Valores y vectores propios
Anuncio

Optimización
Optimización Sin Restricciones
Dr. E Uresti
ITESM
Optimización Sin Restricciones
Profr. E. Uresti - p. 1/38
Introducción
En esta sección se verá un método analítico para optimizar una
función real en el caso que no existan restricciones sobre el
dominio de la función y cuando la función admite segundas
derivadas continuas. Esta técnica generaliza la técnica de
optimización de funciones en una variable utilizando cálculo
diferencial: primeramente se determina cuáles son los candidatos a
óptimos, y posteriormente se aplica un criterio basado en la
segunda derivada para determinar si corresponden a un máximo o
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
mínimo relativo. Primeramente definiremos los puntos críticos, que
son los únicos puntos candidatos a óptimos de la función. Seguido
de esto, se formula el principal resultado que caracteriza los puntos
máximos y mínimos locales e ilustraremos el proceso de
optimización con un par de ejemplos detallados hechos a mano y
usando la calculadora TI. En la última sección se listan los
resultados teóricos que son los argumentos necesarios para el
teorema que caracteríza los óptimos locales.
Optimización Sin Restricciones
Profr. E. Uresti - p. 2/38
Óptimos de una Función
Definición
Sea f una función de valor real definida sobre un
conjunto D ⊆ Rn . Sea x0 un punto en D , x0 se
dice un mínimo local de f si existe d > 0 tal que si
x ∈ D y |xo − x| < d entonces f (x) ≥ f (x0 ). Por
otro lado, se dice máximo local si se cumple
f (x) ≤ f (x0 ). En general, el concepto óptimo local
se refiere a mínimos o máximos locales. El valor
del óptimo local x0 es f (x0 ).
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 3/38
Punto Crítico o Estacionario
Definición
Sea f una función de valor real definida sobre un
conjunto D ⊆ Rn . Un punto x0 ∈ D se llama punto
estacionario o punto crítico si todas las parciales
de f se hacen cero cuando se evaluan en x0 . Es
decir, si
∇f (x0 ) = 0
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 4/38
Teorema Clave
Teorema
Sea f : D ⊆ Rn → R. Suponga que f tiene
segundas derivadas parciales continuas en
D. Si x0 es un punto estacionario de f
entonces f tiene en x0 . . .
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 5/38
Teorema Clave
Teorema
Sea f : D ⊆ Rn → R. Suponga que f tiene
segundas derivadas parciales continuas en
D. Si x0 es un punto estacionario de f
entonces f tiene en x0 . . .
■ un mínimo local si Hf (x0 ) es positiva
definida. (Todos los valores propios de
Hf (x0 ) son positivos)
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 5/38
Teorema Clave
Teorema
Sea f : D ⊆ Rn → R. Suponga que f tiene
segundas derivadas parciales continuas en
D. Si x0 es un punto estacionario de f
entonces f tiene en x0 . . .
■ un mínimo local si Hf (x0 ) es positiva
definida. (Todos los valores propios de
Hf (x0 ) son positivos)
■ un máximo local si Hf (x0 ) es negativa
definida. (Todos los valores propios de
Hf (x0 ) son negativos)
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 5/38
Teorema Clave
Teorema
Sea f : D ⊆ Rn → R. Suponga que f tiene
segundas derivadas parciales continuas en
D. Si x0 es un punto estacionario de f
entonces f tiene en x0 . . .
■ un mínimo local si Hf (x0 ) es positiva
definida. (Todos los valores propios de
Hf (x0 ) son positivos)
■ un máximo local si Hf (x0 ) es negativa
definida. (Todos los valores propios de
Hf (x0 ) son negativos)
■ un punto silla si Hf (x0 ) tiene valores
propios negativos y también positivos.
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 5/38
Ejemplo 1: Clasificación de puntos
Para la función:
f (x, y) = 27 x −
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
1 3
x − 2 y2 + y4
9
clasifique los siguientes puntos:
a) P (−3, 1)
b) Q (9, −1)
c) R (−9, 1)
d) S (9, 0)
e) T (−9, 0)
respecto a las opciones:
1) Punto crítico: mínimo relativo
2) Punto crítico sin información por el criterio de la Hessiana
3) No punto crítico
4) Punto crítico: máximo relativo
5) Punto crítico: punto silla
Optimización Sin Restricciones
Profr. E. Uresti - p. 6/38
Solución
La idea es sustituir cada uno de los puntos en el gradiente para
determinar si el punto es punto crítico. Sólo en caso de serlo,
debemos sustituir en la Hessiana para ver si es máximo o mínimo
local. En nuestro ejemplo
1
3
x2
fx
=
27 −
fy
=
−4 y + 4 y 3
∇f
=
< 27 −
1
3
x2 , −4 y + 4 y 3 >
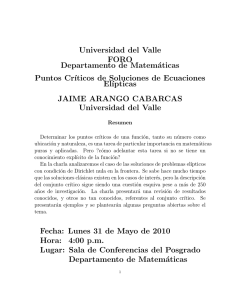
En la figura 1 se ilustra: limpieza de las variables, la captura de
f (x, y) y la obtención de las parciales.
Figura 1: Registro de f (x, y), fx y fy
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 7/38
En las pantallas de la figura 2 se registran la captura de los puntos en la variable p
y el cálculo de la matriz hessiana.
Figura 2: Registro de puntos y Cálculo de la hessiana
Optimización Sin Restricciones
Profr. E. Uresti - p. 8/38
Análisis de P (−3, 1)
Como
∇f (P ) =< 24, 0 >6=< 0, 0 >
P (−3, 1) no es un punto crítico y por tanto no puede ser ni máximo
ni mínimo relativo. En la figura 3 se ilustra la sustitución del punto
P (−3, 1) y del Q(9, −1) en ∇f .
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Figura 3: Cálculo de ∇f (P ) y de ∇f (Q)
Optimización Sin Restricciones
Profr. E. Uresti - p. 9/38
Análisis de Q (9, −1)
Como
∇f (Q) =< 0, 0 >
por tanto, Q(9, −1) es un punto crítico. Revisemos el criterio de la
segunda derivada:
−6 0
Hf (Q) =
0
8
y así los eigenvalores propios de Hf (Q) son -6 y 8. Por tanto, el
punto Q(9, −1) es un punto silla. Los cálculos se ilustran en la
figura 4.
Figura 4: Criterio en Q(9, −1).
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 10/38
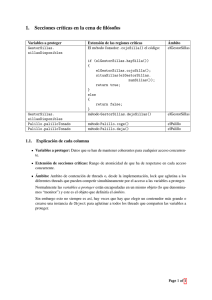
Análisis de R (−9, 1)
Como
∇f (R) =< 0, 0 >
por tanto, Q(−9, 1) es un punto crítico. Revisemos el criterio de la
segunda derivada:
6 0
Hf (R) =
0 8
y aís los eigenvalores propios de Hf (R) son 6 y 8. Por tanto, el
punto R(−9, 1) es un mínimo relativo. Los cálculos se ilustran en la
figura 5.
Figura 5: Criterio en R(−9, 1).
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 11/38
Análisis de S (9, 0)
Como
∇f (S) =< 0, 0 >
por tanto, S(9, 0) es un punto crítico. Revisemos el criterio de la
segunda derivada:
−6
0
Hf (S) =
0
−4
y así los eigenvalores propios de Hf (S) son -6 y -4. Por tanto, el
punto S(9, 0) es un máximo relativo. Los cálculos se ilustran en la
figura 6.
Figura 6: Criterio en S(9, 0).
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 12/38
Análisis de T (−9, 0)
Como
∇f (S) =< 0, 0 >
por tanto, T (−9, 0) es un punto crítico. Revisemos el criterio de la
segunda derivada:
6 0
Hf (T ) =
0 8
y así los eigenvalores propios de Hf (T ) son 6 y 8. Por tanto, el
punto T (−9, 0) es un mínimo relativo. Los cálculos se ilustran en la
figura 7.
Figura 7: Criterio en T (−9, 0).
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 13/38
Notas
Observe en las pantallas de la TI el uso de la
variable i: este truco permite el reuso de las
entradas anteriores evitando así el volver a escribir
los comandos, para ello basta volver a localizar el
comando utilizando el cursor.
Observe también el comando | utilizado para
sustituir valores por variables en una expresión sin
necesidad de hacer una asignación.
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 14/38
Ejemplo 2
Ejemplo
Analice la función: f : R2 → R definida por:
f (x, y) = x3 + y 3 − 3 x y
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 15/38
Ejemplo 2
Ejemplo
Analice la función: f : R2 → R definida por:
f (x, y) = x3 + y 3 − 3 x y
Solución
Determinemos primero los puntos críticos. Para
ello determinemos el gradiente de la función:
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
∇f (x) =< 3 x2 − 3 y, 3 y 2 − 3 x >′
Optimización Sin Restricciones
Profr. E. Uresti - p. 15/38
Ejemplo 2
Ejemplo
Analice la función: f : R2 → R definida por:
f (x, y) = x3 + y 3 − 3 x y
Solución
Determinemos primero los puntos críticos. Para
ello determinemos el gradiente de la función:
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
∇f (x) =< 3 x2 − 3 y, 3 y 2 − 3 x >′
Los puntos críticos satisfacen ∇f (x) =< 0, 0 >′ ,
por tanto:
Optimización Sin Restricciones
Profr. E. Uresti - p. 15/38
Ejemplo 2
Ejemplo
Analice la función: f : R2 → R definida por:
f (x, y) = x3 + y 3 − 3 x y
Solución
Determinemos primero los puntos críticos. Para
ello determinemos el gradiente de la función:
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
∇f (x) =< 3 x2 − 3 y, 3 y 2 − 3 x >′
Los puntos críticos satisfacen ∇f (x) =< 0, 0 >′ ,
por tanto:
3 x2 − 3 y = 0 y 3 y 2 − 3 x = 0
Optimización Sin Restricciones
Profr. E. Uresti - p. 15/38
De donde:
x2 − y = 0 y y 2 − x = 0
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 16/38
De donde:
x2 − y = 0 y y 2 − x = 0
Despejando y de la primera y sustituyendo en la
segunda obtenemos:
(x2 )2 −x = x4 −x = x (x3 −1) = x (x−1) (x2 +x+1) = 0
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 16/38
De donde:
x2 − y = 0 y y 2 − x = 0
Despejando y de la primera y sustituyendo en la
segunda obtenemos:
(x2 )2 −x = x4 −x = x (x3 −1) = x (x−1) (x2 +x+1) = 0
Las raíces son
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
1 1 √
1 1 √
x1 = 0, x2 = 1, x3 = + i 3, x4 = − i 3
2 2
2 2
Optimización Sin Restricciones
Profr. E. Uresti - p. 16/38
De donde:
x2 − y = 0 y y 2 − x = 0
Despejando y de la primera y sustituyendo en la
segunda obtenemos:
(x2 )2 −x = x4 −x = x (x3 −1) = x (x−1) (x2 +x+1) = 0
Las raíces son
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
1 1 √
1 1 √
x1 = 0, x2 = 1, x3 = + i 3, x4 = − i 3
2 2
2 2
Puesto que estamos sólo interesados en las
raíces reales, sólo consideraremos a x1 = 0 y
x2 = 1.
Optimización Sin Restricciones
Profr. E. Uresti - p. 16/38
Los puntos críticos quedan: (como y = x2 ):
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 17/38
Los puntos críticos quedan: (como y = x2 ):
■ x = 0
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 17/38
Los puntos críticos quedan: (como y = x2 ):
■ x = 0 , y = 0: P (0, 0)
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 17/38
Los puntos críticos quedan: (como y = x2 ):
■ x = 0 , y = 0: P (0, 0)
■ x = 1
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 17/38
Los puntos críticos quedan: (como y = x2 ):
■ x = 0 , y = 0: P (0, 0)
■ x = 1 , y = 1: Q(1, 1)
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 17/38
Los puntos críticos quedan: (como y = x2 ):
■ x = 0 , y = 0: P (0, 0)
■ x = 1 , y = 1: Q(1, 1)
El siguiente paso es determinar cuáles son
máximos o mínimos relativos y cuáles puntos silla.
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 17/38
Los puntos críticos quedan: (como y = x2 ):
■ x = 0 , y = 0: P (0, 0)
■ x = 1 , y = 1: Q(1, 1)
El siguiente paso es determinar cuáles son
máximos o mínimos relativos y cuáles puntos silla.
Para ello determinemos la matriz Hessiana de f :
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 17/38
Los puntos críticos quedan: (como y = x2 ):
■ x = 0 , y = 0: P (0, 0)
■ x = 1 , y = 1: Q(1, 1)
El siguiente paso es determinar cuáles son
máximos o mínimos relativos y cuáles puntos silla.
Para ello determinemos la matriz Hessiana de f :
"
#
6x −3
Hf (x) =
−3 6y
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 17/38
Para P (0, 0):
"
Hf (P ) =
0 −3
−3 0
Optimización Sin Restricciones
#
→ Valores propios: − 3, 3
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 18/38
Para P (0, 0):
"
Hf (P ) =
0 −3
−3 0
#
→ Valores propios: − 3, 3
Da signos intercambiados: P (0, 0) es punto silla.
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 18/38
Para P (0, 0):
"
Hf (P ) =
0 −3
−3 0
#
→ Valores propios: − 3, 3
Da signos intercambiados: P (0, 0) es punto silla.
Para Q(1, 1):
"
Hf (Q) =
6 −3
−3 6
Optimización Sin Restricciones
#
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
→ Valores propios: 9, 3
Profr. E. Uresti - p. 18/38
Para P (0, 0):
"
Hf (P ) =
0 −3
−3 0
#
→ Valores propios: − 3, 3
Da signos intercambiados: P (0, 0) es punto silla.
Para Q(1, 1):
"
Hf (Q) =
6 −3
−3 6
#
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
→ Valores propios: 9, 3
Todos positivos: Q(1, 1) es punto mı́nimo relativo.
Optimización Sin Restricciones
Profr. E. Uresti - p. 18/38
Para terminar de convencernos de que
efectivamente el criterio es válido tomemos el
punto P (0, 0). La matriz Hessiana tuvo valores
propios α1 = 3 y α2 = −3. Tomemos el valor propio
α1 . Para este valor propio de Hessiana evaluada
en P (0, 0) tiene como vector propio v1 =< 1, −1 >:
esta dirección define en el punto P (0, 0) a la recta
y = −x. Si sobre esta recta consideramos a la
función f (x, y) tenemos:
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
F (x) = f (x, y = −x) = x3 + (−x)3 − 3x(−x) = 3 x2
Si analizamos esta función efectivamente
descubriremos que en x = 0 la función tiene un
mínimo.
Optimización Sin Restricciones
Profr. E. Uresti - p. 19/38
Para terminar de convencernos de que
efectivamente el criterio es válido tomemos el
punto P (0, 0). La matriz Hessiana tuvo valores
propios α1 = 3 y α2 = −3. Tomemos el valor propio
α1 . Para este valor propio de Hessiana evaluada
en P (0, 0) tiene como vector propio v1 =< 1, −1 >:
esta dirección define en el punto P (0, 0) a la recta
y = −x. Si sobre esta recta consideramos a la
función f (x, y) tenemos:
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
F (x) = f (x, y = −x) = x3 + (−x)3 − 3x(−x) = 3 x2
Si analizamos esta función efectivamente
descubriremos que en x = 0 la función tiene un
mínimo. Resumiendo: en el punto P (0, 0) y en la
dirección v1 =< 1, −1 > la función f (x, y) tiene un
minimo.
Optimización Sin Restricciones
Profr. E. Uresti - p. 19/38
Por otro lado, para el valor propio α2 = −3 la
Hessiana evaluada en P (0, 0) tiene como vector
propio v2 =< 1, 1 >: esta dirección define en el
punto P (x, y) la recta y = x. Si sobre esta recta
consideramos la función f (x, y) tenemos
G(x) = f (x, y = x) = x3 + (x)3 − 3x (x) = 2 x3 − 3 x2
Si analizamos esta función efectivamente
descubriremos que en x = 0 la función tiene un
máximo en x = 0.
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 20/38
Por otro lado, para el valor propio α2 = −3 la
Hessiana evaluada en P (0, 0) tiene como vector
propio v2 =< 1, 1 >: esta dirección define en el
punto P (x, y) la recta y = x. Si sobre esta recta
consideramos la función f (x, y) tenemos
G(x) = f (x, y = x) = x3 + (x)3 − 3x (x) = 2 x3 − 3 x2
Si analizamos esta función efectivamente
descubriremos que en x = 0 la función tiene un
máximo en x = 0. Resumiendo: en el punto
P (0, 0) y en la dirección v2 =< 1, 1 > la función
f (x, y) tiene un máximo.
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 20/38
Por otro lado, para el valor propio α2 = −3 la
Hessiana evaluada en P (0, 0) tiene como vector
propio v2 =< 1, 1 >: esta dirección define en el
punto P (x, y) la recta y = x. Si sobre esta recta
consideramos la función f (x, y) tenemos
G(x) = f (x, y = x) = x3 + (x)3 − 3x (x) = 2 x3 − 3 x2
Si analizamos esta función efectivamente
descubriremos que en x = 0 la función tiene un
máximo en x = 0. Resumiendo: en el punto
P (0, 0) y en la dirección v2 =< 1, 1 > la función
f (x, y) tiene un máximo. De estos dos análisis
concluimos que efectivamente la función f (x, y)
tiene un punto silla en P (0, 0): Hay una dirección
donde el punto se ve como mínimo y hay otra
donde se ve como máximo.
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 20/38
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Optimización Sin Restricciones
Figura 8: Graficas de F (x) y de G(x)
Profr. E. Uresti - p. 21/38
Repitamos los cálculos en la TI. En la figura 9 se ilustra: la limpieza
de las variables x y y; el registro de la función f ; el cálculo de las
parciales de f ; y la determinación de los puntos críticos.
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Figura 9: Preparación para el ejemplo 2.
Optimización Sin Restricciones
Profr. E. Uresti - p. 22/38
En la figura 10 se ilustra la salida de la solución del sistema de
ecuaciones que define los puntos críticos. Por conveniencia, se
recomienda utilizar el comando exp◮list para convertir la solución
dada por la calculadora en un formato más fácil de manipular.
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Figura 10: Puntos críticos de f .
Optimización Sin Restricciones
Profr. E. Uresti - p. 23/38
En la figura 11 se ilustra la salida del comando exp◮list el cual es
una matriz donde las raíces están por renglones y el orden en las
columnas está relacionado con el orden del segundo argumento de
exp◮list. También se ilustra parcialmente el registro de la Hessiana
de f en la variable h.
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Figura 11: Salida de exp◮list y cálculo de Hf .
Optimización Sin Restricciones
Profr. E. Uresti - p. 24/38
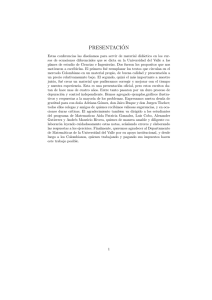
En las pantallas de la figura 12 se muestran los resultados de sustituir los puntos
en la matriz Hessiana de f y el cálculo de sus eigenvalores. Recuerde que el
primer renglón contiene las componentes del punto Q(1, 1), mientras que el
segundo renglón las de P (0, 0). Estos resultados confirman que Q(1, 1) es un
mínimo relativo y que P (0, 0) es un punto silla.
Figura 12: Análisis de Q(1, 1) (p[1]) y de P (0, 0) (p[2]).
Optimización Sin Restricciones
Profr. E. Uresti - p. 25/38
Algunos comandos en la TI
En esta lectura usamos ciertos comandos que
quizá merecen una explicación:
■
DelVar
■
exp◮list
■
|
■
d
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 26/38
DelVar
var1, var2, var3, . . .
Este comando se usa para limpiar variables y es útil cuando se
desea construir una expresión matemática que involucra a ciertas
variables. Previo a definir la expresión se debe invocar este
comando. Ud. puede teclear directamente la palaba delvar con
minúsculas y su calculadora reconocerá el comando DelVar. Este
comando puede ser invocado con una o variables variables. En
caso de ser varias, éstas deben ir separadas por comas: los
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
espacios no son necesarios. Este comando equivale entrar al
var-link
y limpiar la o las variables declaradas.
Optimización Sin Restricciones
Profr. E. Uresti - p. 27/38
exp◮list(exp, {var1, var2, var3, . . .})
Este comando es útil para convertir las soluciones a un sistema de
ecuaciones que proporciona la calculadora TI en una matriz cuyos
renglones son cada una de las raíces. Se asume que exp es una
expresión del tipo
var1 = v11 and var2 = v12 and · · · and varN = v1N
or
..
.
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
or
var1 = vM 1 and var2 = vM 2 and · · · and varN = vM N
la cual es precisamente la forma de la salida del comando solve. La
invocación de este comando crea la matriz:
v11
v12 · · ·
v1N
..
.
..
..
.
.
.
.
.
vM 1 vM 2 · · · vM N
Optimización Sin Restricciones
Profr. E. Uresti - p. 28/38
Hay dos maneras de conseguir el comando exp◮list. Una manera
es ingresar desde catalog ( 2nd
2 , en la TI voyage 200) y luego
moviéndose con las flechas hasta localizar la función (se puede
presionar la letra e para moverse al principio de las funciones que
inician con e y después continuar con el movimiento del cursor). La
otra consiste en teclear directamente el comando ubicando
adecuadamente el caracter ◮ en el teclado ( 2nd
Y , en la TI
voyage 200).
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Otra cosa importante de notar es que el orden de los valores en la
columna va acorde con el orden declarado en el segundo
argumento (exp, {var1, var2, var3, . . .}) y no con el orden de
aparición de las variables en la solución.
Optimización Sin Restricciones
Profr. E. Uresti - p. 29/38
exp | var1 = v1 and var2 = v2 and · · ·
Esta construcción permite sustituir los valores vi de las variables
vari en exp. Esto es muy conveniente pues no ocurre una
asignación de las variables que puedan contaminar los siguientes
cálculos. El caracter | se obtiene en la TI voyage 200 con la
combinación 2nd
K.
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 30/38
d (exp, var) o d (exp, var, n)
Este comando se usa para calcular derivadas de exp respecto a la
variable var. El tercer argumento opcional n indica el número de
veces consecutivas que se deriva exp. Note la diferencia entre
escribir la letra d y y el comando d : El comando de derivación se
obtiene en el menú de math en el submenú calculus, o con las teclas
2nd 8 en la TI voyage 200.
Optimización Sin Restricciones
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Profr. E. Uresti - p. 31/38
Resultados requeridos
La teoría detrás de este método de optimización se basa en ciertos
resultados sobre matrices y otros referentes a cálculo. El siguiente
resultado es uno de los más importantes del álgebra lineal y es
conocido como el teorema espectral. Una de las cosas
soprendentes es que un concepto simple como el de simetría de
una matriz pueda tener repercusiones tan importantes. La
demostración de este resultado viene en el teorema 8.8 del libro de
A. Basilevsky (1983): Applied Matrix Algebra in Statistical Sciences
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
(North-Holland, New York). Los resultados sobre cálculo se
relacionan con el desarrollo de Taylor (series de potencias) de una
función en variables.
Optimización Sin Restricciones
Profr. E. Uresti - p. 32/38
Teorema
Sea A una matriz n × n simétrica. Entonces todos los
valores propios de A son reales y existe para Rn una base
ortogonal formada por vectores propios de A. Más aún, si
x1 , x2 ,. . . ,xn forman una base ortogonal de vectores
propios asociados a los valores propios λ1 ,λ2 ,. . . ,λn
respectivamente entonces si P es la matriz cuya columna i
es el vector xi y D es la matriz diagonal cuyo elemento (i, i)
es λi , entonces
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
A = P D P′
Bajo el supuesto de segundas derivadas parciales continuas de
una función en varias variables f , el teorema de Clairaut afirma que
las derivadas parciales cruzadas son iguales y por tanto la matriz
hessiana Hf es simétrica. Y por tanto, evaluada en cualquier punto
tendrá todos sus valores propios reales.
Optimización Sin Restricciones
Profr. E. Uresti - p. 33/38
El teorema espectral tiene un impacto inmediato sobre funciones
llamadas formas cuadráticas:
Teorema
Sea A = [aij ] una matriz n × n simétrica. Si definimos la
forma cuadrática en la variable x =< x1 , x2 , . . . , xn >
Q(x) = x′ Ax =
n X
n
X
aij xi xj
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
i=1 j=1
entonces:
■ Q(x) > 0 para toda x 6= 0 si y sólo si todos los valores
propios de A son positivos.
■
Q(x) < 0 para toda x 6= 0 si y sólo si todos los valores
propios de A son negativos.
Optimización Sin Restricciones
Profr. E. Uresti - p. 34/38
Demostración
Por el teorema espectral existen C ortogonal y D
diagonal n × n tal que A = C′ D C por
consiguiente
Q(x) = x′ A x = x′ C′ D C x = (Cx)′ D (C x)
Si definimos y = C x entonces lo anterior queda:
Q(x) = y′ D y =
n
X
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
λi yi 2
i=1
Note que al ser C ortogonal, C es invertible y por
lo tanto x 6= 0 si y sólo si y 6= 0.
Optimización Sin Restricciones
Profr. E. Uresti - p. 35/38
Dado que calcular valores y vectores propios de una matriz es un
proceso numérico complejo, el siguiente resultado cambia el
proceso de la determinación de valores propios por el proceso
directo de cálculo de determinantes. La demostración de este
resultado vienen en la prueba del teorema 2.14.4 del libro de P.
Lancaster (1969): Theory of Matrices (Academic Press, New York).
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Teorema
Sea A una matriz simétrica n × n. A tiene todos sus valores
propios positivos si y sólo si todos los determinantes de las
matrices principales primeras son positivos, esto es
a11 a12 > 0, . . . , |A| > 0.
a11 > 0, a21 a22 Optimización Sin Restricciones
Profr. E. Uresti - p. 36/38
El teorema clave que da las condiciones suficientes que deben
cumplir los óptimos locales para ser máximos relativos, mínimos
relativos o puntos sillan se deduce de variantes del teorema de
Taylor que da el desarrollo de potencias de una función. La prueba
de este resultado aparece en la demostración del teorema 7.5.1 del
libro de A. Khuri (1993): Advanced Calculus with Applications in
Statistics (John Wiley and Sons, New York)
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
Teorema
Sea f : D ⊆ Rn → R y sea B(xo ) una vecindad de xo ∈ D
tal que B(xo ) ⊆ D. Si todas las parciales de f existen y son
continuas hasta orden ≤ r en B(xo ), entonces para
cualquier punto xo + x ∈ B(xo ) se cumple
r−1
X
1 ′ i
1 ′ r
f (xo + x) = f (xo ) +
x ∇ f (xo ) +
x ∇ f (zo )
i!
r!
i=1
donde zo está en la línea que une xo con xo + x.
Optimización Sin Restricciones
Profr. E. Uresti - p. 37/38
Demostración de la versión del teorema utilizada en la prueba de la
suficiencia de las condiciones para máximos, mínimos y puntos silla
y que se formula como sigue puede ser encontrada en la prueba
del teorema 9.4 del libro de T. Apostol (1980): Calculus, Volumen 2
(Reverté, Barcelona).
Teorema
Sea f (x) una función escalar definida en una n-bola B(x0 )
y con derivadas parciales de segundo orden continuas en
B(x0 ). Entonces para todo x0 + x ∈ B(x0 ) se tiene
Introducción
Óptimos locales
Punto crı́tico
Teorema Clave
Ejemplo 1
Ejemplo 2
Comandos TI
Bases
-Teorema Espectral
-F Cuadráticas
-Taylor
-Taylor 2nd
1
f (x0 +x)−f (x0 ) = ∇f (x0 ) • x+ x′ Hf (x0 ) x+kxk2 E2 (x0 , x)
2
donde E2 (x0 , x) → 0 cuando x → 0.
Del teorema anterior se deduce que en un punto crítico x0 el signo
de f (x0 + x) − f (x0 ) es el signo de x′ Hf (x0 ) x.
Optimización Sin Restricciones
Profr. E. Uresti - p. 38/38