http://es.wikipedia.org/wiki/La_escuela_de_ Atenas#mediaviewer
Anuncio

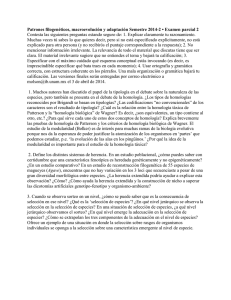
http://es.wikipedia.org/wiki/La_escuela_de_ Atenas#mediaviewer/Archivo:La_scuola_di_Atene.jpg Euclides, Πλάτων y Poincaré Jerson Borja Camilo Rengifo Euclides, Πλάτων y Poincaré Jerson Borja M. Sc. Asistente graduado doctoral del Deparamento de Matemáticas de la Universidad de los Andes [email protected] Camilo Rengifo M. Sc. Asistente graduado doctoral del Deparamento de Matemáticas de la Universidad de los Andes [email protected] Este artículo es un intento de divulgar las matemáticas profesionales mediante la descripción de ciertos subconjuntos de R3, visualmente agradables gracias a sus simetrías, conocidos como sólidos platónicos. Esto nos permitirá introducir las nociones de grupo y de variedad presentes en álgebra y en geometría. En otras palabras, a partir del cálculo del tamaño del grupo de simetrías de rotación del icosaedro podemos enunciar, de una forma ligera, pero formal, una de las conjeturas más famosas del siglo XX, la conjetura de Poincaré, que por casi cien años permaneció como un problema abierto. La organización del texto va de la mano con la historia, en el sentido de que en la tercera y última sección presentaremos la primera versión de la conjetura. Decimos la primera versión de la conjetura, pues esta resulta ser falsa, como veremos más adelante. Claro está que el mismo autor del problema replanteó la pregunta, que se conoció a lo largo del siglo XX como la conjetura de Poincaré. En la primera década del siglo XXI la conjetura fue probada, y su demostración se debe a las contribuciones del matemático ruso Grigori Perelman (1966). Como mencionamos arriba, el texto consta de tres secciones. En la primera recordaremos los sólidos platónicos y algunas de sus propiedades. En la segunda, un poco más formal, introduciremos de forma intuitiva dos objetos matemáticos, el primero, un grupo finito no conmutativo, mientras que el segundo objeto es un concepto geométrico que necesitamos discutir para entender el contenido de los ejercicios propuestos por Poincaré en [4, 5]. En la tercera sección presentaremos las dos versiones de la conjetura en cuestión y explicaremos por qué la primera es falsa [3]. No sobra decir que cualquier tipo de demostración queda por fuera de los intereses del presente documento. Así pues, estimados, ¡no se dejen ganar por la pereza de leer las siguientes secciones! Los autores agradecen la ayuda de varios estudiantes del Departamento de Matemáticas de la Universidad de los Andes, pues sin su colaboración el presente artículo sería todavía una idea más bien platónica que euclidiana. Sus nombres son Juan Sebastián Osorio, Tovías Castro y Juan Camilo Arias. LOS CINCO SÓLIDOS PLATÓNICOS Siguiendo la opinión de Andreas Speiser (1885-1970), quien estudió en Gotinga, Alemania, con Hilbert, Klein y Minkovski alrededor de 1904, anotamos que el gran logro de Euclides de Alejandría (300 a. C.) en su obra Elementos fue demostrar que solo existen cinco sólidos, conocidos como sólidos platónicos debido a que Platón anteriormente los había mencionado en su diálogo Timeo, que tienen las siguientes propiedades: 74 Hipótesis, Apuntes científicos uniandinos, núm. 16, 2014 Tetraedro • • • Hexaedro Octaedro Todas las caras del sólido son el mismo polígono regular La intersección de dos caras consecutivas es precisamente toda una arista del polígono En cada vértice del sólido se intersecan el mismo número de caras, es decir, en cada vértice se encuentra el mismo número de aristas El trabajo de Euclides es tan valioso, entre otras cosas, porque usando el lenguaje actual de las matemáticas soluciona el problema de la clasificación de los sólidos en R3 con las propiedades mencionadas anteriormente. La construcción euclidiana, bien conocida por los geómetras a lo largo de la historia, consta de la demostración de los siguientes cuatro numerales: 1. Cada vértice del sólido tiene por lo menos tres caras que se encuentran en él 2. En cada vértice del sólido, para las caras que se encuentran en él, la suma de los ángulos formados por aristas consecutivas es menor a 360 ° 3. Los ángulos de cada cara del sólido son todos iguales y no deben ser mayores de 120 ° 4. Los polígonos regulares de seis o más lados tienen ángulos que miden 120 ° o más Así que del argumento de Euclides se tiene que las posibles caras para los sólidos platónicos son triángulos equiláteros, cuadrados o pentágonos regulares. Como ejercicio, dejamos al lector que compruebe que en un pentágono regular cada ángulo mide 108 °. Por otro lado, gracias a los aportes de Euler (1707-1783), el matemático más prolífico de todos los tiempos, tiene sentido estudiar los sólidos platónicos desde un punto de vista combinatorio. Para cada sólido platónico tenemos un número denominado la característica de Euler, que es 2: Dodecaedro Icosaedro Tabla 1. Vertices (V) Aristas (A) Caras (C) {p, q} Tetraedro 4 6 4 {3, 3} Hexaedro 8 12 6 {4, 3} Octaedro 6 12 8 {3, 4} Dodecaedro 20 30 12 {5, 3} Icosaedro 12 30 20 {3, 5} Con la ayuda de la tabla anterior es fácil ver que cada sólido platónico cumple con la siguiente ecuación pC = 2A = qV Por lo tanto, al combinar la característica de Euler y la última ecuación tenemos las siguientes dos ecuaciones y desigualdad 2A − A + 2A = 2, q p 1 + 1 = 1 + 1 ,A>0 q p 2 A 1 + 1 > 1 , p, q ≥ 3. q p 2 Entonces, las únicas posibilidades para p, q son {3,3}, {4,3}, {3,4}, {3,5} y {5,3}, y obtenemos así otra forma de clasificar los sólidos platónicos, bien conocida en topología algebraica. Con los símbolos de Schläfli a la mano, podemos definir otra propiedad, conocida como dualidad entre los sólidos platónicos, que corresponde a intercambiar el número p con el número q, como lo vemos en la siguiente figura: V−A+C=2 Es decir, el número de vértices menos el número de aristas más el número de caras es constante. Además, a cada sólido platónico podemos asignarle dos números, p, igual al número de aristas en cada cara, y q, igual al número de caras que se encuentran en cada vértice, que se conocen como el símbolo de Schläfli, denotado por {p, q}. Dualidad hexaedro–octaedro Universidad de los Andes, Facultad de Ciencias 75 Figura 1. Fragmento de los Elementos de Euclides, escrito en papiro. Fuente: http://es.wikipedia.org/wiki/Geometr%C3%ADa_euclidiana#mediaviewer/Archivo:P._Oxy._I_29.jpg El siguiente diagrama muestra la dualidad entre los sólidos. Nótese que el tetraedro coincide con su sólido dual: {4, 3} hexaedro {5, 3} dodecaedro {3, 3} tetraedro {3, 4} octaedro {3, 5} icosaedro {3, 3} tetraedro En 1813, Cauchy (1789-1857), matemático francés, demostró que todo sólido convexo es rígido [1], es decir, que el sólido no cambia (es invariante) bajo rotaciones y reflexiones en R3. Experimentalmente, pensando en que cada sólido convexo es un dado, el lector puede dar fe de que el resultado de hacer dos rotaciones consecutivas es de nuevo una rotación, y que para cualquier rotación del dado existe otra rotación que hace lo contrario; es decir, las simetrías forman un grupo, en el sentido que formalizaremos en la tercera sección. Como muestran las figuras, los sólidos platónicos son convexos, así que tiene sentido estudiar su grupo de simetrías de rotación. Por ejemplo, el tamaño del grupo de simetrías de rotación del icosaedro, o cualquier otro sólido platónico, se puede calcular contando el total de caras en el cual este se puede apoyar, pensándolo como un dado, para luego multiplicarlo por el número de aristas de cualquier cara. Entonces, el tamaño del grupo de simetrías de rotación del icosaedro es 20 × 3 = 60. Adicionalmente, es claro que el tamaño del grupo de simetrías de los 76 Hipótesis, Apuntes científicos uniandinos, núm. 16, 2014 sólidos platónicos duales entre sí es el mismo. Nótese también que el orden en el que se hacen las rotaciones de cada sólido importa, es decir, el grupo de simetrías de cada sólido platónico es un grupo no conmutativo. DOS OBJETOS MATEMÁTICOS El ingrediente algebraico, A5 El grupo A5, o grupo alternante en cinco letras, es el grupo de permutaciones no conmutativo más pequeño que tiene la propiedad, importante en álgebra, de ser simple.1 Explícitamente, considere la lista ordenada de cinco letras abcde, luego, los elementos que forman A5 son operaciones (permutaciones) sobre la lista abcde que consisten en reordenar dicha lista de acuerdo con la siguiente regla: solo se pueden hacer intercambios de dos posiciones de la lista, y solo está permitido hacerlo un número par de veces. Por ejemplo, el intercambio en la lista de las posiciones 1 y 3 (que da la lista cbade), seguido del intercambio de las posiciones 1 y 5 (de la que resultan dbace), es una operación o elemento perteneciente a A5. Sin embargo, la operación que consiste en intercambiar las posiciones 2 y 5, de lo que resulta la lista aecdb, no pertenece a Recordemos que cada número natural se puede escribir como producto de potencias de números primos, es decir que los números primos generan los naturales N; de modo similar, cualquier grupo se puede generar a partir de grupos simples. 1 A5, pues solo se ha hecho un intercambio. Además, cada operación perteneciente a A5 admite un único inverso, en el sentido de que, dado un posible intercambio de A5, existe otro intercambio que hace la operación contraria anulando el resultado de la operación inicial sobre la lista en cuestión. Luego, A5 es un grupo, en el sentido de que A5 es un conjunto en el que tiene sentido definir una operación binaria dotada de un único elemento neutro y único inverso para cada elemento. Adicionalmente, el grupo A5 es un grupo no conmutativo, es decir, el orden de las operaciones sí altera el resultado. Por ejemplo, la serie de intercambios 3 y 4, 2 y 3, 1 y 5, 1 y 4 genera la siguiente modificación en la lista inicial cdbea. Pero si consideramos los intercambios en el siguiente orden: 1 y 5, 1 y 4, 3 y 4, 2 y 3, la lista que resulta es debca, claramente distinta a la anterior. El tamaño de A5 es, coincidencialmente, 60, así que con paciencia se pueden listar las operaciones permitidas en abcde. Por la teoría de grupos sabemos que ese es el único grupo simple de tamaño 60. Luego, el grupo A5 y el grupo de simetrías de rotación del dodecaedro (o icosaedro) son el mismo. estaba interesado en el estudio de los distintos tipos de huecos de las variedades, debido a que analizando los distintos tipos se puede saber si un objeto es igual a otro. En palabras más técnicas, si un objeto se puede deformar en otro sin romperse. Toro T 2 Una noción de espacio geométrico La superficie del planeta Tierra es el ejemplo clásico para explicar qué se quiere decir cuando un matemático usa la palabra 2-variedad. Es bien sabido que durante algún tiempo, el hombre tenía un sistema de referencia que correspondía con la creencia de que la Tierra era plana. Sin embargo, con el pasar de los siglos algunos hombres de ciencia osaron proponer un modelo en el que la Tierra era redonda, como una naranja, según aprenden los niños en el colegio. Pues bien, desde el punto de vista matemático no está del todo mal pensar que localmente la Tierra es plana; de hecho, nadie podría negarlo, pero globalmente ¡la superficie de la Tierra es elipsoidal! Este es el concepto fundamental que motiva la definición de variedad. Una 2-variedad es un espacio que localmente es plano, como R2. Desde luego, en matemáticas tiene sentido hablar de espacios que locamente son tridimensionales, en el sentido de que ya no son como la superficie de nuestro planeta, sino se parecen a R3: son objetos localmente sólidos que se denominan 3-variedad. Como ejemplo de 2-variedad tenemos la superficie de nuestro planeta, o 2-esfera S 2 x 2 + y 2 + z 2 = 1, y como ejemplo de 3-variedad tenemos la 3-esfera, es decir, una esfera que localmente es una bola rellena, difícil de imaginar, que denotamos por S 3, cuya ecuación es x 2 + y 2 + z 2 + w 2 = 1. Sin embargo, S 3 no se puede dibujar en el espacio, pues está inmersa en cuatro dimensiones, R4. A la hora de estudiar este tipo de objetos geométricos es necesario introducir herramientas algebraicas, combinatorias o analíticas para conocer sus propiedades. Así lo hizo Poincaré, para refutar la primera versión de su conjetura [5]. Homología y Poincaré Antes de escribir la primera versión de la conjetura, es preciso mencionar de dónde sale tal problema. Pues bien, Poincaré Esfera S 2 Como lo vemos en la figura, el toro T 2 tiene dos huecos de dimensión 1, uno interno y uno externo. Además, tiene un hueco de dimensión dos, debido a que este encierra un volumen. De la misma forma, en la esfera S 2 vemos que solo hay un hueco de dimensión dos, debido a que esta también encierra un volumen. Así que la homología del toro es un grupo conmutativo que tiene dos componentes, una que da cuenta de los dos huecos de dimensión uno, y otra debido al de dimensión dos. Análogamente, la homología de la esfera es no nula únicamente para la componente de dimensión dos. Entonces, como las homologías son diferentes, el toro y la esfera no son homeomorfos, en el sentido de que S 2 no se puede deformar en T 2 sin romperse. En pocas palabras, esa es la idea de homología. Poincaré quiso saber si la homología sirve para clasificar objetos en el sentido de que si dos variedades tienen la misma homología, entonces deben ser equivalentes. Por ejemplo, el octaedro tiene la misma homología de la esfera S 2, así que existe una forma de deformar el uno para obtener el otro. La idea monumental que propuso Poincaré para detectar un tipo de hueco en una variedad corresponde a la idea intuitiva del mismo, es decir, un hueco debe ser un obstáculo para recoger todos los lazos que existen. Esta idea lleva a la definición del grupo fundamental en una variedad, el grupo que da cuenta de si los lazos se pueden o no contraer a un punto. A principios del siglo XX ya se conocía el cálculo de la homología de S 3, que Universidad de los Andes, Facultad de Ciencias 77 Figura 2. Henry Poincaré. Fuente: http://commons.wikimedia.org/wiki/File:PSM_V82_D416_Henri_Poincare.png 78 Hipótesis, Apuntes científicos uniandinos, núm. 16, 2014 análogamente a la de S 2 es nula, salvo en dimensión tres. En el caso particular de S 2, es claro que cualquier lazo que dibujemos se puede contraer a un punto, mientras que en el toro hay por lo menos dos lazos que no se pueden contraer. Este fenómeno da cuenta de la relación que existe entre la homología y el grupo fundamental. Nótese que el grupo fundamental de cualquier sólido platónico es nulo, pues cualquier lazo que dibujemos sobre él se puede recoger en un punto. En 1900 Poincaré propuso la siguiente afirmación [4], sin demostración, a la que denominamos primera versión de su conjetura. Si una 3-variedad cerrada tiene la homología de la esfera S3, entonces es necesariamente homeomorfa a S3. Así escrita, esta afirmación no es cierta. Es decir, existe una 3-variedad que es cerrada y tiene homología nula, pero no es homeomorfa a S 3. Como dijimos en la sección anterior, S 3 no se puede dibujar, así que necesitamos algunas herramientas algebraicas para producir el contraejemplo. Cuatro años después, en [5], Poincaré presentó el siguiente contraejemplo que refuta la primera versión de su conjetura. Considere SO(3) el grupo de simetrías de rotación del espacio euclídeo R3, que es una variedad inmersa en R9, y A5 el grupo de simetrías del dodecaedro (icosaedro). Mediante un proceso algebraico se puede demostrar que el espacio cociente SO(3)/A5, es una 3-variedad. Poincaré demostró que SO(3)/A5 tiene la misma homología que la esfera S3, pero tiene grupo fundamental no trivial; además, SO(3)/A5 no es homeomorfa a S 3. Así, conociendo que el grupo fundamental para S 3 es nulo, la primera versión de la conjetura se reformula a manera de pregunta, lo que da pie a la famosa conjetura de Poincaré: Si una variedad 3-dimensional cerrada tiene grupo fundamental nulo y tiene la homología de la esfera S3, ¿debe ser homeomorfa a la 3-esfera? Esta conjetura se convirtió, durante el siglo pasado, en un complicado obstáculo para la clasificación de las variedades 3-dimensionales. Tal labor se inició con el caso más simple, los sólidos platónicos, con una clasificación históricamente correcta, por Euclides de Alejandría en su obra Elementos. • REFERENCIAS [1] Cauchy AL. Recherche sur les polyèdres: premier mémoire. Journal de L’École Polytechnique 1813; 16: pág. 66-86. [2] Euclides. Elementos. Libros X-XIII (228). Editorial Gredos. Biblioteca clásica Gredos. [3] Milnor J. Towards the Poincaré conjecture and the classification of 3-manifolds. Notices of the American Mathematical Society, vol. 50 number 50. 2003. [4] Poincaré H. Second complément à l’analysis situs. Proceedings of the London Mathematical Society. s1 32. Pág. 277308. [5] Poincaré H. Cinquième complément a l’analysis situs. Rendiconti del Circolo Matematico di Palermo. 18. Pág. 45-110. Universidad de los Andes, Facultad de Ciencias 79