo, por consumos diferentes, se debe compensar el aire. El aire entrante es filtrado. 40 Fig. 2.11 Filtro de aire y llenado. El segundo, al llenar el tanque con fluido, el filtro impide que entren partículas grandes que luego irán al circuito. Los tamices o filtros de llenado deben limpiarse después de haber llenado con una nueva carga de aceite el depósito. 2.3 APARATOS DE CONTROL En las instalaciones hidráulicas para su medición y control se utilizan diversos accesorios, a continuación se mencionan algunos. Manómetros: indica la presión de los fluidos. Se construyen con un baño de glicerina y caja inoxidable. El resorte es un muelle tubular en bronce. La presión de trabajo medida deberá ser siempre como máxima dos tercios del total de escala. Termómetros: sirven para medir la temperatura. Vienen con la escala graduada, bien en °C o en °F. Indicadores de nivel: se utilizan para medir el nivel del fluido y comprobar las alteraciones que sufre éste debido a los consumos. Pueden ser: 41 Nivel óptico: muestra el nivel de aceite existente en depósito de manera visual. Nivel eléctrico: indicará si el nivel de aceite es bajo por medio de una señal eléctrica acciona una alarma. Termostato: conectado a la fuente de calor sirve para el control de la temperatura de servicio del fluido. Llevan resistencias eléctricas y, los termostatos ordenan su puesta en funcionamiento o paro cuando la temperatura en el interior del depósito no está dentro de los valores estimados como adecuados. a) b) c) Fig. 2.12 Aparatos de control: a) Manómetro, b) Termómetro, c) Indicador de nivel. 2.4 BOMBAS HIDRÁULICAS El trabajo de una bomba es convertir energía mecánica (par de giro, velocidad de rotación) en su equivalente, pero en forma de energía hidráulica (presión y caudal respectivamente). En el momento de seleccionar una o varias bombas para un determinado proyecto, deberá tener en cuenta los siguientes puntos: El valor de presión máxima exigida. El valor máximo de caudal necesario. La velocidad a que debe girar. 42 La temperatura máxima y mínima que el medio puede alcanzar. El tipo de fluido, su viscosidad más alta y más baja. El tipo de accionamiento. La vida útil que se prevé. El nivel de ruido. Otros. Todas las bombas siguen un principio común: se trata de bombas que se diseñan según el principio de desplazamiento de fluido. Es decir, la bomba está construida basándose en cámaras estancas. La función de dichas cámaras es: 1. Absorber fluido por el orificio de entrada (aspiración), para lo que, mecánicamente, se crea en ellas (las cámaras) un vacío. 2. Transportar el fluido, una vez llena la cámara, hasta el orificio de salida. 3. Expulsar a la fuerza (presión) el fluido por el orificio de salida o de presión. Las bombas más utilizadas en los sistemas hidráulicos son las hidrostáticas o mejor conocidas como de desplazamiento positivo, existen tres tipos fundamentales. De cada uno de los tipos hay variantes. De engranajes, con dentado exterior o dentado interior, caudal fijo. De paletas, de caudal fijo o variable. De pistones radiales o axiales, de caudal fijo o variable. 2.4.1 BOMBAS DE ENGRANAJE CON DENTADO EXTERIOR La cámara se forma entre los flancos de los dientes y las paredes de la carcasa. Es decir, el fluido es transportado por el hueco que queda entre los dientes y la pared de la carcasa. 43 Fig. 2.13 Vista interior y exterior de una bomba de engranaje con dentado exterior. Este tipo de bomba permite obtener altos rendimientos volumétricos aun trabajando con presiones elevadas; producen un bajo nivel de ruido y tienen una buena duración. Es de caudal más bien bajo, más bajo cuanto mayor sea la presión que tenga que soportar. 2.4.2 BOMBA DE ENGRANAJES CON DENTADO INTERIOR El principio de desplazamiento es el mismo que para la bomba con dentado exterior, sin embargo es una bomba considerablemente más robusta que la anterior. Fig. 2.14 Vista interior y exterior de una bomba de engranaje con dentado interior. 44 Porque está muy bien compensada proporcionalmente a la presión de trabajo tanto en sentido radial como axial, y que las cargas están bien equilibradas. Si es utilizada para trabajos de pequeña envergadura, es una de las bombas más seguras, de buen funcionamiento, poco ruido y pocas vibraciones, versátil y económica por su larga duración. 2.4.3 BOMBA DE PALETAS DE CAUDAL FIJO Son bombas para trabajar con bajas presiones, sin embargo se fabrican tamaños que pueden desplazar más de 300 litros a 1500 revoluciones. Son bombas algo ruidosas, aunque se han llegado a fabricar modelos en los que se ha reducido considerablemente el ruido y las vibraciones. En la industria en general no son muy utilizadas, a favor tienen que son de muy fácil mantenimiento. Fig. 2.15 Vista interior y exterior de una bomba de paletas de caudal fijo. 45 Se fabrican también bombas de paletas de doble excentricidad, supone que por cada vuelta del eje, las paletas forman dos cámaras, con lo que el caudal que desplazan es también doble. 2.4.4 BOMBA DE PALETAS DE CAUDAL VARIABLE Cuando se quiere tener una presión constante y con gran presión se puede acudir al empleo de este tipo de bombas. En cuanto al principio de funcionamiento no se diferencia de las de caudal fijo en nada. Tan sólo en que se puede desplazar en el sentido de la excentricidad, de forma que: puede optar por excentricidad cero, en donde el caudal desplazado es también cero, o excentricidad máxima donde el caudal es también máximo. El principio de funcionamiento es muy simple. A un lado del eje no excéntrico del anillo está dispuesto un muelle cuya presión se puede variar mediante un tornillo. Fig. 2.16 Vista interior y exterior de una bomba de paletas de caudal variable. 46 Y al otro lado tenemos un pequeño cilindro hidráulico dispuesto de forma antagónica al muelle, este cilindro está conectado internamente con la salida de presión de la bomba. Cuando no hay presión en la salida aunque la bomba esté girando, el valor de la excentricidad del anillo es máximo, porque está empujando contra el cilindro antagónico por el muelle. En este estado el caudal desplazado es máximo. Mientras que la fuerza desarrollada en el cilindro por la acción de la presión de salida no sea superior a la fuerza del muelle, el caudal seguirá siendo el máximo. En cuanto a la presión de salida será la necesaria para que la fuerza del cilindro venza al muelle, el cilindro desplazará al anillo, de forma que éste irá perdiendo excentricidad, a medida que pierde excentricidad se reduce el caudal, si para un mismo trabajo se reduce el caudal se reduce también la presión de salida. Finalmente, se llegará a un estado de equilibrio, es decir, alcanzará la presión que equipara el valor de la fuerza del cilindro con la fuerza del muelle, se generará un determinado valor de desplazamiento del fluido. Y así continuará mientras no se modifique la presión del muelle. Para sistemas de baja potencia, es una bomba muy adecuada y económica. El mayor desgaste que sufre esta bomba es el de las paletas, siempre y cuando se haya cuidado mucho la calidad y contaminación del fluido. En este tipo de bombas se pueden sustituir las paletas, al hacerlo la bomba vuelve a funcionar a pleno rendimiento, incluso, la eventual sustitución de rodamientos y retenes es absolutamente fácil. 47 2.4.5 BOMBAS DE PISTONES Estas bombas abarcan toda la gama de presiones, velocidades y caudales. Son robustas y muy fiables. Además, el principio básico con el que trabajan es el que corresponde perfectamente a una bomba hidráulica. Se diseñan dos modelos, con el mismo principio de funcionamiento, sin embargo son muy distintas: de pistones radiales y de pistones axiales. 2.4.5.1 BOMBA DE PISTONES RADIALES DE CAUDAL FIJO Se trata de una carcasa que aloja en ella los cilindros por donde se deslizan los pistones. En el centro de la carcasa gira un eje, éste tiene una parte que roza con los pistones, esto se conoce como excentricidad (e). Al girar el eje su parte excéntrica obliga a los pistones a salir y entrar en los alojamientos que forman los cilindros; cuando el pistón sale del cilindro absorbe fluido, y cuando entra expulsa el fluido fuera. Fig. 2.17 Vista exterior de una bomba de pistones radiales. El fluido perfectamente conducido por toberas colocadas en el cuerpo de la bomba entra y sale de la bomba sin ninguna dificultad realizándose así el efecto de desplazamiento. 48 Este tipo de bombas no es de mucha utilización en la industria, salvo casos en los que se necesite un valor de presión muy alto de más de 500 bar. Fig. 2.18 Vista interior de una bomba de pistones radiales. La bomba de pistones radiales se compone básicamente de carcasa (1), eje excéntrico (2) y 3, 5 o 10 elementos de bomba (3) con la válvula aspiradora (4), la válvula de presión (5) y el pistón (6). En el proceso de aspiración y desplazamiento los pistones (6) están dispuestos radialmente hacia el eje excéntrico (2). El pistón taladrado de espiga (6) con la válvula aspiradora (4) es conducido dentro de un cilindro (7) y presionado por el muelle (8) contra la excéntrica (2). El radio de la superficie de deslizamiento del pistón corresponde al radio de la excéntrica. El cilindro (7) obtura contra un elemento semicircular (9). Cuando el pistón (6) se desplaza hacia abajo aumenta el espacio de trabajo (10) en el cilindro (7). Por la sobrepresión negativa que se produce, la plaquita de la válvula de aspiración se levanta del canto de obturación. Simultáneamente, a través de una ranura radial (11) en la excéntrica (2) se establece la conexión del espacio de aspiración (12) hacia el espacio de trabajo (10). El espacio de trabajo se llena de líquido. Cuando el pistón se desplaza hacia arriba (6) se cierra la válvula de aspiración (4) y la válvula de presión 49 (5) se abre. El fluido continúa fluyendo a través de la conexión de presión (P) hacia el sistema. 2.4.5.2 BOMBAS DE PISTONES AXIALES DE CAUDAL FIJO Su principio de funcionamiento es el mismo que las bombas radiales, sin embargo su diseño y construcción son muy diferentes. Existiendo dos tipos de construcciones: una denominada de eje inclinado y la otra de placa inclinada. Fig. 2.19 Bomba de pistones axiales de caudal fijo. La construcción de eje inclinado: el bloque o tambor donde se instalan los cilindros está inclinado con respecto al eje, los vástagos unidos por un extremo fijado, de forma flotante, a un plato que a su vez se une al eje del motor. 50 Fig. 2.20 Corte transversal de una bomba de pistones axiales con eje inclinado. Todo el conjunto gira a la vez, el bloque puede hacerlo, bien arrastrado por los mismos pistones, o mediante una junta tipo cardan. Al girar el conjunto, los pistones se ven obligados a moverse dentro de los cilindros gracias a la inclinación, saliendo y entrando; absorbiendo fluido y después expulsándolo. Es decir, provocando el desplazamiento de fluido. La construcción de placa inclinada: en este tipo de diseño, el tambor con los cilindros gira paralelo al eje. Sin embargo, los extremos de los vástagos, que no están unidos al pistón, si están sujetos mediante dos placas que se deslizan entre sí, y unidas, están inclinadas con respecto al eje del conjunto. 51 Fig. 2.21 Corte transversal de una bomba de pistones axiales con placa inclinada. Una de las placas inclinadas es fija, es decir, no gira; la que se desliza sobre ella, y que es donde están fijados los extremos de los vástagos, si gira. Puede deducirse que los pistones están obligados, en el giro, a salir y entrar en los cilindros, y así cumpliendo el desplazamiento del fluido. 2.4.5.3 BOMBAS DE PISTONES AXIALES DE CAUDAL VARIABLE En las máquinas para la producción industrial basadas en la utilización de energía hidráulica, este tipo de bombas es la más utilizada. Además, su mantenimiento es relativamente sencillo y, por tanto, de poco costo. 52 Fig. 2.22 Bomba de pistones axiales de caudal variable. Existen bombas de este tipo con una sola hilera de pistones (generalmente de tres) y con dos hileras que trabajan de forma opuesta, en este caso serán seis pistones que desplazan el fluido. Fig. 2.23 Vista a detalle de una bomba de pistones axiales de caudal variable. 53 Accionando la bomba, el eje dentado de accionamiento gira arrastrando el cilindro que a su vez gira arrastrando a los nueve pistones que monta este tipo de bomba. Los pistones se apoyan mediante los patines de apoyo sobre la superficie de deslizamiento de la placa inclinada y son mantenidos y conducidos forzosamente sobre esta superficie mediante el llamado dispositivo recuperador. En una vuelta, cada pistón efectúa una carrera completa pasando por el punto muerto superior, momento en el cual comienza la zona de aspiración o baja presión y llegando al punto muerto inferior que es dónde comienza la zona de alta presión. El fluido bombeado atraviesa las ranuras de la placa de mando hacia adentro en el lado de aspiración y hacia afuera en el lado de impulsión. La placa inclinada se desliza fácilmente por medio de dos apoyos laterales y es mantenida en la posición cero o posición vertical por medio de un resorte que la mantiene en esta posición hasta que un pistón de posicionamiento comandado hidráulicamente la inclina en función de la presión medida en el conducto de salida. 2.5 MOTORES HIDRÁULICOS Son los elementos de trabajo que se emplean con más frecuencia en la industria. Existe una gran variedad de ellos, los podemos agrupar en motores de engranajes, de paletas, de pistones radiales y de pistones axiales, todo en cuanto a su principio de funcionamiento. 54 Fig. 2.24 Motor hidráulico de FESTO didáctico Las características principales que definen a los motores hidráulicos se resumen a continuación: la cilindrada es la cantidad teórica de aceite necesaria para conseguir una vuelta completa del eje del motor y que suele ⁄ expresarse en y el par de salida o momento de giro. La presión máxima que admiten los motores es otra de las características a tener en cuenta y se expresa en bar. Respecto a estas presiones máximas es preciso contemplar tres casos diferentes: presión continua, presión intermitente y presión punta. La presión continua y constante en el circuito supone también un trabajo continuo de la bomba debido a las condiciones de trabajo externas de la máquina. La presión intermitente se refiere en general a un funcionamiento durante el cual los valores admisibles de presión se producen como máximo durante un tiempo aproximado del 10% de cada minuto. La presión punta se refiere a los casos esporádicos de trabajo o accidentales donde de forma breve se alcanza el valor indicado. Es importante tener en cuenta lo que se denomina pérdida de carga o caída de presión, que es la diferencia que existe entre la presión de entrada al motor o presión que proporciona la bomba, y la presión de salida hacia el retorno del circuito. 55 La potencia es también un factor a considerar cuando se selecciona un motor, ya que se encuentra directamente relacionada con el par de salida y con la velocidad de giro del eje. 2.5.1 MOTORES DE ENGRANAJE Fig. 2.25 Motor de engranajes. Se pueden dividir en motores de engranajes exteriores o interiores. En la fig. 2.26 se ha representado un motor de engranajes exteriores reversible donde puede apreciarse el principio de funcionamiento. Fig. 2.26 Vista interior de un motor de engranajes exteriores. 56 Con los engranajes (3) girando en el interior de la carcasa (2). Al penetrar aceite en el conducto de alimentación (1), la presión del líquido actúa sobre flancos de los dientes obligando a girar a los piñones en el sentido indicado. El fluido una vez ha desarrollado el trabajo, retorna al depósito por el conducto (4) a la presión de salida. Cuando se invierte la alimentación, o sea cuando el motor se alimenta por el conducto (4), el sentido de giro del eje de salida se invierte y el conducto (1) se transforma en conducto de salida. En la fig. 2.27 se muestra un motor de engranajes internos, más sofisticado que el anterior, de mayor rendimiento y desarrollo de pares. Fig. 2.27 Vista interior de un motor de engranajes internos. En estos motores la energía hidráulica se transforma en energía de rotación a través de un delicado diseño de perfiles de engranajes en cuya figura sólo se muestra el funcionamiento básico. La corona de dentado interior (1) es fija y la rueda dentada (2) gira sobre sí misma engranando con la corona y desplazándose a la vez alrededor del centro de la misma, a modo de planeta. El movimiento giratorio combinado del engranaje (2) se transmite al eje de salida mediante un complicado sistema de engranajes, cada vez que la presión del fluido en (3) hace girar al engranaje mencionado. 57 2.5.2 MOTORES DE PALETAS El principio de funcionamiento de estos motores de paletas simple se muestra en la fig. 2.28 donde el aceite a presión proveniente de la bomba, penetra por el conducto (1) que llena las cámaras correspondientes y empuja sobre las paletas (4) solidarias al rotor (2). Fig. 2.28 Vista interior de un motor de paletas. La presión del aceite actuando sobre las paredes de dichas paletas, genera un par de rotación sobre el rotor que gira en el interior de la carcasa (3). El aceite retorna hacia el depósito por el conducto (5), a presión muy inferior a la presión de entrada. Al igual que ocurre con las bombas, este tipo de motor origina desequilibrios en el rotor debido a las diferencias de cargas interiores ya que las presiones sólo actúan en una parte del rotor, sobrecargando en exceso los cojinetes de apoyo. Es por ello que la mayoría de los motores comerciales se construyen como el mostrado en (b) de la misma figura, y se les conoce como motores equilibrados hidráulicamente. Estos motores, con el alojamiento en forma de eclipse, son motores dobles donde la presión del aceite sobre las cámaras opuestas permite el equilibrado ocasionando por el fluido al originarse empujes iguales y 58 opuestos sobre el rotor. En este caso los conductos (2) y (4) representan la entrada de aceite a presión hacia las cámaras correspondientes (1) y (3). Esta pareja de conductos de entrada y otra de salida, sólo existen internamente, ya que el usuario de estos motores dispone como es lógico de una sola entrada de presión y otra de salida para efectuar las conexiones. Fig. 2.29 Motor de paletas. También suelen llevar incorporados estos motores una conexión externa de pequeño paso para facilitar el drenaje o evacuación al depósito de las pequeñas pérdidas internas que se originan durante el funcionamiento. 2.5.3 MOTORES DE PISTONES AXIALES En la fig. 2.30 se muestra uno de estos motores en su expresión más simple. Al penetrar el aceite a presión en las cámaras (4), empuja axialmente a los cilindros (3) y este empuje hace girar al eje principal (2) de salida que se halla alojado en el cuerpo del motor (1). 59 Fig. 2.310 Vista interior y exterior de un motor de pistones axiales. 2.5.4 MOTORES DE PISTONES RADIALES Los motores de pistones radiales se consideran lentos y con pares de salida muy elevados. Se pueden establecer dos tipos fundamentales: los excéntricos y estrella. Fig. 2.11 Motor de pistones radiales. En la fig. 2.32 se presenta de forma simplificada un motor de pistones radiales excéntrico. En el interior del cuerpo principal del motor (3) se alojan los pistones (1) que van provistos en su base de muelles de recuperación (2) que mantienen el contacto permanente con el perfil de la 60 excéntrica (4). Al introducirse aceite a presión en las cámaras (6), la fuerza axial Fig. 2.12 Vista interior de un motor de pistones radiales excéntricos. En la fig. 2.33 se muestra un motor de pistones radiales en forma estrella. A diferencia del caso anterior, donde los pistones son fijos y se deslizan sobre el cuerpo del motor, en este tipo de motores los pistones (2) se hallan montados sobre el mismo rotor (5) que gira solidario con el eje de salida del motor (6). Fig. 2.13 Vista interior de un motor de pistones radiales en forma de estrella. Al penetrar el aceite a presión por los conductos correspondientes a las cámaras (4), obliga a los pistones a desplazarse radialmente, pero al apoyarse éstos, a través de los rodillos (3), sobre el perfil interior curvado 61 de la carcasa (1), se genera el movimiento giratorio del rotor y, por tanto, del eje de salida. Tal y como puede apreciarse en el dibujo esquematizado, el aceite penetra a los pistones por cámaras opuestas (4) con objeto de que exista un equilibrio hidrodinámico y se contrarresten las cargas que se originan interiormente sobre el rotor. Las restantes cámaras (8), también contrapuestas, reenvían mientras tanto el aceite al depósito por los conductos (7). Invirtiendo la alimentación de los conductos, se invierte también el sentido del eje. 2.6 VÁLVULAS ANTIRRETORNO Se denominan válvulas antirretorno a aquellas que son capaces de permitir el paso del fluido en un sentido e impedir que lo haga en sentido contrario. En la fig. 2.34 se muestran de forma esquematizada tres tipos de válvulas antirretorno simples. En (a) se muestra el cierre o hermeticidad de la válvula mediante el empleo de bola o elemento esférico, en (b) un cierre por asiento cónico y en (c), se utiliza para la misma función, un asiento plano. Fig. 2.14 Vista interior y exterior de válvulas antirretorno simples. 62 En todos los casos se aprecia fácilmente el sentido libre de circulación del fluido, que en este caso es de izquierda a derecha, y el sentido del bloqueo es el sentido contrario. Un tipo de válvula antirretorno muy utilizada en circuitos es la válvula antirretorno con desbloqueo hidráulico. Son componentes que, bajo una señal voluntaria de presión a través de un pilotaje sobre la misma válvula, producen el desbloqueo o paso de fluido en el sentido del bloqueo, tal y como se dijo anteriormente. En la fig. 2.35 se muestra el principio de funcionamiento de las válvulas de este tipo. Atendiendo el símbolo de la derecha de la figura, el fluido, una vez vencida la acción del muelle antagonista, circula libremente de (P) hacia (A). Fig. 2.15 Válvula antirretorno con desbloqueo hidráulico. Cumpliendo la función de antirretorno, jamás lo hará de (A) a (P), salvo que sobre el pilotaje de (x), actúe una determinada presión que permita la apertura y el paso del fluido en este último sentido. Ahora en la figura principal, podemos ver que el aceite entra por (P) y venciendo la acción del resorte (5), abre el cierre cónico de la pieza (4), dando paso al fluido hacia la salida (A). 63 Cuando se desea que dicho fluido pase de (A) hacia (P), lo que se hace es introducir aceite a presión por el pilotaje (x) para que la fuerza originada desplace al pistón (2) y su vástago empuje al núcleo (3), que a su vez, produce en primer lugar la apertura del cono de cierre que lleva incorporado, y después el mismo movimiento produce finalmente la apertura del asiento de (4), comunicándose libremente (A) con (P). La presión de pilotaje del conducto (x) depende de la contrapresión en (A), y de la relación de superficies del pistón (2) y de los cierres de (4) y (3). Esta presión de pilotaje suele ser la tercera parte de la mencionada contrapresión en (A). 2.7 VÁLVULAS REGULADORAS DE PRESIÓN Se denominan válvulas reguladoras de presión a todas aquellas que influyen de alguna manera en la presión del fluido. Se van a clasificar en válvulas limitadoras de presión, de descarga, reductoras de presión y de secuencia. Las funciones que cada una de ellas cumplen son similares, y la forma constructiva y el principio de funcionamiento. Sus diferencias se explicarán a continuación. 2.7.1 VÁLVULAS LIMITADORAS DE PRESIÓN Son válvulas cuya misión es controlar la presión de un circuito o una parte de él, con objeto de que dicha presión no supere unos límites establecidos de antemano. En todo circuito hidráulico debe existir al menos una de estas válvulas montada a la salida de la bomba, cuya función sea la de proteger a todo el circuito, incluyendo la bomba, contra un exceso de presión hidráulica. 64 En la fig. 2.36 se muestra una válvula limitadora de presión simple. En donde podemos apreciar, la presión del fluido en (1) del conducto de entrada (1) actúa sobre el pistón de cierre cónico (3), insertado dentro del cuerpo de la válvula (2). Fig. 2.16 Vista interior y exterior de una válvula limitadora de presión simple. Cuando la fuerza originada por dicha presión supera a la ejercida por el resorte (4), el pistón mencionado abre y el fluido pasa de (P) hacia (T), descargándose hacia el depósito. Para regular la presión de apertura de la válvula se utiliza el pequeño volante (6) solidario al tornillo (5), que comprimen en mayor o menor medida al resorte (4). A mayor compresión del muelle, le corresponderá una mayor presión de apertura en el cierre cónico. De esta forma, la presión de apertura puede ser regulada a voluntad de forma y sin ningún tipo de escalonamiento. Ante este modo de funcionamiento, el fluido en la entrada (1) se encontrará como máximo sometido a la presión de apertura del cierre cónico (2), y la cámara en comunicación con el retorno (T), se encontrará libre de presión o sometido a la baja presión que se genere en el retorno común de todo el circuito. En la fig. 2.37 se muestra una válvula de dos etapas, éstas se utilizan cuando los caudales superan un valor determinado. La condición impuesta 65 en estos casos es que es preciso un segundo cuerpo o cuerpo principal, cuyo volumen sí depende del caudal. Fig. 2.17 Válvula limitadora de presión en dos etapas. Esta válvula está formada por un módulo auxiliar (1) o válvula de regulación, cuya forma, constitución interna y modo de funcionamiento, es prácticamente igual a la anterior descrita. En la parte inferior de este módulo va montado, el cuerpo principal (11) o módulo de circulación del aceite. El funcionamiento se produce del siguiente modo: el aceite penetra por (P) del cuerpo principal hacia la cámara (8) del mismo, y de ésta pasa hacia la cámara (2) de la válvula auxiliar. Cuando la presión alcanza un determinado valor, el asiento cónico (3) abre y el aceite se dirige hacia el conducto (10), que comunica con el retorno general al depósito (T). Supongamos ahora que el nivel de presión en las cámaras (P), (8) y (2) no es lo suficientemente elevado como para abrir el cono (3). El colchón de aceite que existe en (8) y el resorte (7), impiden que el núcleo principal con asiento cónico. 66 Cuando la presión alcanza el valor de apertura del cono (3) de la válvula auxiliar, se produce una descomprensión en la cámara (8) permitiendo la apertura del cono (9). De esta forma, mientras se mantiene dicha presión de apertura, el aceite se descarga desde (P) hacia (T) directamente, donde sin presión se dirige hacia el depósito. 2.7.2 VÁLVULA DE DESCARGA EN VACÍO En la fig. 2.38 puede apreciarse una válvula de descarga al vacío, son válvulas reguladoras de presión de dos etapas en las cuales se incluye una pequeña variante consiste en una toma de pilotaje (x) o toma para control remoto. Fig. 2.18 Válvula de descarga en el vacío. Este tipo de válvulas cumplen con una doble función: por una parte se comportan como válvulas limitadoras y por otra parte, son capaces de 67 quedar anuladas como tales, haciendo que el caudal se descargue libremente y sin presión al depósito, pasando de (P) a (T) del bloque principal. Tal y como se aprecia en la figura, la toma de pilotaje (x) de la válvula simple, se comunica con el conducto (B) de la electroválvula superior que, se encuentra cerrada en reposo. Sin señal eléctrica en la bobina de dicha electroválvula, el conjunto se comporta como una válvula limitadora convencional. Al recibir señal eléctrica la bobina, el conducto (B) de la electroválvula se comunica a la vez con (P) y con (T), para descargar el pequeño caudal de fluido del pilotaje hacia el tanque. Esta acción descomprime la cámara posterior del pistón de la válvula principal y el cono de la válvula abre libremente, pasando el aceite directamente de (P) a (T), venciendo únicamente la pequeña resistencia que ofrece el resorte incorporado en el mencionado cono de cierre. 2.7.3 VÁLVULAS REDUCTORAS DE PRESIÓN Y DE SECUENCIA Las válvulas reductoras de presión son componentes que se utilizan cuando en una parte del circuito hidráulico cualquiera, requiere una presión diferente a la presión del circuito principal, esta presión secundaria sólo puede ser igual o inferior a dicha presión general. Este tipo de válvulas aprovechan el caudal de salida para realizar una determinada función. En la fig. 2.39 podemos ver el funcionamiento de estas válvulas, (a) trata de un sistema capaz de autocalibrarse, comparando de forma continua el valor de la presión de salida con el valor de la presión suficiente como para vencer la fuerza de un resorte antagonista. 68 Fig. 2.19 Vista interior y exterior de una válvula reductora de presión y de secuencia. En la figura se muestra el fluido circulante de (P) hacia la salida (A). Supongamos que la presión en (P) es superior a la de (A) regulada por la mayor o menor compresión del resorte (1). La presión de la cámara (2) es la presión de (P), que actúa sobre las dos caras de la corredora (3) equilibrándola. La cámara (4) se encuentra a la misma presión de salida de (A) y, por tanto, comprime al mencionado resorte. Si la presión de (A) aumenta, el muelle se comprime desplazándose el pistón (3) que cierra el paso del aceite desde (2) hacia (A) mediante el borde de dicho pistón, hasta que se restablece el equilibrio entre la presión de salida y la regulada por el muelle. Las válvulas de secuencia son válvulas reguladoras de presión en las cuales, el fluido solamente circula hacia la salida, cuando la presión de entrada alcanza determinado valor establecido previamente. Bastará con derivar el caudal de salida hacia un circuito secundario de utilización, en lugar de renviarlo hacia el depósito. Dado que todas estas válvulas funcionan bajo un mismo principio, e incluso tiene la misma forma exterior que las válvulas funcionan bajo un mismo principio, sólo se muestra en la figura (b), el símbolo que las identifica. 69 2.8 VÁLVULAS REGULADORAS DE CAUDAL Su función principal es la de controlar la cantidad de aceite que se envía a los actuadores o componentes de trabajo. En general los reguladores de caudal limitan el paso del mencionado caudal, enviando el resto del fluido hacia el depósito. En la fig. 2.40 se muestra un estrangulador o regulador de caudal simple, que al no incorporar válvula antirretorno permite la circulación del fluido estrangulado en ambos sentidos, por lo que se conoce también con el nombre de estrangulador bidireccional. Fig. 2.20 Válvula reguladora de flujo bidireccional. Está formado por un cuerpo (1) donde se aloja un dispositivo de cierre (2), regulable a través de un pequeño volante. Estrangulando en mayor o menor grado el paso, consigue aumentar o disminuir el caudal que circula de una a otra parte. El caudal sobrante se descargará a depósito a través de la válvula limitadora de presión general del circuito. En la figura mostrada, la estrangulación se realiza mediante un sistema denominado de aguja, que consiste en un cono alargado que al aproximarse o alejarse del asiento cónico, produce de forma progresiva el aumento o disminución del paso del fluido. En la fig. 2.41 se muestra una válvula estranguladora con válvula antirretorno incorporada, que permite que el caudal pueda ser regulado en 70 un sentido y, en cambio, en sentido contrario circula libremente sin tener que pasar por la estrangulación. Fig. 2.21 Válvula estranguladora con antirretorno. Como puede apreciarse en la figura, de (A) a (B) el paso puede ser estrangulado de la misma forma que en el caso anterior. La circulación libre se produce en sentido contrario, es decir, de (B) a (A) a través del cierre de bola (2) y del resorte (1). En la fig. 2.42 se muestra una válvula reguladora de caudal compensado de dos vías. Estas válvulas compensadas por presión controlan los caudales de salida de la válvula. Fig. 2.22 Válvula reguladora de dos vías. 71 Como puede apreciarse en la figura, esencialmente constan de un bloque o cuerpo (1) donde el conducto (A) es el de entrada del caudal y el (B) el de la salida controlada. La comunicación en el sentido de (B) hacia (A) tiene lugar sin estrangulación, a través del conducto (2) y la antirretorno (3). La regulación del caudal de salida se controla mediante el giro, desde el mando exterior, del cierre de excéntrica (7). En el interior se aloja también un pistón compensador (5) que funciona como válvula equilibrada hidráulicamente. La presión en (8) que existe inmediatamente antes del controlador (7), actúa sobre las dos superficies laterales del pistón. Las fuerzas aplicadas sobre el mismo son el resultado de la presión de salida en (B) y el resorte (6) por una parte y, por otra, la presión existente en (8). Ambas fuerzas contrapuestas hacen que dicho pistón se equilibre automáticamente, obteniéndose con ello la adecuada fuerza de regulación para que la superficie de dosificación (4), no sea mayor que la necesaria. El pistón estrangula el paso de fluido únicamente lo justo, para mantener la caída de presión constante. 2.9 ELECTROVÁLVULAS Son elementos de control que se encargan de convertir las señales eléctricas en señales hidráulicas. Las electroválvulas convencionales, constan de un cuerpo central o bloque por el que desliza una corredera, y una o dos bobinas electromagnéticas laterales para su accionamiento según se muestra en la fig. 2.43. 72 Fig. 2.23 Electroválvulas de una etapa. Aunque se les denomina direccionales, cumplen la doble función de direccionar el fluido hacia las cámaras correspondientes de los actuadores y la de hacer de estranguladoras de flujo o reguladoras de caudal. En las válvulas de simple etapa la bobina actúa directamente sobre la corredera obligando a que ésta se desplace para permitir direccional el caudal o regularlo. En las de doble etapa o pilotadas, la primera etapa se encarga de regular de forma proporcional la presión del pequeño caudal de pilotaje que actúa en la segunda etapa sobre la corredera principal. La magnitud del desplazamiento de la corredera dependerá de la fuerza de empuje, que a su vez dependerá del valor de esa presión de pilotaje, controlada desde un valor cero, hasta unos valores máximos, que son más bien bajos, comparados con la presión máxima de trabajo. En (a) de la figura se muestra una válvula proporcional de accionamiento directo y representada de forma muy simple, sin detalles secundarios o que 73 carezcan de interés, y también se representan los símbolos de las válvulas más frecuentes. La válvula de (b) es de centro cerrado y con regulación del caudal en todas las vías, tal y como puede apreciarse. La válvula de (c) es una de centro cerrado también pero con regulación limitada a las vías de (A) a (R) y de (B) a (R). En las figuras (d) y (e) se muestran válvulas con centro donde se comunican (A), (B) y (R). Y con las mismas regulaciones de las válvulas anteriores. En la fig. 2.44 se muestran otras válvulas de dos etapas o válvulas pilotadas hidráulicamente Fig. 2.24 Electroválvula de dos etapas. 2.10 CILINDROS Los cilindros son actuadores lineales. Por lineal queremos decir que el trabajo de un cilindro se realiza en línea recta. Un cilindro está compuesto fundamentalmente por un émbolo de sección circular y un vástago que se mueven dentro de la camisa tubular del cilindro está concebido para efectuar dos movimientos: avance o extender (compresión) y otro retroceder o recoger (tracción) y debe hacerse todo lo imprescindible posible para atacar fuerzas laterales, empleando como procedimientos: el tipo del soporte o de fijación adecuado, las rótulas, etc. 74 2.10.1TIPOS DE CILINDROS Simple efecto CILINDROS Doble efecto Sin recuperación interna Con recuperación interna Vástago simple Vástago doble Diferencial Tabla 2.3 Tipos de cilindros. 2.10.1.1 CILINDROS DE SIMPLE EFECTO Los cilindros de simple efecto retroceden o se recuperan por resorte o por una fuerza exterior no definida, teniendo en cuenta una sola carrera de trabajo. Reciben solamente por una de su cara el caudal que proviene de la bomba, es decir, tiene una sola conexión de fluido para mover el pistón. Fig. 2.25 Cilindro de simple efecto. 2.10.1.2 CILINDROS DE DOBLE EFECTO Existen de vástago simple y doble, en el primer caso, las carreras de avance y de retroceso se consiguen porque el aceite a presión puede entrar por cualquier lado del cilindro y provoca, en consecuencia, el 75 movimiento del pistón hacia uno u otro sentido. Dispone de dos conexiones independientes entre sí para la entrada del aceite. Fig. 2.26 Cilindro de doble efecto. Los cilindros con doble vástago en donde los dos cabezales deben estar taladrados, se emplean en aquellos casos en que resulta ventajoso acoplar una carga en cada extremo, o bien, cuando se requiere el mismo desplazamiento en ambas carreras. Existe también el cilindro diferencial, este presenta la misma apariencia externa que un cilindro de doble efecto normal. Su diferencia estriba en que la sección del émbolo es exactamente igual al doble del vástago. Por consiguiente, para una misma presión la fuerza desarrollada en la salida del vástago es justamente dos veces mayor que en la entrada. Al llenarse las cámaras iguales, pero de distinto volumen dada las diferencias de áreas, las velocidades de carrera son inversamente proporcionales a la superficie. Para concluir este capítulo es importante mencionar la seguridad en todos los componentes hidráulicos, por eso es necesario conocer la presión mínima y máxima permisible para garantizar un buen funcionamiento. En el caso de los cilindros de doble efecto, el efecto de intensificación de la presión puede producir un incremento proporcional a la relación de superficies de émbolo de 1:1,7. 76 Descripción Símbolo Grupo hidráulico, detallado Grupo hidráulico, simplificado Tanque Filtro Motor hidráulico Manguera flexible Manómetro Válvula estranguladora Válvula reguladora de caudal unidireccional Válvula de interrupción Válvula antirretorno Válvula de desconexión y frenado Tabla 2.4 Símbolos para los elementos hidráulicos. 77 Descripción Símbolo Válvula limitadora de presión Reguladora de presión Presostato Válvula antirretorno pilotada Válvula reguladora de caudal Electroválvula 3/2 vías Electroválvula 4/2 vías Electroválvula 4/3 vías, centro cerrado Electroválvula 4/3 vías, centro de descarga Electroválvula 4/3 vías, centro a recirculación Cilindro de simple efecto Cilindro de doble efecto Tabla 2.4 Símbolos para los elementos hidráulicos (continuación). 78 CAPÍTULO 3 EL PLC 79 3.1 AUTOMATIZACIÓN Para comprender qué es un PLC y sus aplicaciones se necesita conocer un término muy necesario que ha sido integrado a la vida actual, la automatización. Automatización (del griego antiguo auto: guiado por uno mismo) es el uso de sistemas de control y de tecnología informática para reducir la necesidad de la intervención humana en un proceso. En el enfoque de la industria, automatización es el paso más allá de la mecanización en donde los procesos industriales son asistidos por máquinas o sistemas mecánicos que reemplazan las funciones que antes eran realizadas por animales o humanos. La automatización como una disciplina de la ingeniería que es más amplia que un mero sistema de control, abarca la instrumentación industrial, que incluye los sensores, los transmisores de campo, los sistemas de control y supervisión, los sistemas de transmisión y recolección de datos y las aplicaciones de software en tiempo real para supervisar y controlar las operaciones de plantas o procesos industriales. Las principales ventajas de aplicar automatización a un proceso son: Reemplazo de operadores humanos en tareas repetitivas o de alto riesgo. Reemplazo de operador humano en tareas que están fuera del alcance de sus capacidades como levantar cargas pesadas, trabajos en ambientes extremos o tareas que necesiten manejo de una alta precisión. Incremento de la producción. Al mantener la línea de producción automatizada, las demoras del proceso son mínimas, no hay agotamiento o desconcentración en las tareas repetitivas, el tiempo de ejecución se disminuye considerablemente según el proceso. 80 3.2 DESCRIPCIÓN DEL PLC PLC, (Programable Logic Controller, por sus siglas en inglés), se define como: Un sistema electrónico de funcionamiento digital, diseñado para ser utilizado en un entorno industrial. Utiliza una memoria programable para el almacenamiento interno de instrucciones orientadas al usuario, para la realización de funciones: enlaces lógicos, secuenciación, temporización, recuento y cálculo, para controlar a través de entradas y salidas digitales o analógicas, diversos tipos de máquinas o procesos. Fig. 3.427 PLC de FESTO. Desde finales de los años sesenta, los PLC’s han tenido gran aceptación en el sector industrial para realizar las tareas de automatización. En 1969 la división Hydramatic de la General Motors instaló el primer PLC para reemplazar los sistemas inflexibles alambrados usados entonces en sus líneas de producción. En 1971, los PLC’s se extendían a otras industrias y, en los ochentas, ya los componentes electrónicos permitieron un conjunto de operaciones de 16 bits en un pequeño volumen, lo que los popularizó en todo el mundo. 81 Básicamente existen tres lenguajes de programación de PLC’s, Diagrama de escalera, Listado de instrucciones y Diagrama de funciones, aunque algunos fabricantes de PLC´s utilizan para su programación lenguajes de computadoras como Pascal, C o Basic. Existen muchas marcas comerciales de PLC’s, tales como FESTO, Siemens, Allen Bradley, Modicon, Moeller, etc. Todos con sus características muy especiales según su arquitectura y filosofía de diseño, pero hay algo que los hace muy semejantes, su programación. Como se ha comentado existen varios fabricantes de PLC’s en este caso se mencionará dos modelos particulares: el FEC Compacto y el FEC Standard. 3.2.1 FEC COMPACTO El FEC Compacto es más que una unidad de control sencilla y económica de la marca FESTO. El FEC Compacto demuestra que una solución económica se puede combinar perfectamente con tecnología avanzada y gran funcionalidad. Las características básicas son típicas para un control sencillo y pequeño: 12 entradas a 24 Vdc. 8 salidas a 24 Vdc o relevador. 2 interfaces serie. Contador rápido para uso de tareas de posicionamiento sencillas. Las versiones de 110/230 Vac permiten prescindir de alimentación de 24 Vdc. Las entradas pueden estar conectadas a positivo o negativo y los relevadores de salida a corriente alterna o continua. Una unidad de control pequeña no solamente debe tener dimensiones compactas, sino también debe integrarse apropiadamente en el sistema. 82 Para conseguirlo, se puede recurrir al FEC Compacto con conexión a red Ethernet. Entradas. Las entradas pueden ser PNP o NPN. Basta con conectar a 0 Vdc o +24 Vdc los bornes marcados con S0 y S1. Salidas. Todos los FEC Compacto tienen salidas de relevador conectables a máximo 230 Vac. Los controles FC2X disponen de 8 salidas de relevadores. Los controles FC3X tienen 2 salidas a relevadores y 6 de transistores. Programación. El FEC Compacto puede programarse con FST o Multiprog. FST es el único lenguaje de programación ampliamente difundido y sencillo que permite programar tal como se piensa. Además, FST acepta el comando STEP (paso) para la programación de secuencias. Con FST se puede programar a través de Ethernet, además de poderle integrar una página WEB al controlador utilizando su WEB Server. Multiprog es un sistema de programación según la norma IEC 6 1131-3 que incluye los 5 lenguajes de programación normalizados. MWT facilita la programación en concordancia con la norma mediante ayudas integradas para las operaciones y los módulos, así como para la administración de variables. 3.2.2 FEC STANDARD El FEC Standard no es tan sólo un mini control, demuestra que aún es posible la innovación en mini controles, en los albores del siglo XXI, fabricado por FESTO. Con su robusto cuerpo de aluminio anodizado, demuestra que el diseño compacto y la resistencia pueden ser compatibles. 83 Las características básicas son muy similares al FEC Compacto. 16 o 32 entradas a 24 Vdc. 8 o 16 salidas a 24 Vdc. 2 interfaces serie. Contador rápido para uso de tareas de posicionamiento sencillas. El FEC Standard al igual que el FEC compacto puede integrarse apropiadamente en el sistema. Para conseguirlo, se puede recurrir al FEC Standard con conexión a red Ethernet. Entradas. Las entradas digitales son a 24 Vdc PNP y las analógicas son de 0 a 20 mA con 12 bits de resolución. Salidas. Las salidas digitales son de 24 Vdc a 400 mA, a prueba de corto circuito y para cargas de baja resistencia. Las salidas analógicas son de 0 a 20 mA con 12 bits de resolución. Programación. El FEC Standard puede programarse con FST o Multiprog. 3.3 ARQUITECTURA INTERNA DEL PLC Un PLC posee las herramientas necesarias, tanto de software como de hardware, para controlar dispositivos externos, recibir señales de sensores y tomar decisiones de acuerdo a un programa que el usuario elabore según el esquema del proceso a controlar. Lo anterior significa que, además de los componentes físicos requeridos para la adaptación de las señales, es necesario disponer de un programa para que el PLC pueda saber qué es lo que tiene para hacer con cada una de ellas. 84 La estructura básica de un PLC es la siguiente: Fuente de alimentación. CPU. Memorias. Interfases de entrada y salida. Fig. 3.28 Diagrama de la arquitectura del PLC. 3.3.1 FUENTE DE ALIMENTACIÓN Es la encargada de suministrar el voltaje a todos los módulos que se conecten al PLC, así como a la unidad de procesamiento. Su función es reducir y adaptar el voltaje de entrada, que es de valores elevados y de corriente alterna, a voltajes de valores más bajos y de corriente directa. Inicialmente, el voltaje de entrada debe ser reducido a valores más manejables. Luego, por medio de un rectificador, debe ser convertido de CA a CD. Por último, se deben utilizar reguladores para asegurar la estabilidad en el voltaje de salida. Debido a la importancia de un PLC dentro de un proceso automático, la alimentación de sus circuitos es de suma importancia, por lo que un buen 85 diseño debe involucrar una fuente alterna que permita entrar en funcionamiento cuando se cae el fluido eléctrico. Con esto, aseguramos que los dispositivos electrónicos internos no sufran fallas por picos de sobrevoltaje y otros efectos contraproducentes existentes en la red de distribución. 3.3.2 CPU Esta es la parte principal de un PLC y es el dispositivo encargado de tomar las decisiones de acuerdo al estado lógico de las entradas, de las salidas y del programa que se esté ejecutando, es decir, lee las señales de entrada, las procesa y dependiendo de ello, cambia el estado de las salidas. Tales decisiones dependen del programa (software) que se haya diseñado para el control del proceso. Está compuesta principalmente de un microprocesador, al que le colaboran una serie de dispositivos electrónicos tales como memoria RAM, memoria ROM, circuitos de control de flujo de datos, etc. Así mismo, la CPU puede tener integrada alguna unidad especial para comunicaciones con dispositivos externos tales como impresoras, computadoras personales, programadores manuales, etc., aunque dichos sistemas de comunicación también pueden estar en módulos independientes. La función principal del microprocesador es tomar los estados de cada una de las entradas, que ya deben estar en posiciones de memoria llamadas imagen de entradas, interpretar el programa que tenga almacenado en la memoria de programa, analizar el proceso de acuerdo a dicho programa, y ordenar la activación de salidas, también a través de posiciones de memoria llamadas imagen de salidas, fig. 3.49. 86 En realidad, el microprocesador no se entiende directamente con módulos externos de entradas y salidas, son otros circuitos los que las leen y las ubican en posiciones estratégicas de memoria para que él vaya, las analice y escriba los nuevos valores que se quieren ejecutar externamente. Fig. 3.429 Funciones del microprocesador. Recordando que una unidad central de proceso está compuesta principalmente por uno o varios microprocesadores. Por su parte, un microprocesador posee internamente varios bloques que tienen una función específica dentro del proceso de la información, se analizarán los más importantes. 1. ALU o Unidad Aritmético-Lógica: es el bloque encargado de ejecutar todas las operaciones matemáticas y lógicas durante la ejecución de un programa. 2. Acumulador: es donde se almacena la última operación ejecutada. Por ejemplo, en una suma, allí quedará el resultado de la misma. Un microprocesador puede tener varios acumuladores. 3. Banderas (flags): son indicadores de situaciones especiales luego de una operación cualquiera dentro del microprocesador. Allí aparece si el resultado fue negativo, si fue cero, si hubo sobre flujo, si fue mayor, 87 menor, etc. Las banderas se utilizan para monitorear las operaciones que se efectúan con el microprocesador. 4. Contador de programa o PC: es el encargado de leer las instrucciones del usuario y la secuencia de ejecución. Contiene la información del sitio exacto de la secuencia del programa en ejecución. Acepta saltos que el mismo programa le indique de acuerdo a situaciones especiales de las entradas y salidas. 5. Decodificador de instrucciones: es el encargado de ejecutar las instrucciones que el programa le va indicando, decodificando el contenido de cada una de ellas y suministrando las señales de respuesta o de control. La mayoría de los CPU de los PLC’s poseen un selector o una serie de luces indicadoras que sirven para que el usuario seleccione el modo de operación y visualice el estado actual de funcionamiento. Nota importante: Se debe tener mucho cuidado al mover el selector del modo de operación ya que el PLC puede iniciar el proceso automático, lo que pone en riesgo toda la maquinaria y la integridad física de los operarios, si la planta no se encuentra preparada para ello. 3.3.3 MEMORIAS Dentro del CPU se dispone de un área de memoria, la cual se empleará para diversas funciones: Memoria del programa de usuario: aquí introduciremos el programa que el PLC va a ejecutar cíclicamente. Memoria de la tabla de datos: suele subdividir en zonas según el tipo de datos (como marcas de memoria, temporizadores, contadores, etc.). Memoria del sistema: aquí se encuentra el programa en código máquina que monitorea el sistema. Este programa es ejecutado directamente por el microprocesador que posea el PLC. 88 Memoria de almacenamiento: se trata de memoria externa que empleamos para almacenar el programa de usuario, y en ciertos casos parte de la memoria de la tabla de datos. Fig. 3.30 Memorias de un PLC. 3.3.4 INTERFASES DE ENTRADA Y SALIDA Los módulos de entrada / salida se dividen básicamente en dos grupos: • Módulos de entrada / salida discretos. • Módulos de entrada / salida analógicos. Se cuenta con una gran variedad de módulos discretos y analógicos para adaptarlos óptimamente al tamaño del proceso o máquina. Estos pueden ser usados en cualquier combinación de tipo y numero de ellos insertados en las ranuras del chasis. 89 Módulos de entradas discretas o digitales: los instrumentos de campo tales como los interruptores o sensores, envían señales de abierto o cerrado al PLC. Estas son señales de entrada discretas. Por ejemplo: un botón de inicio, un interruptor, un interruptor de límite, un interruptor de flujo, un interruptor de nivel, un interruptor de presión, un interruptor de proximidad. Módulos de salidas digitales: las salidas discretas se emplean para girar actuadores de campo cerrado o abierto, por ejemplo: solenoides, bobinas de contactores, lámparas, etc. Módulos de entradas analógicas: los instrumentos de campo, tales como los sensores de temperatura, presión o nivel envían señales que varían su valor hacía el PLC. Estas son las llamadas señales de entrada analógicas: una entrada analógica es una señal eléctrica de un sensor de campo que varía de acuerdo al cambio de las condiciones del proceso. Módulos de salidas analógicas: las señales de salida analógicas son usadas para controlar y variar la velocidad de motores, bombas u otros equipos que cuentan con un rango de operación. Algunos de los dispositivos que se requieren para la utilización de un PLC son los sensores, a continuación se conocerán qué son y cómo funcionan. 3.4 SENSORES El término sensor y transductor se suelen aceptar como sinónimos, aunque, el término transductor es más amplio, incluyendo una parte sensible o captador y algún tipo de circuito de acondicionamiento de la señal detectada. Entonces podemos definir a un sensor como un dispositivo capaz de convertir el valor de una magnitud física en una señal eléctrica codificada, ya sea en forma analógica o digital. 90 Un sensor ideal sería aquel en que la relación entre la magnitud de salida y la variable de entrada fuese puramente proporcional y de respuesta instantánea e idéntica para todos los elementos de un mismo tipo. Sin embargo, la respuesta real de los sensores nunca es de todo lineal, tiene un campo limitado de validez, suele ser afectada por perturbaciones del entorno exterior y tiene un cierto retardo a la respuesta. 3.4 1 SENSORES DE POSICIÓN Los sensores de posición permiten medir la distancia de un objeto respecto a un punto o eje de referencia o simplemente detectar la presencia de un objeto a una cierta distancia. Su capacidad de medida o sólo indicación de presencia y la capacidad de medir distancias más o menos grandes permiten establecer una división en los grupos que se citan a continuación: Detectores de presencia o proximidad. Se trata de sensores de posición toda o nada que entregan una señal binaria que informa de la existencia o no de un objeto ante el detector. El más elemental de estos sensores es el conocido interruptor final de carrera por contacto mecánico. Medidores de distancia o posición. Entregan una señal analógica o digital que permite determinar la posición lineal o angular respecto a un punto o eje de referencia. 3.4.1.1 SENSORES DE PROXIMIDAD Los sensores de proximidad pueden estar basados en distintos tipos de captadores, siendo los más frecuentes los siguientes: Sensores inductivos. 91 Sensores capacitivos. Sensores ópticos. Por lo general, se trata de sensores con respuesta todo o nada, con una cierta histéresis en la distancia de detección y con salida a base de interruptor estático (transistor, tiristor o triac) pudiendo actuar como interruptores de CD o de CA. 3.4.1.1.1 SENSORES INDUCTIVOS Este tipo de sensores incorporan una bobina electromagnética la cual es usada para detectar la presencia de un objeto metálico conductor, ignorando objetos no metálicos. Los sensores inductivos tienen bobinas enrolladas en núcleo de ferrita. Estas pueden ser blindadas o no; generalmente los no blindados tienen una mayor distancia de sensado que los blindados. Fig. 3.31 Sensor inductivo. Los sensores blindados pueden ser montados al ras de metal, pero se recomienda dejar un espacio libre de metal abajo y alrededor de la superficie de sensado. Los sensores no blindados no pueden ser montados al ras de un metal, pues deben tener un área libre de metal alrededor de la superficie de sensado. 92 El campo de aplicación más importante de los sensores inductivos son como interruptores de final de carrera con algunas ventajas con respecto a los electromecánicos, tales como: ausencia de contacto con el objeto a detectar, robustez mecánica, resistencia a ambientes agresivos y altas temperaturas y bajo precio. 3.4.1.1.2 SENSORES CAPACITIVOS El principio de funcionamiento y las características son similares a las descritas para los sensores inductivos. Este tipo de sensores permiten detectar materiales metálicos o no, pero su sensibilidad se ve muy afectada por el tipo de material y por el grado de humedad ambiental y del cuerpo a detectar. Los sensores capacitivos constan de un condensador que genera un campo eléctrico. Este condensador forma parte de un circuito resonador, de manera que cuando un objeto se acerca a este campo, la capacidad aumenta y el circuito empieza a resonar. Fig. 3.32 Sensor capacitivo. Entre las ventajas podemos decir que detectan prácticamente todos los materiales, una mayor velocidad de accionamiento que la de los sensores inductivos y la suciedad no tiene gran influencia. Mientras que en las desventajas son más caros que los sensores inductivos y no poseen una distancia de detección tan grande como los sensores ópticos. 93 3.4.1.1.3 SENSORES ÓPTICOS Los sensores ópticos emplean fotocélulas como elementos de detección. Algunos tipos disponen de un cabezal que incorpora un emisor de luz y la fotocélula de detección, actuando por reflexión y detección del haz de luz reflejado sobre el objeto que se pretende detectar. Otros tipos trabajan a modo de barrera y están previstos para detección a mayores distancias con fuentes luminosas independientes del cabezal detector. Ambos tipos suelen trabajar con frecuencias luminosas en la gama de los infrarrojos. Fig. 3.33 Sensor óptico. Las características particulares de los sensores de proximidad ópticos son: Elevada inmunidad a perturbaciones electromagnéticas externas. Distancias de detección grandes respecto a los inductivos o capacitivos. Se obtienen fácilmente hasta 500m en modo barrera, y hasta 5m por reflexión. Alta velocidad de respuesta y frecuencia de conmutación. Permiten la identificación de colores. Capaces de detectar objetos del tamaño de décimas de milímetro. Otra variante de sensores ópticos son los de fibra óptica, que tienen los puntos de emisión/recepción de luz separados de la unidad generadora, y unidos a ella mediante fibra. De esta forma, la detección puede llevarse a puntos inaccesibles para las fotocélulas de barrera o reflexión, aprovechando la flexibilidad de la fibra. 94 3.5 OPERANDOS DEL PLC En este apartado se introducirá a los identificadores usados en los PLC’s de FESTO para referirse a los diferentes elementos del sistema, ya sea software o hardware. Estos identificadores del sistema (ejemplo: entradas, salidas, banderas) serán referenciados como Operandos. Los operandos son elementos contenidos en el controlador y que pueden ser interrogados o manipulados usando instrucciones de programa. El software de FESTO, llamado FST, permite que los programas puedan ser escritos utilizando operandos absolutos y/o operandos simbólicos. Un operando absoluto es la descripción específica del operando del PLC, independientemente de la aplicación (ejemplo: I0.0, F3.1, etc.). El operando simbólico se especifica de acuerdo a la aplicación y va referenciado al operando absoluto (ejemplo: Start, Stop, Motor1, etc.). Fig. 3.34 Operandos absolutos y simbólicos. 3.5.1 ENTRADAS Los PLC’s de FESTO poseen 256 palabras de entradas (0 a 255), cada una de 16 bits (0 a 15), pueden ser direccionados como bits o como palabras. Las entradas son el medio por el cual el PLC recibe las señales del sistema, dichas señales pueden ser sensores, retro avisos de magneto térmicos, botoneras, etc. 95 Operando Identificador Entrada bit I Sintaxis Iw.b Parte Ejemplo Condicional Tabla 3.5 Direccionamiento de entradas. 3.5.2 SALIDAS Los PLC de FESTO poseen 256 palabras de salidas (0 a 255), cada una de 16 bits (0 a 15), pueden ser direccionados como bits o como palabras. Las salidas son el medio por el cual el PLC comanda a los diferentes elementos que van a realizar un trabajo en la máquina, por ejemplo, la bobina de un contactor, la bobina de una electroválvula neumática o hidráulica, o un piloto luminoso. Operando Salida bit Identificador O Sintaxis Ow.b Parte Ejemplo Condicional Ejecutiva Tabla 3.6 Direccionamiento de salidas. 96 3.5.3 BANDERAS Los PLC de FESTO poseen 10000 palabras de banderas (0 a 9999), cada una de 16 bits (0 a 15), pueden ser direccionados como bits o como palabras. Las banderas son localidades de memoria del PLC en las cuales se pueden almacenar información. Operando Bandera bit Identificador F Sintaxis Fw.b Parte Condicional Ejemplo Ejecutiva Tabla 3.7 Direccionamiento de bandera. La bandera de ejecución inicial es una bandera única por cada uno de los programas que existan en el proyecto, esta bandera siempre es igual a cero, a excepción del primer ciclo de operación del programa en que es igual a uno. Operando Identificador Bandera de FI ejecución inicial Sintaxis FI Parte Condicional Ejemplo Tabla 3.8 Direccionamiento de bandera de ejecución inicial. 97 3.5.4 TEMPORIZADORES Los temporizadores son parte esencial de un programa, ya que con ellos se logra poner en sincronía los diferentes movimientos que ejecuta una máquina, bien es cierto que se puede prescindir el uso de temporizadores, pero esto incrementa el uso de sensores. Los PLC’s de FESTO manejan tres tipos de temporizadores, el temporizador de impulso, el temporizador de retraso a la conexión y el temporizador de retraso a la desconexión. Podemos manejar hasta 256 temporizadores (0 a 255), cada contador ofrece los siguientes operandos para permitir una programación flexible. La palabra de temporizador (Timer Word-TWnn-) es el operando en el cual el valor actual es guardado y este es cambiado continuamente en la operación del temporizador. La palabra de temporizador se carga con el valor de la palabra de preselección al inicio de la operación del temporizador. La palabra de preselección (Timer Preselect-CPnn-) es el operando en el cual el valor nominal es guardado. Bobina del temporizador (Tnn, TONnn, TOFFnn) es el operando en el cual se realizan las operaciones de inicio o fin del temporizador. Contacto del temporizador (Tnn, TONnn, TOFFnn) es el operando en el cual es guardado el estado del temporizador. 3.5.4.1 TEMPORIZADORES DE IMPULSO El temporizador de impulso reacciona al flanco de subida, en el instante en que la condición se hace verdadera el temporizador se hace uno y el registro de tiempo predefinido (TPnn) se carga en el registro de tiempo actual o palabra de cuenta (TWnn) y este empieza a decrecer. 98 Cuando el TWnn se hace cero, en ese instante el temporizador se hace cero, nn es el número del temporizador. En la tabla 3.8 se puede apreciar el funcionamiento de este temporizador. Operando Temporizador de impulso bit Identificador T Sintaxis Tnn Parte Condicional Ejemplo Ejecutiva Tabla 3.9 Direccionamiento de temporizador de impulso. 3.5.4.2 TEMPORIZADOR DE RETRASO A LA CONEXIÓN En el instante en que la condición se hace verdadera el registro de tiempo predefinido (TPnn) se carga en el registro de tiempo actual o palabra de cuenta (TWnn) y este empieza a decrecer, cuando el TWnn se hace cero, en ese instante el temporizador se hace uno. El temporizador se hace cero cuando la condición se hace falsa, si por alguna circunstancia la condición se hace falsa antes de haber transcurrido el tiempo predefinido, entonces el temporizador no se hará uno, nn es el número del temporizador. En la tabla 3.9 se puede apreciar el funcionamiento de este temporizador. 99 Operando Temporizador de retraso a la conexión bit Identificador TON Sintaxis TONnn Parte Condicional Ejemplo Ejecutiva Tabla 3.10 Direccionamiento de temporizador de retraso a la conexión. 3.5.4.3 TEMPORIZADOR DE RETRASO A LA DESCONEXIÓN En el instante en que la condición se hace verdadera el temporizador se hace verdadero, el registro de tiempo predefinido (TPnn) se carga en el registro de tiempo actual o palabra de cuenta (TWnn), en el momento que la condición se haga falsa TWnn empieza a decrecer y llega éste a cero. El temporizador se hace cero, si por alguna circunstancia la condición se hace verdadera antes de haber transcurrido el tiempo predefinido, entonces el temporizador no se hará cero. En la tabla 3.10 se puede apreciar el funcionamiento de este temporizador. Operando Temporizador de retraso a la desconexión bit Identificador TOFF Sintaxis TOFFnn Parte Condicional Ejemplo Ejecutiva Tabla 3.11 Direccionamiento de temporizador de retraso a la desconexión. 100 3.5.5 CONTADORES Todos los PLC’s de FESTO ofrecen la posibilidad de ser programados como contadores incrementales o decrementales en diagrama de escalera. Además, cada elemento del contador puede ser accesado directamente. Similarmente, todas las palabras de los operandos pueden ser utilizados para contar a excepción de las palabra de entradas y las palabras de tiempo actual. Para permitir flexibilidad en la programación de contadores, el diagrama de escalera de FESTO ofrece los siguientes operandos para contadores: La palabra de cuenta (Counter Word-CWnn-) es el operando en el cual el valor actual es guardado y este es cambiado con cada pulso de cuenta. La palabra de cuenta debe reiniciarse al inicio de la operación de cuenta. La palabra de preselección (Counter Preselect-CPnn-) es el operando en el cual el valor nominal es guardado. Bobina del contador (Cnn) es el operando en el cual se realizan las operaciones de cuenta hacia arriba o hacia abajo por medio de flancos de subida. Contacto del contador (Cnn) es el operando en el cual es guardado el estado del contador, si el valor de CWnn es menor al valor de TPnn el contacto del contador es verdadero. 101 Operando Contador bit Identificador C Sintaxis Cnn Parte Condicional Ejemplo Ejecutiva Tabla 3.12 Direccionamiento de contador. 3.5.6 FUNCIONES LÓGICAS Las funciones lógicas son sin lugar a duda la parte básica para realizar un programa, en gran medida el conocimiento de ellas representa la diferencia entre hacer un programa eficiente y hacer un programa largo e inútil. 3.5.6.1 FUNCIÓN NOT La función NOT puede ser asignada para señales de entrada o señales de salida, en el caso de señales de entrada, la función NOT es similar a utilizar un contacto normalmente cerrado de un relevador eléctrico. Fig. 3.35 Función NOT de entrada. 102 Fig. 3.536 Función NOT de salida. 3.5.6.2 FUNCIÓN OR La función OR no es más que tener contactos en paralelo, en esta función con que uno de los operandos sea igual a uno la función se hace uno. Para que la función sea igual a cero, todos los operandos deberán ser igual a cero. Fig. 3.37 Función OR. 3.5.6.3 FUNCIÓN AND La función AND no es más que tener contactos en serie, en esta función todos los operandos deben ser igual a uno para que la función sea igual a uno. Para que la función sea igual cero, solo basta con que uno de los operandos sea igual a cero. Fig. 3.38 Función AND. 103 3.5.6.4 FUNCIÓN OR EXCLUSIVA La función OR exclusiva es más elaborada que las funciones anteriores, sin embrago sigue siendo una combinación de contactos abiertos y cerrados utilizando las funciones NOT, OR y AND. La función OR exclusiva es verdadera cuando uno y solo uno de los operandos es uno. En el caso que dos o más operandos sea igual a uno la función es igual a cero. Fig. 3.39 Función OR exclusiva. 3.5.7 BOBINAS Las bobinas son utilizadas para modificar el estado de los operandos de bit en la parte ejecutiva del escalón. Existen cuatro instrucciones de bobina, el SET, el RESET, la asignación y la asignación negada. 3.5.7.1 SET La instrucción de SET energiza retentivamente a una bobina, en el momento que el escalón se hace igual a uno la instrucción de SET coloca en valor uno a la bobina y aunque posteriormente el escalón tome el valor de cero la bobina queda con el valor de uno. La manera de colocar a cero la bobina es utilizando la instrucción de RESET. 104 Fig. 3.40 Instrucción de SET. 3.5.7.2 RESET Cuando previamente una bobina fue puesta en valor uno mediante la instrucción de SET, la función de RESET es necesaria para lograr poner en cero a dicha bobina. Si no se utiliza la instrucción de RESET la bobina quedará siempre con el valor de uno. Fig. 3.41 Instrucción de RESET. Las instrucciones de SET y RESET son utilizadas cuando es necesario memorizar el estado momentáneo del escalón, por ejemplo cuando se quiere arrancar y parar un motor con un solo botón pulsador. 3.5.7.3 ASIGNACIÓN A diferencia del SET que memoriza el estado del escalón cuando este se hizo verdadero, la asignación continuamente sigue al estado actual del escalón, es decir, si el escalón es igual a uno la bobina asignada es igual a uno, si el escalón es cero la bobina es cero. Como regla general solo debe existir una asignación por bobina en todo el programa y si se tiene asignación no se debe tener SET, RESET o asignación negada de la misma bobina en todo el programa. 105 Fig. 3.42 Asignación. 3.5.6.4 ASIGNACIÓN NEGADA La asignación negada es similar a la asignación, con la única diferencia de que cuando el escalón es uno la bobina es cero y cuando el escalón es cero la bobina es uno. La regla general de asignación es aplicada también para la asignación negada, por lo que sí existe una asignación negada de una bobina ya no debe existir una asignación, un SET o un RESET. Fig. 3.43 Asignación negada. 3.5.7 PROGRAMAS Los programas son las rutinas, en las cuales el usuario desarrolla la lógica de comportamiento del PLC ante los diferentes eventos que suceden en la operación del sistema de control. El primer programa que se debe realizar es el programa 0, ya que el PLC siempre buscará a este programa cuando arranque, si no existe este programa el PLC se pondrá en modo de fallo. Desde los programas se pueden llamar a otros programas, a módulos de programa o módulos de funciones. El total de programas que se pueden realizar son 64 (P0 a P63). 106 3.6 PROGRAMACIÓN EN DIAGRAMA DE ESCALERA En este apartado veremos cuál es la estructura de programación en LDR (Ladder Diagram), esto con el fin de tener las bases suficientes para poder entender las diferencias de programación respecto al listado de instrucciones. 3.6.1 CONCEPTO DE ESCALÓN Un escalón (rung) es la parte más simple del diagrama de escalera, el diagrama de escalera es una imagen del diagrama de circuito alemán, pero se lee siempre de izquierda a derecha. Fig. 3.44 Escalón. El diagrama de escalera se compone de escalones, ramas paralelas, contactos, cajas, bobinas y bobinas paralelas. Una caja puede ser usada para reemplazar un contacto o una bobina. Las cajas son usadas por funciones que son difíciles o imposibles de representar en el diagrama de escalera, por ejemplo una operación aritmética. Las ramas paralelas pueden ser insertadas en cualquier lugar del escalón y las bobinas paralelas se insertan a la derecha del escalón. Fig. 3.45 Ramas y bobinas paralelas. 107 Los escalones contienen operaciones y no son más que uniones lógicas de elementos binarios. Cada operación que puede ser un contacto, cajas y/o bobinas requieren de un operando. Si el operando no se encuentra, el WinFST rechaza el programa, marca los errores y no carga el programa en el PLC. El WinFST es el software de FESTO para editar, compilar y cargar los programas de PLC. Cada operación tiene un lugar asignado para los operandos. 3.6.2 PROCESO EN LOS ESCALONES Los escalones están numerados. La numeración se lleva a cabo en forma automática. Por esta razón es clara la secuencia de los escalones. Antes de la carga del programa en diagrama de escalera en el PLC, el programa es trasladado al código de máquina usado por el PLC. Los escalones son trasladados consecutivamente en su número de secuencia. Incluso dentro del escalón, el código de la máquina usa la secuencia programada por el usuario. Es por eso que una segunda bobina en un escalón aparecerá en segundo sitio en el código de la máquina. Como vimos anteriormente, el programa es ejecutado estrictamente en secuencia. Cuando se enciende el PLC o se inicia el programa con el switch de RUN, el programa inicia con las operaciones del primer escalón. Es por esto que el programador sabe siempre que instrucciones se ejecutarán primero. Como todas las operaciones lógicas o booleanas, los escalones pueden ser divididos en una parte condicional y una parte ejecutoria. La parte condicional contiene las condiciones para que la acción sea dada; la parte ejecutoria contiene la acción que se llevará a cabo si la parte condicional es verdadera. 108 3.7 PROGRAMACIÓN EN LISTADO DE INSTRUCCIONES El lenguaje STL (Statement List) le permite al programador resolver tareas de control utilizando instrucciones simples en inglés para describir la operación deseada del controlador. La naturaleza modular del lenguaje le permite al programador resolver tareas complejas de una manera eficiente y documentada. 3.7.1 ELEMENTOS DE STL 3.7.1.1 STEP Cuando el STEP se utiliza como paso: A pesar de que el uso de la instrucción STEP es opcional, la mayoría de los programadores la utiliza. La instrucción STEP se utiliza para marcar el comienzo de un bloque lógico de código de programa. Cada programa en STL puede contener 255 pasos. Cada paso puede contener una o varias frases. Se le puede asignar a cada paso de manera opcional una etiqueta o nombre. Sólo se requiere una etiqueta de paso cuando algún otro paso haga referencia al primero por medio de una instrucción de salto. Cuando el STEP se utiliza como instrucción: En su forma más simple, una instrucción STEP incluye al menos una Frase. STEP (Etiqueta). La etiqueta puede ser de hasta 8 caracteres alfanuméricos Es importante entender que el programa esperará en este paso hasta que las condiciones sean verdaderas y hasta entonces se llevarán a cabo las acciones. Sólo hasta entonces el programa avanzará al siguiente paso. 109 3.7.1.2 FRASE La frase forma el nivel más básico dentro de la organización del programa. Cada frase está compuesta de una parte condicional y una parte ejecutoria. Parte condicional Parte ejecutoria La parte condicional para listar una o más condiciones que tienen que ser evaluadas al momento de la ejecución ya sea como verdaderas o falsas. Esta es la sección de la frase donde se activan las salidas siempre que la parte condicional haya sido evaluada como verdadera. Esta parte comienza regularmente con la instrucción IF (si condicional) y continúa con una o varias frases las cuales describen las condiciones que serán evaluadas. Si las condiciones resultan verdaderas, entonces se llevarán a cabo todas las acciones programadas en la parte ejecutoria. Tabla 3.13 Características de la parte condicional y ejecutoria de una frase. Cuando se emplea una sola frase: STEP Start. Etiqueta de hasta 8 caracteres alfanuméricos. El programa ejecutará el primer paso, STEP Start. Si la condición I0.0 es verdadera, entonces efectuará la parte ejecutoria (Set O0.0) y procederá con el siguiente paso, STEP Stop. Si la condición es falsa, esperará en el paso Start. (Con formato en Inglés) Cuando se emplean varias frases: Si la parte condicional de la primera frase es verdadera, entonces se realizará la parte ejecutoria y continuará con la segunda frase. Si no es verdadera, procederá con la segunda frase sin realizar ejecución alguna. No se espera en la primera frase. 110 Si la parte condicional de la segunda frase es verdadera, entonces se llevará a cabo la parte ejecutoria y procederá con la tercera frase. Si no es verdadera, entonces procederá con la tercera frase sin hacer ejecución alguna. No se espera en la segunda frase. Si la parte condicional de la tercera frase es verdadera, entonces se realizará la parte ejecutoria y procederá con el siguiente paso. Si no es verdadera, procederá con la primera frase, la segunda frase y la tercera frase y quedará encerrado en el mismo paso. Generalmente, sólo cuando la última frase del paso es verdadera, se procederá con el siguiente paso. 111 3.7.2 COMANDOS UTILIZADOS EN STL Los siguientes comandos son algunos de los más utilizados en el lenguaje de listado de instrucciones entre los cuales se dividen en dos principales grupos: instrucciones de transferencia y funciones lógicas. Instrucción STEP IF THEN SET RESET JMP TO (Etiqueta de paso) NOP OTHRW Descripción Se utiliza para marcar el comienzo de un bloque lógico de un código de programa. Instrucción que marca el comienzo de la parte condicional de la frase. Instrucción que marca el inicio de la parte ejecutiva de la frase. Se utiliza para cambiar al estado lógico “1”de operandos. Se utiliza para cambiar al estado lógico “0” de operandos. Hace que la ejecución del programa continúe al paso cuya etiqueta se ha especificado. Una instrucción especial la cual siempre es verdadera en la parte condicional de la frase. En la parte ejecutiva es equivalente a “no hagas nada”. Permite continuar con la ejecución del programa aun cuando la parte condicional de la frase sea falsa. Tabla 3.14 Instrucciones de transferencia. Instrucción AND AND N OR OR N N Descripción Efectúa la función lógica AND entre operandos y constantes. Efectúa la función lógica AND N entre operandos y constantes Efectúa la función lógica OR entre operandos y constantes Efectúa la función lógica OR N entre operandos y constantes Es la función negación. Le permite invertir una condición de entrada. Tabla 3.15 Instrucciones lógicas. 112 CAPÍTULO 4 PROGRAMACIÓN DEL PLC Y APLICACIÓN CON ELECTROHIDRAÚLICA 113 4.1 PASOS PARA PROGRAMAR EN Win FST a) Inicio del software Win FST. Al iniciar el software Win FST observará la siguiente pantalla: b) Creación de un nuevo proyecto. • De clic en [File], [New Project]. • La ventana de diálogo aparecerá con el signo “?” en el campo para la introducción del nombre. 114 • Introduzca el nombre de su proyecto. • De un clic en [OK]. • Una nueva ventana de diálogo aparecerá para que introduzca los ajustes del proyecto. • Escoja el tipo de controlador en base al que esté utilizando. • Tal vez desee añadir un comentario para el proyecto. Sin embargo, no es necesario. • De un clic en [OK]. • Será llevado a la ventana principal con una nueva ventana (“Project Tree”) en la parte superior izquierda. • Es allí donde se lleva a cabo la navegación por todo el proyecto. 115 c) Declaración de variables. • Necesita declarar las variables que utilizará en su programa. • Esto se hace en “Lista de Asignaciones” (“Allocation List”). • De un doble clic en la opción “Allocation List” del árbol del proyecto. • Aparecerá una nueva pantalla con tres encabezados: “Operand” es la dirección absoluta que reconoce el PLC de las entradas y las salidas. “Symbol” es el operando simbólico familiar para el programador. “Comment” son los comentarios acerca del operando en cuestión. • Los operandos simbólicos y los comentarios son opcionales; sin embargo se aconseja definirlos con el fin de documentar al proyecto. • Para insertar una variable de un clic derecho, y de un clic en [Insert Operand]. • Otra manera es presionando la tecla [Insert]. Es importante antes de realizar la lista de asignaciones escoger el PLC que se va a emplear. • De un doble clic en “IO Configuration” en la lista del árbol del proyecto. • Aparecerá una ventana de diálogo. 116 • La pantalla estará en blanco. • Mueva al ratón a la pantalla y de un clic derecho. • De un clic en “Insert IO Module”. • Una nueva ventana de diálogo aparecerá. • Escoja el PLC que esté empleando. • De un clic en “OK”. • Cierre la ventana. d) Creación y escritura del Programa. • Hay varias formas de crear un programa. • De clic en [Insert], [New Program] o [Program], [New]. • O puede dar un clic en el botón derecho del ratón en “Program” y dar un clic en “Insert Program”. • Una ventana de diálogo aparecerá. • En esta ventana se podrá elegir el lenguaje de programación que se desea utilizar ya sea “Statement List” o “Ladder Diagram”. En seguida al escoger alguna opción aparecerá esta ventana. 117 • En esta ventana se pondrá el número de programa y la versión, es importante tener en cuenta que se debe empezar por el número cero y en cada número se pueden crear 9 versiones. • El nuevo programa que ha creado aparecerá bajo la carpeta “Program” en el árbol del proyecto. • De un doble clic en el programa que creó. • Se abrirá una ventana de programación. • Junto con la ventana de programación, aparecerá una ventana de “Shortcuts” para auxiliarle. • Puede introducir los comandos por el teclado o bien utilizar el menú de comandos. 118 • Puede introducir los operandos por el teclado o por el botón derecho del ratón y utilizar la opción “Insert Operand”. La ventana de la lista de asignaciones aparecerá. Después de escribir el programa, puede verificarlo con el fin de detectar y corregir los posibles errores de sintaxis y de direccionamiento. Con esta función, es posible eliminar dichos errores antes de cargar el programa. • De un clic en su programa en el navegador del proyecto. • Su programa debe estar abierto y con la ventana del editor activa. • De un clic en el ícono “Compile Active Module” o pulse [Ctrl] + [F7]. e) Compilación y construcción del programa. Antes de cargar su programa al PLC, tiene que compilar y construir su programa. Recuerde que esto es diferente que compilar el programa, ya que esta segunda opción le construye todo el proyecto con todos los drivers, etc. • De un clic en el ícono “Make Project” o pulse la tecla [F7]. • Este ícono se utiliza para compilar cualquier cambio efectuado. • Cuando de un clic en el ícono “Build Project”, se reconstruirá todo el proyecto. • Se recomienda construir su proyecto al menos una vez antes de realizar la carga. f) Carga del programa. • Conecte su PC al PLC con el cable de interfaz. • Después de construir su proyecto y de configurar su controlador entonces podrá descargar su programa. • De un clic en el ícono “Download Project” o presione la tecla [F5]. • Aparecerá una ventana de diálogo, una vez que la carga se haya completado y si no existe algún error. 119 • Ejecute el programa moviendo el interruptor de Stop a Run. g) Monitoreo en línea. • Puede ir a la opción “Online” para monitorear al programa que se esté ejecutando o para monitorear los operandos. • De un clic derecho en la opción “Program” en el árbol del proyecto y de un clic en la opción “Online”, la ventana de su programa se abrirá y estará en condiciones de ver cómo se ejecuta su programa. • Puede conmutar entre el modo “Editor” y el modo “Online” en cualquier momento. • Para ir a modo en línea y ver los operandos, de un clic en el ícono “Online Display”. • Note que puede forzar las salidas dando un clic a los bits respectivos. • Sin embargo, sea cuidadoso cuando force dichas variables, asegúrese de no ocasionar que su equipo afecte a otro equipo. • También recuerde desactivar todas las salidas una vez que haya terminado. 120 h) Respaldo y recuperación de Proyectos. Durante su trabajo de programación, seguramente requerirá respaldar y recuperar sus proyectos. Para respaldar un proyecto: • De un clic [Project]. • De un clic en [Backup]. • Elija el proyecto que requiere respaldar. • De un clic en [OK]. • Elija el lugar en donde desee respaldar al proyecto. • De un clic en [Save]. Para recuperar un proyecto: • De un clic en [Project]. • De un clic en [Restore]. • Elija el archivo que desee recuperar. • De un clic en [Open]. • De un clic en [OK]. • El proyecto se recuperará en la carpeta de Proyectos. Para salir del programa: • De un clic en [Project]. • De un clic en [Exit]. • Si el proyecto no ha sido guardado, se le solicitará. A continuación se plantean cuatro prácticas, en donde se aplicará cada uno de los conceptos adquiridos a lo largo de este documento para tener una mejor visión de las aplicaciones que se le dan en forma cotidiana. 121 UNIVERSIDAD VERACRUZANA FACULTAD DE INGENIERIA MECÁNICA Y ELÉCTRICA XALAPA, VER. LABORATORIO DE AUTOMATIZACIÓN INDUSTRIAL PRACTICA Nº 1 ESTACIÓN ELEVADORA Descripción: Las cajas procedentes de una cinta transportadora han de ser elevadas sobre una cinta de embalaje por medio de una mesa elevadora. Al oprimir el botón de inicio sale el cilindro y al llegar al final de carrera regresa automáticamente, el avance puede regularse mediante una válvula reguladora de caudal. Contará con válvula reguladora de presión. Plano de situación: 122 Diagrama de potencia: Diagrama espacio-fase: Ecuación de movimientos: A+A- 123 Material a utilizar: Unidades 1 1 1 1 2 1 1 1 1 1 2 Descripción Control lógico programable Cable de unión con grupo hidráulico Unidad de conexión Grupo hidráulico Interruptores de proximidad tipo rodillo Cilindro de doble efecto Electroválvula 3/2 vías de una bobina Entrada de señales eléctricas Válvula limitadora de presión Válvula reguladora de caudal Manómetro Listado de asignaciones: Entradas Absoluto I0.0 I0.1 I0.2 Salidas Simbólico BOTON S1 S2 Absoluto O0.0 - Simbólico Y14 - 124 Diagrama de escalones: Listado de instrucciones: STEP 1 IF THEN AND SET STEP 2 IF THEN RESET JMP TO 1 BOTON S1 Y14 S2 Y14 'BOTON DE INICIO 'SENSOR DEL CILINDRO RETRAIDO 'ELECTROVALVULA 'SENSOR DEL CILINDRO EXTENDIDO 'ELECTROVALVULA 125 UNIVERSIDAD VERACRUZANA FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA XALAPA, VER. LABORATORIO DE AUTOMATIZACIÓN INDUSTRIAL PRACTICA Nº 2 DISPOSITIVO DE PRENSAR Descripción: Con un dispositivo de introducción a presión han de ensamblarse piezas. Al sobrepasar la presión de prensado de 30 bars, debe retroceder el émbolo por razones de seguridad. En el prensado correcto, la carrera de retroceso tiene lugar automáticamente al alcanzarse los 30 bars ajustados en el presostato. Plano de situación: 126 Diagrama de potencia: Diagrama espacio-fase: Ecuación de movimientos: A+A- 127 Material a utilizar: Unidades 1 1 1 1 1 1 1 2 1 1 1 2 Descripción Control lógico programable Cable de unión con el grupo hidráulico Unidad de conexión Grupo hidráulico Cilindro de doble efecto Electroválvula 4/2 vías de una bobina Entrada de señales eléctricas Interruptor de proximidad tipo rodillo Válvula limitadora de presión Válvula reguladora de caudal Presostato Manómetro Listado de asignaciones: Entradas Absoluto I0.0 I0.1 I0.2 I0.3 Salidas Simbólico BOTON S1 S2 PRESOST Absoluto O0.0 - Simbólico Y14 - 128 Diagrama de escalera: Listado de instrucciones: STEP 1 IF THEN AND SET STEP 2 IF THEN AND RESET JMP TO 1 BOTON S1 Y14 'BOTON DE INICIO 'SENSOR DE CILINDRO RETRAIDO 'ELECTROVÁLVULA S2 PRESOST Y14 'SENSOR DE CILINDRO EXTENDIDO 'PRESOSTATO 'ELECTROVÁLVULA 129 UNIVERSIDAD VERACRUZANA FACULTAD DE INGENIERIA MECÁNICA Y ELÉCTRICA XALAPA, VER. LABORATORIO DE AUTOMATIZACIÓN INDUSTRIAL PRACTICA Nº 3 DISPOSITIVO DE MONTAJE Descripción: En un dispositivo de montaje se introducen piezas a presión. A fin de obtener una introducción segura y de respetar la sucesión de introducción, el cilindro B debe avanzar solamente, si el cilindro A ha alcanzado la presión ajustada. Las velocidades de introducción a presión de los cilindros A y B deben ser ajustables. Con el grupo desconectado no debe descender el cilindro A. Ambos cilindros deben retroceder solamente por accionamiento del conmutador de retroceso. La posición del conmutador de retroceso enclavado quedará indicada ópticamente. Plano de situación: 130 Diagrama de potencia: Diagrama espacio-fase: Ecuación de movimientos: A+B+AB- 131 Material a utilizar: Unidades 1 1 1 1 1 1 1 1 4 1 2 1 1 2 Descripción Control lógico programable Cable de unión con el grupo hidráulico Unidad de conexión Grupo hidráulico Cilindro de doble efecto Electroválvula 4/2 vías de una bobina Electroválvula 4/3 vías, centro cerrado de dos bobinas Entrada de señales eléctricas Interruptor de proximidad tipo rodillo Válvula limitadora de presión Válvula reguladora de caudal Válvula antirretorno pilotada Presostato Manómetro Listado de asignaciones: Entradas Absoluto I0.0 I0.1 I0.2 I0.3 I0.4 I0.5 Salidas Simbólico BOTON SA0 SA1 SB0 SB1 PRESOST Absoluto O0.0 O0.1 O0.2 - Simbólico Y14 Y12 Y24 - 132 Diagrama de escalera: Listado de instrucciones: STEP 1 IF THEN AND AND SET RESET BOTON SA0 SB0 Y14 Y12 'BOTON DE INICIO 'SENSOR DE CILINDRO "A" RETRAIDO 'SENSOR DE CILINDRO "B" RETRAIDO 'ELECTROVÁLVULA "A" 'ELECTROVÁLVULA "A" AND AND SET SA1 SB0 PRESOST Y24 'SENSOR DE CILINDRO "A" EXTENDIDO 'SENSOR DE CILINDRO "B" RETRAIDO 'PRESOSTATO 'ELECTROVÁLVULA "B" SA1 SB1 Y14 Y12 Y24 'SENSOR DE CILINDRO "A" EXTENDIDO 'SENSOR DE CILINDRO "B" EXTENDIDO 'ELECTROVÁLVULA "A" 'ELECTROVÁLVULA "A" 'ELECTROVÁLVULA "B" STEP 2 IF THEN STEP 3 IF THEN AND RESET SET RESET JMP TO 1 133 UNIVERSIDAD VERACRUZANA FACULTAD DE INGENIERIA MECÁNICA Y ELÉCTRICA XALAPA, VER. LABORATORIO DE AUTOMATIZACIÓN INDUSTRIAL PRACTICA Nº 4 DISPOSITIVO ELEVADOR PARA PAQUETES Descripción: Los paquetes llegan por un camino de rodillos y son elevados por el cilindro A. A continuación el cilindro B, empuja los paquetes, después de esto retrocede el cilindro B, y 1s después regresa el cilindro A y se puede repetir el ciclo mediante un botón de inicio de ciclo, se hará el ciclo automáticamente para 10 paquetes y se deberá oprimir el botón de inicio para otro ciclo. Plano de situación: 134 Diagrama de potencia: Diagrama espacio-fase: Ecuación de movimientos: A + B + B -t A - 135 Material a utilizar: Unidades 1 1 1 1 1 1 1 1 4 1 2 1 2 Descripción Control lógico programable Cable de unión con el grupo hidráulico Unidad de conexión Grupo hidráulico Cilindro de doble efecto Electroválvula 4/2 vías de una bobina Electroválvula 4/3 vías, centro cerrado de dos bobinas Entrada de señales eléctricas Interruptor de proximidad tipo rodillo Válvula limitadora de presión Válvula reguladora de caudal Presostato Manómetro Listado de asignaciones: Entradas Absoluto I0.0 I0.1 I0.2 I0.3 I0.4 Salidas Simbólico BOTON SA0 SA1 SB0 SB1 Absoluto O0.0 O0.1 O0.2 - Simbólico Y14 Y12 Y24 - 136 Diagrama de escalera: 137 Listado de instrucciones: STEP 1 IF THEN BOTON C0 V10 CP0 C0 'BOTON DE INICIO 'CONTADOR AND AND SET RESET C0 SA0 SB0 Y14 Y12 'CONTADOR 'SENSOR DE CILINDRO "A" RETRAIDO 'SENSOR DE CILINDRO "B" RETRAIDO 'ELECTROVÁLVULA "A" 'ELECTROVÁLVULA "A" AND SET SA1 SB0 Y24 'SENSOR DE CILINDRO "A" EXTENDIDO 'SENSOR DE CILINDRO "B" RETRAIDO 'ELECTROVÁLVULA "B" AND RESET SA1 SB1 Y24 'SENSOR DE CILINDRO "A" EXTENDIDO 'SENSOR DE CILINDRO "B" EXTENDIDO 'ELECTROVÁLVULA "B" AND LOAD TO SET SA1 SB1 V100 TP0 T0 'SENSOR DE CILINDRO "A" EXTENDIDO 'SENSOR DE CILINDRO "B" EXTENDIDO T0 SA1 SB0 Y14 Y12 'TEMPORIZADOR 'SENSOR DE CILINDRO "A" EXTENDIDO 'SENSOR DE CILINDRO "B" RETRAIDO 'ELECTROVÁLVULA "A" 'ELECTROVÁLVULA "A" AND LOAD TO SET N STEP 2 IF THEN STEP 3 IF THEN STEP 4 IF THEN STEP 5 IF THEN STEP 6 IF THEN N AND AND RESET SET JMP TO 1 'CONTADOR PRESELECTOR 'CONTADOR 'TEMPORIZADOR PRESELECTOR 'TEMPORIZADOR 138 CONCLUSIONES Durante el desarrollo de este documento se ha comprendido la hidráulica, como una técnica utilizada en diversos procesos automatizados. Al mostrar sus principios esenciales de funcionamiento y los elementos que se emplean. Es muy importante mencionar que en esta técnica su fluido principal es el aceite. Se debe tener en cuenta las características de éste, tales como: viscosidad, punto de inflamación, untuosidad, entre otras. Para tener un óptimo desempeño del aceite es necesario el uso de aditivos, en algunos casos para mejorar sus propiedades, y la elección correcta de qué tipo de aceite se empleará dependiendo de las condiciones de operación. En lo que se refiere a los componentes hidráulicos como: depósito de aceite, bombas, motores, las diversas válvulas y cilindros. Se debe considerar el caudal, sea fijo o variable, y la presión en la que operará el sistema hidráulico ya que para garantizar un funcionamiento seguro debe tenerse en cuenta los valores de presión mínima y máxima permisible para todos los componentes. En cuanto al PLC se conoció su arquitectura interna, las funciones que desempeña y las diferencias entre algunos modelos como: el FEC Compacto y FEC Standard. También tener el debido cuidado en la forma en que se programará, ya que de ello depende el uso correcto de los elementos de trabajo y que el proceso automatizado se realice eficientemente. Al terminar la lectura de este documento se podrá observar que el control electrohidráulico mediante el PLC no es tan complicado, al comprender los conceptos básicos de funcionamiento tanto de la hidráulica como del PLC. 139 BIBLIOGRAFÍA LIBROS Balcells, Josep & Romeral, José Luis Autómatas Programables Alfaomega, 1998 Serrano Nicolás, Antonio Oleohidráulica Mc Graw Hill, 2002 Carnicer Royo, Enríque Oleohidráulica: Conceptos Básicos Paraninfo/Thomson, 2000 Martínez Sánchez, Victoriano Á. Potencia Hidráulica Controlada Por PLC Alfaomega, 2009 Creus Solé, Antonio Neumática e Hidráulica Alfaomega, 2007 Gasper, Edward El Lenguaje De Programación. Win FST 4.10 Para PLC´s FESTO Didactic GmbH & Co., 2002 PÁGINAS WEB http://es.scribd.com/doc/56774982/Manual-de-Oleohidraulica-Industrial-Vickers http://www.festo-didactic.com http://cursos.aiu.edu/Sistemas%20Hidraulicas%20y%20Neumaticos/PDF/Tema%204.pdf http://es.scribd.com/doc/44756519/Simbolos-ISO1219 http://www.itescam.edu.mx/principal/sylabus/fpdb/recursos/r69439.PDF 140
 0
0
Anuncio
Documentos relacionados

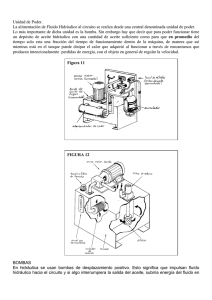







Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados