Archivos PDF
Anuncio

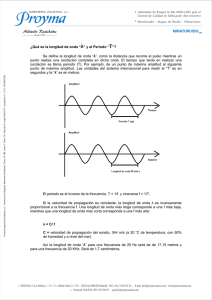
EL SONIDO: BASES FISICAS PARA SU APLICACIÓN EN ECOGRAFIA Conceptos Preliminares Oscilaciones: Se denomina oscilación a la variación periódica de una magnitud física (movimiento de un péndulo, vibración de un diapasón, fenómenos de compresión y descompresión que producen los pistones de un motor, etc). Por lo tanto toda oscilación consta de las siguientes propiedades: a) Naturaleza : que está vinculada al tipo de magnitud física que varía. b) Amplitud: es el rango de variación de la magnitud física c) Período: que es el tiempo que transcurre para que se verifique la oscilación (fig.1) La frecuencia de la oscilación es el número de oscilaciones que se producen en la unidad de tiempo. Cuando esta unidad de tiempo es el segundo, la unidad de frecuencia es el Hertz; es decir que una oscilación que se repite 5 veces en un segundo, tiene una frecuencia de 5 Hertz(Hz). La frecuencia está en relación Fig. 1 inversa con el período, cuando mayor es éste, menor es la frecuencia. Esta relación se expresa matemáticamente con la fórmula 1-1 f = 1 P (1-1) donde : f = frecuencia; P = período. Con respecto a la naturaleza de la oscilación, se reconocen dos formas genéricas: a) Oscilaciones mecánicas b) Oscilaciones electromagnéticas. 137 Dentro de las oscilaciones mecánicas se hallan aquellas que corresponden a magnitudes mecánicas como el movimiento, la presión, los volúmenes, etc. En cambio las electromagnéticas se refieren a variaciones de magnitudes eléctricas y magnéticas: potencial eléctrico, campo eléctrico, campo magnético, etc. Se las denomina electromagnéticas en forma unificada porque los fenómenos oscilatorios magnéticos pueden generar oscilaciones eléctricas en un conductor y, a la inversa, las oscilaciones eléctricas generan campos magnéticos. Son ejemplos de oscilaciones mecánicas : el péndulo, los movimientos de un pistón, los cambios de presión por la vibración de un parlante, etc. Se denomina sistema oscilante al elemento o conjunto de elementos que tienen la capacidad de oscilar. Las oscilaciones pueden producirse por fuerzas internas del sistema oscilante o por fuerzas externas. Un péndulo que es sacado de su posición de equilibrio y liberado, produce movimientos de vaivén en torno a su punto de equilibrio.(fig 2) que son producidos por las fuerzas internas del sistema (gravedad e inercia) Fig 2. El péndulo se halla en posición de equilibrio (izquierda) y es sacado de esta posición(centro). Una vez liberado (derecha), realiza movimientos repetitivos a ambos lados de este punto de equilibrio por efecto de la gravedad y la inercia (fuerzas internas del sistema) con amplitud (recorrido) decreciente hasta alcanzar el equilibrio. A este tipo de oscilación se la denomina oscilación libre. Estas oscilaciones que se producen como resultado de fuerzas internas se denominan oscilaciones libres. Las oscilaciones que se producen como resultado de fuerzas externas al sistema se denominan oscilaciones forzadas ( la oscilación de un pistón por efecto de la fuerza expansiva de una explosión para el caso de motores a explosión, la oscilación de un cristal piezoeléctrico por efecto de una corriente eléctrica, etc.). Estas formas serán descriptas en un apartado espe138 cial debido a las implicancias que tienen como recurso tecnológico en medicina. Concepto de Oscilaciones Armónicas y Armónica: se denominan oscilaciones armónicas a aquellas cuya variación de amplitud en el tiempo responde a las leyes del seno y del coseno. Su representación gráfica es denominada oscilación senoidal y es la que se graficó en la fig.1. La comprensión de este concepto requiere desarrollo trigonométrico, cosa que no es intención hacerlo en este artículo, pero quizás resulte provechoso un ejemplo para su interpretación. Supóngase un cuerpo en movimiento con trayectoria circunferencial y a velocidad constante (fig 3) en el que graficamos las variaciones de su distancia a la horizontal en el eje de la ordenada (eje vertical) y el tiempo en el que a llegado a esa posición en el de las absisas (eje horizontal), observaremos que para cada intervalo de tiempo considerado, la variación de amplitud (distancia a la horizontal) no es la misma sino que responde a los valores del seno del ángulo que forman la horizontal y la línea que une el punto con el centro de la trayectoria circunferencial. Es decir que, aún cuando la velocidad del móvil es contante, la variación de amplitud a intervalos iguales depende del seno del ángulo rec orrido y por lo tanto no son necesariamente iguales. Es decir que este tipo de oscilación responde a la ley del seno. Fig. 3. El objeto que se moviliza siguiendo la trayectoria circunferencial siguiendo el sentido antihorario (ver flecha de sentido de giro), pasa sucesivamente por las posiciones p1 a p9. Si el movimiento es de velocidad constante el tiempo que demanda en alcanzar cada una de las posiciones es proporcional al ángulo que forma la horizontal con el radio tendido a dicha posición, que se halla identificados con una letra griega. No todas las excursiones en el eje vertical tienen la misma amplitud a igual ángulo recorrido. Por ejemplo : en la posición p3 el móvil ha recorrido un ángulo de aproximadamente 45 grados y la amplitud de la excursión es la que corresponde a la longitud de la línea c, que representa el seno del ángulo; al continuar su trayectoria, el objeto alcanza la posición p4 al recorrer 90 grados, y su excursión sobre la vertical es la longitud de la línea d (representada sobre la curva de la derecha por el punto 4) que corresponde al seno de 90 grados. Observe que el tiempo necesario para alcanzar la posición p4 es el doble que el necesario para alcanzar la p3, en cambio la excursión sobre la vertical no es el doble sino que, en cada caso, corresponde al seno del ángulo recorrido, es decir que cumple con la ley del seno y por lo tanto la gráfica de la derecha representa una oscilación armónica y recibe el nombre de oscilación senoidal. 139 Esto significa que las oscilaciones armónicas son oscilaciones senoidales. Como se ha descripto al desarrollar la oscilación en el péndulo, la amplitud de las mismas, desde el momento en que es liberado, disminuye progresivamente hasta alcanzar nuevamente el punto de equilibrio, es decir que su representación en el sistema de coordenadas amplitud - tiempo será la que se observa en la figura 4. A este fenómeno se lo denomina oscilación 1 amortiguada y está determinado por la fuerzas de rozamiento que se generan durante el movimiento. Todas las oscilaciones libres son oscilaciones amortiguadas y tienen poca aplicación en el campo tecnológico. Este tipo de oscilación es el que se produce al percutir una cuerda de piano o un parche de tambor. Fig. 4: Oscilación Amortiguada Todos los cuerpos reales son sistemas oscilantes, de manera que cuando a ellos se le aplica una fuerza deformadora en un sentido, se generan oscilaciones en torno a la forma original hasta que esta se recupera y el cuerpo deja de oscilar. La frecuencia con la que se produce dicha oscilación depende de las características físicas del material y de su geometría y se denomina frecuencia de resonancia. la figura 5 ilustra este concepto, aplicando a un muelle metálico una fuerza de deformación. Con una interpretación diferente se utiliza el término frecuencia armónica. Para estos casos, son armónicas de una oscilación todas aquellas 1 La energía no se pierde, pero se transforma en calor, es decir se “disipa” del sistema, por ello a este fenómeno se lo denomina disipación térmica, y es la responsable de la amortiguación que sufre la oscilación. La energía disipada por el sistema hasta alcanzar nuevamente su punto de equilibrio es igual a la que se aplicó inicialmente para desplazar al péndulo de su posición de equilibrio. 140 oscilaciones cuyas frecuencias constituyen una serie ordinal n que responden a la fórmula general : n nv a. armónica = frecuencia x 2 Ejemplo : Dada una oscilación con frecuencia de 10 hz, la primera ar1 mónica es la oscilación que tiene frecuencia de 20 Hz ( 10 x 2 = 20), la 2 segunda armónica será la oscilación cuya frecuencia es 40 ( 10 x 2 = 40) , 3 la tercera armónica es la de frecuencia de 80 Hz (10 x 2 = 10 x 8 = 80), y así sucesivamente. Oscilaciones Forzadas Como se dijo, las oscilaciones forzadas son aquellas que se producen por acción de la aplicación de energías externas. Mientras el aporte de energía compense las pérdidas producidas por el rozamiento el sistema mantendrá la oscilación. La aplicación de esta energía puede ser intermitente o de una sola vez. Fig. 5: Oscilación de un muelle metálico sometido a una fuerza de deformación. Puede advertirse que se trata de una oscilación amortiguada Aplicación intermitente de energía: cuando la aplicación de la energía externa al sistema es intermitente sus efectos sobre el mismo dependerán del intervalo o período con el que ésta se aplica. Para facilitar la comprensión analicemos el caso de deformación del muelle por una fuerza (fig.5). Como ya se ha puntualizado, la aplicación de una fuerza(externa) iniciará la oscilación libre del muelle, que como tal sufrirá el efecto amortiguador de la disipación térmica (disipación de energía por rozamiento); para evitar que el sistema retorne al equilibrio es necesario aportar, en forma intermitente, energía adicional en forma de fuerza (impulso). Pero los efectos de esta energía dependerán de las características de su aplicación.(orientación e intervalo de aplicación). Si la fuerza aplicada tiene sentido contrario al sentido de la oscilación provocará deformaciones de la trayectoria de ésta y no compensará los efectos de la disipación térmica (fig 6ª), en cambio si lo hace en el sentido de la oscilación podrá provocarse o no deformación de la 141 trayectoria, pero compensará la amortiguación por disipación térmica.(fig. 6b). a b Fig. 6: Efectos de la aplicación de una fuerza a una oscilación amortiguada. a) la fuerza se aplica en sentido inverso al sentido de la oscilación. b) la fuerza se aplica en el mismo sentido que el de la oscilación. Hasta aquí hemos analizado el efecto de un impulso externo aplicado al sistema en relación con el sentido de la oscilación. Cabe preguntarnos, ahora, ¿que ocurre cuando al sistema oscilante le aplicamos impulsos repetidos a intervalos iguales?. Evidentemente, el sistema oscilará por todo el tiempo que se apliquen los impulsos, pero las características de dicha de oscilación será variable según los intervalos y el sentido de la fuerza aplicada. Si ensayáramos impulsos, siempre en el sentido de la oscilación, a intervalos variables comprobaremos que, cuando el intervalo es igual a la del período de la oscilación libre del sistema pueden producirse dos cosas: a) Si la energía aplicada por la fuerza es igual a la energía térmica disipada, el sistema oscilará con amplitud constante mientas duren los impulsos. b) Si la energía aplicada por la fuerza es mayor que la energía térmica disipada, el sistema oscilará con amplitud creciente hasta 2 vencer la resistencia elástica del material y producir su rotura. En ambos casos conservará su carácter armónico (senoidal).La frecuencia de repetición de los impulsos ( que también constituye un fenómeno oscilatorio porque se trata de la variación de una magnitud física que se repite, la fuerza) corresponde a la frecuencia de resonancia del sistema. Un sistema oscilante requiere mínima energía externa para oscilar cuando ésta se aplica con una frecuencia igual a su frecuencia de resonancia. Ondas Las ondas son oscilaciones propagadas 2 Es éste el fenómeno por el cual un tenor puede romper una copa de cristal, si el tono de su voz tiene la misma frecuencia que la frecuencia de oscilación libre de la copa. (frecuencia de resonancia) 142 Cuando una oscilación producida en un punto se propaga, es decir se verifica a distancia, el fenómeno recibe el nombre de onda. La onda, puesto que es oscilación, conserva las propiedades de ésta: Naturaleza Amplitud Frecuencia A las que se suman las que resultan de su propagación: Velocidad de Propagación Forma de propagación: Longitudinal Transversal Longitud de Onda Con respecto a su naturaleza, las ondas pueden ser mecánicas o electromagnéticas. Para que exista propagación de una onda mecánica es necesario que exista un medio elástico ( con movilidad molecular), es decir que no puede hacerlo en el vacío (ausencia de moléculas), condición que no es necesaria para las ondas electromagnéticas. Las ondas electromagnéticas, a diferencia de las mecánicas, pueden propagarse en el vacío La velocidad de propagación, de las ondas mecánicas, está condicionada por las características moleculares del medio en el que se propaga, es mayor cuando mayor es ésta. Las ondas electromagnéticas (luz, ondas de radio, etc.), la velocidad es constante y máxima (300.000 Km/seg) en el vacío, pero, dependiendo de su frecuencia, varían ligeramente en otros medios. Con respecto a la forma de propagación, reconocemos dos, conforme la oscilación se realice transversal o paralela a la dirección de propagación, las primeras reciben el nombre de transversales y las segundas el de longitudinales. (fig 7). 143 Fig. 7 Las ondas electromagnéticas son de propagación transversal, en tanto que las mecánicas pueden adoptar cualquiera de las dos formas aunque, en su mayoría, son longitudinales. Un ejemplo de ondas transversales son las que se producen en la superficie de un lago o mar (Olas) que producen desplazamiento hacia arriba y debajo de las partículas de agua mientras se propagan horizontalmente hacia la costa. El sonido, una onda de naturaleza mecánica, es de propagación longitudinal. La longitud de onda, es la distancia que recorre la onda durante una oscilación completa, por lo tanto será mayor cuando mayor es la velocidad de onda o menor sea la frecuencia. En la figura 8 se representan dos ondas propagándose transversalmente en un medio, (como el medio es el mismo sus velocidades son iguales) , la onda a) de menor frecuencia que la onda b), Obsérvese como la onda a) demora mas que la onda b) para completar la oscilación, por lo tanto, la distancia recorrida por la onda a) debe ser mayor que la recorrida por la b). Para determinar la longitud de una onda se precisa conocer: su velocidad en el medio en el que se propaga y su frecuencia y aplicar la siguiente fórmula : 144 λ = v. 1 f donde: λ = longitud de onda v = velocidad en el medio f = frecuencia de la oscilación Fig. 8 La relación 1 / f se denomina Período, y expresa el tiempo que transcurre en realizarse una oscilación completa. El concepto de longitud de onda es importante en ultrasonografía diagnóstica. Comportamiento de las Ondas al atravesar medios de diferente impedancia acústica Hasta este punto hemos analizado el comportamiento de una onda en un solo medio y podemos afirmar que la propagación en tal situación es rectilínea, con velocidad uniforme y siempre en el mismo sentido. En cambio, no son estas las características de propagación de una onda que atraviesa diversos medios; su comportamiento depende de los fenómenos que se producen en el límite entre cada uno de los medios atravesados, límite al que llamaremos interfase. Si bien no será desarrollada en detalle la explicación para cada comportamiento o fenómeno que sufre la onda a nivel de esta interfase, corresponde decir que las mismas surgen del Principio de Huygens, según el cual “todo punto de un medio hasta el cual llega una perturbación se comporta como foco de ondas secundarias” , es decir que se propaga formando un “frente de onda” constituido por las emisiones secundarias(fig 9) 145 Fig. 9 : propagación del frente de onda Basado en este principio se explican tres fenómenos cuyo conocimiento se aplica en el estudio de la ultrasonografía diagnóstica y que tienen que ver con la interfase: a) cuando la superficie de la interfase es menor que la longitud de onda la onda sufre un efecto denominado “ difracción “ que consiste en la deformación del frente de onda, que en la práctica resulta en una dispersión en los haces enfocados ( ejemplo : haces del transductor ultrasónico). b) Cuando la superficie de la interfase es mayor que la longitud de onda, la onda sufre un efecto denominado reflexión, que consiste en el retorno, al medio de origen, de una onda de las mismas características que la onda incidente en la interfase, cuya dirección queda determinada por el ángulo de incidencia de ésta. c) Los puntos de la interfase (según el principio de Huygens) se comportan como emisores secundarios produciendo la perturbación en el otro medio donde la onda se propagará a una velocidad diferente y una resistencia ofrecida por el medio que también será diferente (impedancia acústica) que determinan un tercer efecto “ la refracción” que consiste en la desviación del frente de onda al atravesar la interfase. Como conclusión de lo expuesto en los puntos a) y b) , surge el concepto de interfase reflectante o especular : como aquella interfase cuyo tamaño es mayor que la longitud de la onda incidente, de lo contrario dicha superficie se comporta como difractante. En la figura 10 se muestra el efecto de difracción ( en este caso el fenómeno ondulatorio es la luz) . Es la fotografía de la sombra de una hoja de afeitar interpuesta en el trayecto de una onda de rayos paralelos (fig 4 b)) (observe el frente de onda en la fig 4 a)) , puede verse que los contornos de 146 la misma no están perfectamente definidos debido a que los rayos marginales se encuentran con una interfase (filo de la hoja) muy pequeña en relación con la longitud de onda. La imagen con múltiples bandas que se observa debajo de la silueta de la hoja es una vista ampliada de una porción del borde. Este efecto también puede observarse en las ondas transversales de una superficie de agua cuyo frente de onda, al alcanzar una piedra de pequeñas proporciones , se advierte que el frente de onda se deforma contorneándola pero no se produce reflexión. Fig. 10 Onda y energía a) b) La naturaleza oscilatoria de la onda implica, como hemos visto al analizar las oscilaciones, una disponibilidad energética suficiente para que se produzcan la perturbaciones en forma periódica,. Esta energía es portada por la onda y se disipa en forma de calor por los fenómenos mecánicos o electromagnéticos; según sea la naturaleza de aquella, que genéricamente reciben la denominación de impedancia , es decir oposición a las variaciones. En el fenómeno ondulatorio, esta impedancia resulta no solamente del carácter oscilatorio sino también de su propagación. Cuando la emisión de la onda es intermitente, es decir que porta una cantidad acotada de energía, la propagación de la oscilación tendrá un alcance limitado por ésta, es decir se comportará como una oscilación amortiguada, lo que en otras palabras significa que la oscilación perderá amplitud a medida que la onda progresa. Este fenómeno se denomina absorción. Cuando la propagación se realiza a través del medios diferentes, la energía portada por la onda incidente disminuye como consecuencia de los fenómenos de interfase (Dispersión, reflexión, y refracción), debido a que parte de esta energía es aplicada a la generación de la onda reflejada, a la deformación del frente de onda (difracción, en ocasiones también denomi147 nada dispersión del haz) y, por último, no toda la energía portada por el haz refractado sigue la dirección rectilínea de propagación ( fig. 11) Figura 11 Al atravesar el límite entre medios el haz ondulatorio modifica su dirección de manera tal que sólo una porción de su energía portada continua en trayecto rectilíneo original del haz incidente, otra porción mayor o menor de la misma (dependiendo del grado de desviación) se disipa hacia otro frente de onda. Estas proporciones, como muestra el dibujo de la izquierda, pueden calcularse en base a la ley del paralelogramo. Como consecuencia de los efectos de la absorción, difracción (dispersión) y refracción la onda pierde intensidad atenuándose progresivamente, hasta desaparecer, la oscilación, fenómeno que se denomina Atenuación. (fig. 12) Figura 12. Fenómenos que producen la atenuación de la onda. 148 Efecto Doppler En los capítulos anteriores hemos analizado las características del fenómeno ondulatorio y los efectos que tienen los medios, en función de su impedancia, sobre la dirección y la energía portada por la onda de un emisor. Hemos observado entonces que la onda sufre modificaciones de velocidad de propagación y amplitud y que las interfases entre medios de distinta impedancia acústica desvían su trayectoria. Por el contrario, nada ocurre con su frecuencia. Para los casos en los que el emisor se halla en movimiento, la onda que es detectada por un receptor estático (quieto) no tendrá la misma frecuencia. Para comprender este fenómeno es necesario el repaso de algunos conceptos ya citados en las partes precedentes. 1) La velocidad de propagación de la onda en un medio determinado es constante. 2) La longitud de onda ( distancia recorrida por la onda para completar una oscilación completa) se expresa matemáticamente de la siguiente manera: λ= c f (Ecuación 1) Donde: λ = longitud de onda c = velocidad de propagación de la onda en el medio f = frecuencia de la onda Multiplicando numerador y denominador del segundo término de la Ecuación 1 por un mismo número, el resultado no varía. Para este caso: t correspondiente a un determinado tiempo la ecuación quedaría formada de la siguiente manera: λ= c.t f .t Pero como c es una velocidad y toda velocidad multiplicada por tiempo da distancia : c.t = d en tanto que f.t es el número de oscilaciones producidas en el tiempo t., reemplazando c.t por d tenemos: λ= d f .t (Ecuación 2) Teniendo presente estos conceptos analizaremos los efectos que tienen sobre la frecuencia de la onda el acercamiento y/o alejamiento entre una 149 fuente emisora de onda y una superficie reflectante. En la figura 1 se presentan las tres situaciones genéricas: (a) Fuente y superficie reflectora se mantienen estáticas, por lo tanto, la distancia entre ellas no varía durante el tiempo t. (b) durante el tiempo t, la distancia entre ambas disminuye(sea por movimiento de la fuente o de la superficie reflectora) (c) durante t, la distancia entre ambas aumenta, también por movimiento de cualquiera de las dos. No obstante que, como se ha dicho, el efecto del alejamiento o el acercamiento entre fuente y superficie reflectante es independiente de cual de ellas se mueve, para facilitar la comprensión y aproximándonos a las aplicaciones de este efecto en el campo de la ultrasonografía diagnóstica , tanto al acercamiento como al alejamiento lo haremos a expensas del movimiento de la superficie reflectante (SR) En (a) la longitud de onda de la onda emitida( ecuación 2, es: λe = e) es, conforme a la d d' y, por la misma razón , λr = , como d y d’ son iguales fe.t f r .t porque no se a producido variación de distancia durante el tiempo t, resulta que ambas longitudes de onda son iguales, el número de oscilaciones emitidas durante el tiempo t ( fe . t) es igual al número de oscilaciones reflejadas(fr . t) durante ese mismo tiempo y teniendo en cuenta la ecuación 2 tenemos que: fe = d d' y fr = ; son fe y fr iguales. λe .t λr .t Corolario 1: Si la distancia entre la fuente emisora y la SR no varía durante el tiempo t, la frecuencia de la onda emitida y la frecuencia de la reflejada son iguales durante dicho tiempo. En el caso (b) de la figura 13, durante el tiempo t, la SR se aproxima a la fuente y por lo tanto disminuye la distancia d’ y por lo tanto d > d’, por lo que e > r y como la frecuencia de onda es inversamente proporcional a la longitud de onda (ecuación 2), resulta que fe < fr. Corolario 2: Si la distancia entre la fuente emisora y la SR disminuye durante el intervalo t, la frecuencia de la onda reflejada es mayor que la de la onda emitida. Finalmente, para el caso (c) de la figura 1, en el que la SR se aleja de la fuente emisora durante el tiempo t, resulta que d < d’ , por lo tanto, e < r y, entonces, fe > fr. Corolario 3: Si la distancia entre la fuente emisora y la SR aumenta durante el intervalo t, la frecuencia de la onda reflejada es menor que la de la onda emitida. 150 Figura 13: Modificaciones de la frecuencia: Efecto Doppler. Se representa el diagrama de un sistema de emisión-recepción de una onda donde E es la fuente emisora, SR la superficie reflectora de la onda y R el receptor de la onda reflejada, d mide la distancia inicial y d’ la correspondiente al final del intervalo t (ver texto). Las flechas de líneas punteadas representan el desplazamiento de la SR durante t. fe y fr representan la frecuencia emitida y la frecuencia de la onda reflejada, respectivamente. e y r son las longitudes de onda emitida y reflejada. Como acabamos de ver, es la “variación” de distancia en un determinado tiempo (velocidad) la que produce el cambio de frecuencia, cambio que es proporcional a la magnitud y dirección de esta variación que, en definitiva, es la velocidad de la SR para el caso estudiado, pero que bien podría ser la de la fuente emisora, si esta fuera la que se halla en movimiento. A los cambios de frecuencia de onda producidos por el movimiento de una fuente emisora se denomina Efecto Doppler. Parecería un contrasentido haber presentado esta explicación con el movimiento de una superficie reflectora por cuanto, en realidad, al efecto se lo define en función del movimiento de la fuente emisora; pero resulta que, de acuerdo al principio de Huygens, toda superficie reflectora se comporta como una fuente emisora secundaria. Se entiende por Frecuencia Doppler a la diferencia entre la frecuencia de la onda recibida y la onda emitida y se expresa: f D = fr − fe Donde: f D = Frecuencia Doppler. f r = Frecuencia recibida. f e = Frecuencia emitida. 151 Como la onda emitida depende de las características de la fuente emisora, en cuanto a la naturaleza y frecuencia no existen inconvenientes en conocerla. No ocurre lo mismo con la frecuencia de la onda recibida, es decir la que resulta del movimiento de la fuente la que debe ser calculada a partir de parámetros conocidos que intervienen en el fenómeno, a saber: 1) Frecuencia de emisión 2) Velocidad de Propagación de la onda en el medio 3) Dirección, velocidad y sentido del movimiento de la fuente. Una situación posible cuando se desea conocer la velocidad de una superficie reflectora (emisión secundaria) o una fuente emisora, frecuente en ultrasonografía Doppler, es que la dirección del haz ondulatorio emitido no coincida con la dirección del movimiento de la fuente. En ese caso, teniendo en cuenta que el movimiento es una magnitud vectorial y por tanto puede aplicarse la regla del paralelogramo, la velocidad con la que se acercan o se alejan emisor y receptor no refleja la velocidad que realmente tiene el móvil. Para explicar este fenómeno utilizaremos el ejemplo de la figura 14. Figura 14. Cálculo de la velocidad de la fuente emisora cuando la dirección del movimiento es diferente a la dirección del haz ondulatorio recepcionado. En (a) la fuente emisora(E), durante un tiempo t, se desplaza en la dirección indicada por la flecha, desde la posición p1 hasta la posición p2 recorriendo la distancia e, por lo tanto la velocidad de E es : e/t. Durante este mismo tiempo, el acercamiento hacia el receptor (R) en el sentido que explora el haz ondulatorio ( linea de puntos finos) , el horizontal, solo se ha desplazado la distancia e’ y por lo tanto la velocidad con que se aproxima E a R es e’/t. Como puede advertirse los cambios de frecuencia reflejarán esta última velocidad, que es menor que la de E. En (b) se muestra como puede descomponerse el movimiento de E, cuya velocidad, sentido e intensidad están representados por el vector Ve y la velocidad de acercamiento a R (e’/t) en el sentido horizontal (que es la dirección del haz ondulatorio) por el vector Ve’ y, finalmente, en (c) se construye un triángulo rectángulo cuya hipotenusa es el vector Ve y el cateto adyacente el vector Ve’ , de manera que que limitado el ángulo que corresponde al ángulo de desviación entre la dirección del haz y la de el movimiento de E. Por trigonometría : Ve ' cosα = Ve Teniendo en cuenta lo explicado en la figura 14, es posible conocer la velocidad de la fuente aplicando la fórmula del coseno del ángulo de des - 152 viación entre el movimiento de E y la dirección de exploración del receptor, de la siguiente manera: si: cosα = Ve ' Ve resulta, por pasaje de términos, que: Ve = Ve' cosα Esto explica la intervención del coseno del ángulo de desviación entre la dirección de recepción y la del desplazamiento de E en la fórmula general de frecuencia Doppler que sigue: f D = 2 f e. Ve ' cosα c Donde : fD = Frecuencia Doppler fe = frecuencia de emisión Ve = velocidad de E ( fuente emisora) c = velocidad de propagación de la onda en el medio SONIDO Y ULTRASONIDO El sonido es un fenómeno ondulatorio de naturaleza mecánica y propagación longitudinal que consiste en variaciones de presión que se ejercen sobre un medio elástico y por lo tanto no se propaga en el vacío. Como todo fenómeno ondulatorio posee características vinculadas a su calidad de oscilación ( frecuencia y amplitud) y a la onda (velocidad de propagación y longitud de onda) y sufre durante su producción y propagación los efectos que caracterizan a este tipo de fenómeno físico (absorción, reflexión, difracción y efecto Doppler). Estas ondas denominadas genéricamente sonidos, en su propagación pueden, al alcanzar el oído humano, provocar la sensación que usualmente conocemos con el nombre de sonido cuando su frecuencia está en el rango de 17 a 20000 Hz. ( 17 a 20000 ciclos por segundo), oscilaciones por debajo y por encima de estos límites no son percibidas por el oído humano (aunque pueden serlo por otros animales) y constituyen las frecuencias subsónicas y ultrasónicas, respectivamente. Las oscilaciones subsónicas también pueden ser percibidas por el hombre como fenómenos vibratorios merced a la palestesia, sensibilidad que se explora semiológicamente con diapasones oscilantes colocados, generalmente, sobre la piel de una superficie ósea subyacente. El ultrasoni153 do es aquella onda sonora cuya frecuencia supera los 20000 Hz, no siendo detectable por ningún sentido humano. Independientemente de su frecuencia, la onda sonora se propaga con una velocidad que depende del medio en el que ella se verifica y depende básicamente de velocidad de movimiento térmico molecular del mismo, lo que determina su estado físico (sólido, líquido y gaseoso), que a su 3 vez también está influenciado por la temperatura , la velocidad de propagación en el aire a 0 ºC es de 331 m/seg. La velocidad del sonido en el agua es mayor que en el aire y fue medida por primera vez en 1897 en Suiza, en el Lago de Ginebra, resultando ser de 1435 m/seg, para una temperatura de 8 ºC. En los sólidos, la velocidad del sonido es aún mayor que en los líquidos, por ejemplo, en el acero a 15 ºC es de 4980 m/seg. En los tejidos biológicos, la velocidad del sonido es muy variables y depende de la naturaleza de los diversos tipos de tejidos que atraviesa, pero a los fines técnicos y prácticos se asume que la velocidad media es de 1540 m/seg, velocidad muy cercana a la de la propagación en el agua. Conociendo la velocidad del sonido y su frecuencia puede conocerse la longitud de onda del mismo, dato importante para determinar la factibilidad de reflexión de una onda sonora en función del tamaño de las interfases que encuentre a su paso. Por ejemplo: para que una onda sonora cuya frecuencia coincide con la nota La central de la escala musical (440 Hz) que se propaga por el aire se refleje, la dimensión de la interfase debe ser 4 de 0.75 m o más. , en caso contrario la onda sufrirá efecto de difracción. En caso de que dicha onda se propague en el agua (velocidad de propagación prácticamente igual a la media de los tejidos orgánicos) las dimensiones de la interfase especular deberían ser sustancialmente mayores ( 3,26 m.), es decir que, a mayor velocidad de propagación, a frecuencia constante, se requieren mayores dimensiones de las interfases para que se comporten como especulares. A la inversa, veamos que ocurre si a velocidad constante ( en el agua) se varía la frecuencia de la onda. Supóngase, entonces, que una onda de 5000 Hz se propaga en el agua: su longitud de onda será 0.28 cm, y por lo tanto las dimensiones de la interfase necesaria para que ella se comporte como especular ( permita la reflexión) deben tener como mínimo 28 cm. compárese con el caso anterior, cuando la frecuencia de la onda era de 440 Hz. Es decir que: a mayor frecuencia de propagación y a velocidad constante, se requieren menores dimensiones de las interfases para que se comporten como especulares. 3 La velocidad de propagación es aproximadamente igual a la velocidad media del movimiento térmico de las moléculas y, lo mismo que ella, es proporcional a la raíz cuadrada de la temperatura absoluta. 4 Para que una superficie actué como especular es necesario que sus dimensiones sean igual o superiores a la longitud de onda. Para el caso : la longitud de onda es igual a 331/440, lo que da aproximadamente 0.75 m. 154 Estos conceptos explican porque aplicando detección de interfases por eco (principio de la ultrasonografía) se utilizan ondas de muy alta frecuencia, del orden de los MHz, para aumenta la resolución, es decir, para detectar estructuras los mas pequeñas posibles. Las ondas emitidas, por lo tanto, están dentro del rango del ultrasonido. En la tabla I se muestran las longitudes de ondas ultrasónicas a través de los tejidos mas frecuentemente utilizadas en ultrasonografía diagnóstica. Frecuencia (MHz) Longitud de onda (mm) 1.6 0.962 2.5 0.616 3.5 0.440 5.0 0.308 7.5 0.205 10 0.154 12 0.128 Tabla I. Longitud de onda de los ultrasonidos mas usado en ultrasonografía diagnóstica. Se tomaron a una velocidad de 1540 m/seg, que corresponde a la velocidad de propagación en los tejidos. Atenuación del ultrasonido Aunque algunos autores asimilan el término atenuación al de absorción al referirse a los fenómenos ondulatorios, en realidad la atenuación es la pérdida de energía portada por la onda al cabo de cierto trayecto producida no sólo por la disipación térmica(absorción), sino también por los fenómenos de reflexión y difracción que se producen en su itinerario. Absorción: Si bien una mayor frecuencia posibilita mejor resolución, no siempre es posible aplicarla en la detección de las estructuras orgánicas pues existe una relación de compromiso entre la frecuencia y la profundidad que puede alcanzar la onda sonora, hecho que está dado por el efecto de atenuación. 5 La magnitud de este fenómeno depende los coeficientes de absorción , los efectos de difracción y de reflexión. Por otra sabemos que la absorción en proporcional a la frecuencia de la onda, esto significa que cuando mayor es la frecuencia, mayor es la perdida de energía ondulatoria en forma de calor y por lo tanto la penetración será menor, puesto que la absorción se expresa como pérdida de energía por distancia propagada. En la tabla II se consignan los coeficientes de absorción de algunos tejidos humanos, cuando mayor es éste, mayor es la pérdida de energía para igual frecuencia. Para calcular la energía que portará al recorrer una distancia x se aplica la siguiente fórmula: 5 Absorción es la pérdida de energía portante por la onda en razón de su disipación térmica. 155 E p = E i .e −α . x Donde: Ep = energía portante Ei = Energía inicial coeficiente de absorción del medio x = distancia recorrida Tabla II Tejido Coeficiente de Absoción( )* Agua Sangre Tejidos Cardíacos Hígado Grasa 0.0003 0.02 0.25 – 0.38 0.07-0.13 0.04-0.09 *: estos coeficientes se calcularon para una frecuencia ultrasónica de 1 MHz. 6 De lo dicho se desprende que la frecuencia útil para un determinado estudio ultrasónico está determinada por la profundidad a la que se encuentran las estructuras que se deben estudiar, el tamaño de las mismas y los detalles que se pretende reconocer. Se estima que pueden conseguirse buenos ecos (esto significa buena penetración del haz) hasta profundidades que alcancen una distancia 200 veces superiores a la longitud de onda del ultrasonido ( la longitud de onda es inversamente proporcional a la frecuencia), por lo tanto será mayor cuando menor es la frecuencia. En la tabla III se muestran la profundidades que puede alcanzar el haz ultrasónico en función de su frecuencia: Tabla III Frecuencia 1 MHz 2 MHz 5 MHz 7.5 MHz 10 MHz longitud de onda 0.15 cm 0.08 cm 0.03 cm 0.02 cm 0.02 cm Profundidad 30.8 cm 15.4 cm 6.16 cm 4.10 cm 3.08 cm Reflexión Como se ha visto, el fenómeno de reflexión hace que una porción de la energía portada por la onda genere una onda reflejada (onda que retorna al medio de origen) y por lo tanto genere la pérdida de esta para el haz que continúa la trayectoria. La intensidad de esta energía reflejada puede calcularse según la siguiente fórmula : 6 Debe tenerse presente que si la frecuencia aumenta también aumentará dicho coeficiente. 156 Ir = Ii ( Z 2 − Z1 2 ) Z 2 + Z1 Donde: Ir = Energía portada por el haz reflejado Ii = Energía portada por el haz incidente Z1 = Impedancia acústica característica del medio 1 Z2 = Impedancia acústica característica del medio 2. 7 ( ver fig. 15) I1 Z1 Medio 1 Z2 Medio 2 I2 Figura 15. A partir de la ecuación anterior puede calcularse el porcentaje de la energía del haz incidente que se pasará a ser portada por el haz reflejado y por lo tanto significará una pérdida en el primero, aplicando la formula siguiente: I r % = 100.( Z 2 − Z1 2 ) Z 2 + Z1 Donde Ir% es la energía portada por la onda reflejada en términos de porcentaje de la energía portada por el rayo incidente. En la tabla IV se consignan las impedancias acústicas características de algunos tejidos. Tabla IV Tejido u órgano Impedancia Acústica característica (Z) Agua 1.52 Sangre 1.62 Corazón 1.65 – 1.74 Hígado 1.64 – 1.68 Pulmón 0.26 Grasa 1.35 Hueso 7.8 7 La impedancia acústica característica es una propiedad del medio que depende de su naturaleza estructural. 157 Como Ejemplo: supóngase que un haz ultrasónico incidente encuentra una interfase formada por el límite entre grasa y hueso, donde el medio 1 es la grasa y el 2 el hueso, para conocer el porcentaje de energía que será portado por el haz reflejado, utilizando los datos de la tabla tendremos: 7.8 − 1.35 I r % = 100. = 49% 7.8 + 1.35 2 Esto significa que cuando un haz ultrasónico que se propaga por un tejido graso alcanza una superficie ósea perderá el 49% de su energía en forma de haz reflejado. Dicho de otra manera: la interfase grasa-hueso producirá una atenuación del 49% en el haz ultrasónico incidente. Cuando mayor es la intensidad (energía portada) del rayo reflejado mayor es la ecogenicidad de la interfase y por lo tanto mayor es la atenuación del haz incidente. Difracción Cuando el haz incidente alcanza una interfase cuya dimensión es menor que la de la longitud de onda, no se produce reflexión, acaeciendo el fenómeno denominado difracción por el cual una porción de la energía del rayo incidente es derivada para la formación de haces sucedáneos de dirección diferente, de manera que este fenómeno es también causal de atenuación de dicho haz. Ultrasonidos y Tejidos Biológicos Un haz ultrasónico tiene diversas acciones y comportamientos que dependen de la energía portante, la longitud de onda y las interfases acústicas que se interpongan en su trayectoria. Cuando pasan ondas ultrasónicas a través del cuerpo, se producen varios efectos tanto físicos como químicos que pueden tener consecuencias fisiológicas, la magnitud de estas consecuencias depende de la frecuencia y amplitud de la onda. A niveles de intensidad muy bajos usados para el diagnóstico (0.01 W/cm² potencia promedio y 20 W/cm² potencia pico), estas consecuencias no son observables. Cuando aumentamos la potencia, el ultrasonido se convierte en una herramienta útil en la terapia: se usa para calentamientos profundos con una potencia del orden de 1 W/cm² y como un agente destructor de la piel cuando la intensidad es del orden de 10³ W/cm². El aumento en la temperatura es muy importante en terapia. Cuando se produce en los músculos profundos causando apenas un leve incremento a nivel superficial, esta técnica es conocida como diatermia y también se puede lograr usando microondas. Se usa principalmente en enfermedades óseas para remover depósitos de calcio o ayudar en dolores reumáticos, o bien en la rigidez de coyunturas. 158 Efectos Térmicos El aumento de la temperatura del tejido producida por la absorción del ultrasonido varía de acuerdo al tejido al cual el ultrasonido es aplicado tanto como de la frecuencia, intensidad, y duración del ultrasonido. La tasa promedio de calentamiento es proporcional al coeficiente de absorción del tejido en el que se aplica una frecuencia de ultrasonido. El coeficiente de absorción aumenta cuando aumenta la cantidad de colágeno del tejido en proporción a la frecuencia del ultrasonido. De este modo altas temperaturas son logradas en tejidos con alto contenido de colágeno y con la aplicación de ultrasonido de alta frecuencia. Cuando el coeficiente de absorción es alto, el aumento de la temperatura es distribuido en un pequeño volumen en tejidos más superficiales que cuando el coeficiente de absorción es bajo, cuando se cambia el coeficiente de absorción se altera la distribución del calor pero no cambia la cantidad total de calor que esta siendo entregada. Con un ultrasonido de 3 MHz, aunque la máxima temperatura que se logra es más alta, la profundidad de penetración es más baja. Durante la aplicación del ultrasonido el cambio en la temperatura del tejido es también afectada por otros factores como la absorción. Esto incluye el enfriamiento debido a la circulación sanguínea a través del tejido; calentamiento por las ondas de ultrasonido reflejada, particularmente en regiones de la interfase tejido blando - hueso; y el calentamiento por conducción de un área tibia o calentada a otra. Como promedio la temperatura del tejido blando a demostrado aumentos de 0,2° celcius por minuto, con ultrasonido entregado a 1 W/cm2 a 1 MHz. El número de las variables desconocidas incluyendo la tensión de cada tejido, la cantidad de circulación, y la distancia de reflexión de las interfases tejido blando - hueso, hacen difícil predecir de manera exacta el aumento de temperatura que se producirá clínicamente cuando el ultrasonido es aplicado al paciente. Efectos No Térmicos El ultrasonido tiene una variedad de efectos sobre los procesos biológicos que se piensan no esta relacionados con el aumento de la temperatura de los tejidos. Estos efectos son el resultados de eventos mecánicos producidos por el ultrasonido, incluyendo la cavitación, el microdesgarro y el desgarro acústico. Cuando el ultrasonido es entregado en un modo pulsátil el calor generado durante el tiempo encendido se dispersa durante el tiempo de apagado resultando en una cantidad no significativa de aumento de la temperatura. Así el ultrasonido con un ciclo de trabajo en un 20% ha sido usado generalmente para aplicar y estudiar los efectos no térmicos del ultrasonido. El ultrasonido pulsátil ha demostrado incrementos en el calcio intracelular, aumenta la permeabilidad en la piel y en la membrana celular, aumento 159 en la degranulación de los mastocitos, aumentos en el factor quimiotácticos y en la liberación de histaminas, aumentos en la respuesta de macrófagos y aumentos en la tasa de síntesis de proteínas por los fibroblastos. Estos efectos han sido demostrados usando ultrasonidos en intensidades y ciclos de trabajo que no producen aumentos medibles en la temperatura y son por lo tanto considerados como efectos no térmicos. Ellos han sido atribuidos a la cavitación, microdesgarro y desgarro acústico. Ya que estos procesos o celulares son componentes esenciales de la reparación tisular, los cambios en estos procesos producidos por el ultrasonido se piensan que son subyacentes a la reparación que llega a ser observada en respuesta a la aplicación de ultrasonidos a una variedad de patologías. Por ejemplo, el aumento del calcio intracelular puede alterar la actividad enzimática de las células y estimular su síntesis y secreción de proteínas debido a que los iones de calcio actúan como señales químicas ( segundo mensajero) para la célula. Los grandes cambios en los niveles de cambio intracelular se han reportado que ocurren en respuesta a un ultrasonido pulsátil al 20% en intensidades de 0,5 a 0,75 W/cm2. El hecho que el ultrasonido pueda afectar la respuesta de los macrófagos explica en parte por que el ultrasonido es particularmente efectivo durante la fase inflamatoria de la reparación, cuando el macrófago es el tipo de célula dominante. Es interesante notar que el ultrasonido pulsátil ha demostrado tener significativamente grandes efectos sobre la permeabilidad de la membrana que el ultrasonido continuo entregado en la misma intensidad. Ultrasonografía diagnóstica Cuando se utiliza la emisión de ultrasonidos para fines diagnósticos, la 2 potencia es muy baja (0.02Watts/cm ) y no producen ninguno de los efectos descriptos sobre los tejidos que atraviesa el haz. en este campo, se aprovecha el fenómeno de reflexión para obtener información anatómica y funcional de órganos y sistemas. La información anatómica puede presentarse en diversos modos, pero los mas usados en la práctica médica son el modo M (modo de movimiento) y modo B (actualmente se denomina con esta nomenclatura al modo bidimensional, anteriormente correspondía a una modalidad especial e presentación denominada modo brillo) . Para mas información acerca de este tema se aconseja remitirse a “ Formación de la Imagen en Ecografía “ que se consiguen a partir de la aplicación de señal ultrasónica pulsada, procesando la imagen como resultado de la amplitud y tiempo de recepción del eco. Otra modalidad de procesamiento de la señal ultrasónica es el estudio de la variación de frecuencia entre onda emitida y reflejada (efecto Doppler) que permite evaluar elementos tisulares en movimiento, determinar el sentido y velocidad del mismo. La presentación de esta información puede hacerse con dos modalidades: 160 1.- Espectrograma de frecuencias 2.- modo color . FORMACION DE LA IMAGEN DE ESTRUCTURAS ANATOMICAS EN ECOGRAFIA BASES ELECTRÓNICAS El cristal piezoeléctrico es un cristal que: • Se deforma cuando es atravesado por una corriente eléctrica, y • genera una corriente eléctrica cuando es deformado. Cuando se aplica una corriente eléctrica con polaridad alternativa (corriente alterna) a un cristal piezoeléctrico se produce su vibración que, al propagarse, adquiere la propiedad de onda mecánica. Según la frecuencia de vibración (frecuencia de la corriente alterna aplicada) éste será un sonido propiamente dicho(escuchable) o un ultrasonido. A la inversa, cuando un cristal piezoeléctrico se deforma alternativamente por efecto de una onda mecánica genera una corriente alterna de la misma frecuencia mecánica que puede ser detectada por un equipo electrónico amplificador y luego procesada. Conclusiones: • El cristal piezoeléctrico puede ser utilizado como un emisor de ultrasonidos, aplicándole una corriente alterna de la frecuencia ul8 trasónica ( habitualmente más de 1 MHz ). • El cristal piezoeléctrico puede ser utilizado como receptor ultra sónico, recibiendo corriente la alterna que genera por la vibración y amplificándola para procesarla. • Un mismo cristal piezoeléctrico no puede funcionar como emisor y receptor al mismo tiempo: o emite, o recibe. • Un mismo cristal piezoeléctrico puede actuar en un momento como emisor y en otro momento como receptor: para ello es necesario disponer de un dispositivo que sea capaz de aplicar corriente en un momento determinado y recibir corriente del cristal en otro momento. Modalidades de emisión–recepción en ultrasonografía diagnóstica utilizando el cristal piezoeléctrico: El cristal es el corazón de lo que será el transductor ultrasónico. Como tal, se lo puede usar con dos modalidades distintas de emisión- recepción. 8 MHz = Megahertz = 1.000.000 de ciclos por segundo 161 • Modalidad Continua: en esta modalidad el cristal recibe permanentemente una corriente alterna de la frecuencia que se quiere emitir y actúa exclusivamente como emisor del haz ultrasónico, para recibir señal es necesario adosar al transductor otro cristal que actúe como receptor. No tiene aplicación en los procesos de obtención de imágenes de estructuras anatómicas (ecografía modo M, modo Brillo (llamada también modo amplitud) o modo Bidimensional) • Modalidad Pulsada: En esta modalidad el cristal actúa “alternativamente” como emisor ultrasónico y receptor. Para ello es necesario un sistema de llaves electrónicas que, también alternativamente, aplique o reciba corriente del cristal. Es la modalidad que se usa para la obtención de imágenes de estructuras anatómicas. Diagrama funcional de las modalidades de Emisión – Recepción Modalidad Pulsada Llave electrónica Generador AC Al paciente Generador AC Amplif AC Emisión Llave electrónica Cristal desde el paciente Amplif AC Transductor Recepción Fig 16. En esta modalidad el cristal opera en dos momentos diferentes : el momento de emisión ( a la izquierda) una llave comandada electrónicamente conecta el generador de corriente alterna de frecuencia ultrasónica (generador AC) del equipo al cristal del transductor y entonces éste, al recibir la corriente, genera el haz ultrasónico que se dirige al paciente. En el segundo momento, recepción, la llave desconecta el generador AC y conecta e cristal al amplificador de corriente (Amplif. AC) del equipo, de manera que la corriente generada en el cristal por las vibraciones provenientes del paciente (eco) ingresa al equipo para su proc esamiento. La llave electrónica de conmutación entre estado de emisión y de recepción se controla por un impulso eléctrico que se repite continuamente, haciendo pasar de una modalidad a otra, alternativamente, al cristal (Fig 17). Al número de veces que se repite este ciclo en un segundo se denomina Frecuencia de Repetición del Pulso (PRF, siglas en inglés), variable que adquiere importancia para limitar la profundidad máxima que se explora y, en ultrasonografía Doppler, la fidelidad para construir el espectrograma. 162 Fig. 17 Modalidad Continua Generador AC Amplificador AC Cristal Emisor Cristal Receptor Transductor Fig 18: En la modalidad de Emisión – Recepción Continua el transductor consta de dos cristales : uno emisor que está conectado permanentemente al generador AC (de corriente alterna de frecuencia ultrasónica) y emite el haz ultrasónico incidente; otro receptor que vibra por efecto del haz reflejado (eco) y genera corriente que ingresa permanentemente al amplificador del equipo donde será procesado para extraer la información Visión Esquemática de un Equipo de Ecografía: En el proceso de un estudio ecográfico el equipo de ecografía obtiene información proveniente del paciente, la procesa a información útil para el médico y se la presente a éste de diversas maneras según el tipo de estudio que se realiza y las preferencias del operador. Tanto para su comunicación con el paciente como para la que realiza con el médico existen interfases (no confundir con las interfases acústicas de las que se hablaron hasta ahora) que posibilitan que el equipo pueda interpretar las señales provenientes del paciente y las opciones seleccionadas por el médico (interfases de entrada) y también que el médico pueda interpretar la información obtenida por el equipo ( interfases de salida). A nivel de la comunicación con el paciente el equipo utiliza como interfase (entrada-salida), a través de un transductor, un sistema de emisión- recepción de ultrasonidos que varía según el tipo de estudio que se desea realizar, y a nivel de operador (médico) una interfase de entrada consistente en un teclado y otras formas de control que permiten que el equipo se entere de qué y cómo quiere el operador que funcione (controles del cursor de mouse, perillas de control de brillo, volumen del sonido, etc.) y otra interfase de salida por medio de la cual el médico puede enterarse de la información obtenida por el ecógrafo : imágenes( en monitor o fotografías, estáticas o en video, etc.) y/o sonidos. (fig. 19) El equipo de ecografía es, visto de esta manera, un procesador capaz de acondicionar de manera adecuada, a través de las modalidades de emisión recepción descriptas anteriormente, la información que debe recibir del 163 paciente y representar esta información de manera inteligible para el médico a través de la imagen o el sonido. Para el caso particular que nos ocupa, las estructuras anatómicas se representan con imágenes. Fig 19. En un estudio de estructuras anatómicas, ¿Qué información precisa el médico?... 1.- Detectar la presencia de la estructura 2.- Conocer la distancia a la que se halla 3.- Conocer las características ecogénicas de la estructura ( esto significa conocer la intensidad con que re fleja el haz ultrasónico) Detección de la estructura: para que una estructura sea detectada es necesario que forme una interfase con otro medio y que esta interfase sea alcanzada por el haz ultrasónico incidente porque entonces es posible el fenómeno de reflexión (generación del eco) y de esta manera es detectada por el equipo al producirse la recepción del eco. Pero las estructuras también deben tener cierto tamaño para que puedan ser detectadas por el sistema, es decir que la detección depende de la resolución del sistema ( tamaño mínimo que debe tener la estructura para producir el eco), la que depende, a su vez, de la frecuencia del haz ultrasónico : “a mayor frecuencia, mayor resolución”. Como regla general: la dimensión de la partícula necesaria para ser detectada debe ser mayor que la 9 longitud de onda del ultrasonido. , Es decir que debe ser una superficie especular. 9 la longitud de onda para la propagación en medios biológicos se calcula : λ = 1540 / f ; donde λ : longitud de onda y f: frecuencia del ultrasonido. 164 En la tabla V se consignan las resoluciones de las frecuencias ultrasónicas de uso habitual en ultrasonografía diagnóstica. Como se verá luego, existe también otro condicionante de la calidad de la imagen denominado “ Resolución Axial”. Tabla V MHz Tamaño de la interfase 1 2 5 7.5 10 > 1.54 mm > 0.77 mm > 0.31 mm > 0.21 mm 0.15 mm Determinación de la Profundidad ( distancia entre la estructura y el transductor): para determinar la distancia a la que se halla la estructura que produce el eco se recurre a un procedimiento indirecto que se basa en que el aparato puede determinar el tiempo transcurrido entre la emisión del haz incidente y la recepción del eco y que la velocidad del ultrasonido en el medio es conocida. Para determinar el tiempo entre la emisión y recepción del eco se re10 curre a la modalidad pulsada de emisión-recepción (ver punto 13) . de esta manera el equipo toma el tiempo que transcurre entre el comienzo de pulso de emisión y el momento en que se recibe el eco.(Fig. 5) Conociendo este tiempo y la velocidad del ultrasonido, por un cálculo sencillo, puede determinarse la distancia que media entre el trasductor y la estructura reflectora : d= v ⋅ t = 770 × t 2 donde : d = distancia en metros v = velocidad del ultrasonido en el organismo (en m/seg) t = tiempo transcurrido entre la emisión del haz incidente y la recepción del eco.( en segundos) 10 Con la modalidad continua no es posible hacerlo porque siendo continuas, tanto la emisión como la recepción, no se puede determinar en qué momento se emitió el haz que se recibe en un momento determinado. 165 Fig. 20 La máxima distancia (profundidad) que puede explorarse no está limitada solamente por la frecuencia del haz ultrasónico sino también por la frecuencia de repetición del pulso (PRF), porque cuando mayor es ésta, menor es el tiempo que el cristal está en la modalidad de recepción y, por lo tanto, los ecos proveniente de las estructuras más profundas puede llegar al trans ductor cuando el cristal ya ha dejado de estar en el modo de recepción. Cuando se opera, en el equipo, sobre el control de profundidad; lo que se está haciendo, en realidad, es modificar el PRF. En la tabla VI se muestran las máximas profundidades que pueden explorarse a diversas PRF. ( no debe olvidarse que esto es posible siempre y cuando la frecuencia ultrasónica lo permita: Tabla VI PRF(kHz) Máxima profundidad(cm) 1 77 2 38.5 5 15.4 10 7.7 20 3.85 Se estima que pueden conseguirse buenos ecos (esto significa buena penetración del haz) hasta profundidades que alcancen una distancia 200 veces superiores a la longitud de onda del ultrasonido ( la longitud de onda es inversamente proporcional a la frecuencia), por lo tanto será mayor cuando menor es la frecuencia. Si bien es mas gravitante el factor frecuencia del ultrasonido, el PRF juega un papel muy importante en la calidad de registros de Doppler pulsado. Otro factor condicionante de la imagen de estructuras anatómicas Resolución axial, que es la capacidad de detectar la menor distancia dos interfases que se encuentran en la trayectoria del haz, en otras bras, la mínima distancia entre dos puntos. Esta resolución depende 166 es la entre palade la duración del pulso ultrasónico, es mayor cuando menor es la duración de dicho pulso. Fig 21. Se representan 2 situaciones, en ambas el transductor atraviesa tres medios encontrando, por lo tanto, dos interfases, una entre el primero y el segundo y otra entre el segundo y el tercero. En el primer caso (superior) el transductor emite un pulso ultrasónico de corta duración recibiendo dos ecos ( uno correspondiente a cada interfase). En el Segundo caso (inferior) se emite un pulso más prolongado que da como resultado un solo eco. La resolución es mayor en el primer caso, puesto que se ha conseguido identificar ambas interfases como estructuras diferentes. Se considera aceptable una duración del pulso de 1 microsegundo. La imagen también está condicionada por otro factor: la resolución lateral , que es la capacidad de discriminar la mínima distancia entre una interfase que se halla en la trayectoria del haz y otra que no lo está. Esta resolución depende de la sección (ancho) y del enfoque del haz. (figs. 22 y 23) Conocidos ya los aspectos básicos que hacen que el equipo adquiera la información pertinente con respecto a la detección de interfases (presencia de la estructura) y determinación de su profundidad, se requiere aún información acerca de la Ecogenicidad de la interfase explorada. La ecogenicidad de una interfase, desde el punto de vista físico, es la magnitud de la energía del eco generado por la interfase en relación a la energía portada por el rayo incidente. Cómo puede determinarse esta energía y medirla? La energía portada por una onda es el producto de su amplitud por su frecuencia pero, como sabemos, la frecuencia de la onda ultrasónica, es constante para este tipo de estudios, de manera que no puede variar con los cambios de intensidad de la onda, el único factor de variación de la in formación recibida será la amplitud. Es por eso que, desde el punto de vista del procesamiento ultrasonográfico, la ecogenicidad se establece en función de la Amplitud del eco recibido. 167 Fig 22. Uno de los factores importantes para juzgar la calidad de un transductor es el grado de enfoque del ultrasonido emitido por el cristal. Cuando el cristal es excitado por la corriente emite rayos ultrasónicos en todas la direcciones, pero existe en el transductor (detrás del cristal) un sistema de enfoque, que tiende a que todos los rayos producidos por el cristal sean emitidos en la misma dirección. El enfoque óptimo se consigue cuando todos los rayos emergen paralelos. Los defectos de un mal enfoque se acrecientan a medida que el haz se profundiza en el organismo. Fig 23. Se compara los efectos de resolución lateral entre un haz de enfoque deficiente y el haz óptimo. Los cuadros negros representa dos interfases. El eje de exploración del transductor (trayectoria teórica del haz) se representa con la línea horizontal terminada en flecha. Puede observarse que, verdaderamente, sólo una de ellas se encuentra en el trayecto del haz. En el caso del haz pobremente enfocado (superior) la desviación de los rayos ultrasónico hace que también alcancen la interfase que está fuera de la trayectoria, el resultado es que el transductor recibe dos ecos, uno correspondiente a cada interfase, como si ambas estuvieran en la misma línea (información errónea); en cambio, un transductor con haz bien enfocado solamente alcanza a la interfase que se encuentra en la trayectoria de exploración y no la que se halla fuera de ella. El resultado es que el transductor recibe un solo eco.(información correcta) Para disponer de toda la información necesaria, entonces, el eco guarda, para cada eco recibido, el valor de su amplitud. 168 Con respecto a la medición para otorgar el valor de la amplitud del eco recibido (escala), el equipo, de acuerdo a sus características constructivas y a las pretensiones del operador puede utilizar escalas de mayor o menor resolución, es decir escalas que dividan la variación de amplitud, a partir de cero (ausencia de eco) hasta la máxima amplitud capaz de recibirla sin distorsión ( esto también depende de las características constructivas del equipo). Este rango de amplitudes puede, entonces, dividirse en un número determinado de intervalos que son los que conocemos como escalas de grises. Cuando los intervalos son de 16 se dice que tienen 16 tonos de gris, 256 intervalos es 256 tonos de gris. Cuando menor número de intervalos tiene la escala menor es la resolución de ecogenicidad ( diferencias de amplitud). Fig 24. En la figura se observan dos conjuntos de ecos con amplitudes crecientes ( una serie arriba y otra abajo). En la serie de arriba todo el rango de amplitudes es agrupada en 8 intervalos (8 tonos de gris) que van del negro al blanco. En la serie inferior este mismo rango es agrupado en 32 intervalos (32 tonos de gris) Como podrá observarse, en ambos casos ecos de amplitudes ligeramente diferentes son agrupados en un mismo intervalo, es decir que hay una pérdida de discriminación entre estas amplitudes y esta pérdida es mayor cuando menor número de intervalos tiene la escala (tonos de gris). En la franja de debajo de cada serie se observan los tonos posibles(para cada escala) que serán representados en la pantalla. También puede observarse que la variación de tonos es mas suave (serie inferior) cuando mayor es el número de tonos de gris de la escala). Es decir, la resolución de amplitud ( discriminación de ecogenicidad) , que está directamente relacionada con los tonos de gris, es mayor cuando mayor es el número de intervalos de la escala. Conclusión: de esta manera el equipo a operado como: o Un conversor de tiempo a distancia o Un conversor de amplitud a ecogenicidad tisular 169 Presentación de la información ( interfase de salida) Para ofrecer al médico la información obtenida acerca de las estructuras anatómicas el equipamiento utiliza imágenes, en la forma de señales de monitor o fotografías, es decir : imágenes en un plano. Las imágenes están constituidas por un conjunto de puntos cuya ubicación y luminosidad (tono de gris) están dadas por la posición y ecogenicidad de la interfases detectadas, respectivamente. Características y parámetros en imágenes. Las imágenes anatómicas son presentadas por medio de la manipulación de dos parámetros que se refieren a las interfases representadas: 1.- Distancia (profundidad) 2.- Brillo (ecogenicidad) La representación de distancia puede realizarse en una o dos dimensiones: Representación en una dimensión : con base en la información de distancia y ecogenicidad obtenida en la dirección de exploración del eco, se representan puntos en una misma línea de la pantalla, cuyo brillo será proporcional a la ecogenicidad de la interfase representada (amplitud de eco recibido).Para comprender mejor la formación de la imagen recurriremos a uno de los modos iniciales en la representación ecográfica el modo amplitud.(fig. 25) Emisión Recepción modo brillo Fig. 25. Esta forma de representación de las interfases es la que se usa en la construcción de la imágenes modo M. Este modo utiliza una sola dimensión del plano (el eje horizontal (x) o el vertical (y)). En los equipos modernos es habitual que el eje utilizado sea el 170 vertical, de manera que la profundidad aumenta de arriba hacia abajo; la segunda dimensión del plano (habitualmente la horizontal) es utilizada para representar el tiempo en el que se han obtenido los datos de las interfases, de manera que de izquierda a derecha se suceden posiciones de puntos sobre el eje vertical que corresponden a las posiciones de las estructuras en el transcurso del tiempo. Esto permite apreciar los movimientos de la interfase durante el estudio. (fig. 26) Fig. 26. El haz a su paso por la estructura estudiada, a nivel de cada interfase, se refleja produciéndose ecos de diferentes intensidades (amplitudes) dependientes de la ecogenicidad de las correspondientes interfases, estos ecos se representan en amplitud y tiempo en la línea de abajo. Esta misma representación, pero en amplitud – distancia es representada en la pantalla del monitor ( o fotografía), constituyendo lo que se a denominado modo amplitud o brillo (pantalla de la derecha). Si consideráramos que a esta imagen podemos rotarla 90 grados en el sentido que marca la flecha curva (a) , veríamos nada más que sus puntas (representadas en la pantalla de la izquierda) que en la pantalla adquirirían un brillo (tono de gris) proporcional a su amplitud, este modo de presentación se ha denominado modo B (derivado de brillo) pero, actualmente el modo B se refiere a bidimensionalidad. Este es el primer paso a la representación de imágenes. Representación en dos dimensiones : para poder apreciar la morfología y dimensiones de las estructuras anatómicas que están siendo exploradas no basta con tener sólo información de una línea de exploración, puesto que esto no permite conocer en que nivel de las mismas se está realizando la exploración ni conocer su forma, dimensiones, etc. Para aportar mejor in formación morfológica se utiliza la representación o Modo Bidimensional. Como es sabido, un plano puede ser considerado como un conjunto de líneas rectas alineadas (fig 27.a); utilizando este concepto se recurre a utilizar múltiples líneas de exploración alineadas para construir la imagen en un plano( fig 27.c), que presenta la silueta del órgano en el plano de corte. 171 a b c Fig. 27. Múltiples líneas de exploración producidas secuencialmente y alineadas detectan las líneas de Interfase entre las estructuras y los medios circundantes, dibujando la silueta del órgano en el plano de corte. En esta modalidad de presentación ambas dimensiones del plano representan distancia y la representación en movimiento se produce por la sucesión de imágenes bidimensionales. Bibliografía: Taylor K, Burns P, Wells,P. Clinical aplications of doppler ultrasound.S4econd Editio. Raven Press.New York. 1995. Marcus M, Schelbert H., Askorton D., Wolf G. Cardiac imaging. a companion to braunwald´s heart disease. 3 rd ed. W.B. Saunders Company. Philadelphia.1988. Sears F, Zemansky M., Física general.Quinta edición.Aguilar. Madrid.1973 Miákishev G, Bújovsev. Física 4. Editorial Mir Moscú. Moscú. 1986 Miguel C. Física. 24ª. Edición. El ateneo.Buenos Aires.1993 Frumento A., Biofísica. Tercera edición.Mosby/Doyma Libros. Madrid.1995 172