- Ninguna Categoria
Regresores estocásticos no estacionarios
Anuncio
Econometría I. 3o LADE
Tema 3. Regresores estocásticos no estacionarios
1
Introducción
Todos los procesos analizados anteriormente fueron estudiados bajo la hipótesis de estacionariedad. Sin embargo, la mayoría de las variables utilizadas
en estudios de series temporales no presentan esta propiedad, sino que se
caracterizan mejor como procesos integrados. Especialmente ilustrativo en
este aspecto fue el trabajo de Nelson y Plosser (1982) donde se demuestra
que variables como Producto Interior Bruto, el Consumo o la Inversión de los
USA se pueden considerar como integrados. Este resultado puede extenderse
a la mayoría de los países desarrollados. Para el caso español también ocurre
lo mismo, como se puede apreciar en el Grá…co 4.1. En el se presenta la evolución del PIB español a precios de mercado en pesetas constantes del año
1990. Se observa en este grá…co la trayectoria creciente de esta variable en el
periodo XXX-XXX. Por tanto, no se puede aceptar que esta variable tenga
media constante a lo largo de todo el periodo, lo que hace que la hipótesis de
no estacionariedad no tenga gran soporte desde el punto de vista empírico.
Al margen de la propia evidencia empírica, desde el punto de vista de la
Teoría económica también es coherente la no estacionaridad de este tipo de
variables. Debemos pensar que si la mayoría de modelos macroeconómicos
admiten que las variables pueden crecer a lo largo del tiempo. Si además
tenemos en cuenta que en la mayoría de los modelos asumen que este crecimiento es constante a lo largo del tiempo, estamos diciendo que estas variable
pueden representarse de forma adecuada como procesos integrados de primer
orden.
No obstante, en otras ocasiones la no estacionariedad no tiene tanta argumentación desde el punto de vista económico. Ejemplos de ellos pueden
ser el tipo de cambio real entre dos monedas o el tipo de interés real de una
economía. Ambas magnitudes se consideran estacionarias en la mayoría de
los modelos teóricos.
Un ejemplo de proceso no estacionario es el denominado paseo aleatorio
con deriva. Este modelo se de…ne como sigue:
yt = ± + yt¡1 + ut
Sus propiedades fueron estudiadas en el tema anterior, donde vimos que
los momentos dependen de t. Por tanto, no es un proceso estacionario. Este
proceso se puede generalizar en un modelo ARIMA(p; d; q). Este proceso se
representa de la siguiente manera:
1
³
´
1 ¡ Á1 L ¡ ::: ¡ ÁpLp (1 ¡ L)d yt = ± + (1 + µ1 L + ::: + µq Lp ) ut
donde p y q son parámetros que nos son conocidos y d es el parámetro
que determina el orden de integración de la variable. Una forma alternativa
de presentar el modelo anterior es la siguiente:
³
´
1 ¡ Á1 L ¡ ::: ¡ Áp Lp zt = ± + (1 + µ1 L + ::: + µq Lp ) ut
donde zt = (1 ¡ L)d yt . Por tanto, observamos que la variable su…cientemente diferenciada sigue un proceso ARMA(p,q). No obstante, debemos
tener en cuenta que esto es sólo una forma de interpretar el modelo anterior
ya que la variable que estamos analizando es yt y no zt .
Si consideramos que existe un componente estacional, entonces podemos
hablar de procesos multiplicativos ARIMA(p; d; q) £ ARIMAs (P; D; Q)
©P (Ls ) Áp(L) (1 ¡ L)d (1 ¡ L)d yt = ± + £Q (Ls )µq (Ls ) ut
donde D es el orden de integración de la parte estacional que no tiene
por qué coincidir con d. Dado que el proceso no es estacionario, debemos en
primer lugar conseguir que sea estacionario diferenciado cuantas veces haga
falta. A continuación, será posible determinar el valor de los parámetro p, q,
P y Q. En la siguientes secciones vamos a discutir los diversos métodos que
existen para determinar el orden de integración de una variable.
2
Métodos no parámetricos para determinar
el orden de integración de un proceso
El orden de integración se puede determinar de diversas formas. Una de ella
es el uso de métodos no paramétricos. Estos métodos tienen la ventaja de
que no es necesario formular ninguna hipótesis ni calcular la distribución de
un estadístico bajo dicha hipótesis. Por contra, suelen ser bastante subjetivos
y no tan …ables como los métodos paramétricos. En cualquier caso, siempre
pueden darnos pistas sobre el orden de integración de la variable. En esta
sección vamos a considerar tres métodos alternativos: estudio de la función
de autocorrelación, sobrediferenciacón de la serie y estudio de la varianza
para diversos órdenes de integración. No es conveniente utilizarlos de forma
separada, sino que lo más habitual es usarlos conjuntamente. En lo que
sigue vamos a considerar que el proceso no tiene parte estacional, aunque
los resultados que vamos a obtener son directamente trasladables al caso
estacional.
2
2.1
Análisis de la función de autocorrelación
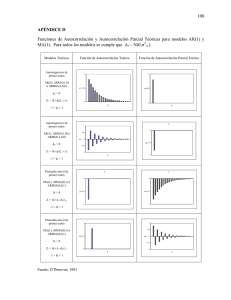
Supongamos que tenemos un proceso autorregresivo de orden 1. Su función
de autocorrelación es igual a ½(k) = Ák1 , 8k = 1; 2; ::. Esta función de autocorrelación decae hacia 0, pero sólo se anula en el in…nito. Entonces, el
decaimiento que se observa en la función de autocorrelación de la variable
depende del valor del parámetro Á1 . Si este toma, por ejemplo, un valor igual
a 0.5, entonces para k=5 el coe…ciente de la función de autocorrelación es
igual a 0:03. Por contra, si Á1 = 0:8, ½(5) = 0:33, mientras que la función de
autocorrelación toma el valor 0:03 cuando k = 16. Esto conlleva que cuanto
mayor es el valor del parámetro autorregresivo más lenta es la convergencia hacia 0 de la función de autocorrelación. Si consideramos el caso límite,
Á1 = 1, en el que el proceso no es estacionario, la función de autocorrelación
debería expresar un decaimiento muy lento hacia 0, con abundantes valores
distintos de 0.
Grá…co 4.1. FAC de un AR(1)
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
1
5
9
13
17
21
25
29
33
37
41
45
1
49
-0.2
-0.2
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
5
9
13
17
Á1 =0:5.
21
25
29
33
37
41
45
49
Á1 =0:8.
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
1
5
9
13
17
21
25
29
33
37
41
45
1
49
5
9
13
17
21
25
-0.2
-0.2
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
Á1 =0:9.
Á1=0:99
En el grá…co 4.1 se observa este fenómeno. A medida que se incrementa el
3
29
33
37
41
45
valor del parámetro Á1 el valor del primer coe…ciente de se aproxima hacia la
unidad y decaimiento de la función de autocorrelación es más lento. El caso
extremo es Á1 = 0:99, donde inlcuso para k=50 la función de autocorrelación
toma valores alejados de 0.
El problema que presenta este procedimiento es su subjetividad. No queda claro cuando podemos considerar que el primer valor del coe…ciente de
autocorrelación está su…cientemente próximo a la unidad, ¿basta con 0:7 o
tiene que ser igual a 0:9999?, cuando el valor está próximo a 0, ni cuanto valores de la función de autocorrelación deben ser distintos de 0 para considerar
que el decaimiento hacia 0 es lento.
2.2
Sobrediferenciación
La justi…cación de este método es la siguiente. Supongamos que tenemos un
proceso estacionario, un ruido blanco por ejemplo: yt = ut . Si tomamos
primeras diferencias, entonces el modelo se convierte en:
(1 ¡ L) yt = (1 ¡ L) ut
Esto lo podemos interpretar diciendo que la variable ¢yt sigue un proceso
MA(1) no invertible con parámetro µ1 = ¡1. Esta no invertibilidad nos está
indicado que el proceso está sobre diferenciado. Si tomamos en consideración
ahora la forma que adopta la función de autocorrelación de un MA(1), es
directo comprobar que el primer valor de esta función será igual a:
½(1) =
µ1
¡1
= ¡0:5
2 =
1+1
1 + µ1
y el resto de los valores serán iguales a 0. A partir de este resultado
particular, podemos sacar la conclusión para el caso general y decir que si la
serie que estamos analizando está sobrediferenciada, su función de autocorrelación exhibe un comportamiento de medias móviles con su primer valor
de la función de autocorrelación próximo a ¡0:5.
Entonces, el proceso a seguir es el siguiente. En primer lugar debemos
estudiar la función de autocorrelación de la serie en niveles. Si tenemos dudas sobre el decaimiento lento hacia 0, entonces debemos calcular la función
de autocorrelación para la variable diferenciada. Si ésta presenta un comportamiento similar al de un MA(1) con su primer coe…ciente próximo a -0.5
podemos concluir que está sobrediferenciada y concluir que la variable es estacionaria en niveles. En caso contrario, es posible concluir que la serie es
integrada.
4
2.3
Estudio de la varianza
Un método asociado al caso anterior es el estudio de la varianza de la variable para diversos órdenes de integración La justi…cación del método es la
siguiente. Supongamos que la variable está generada por un paseo aleatorio yt = yt¡1 + ut. La varianza de la variable yt es igual a V ar(yt) = t ¾2 .
POr tanto, es una varianza que tiene hacia in…nito. Si tomamos primeras
diferencias, el modelo anterior nos queda de la siguiente manera:
yt = yt¡1 + ut ) ¢yt = ut
Por tanto, es inmediato comprobar que la varianza de la variable en primeras diferencias es V ar(¢yt ) = ¾ 2 . Por último, si sobrediferenciamos la
variable anterior, el modelo queda así:
¢2 yt = ¢ut ) ¢2yt = ut ¡ ut¡1
De lo que se desprende que V ar(¢yt ) = V ar(ut ¡ ut¡1 ) = V ar(ut ) +
V ar(ut¡1 ) = 2 ¾2 :
En virtud de estos resultados, el procedimiento a seguir sería obtener
la varianza de la variable que estamos analizando para diversos valores del
parámetro d. El orden de integración seleccionado sería aquel para el que la
varianza de la variable se minimiza.
3
Contrastes de raíz unitaria
Los métodos anteriores nos pueden proporcionar información útil sobre cuál
es el orden de integración de la variable que estamos analizando. No obstante,
en la mayoría de las ocasiones no son conclusiones. Incluso, pueden llevarnos
a tomar decisiones erróneas. Por ello, resulta aconsejable utilizar otro tipo de
métodos que nos indiquen de forma más fehaciente cuál es el verdadero orden
de integración de la variable que estamos analizando. Estos métodos están
basados en un contraste de hipótesis. Esto supone que es necesario tomar
una hipótesis nula, diseñar el estadístico de prueba y calcular su distribución
bajo la hipótesis nula y, con posterioridad, comparar el valor del estadístico
en nuestra muestra con los valores teóricos de la distribución.
El primer problema que se nos presenta es la elección de la hipótesis nula.
La familia de estadísticos que vamos a estudiar en este apartado considera
la hipótesis nula de raíz unitaria. Debemos recordar que si el polinomio
autorregresivo de retardos presenta una raíz unitaria, entonces el proceso no
es estacionario ya que al menos una raíz no está fuera del círculo unidad. Por
5
tanto, bajo la hipótesis nula, la variable es integrada. Entonces, si aceptamos
la hipótesis nula, podemos decir que la variable no es estacionaria. Sólo si
rechazamos esta hipótesis podemos admitir que existe evidencia en contra
de esta hipótesis y, por tanto, considerar que la variable es estacionaria. A
continuación vamos a analizar diversos estadísticos que estudian la hipótesis
nula de raíz unitaria.
3.1
Caso A. No autocorrelación
El estadístico más sencillo es el propuesto en Dickey y Fuller (1979). Supongamos que tenemos una variable que sigue un proceso AR(1). Este modelo
lo podemos expresar como sigue:
(1 ¡ ½ L) yt = ut )
yt = ½ yt¡1 + ut
(1)
De acuerdo a lo que vimos en apartados precedentes si ½ es igual a 1,
entonces el proceso no es estacionario, mientras que si j½j < 1 entonces la
variable es estacionario. El estudio de la hipótesis nula de estacionariedad
resulta complicado, por cuanto tan estacionaria es la serie cuando ½ = 0:5,
como cuando ½ = 0:9. POr tanto, no resulta sencillo determinar cuando
hay evidencia su…ciente para considerar que la variable es estacionaria. Por
contra, más sencillo resulta analizar cuando la variable no es estacionaria ya
que, eliminando los casos explosivos poco probables desde el punto de vista
económico, la variable no es estacionaria cuando ½ = 1. Esto supone que
bajo la hipótesis nula la variable es integrada, no estacionaria. El contraste
de esta hipótesis aparentemente es sencillo por cuanto es su…ciente estimar
el modelo (1) y, con posterioridad, obtener calcular el valor del t-ratio
¿=
^½ ¡ 1
¾^ ^½
No obstante, esto tiene una di…cultad y es que, dado que bajo la hipótesis
nula la variable no es estacionaria, no es cierto que el estadístico t converga
hacia una distribución normal. Al contrario, este estadístico converge hacia
la siguiente distribución:
¿=
R1
W (r) dW (r)
½^ ¡ 1
) 0s
¾
^ ^½
R1
W (r)2 dr
0
6
donde W(r) es un proceso de Wiener. La distribución anterior es actualmente bien conocida y esta tabulada en Fuller (1976) para algunos tamaños
muestrales. Con posterioridad, algunos autores han estimado funciones de
respuesta para obtener los valores críticos de esta distribución para cualquier
tipo de tamaño muestral (Ver Davidson or Cheung ).
La especi…cación del modelo () no recoge …elmente el comportamiento
de la mayoría de las variables macroeconómicas. Debemos recordar que la
mayoría de ellas presenta un componente tendencial o, al menos, se admite la
presencia de un término independiente en el modelo. En este tipo de casos, el
estudio de la hipótesis nula de raíz unitaria a partir del modelo () nos llevaría
a tomar decisiones de forma errónea. Un ejemplo de cómo pueden afectar
estos errores de especi…cación en los contrastes de raíz unitaria aparece en
Clemente et al. (1995), donde se demuestra que es posible la aparición de
raíces explosiva cuya naturaleza es meramente espúrea.
Para corregir este supuesto, podemos utilizar las especi…caciones alternativas propuestas en el trabajo original de Dickey y Fuller (1976). Estas son
las siguientes:
yt = ¹ + ½ yt¡1 + ut
yt = ¹ + ¯ t + ½ yt¡1 + ut
(2)
(3)
A partir de aquí podemos de…nir los estadísticos tm y tt. Ambos se
obtienen de la misma manera. El estadístico tm se de…ne como:
^½ ¡ 1
¾^ ^½
¿¹ =
donde ½^ y ¾^ ^½ se obtienen mediante la estimación del modelo (2). De forma
similar, tt se de…ne como:
^½ ¡ 1
¾
^ ½^
¿t =
pero en esta ocasión ½^ y ¾
^ ½^ son el resultado de estimar del modleo (3).
Al igual que ocurre con t, ninguno de estos dos estadísticos sigue una distribución con la que hayamos trabajado previamente. Por contra, ambos
estadísticos convergen hacia las siguientes distribuciones:
¿¹ )
R1
0
W ¤ (r) dW ¤ (r)
s
R1
0
7
W ¤(r)2 dr
¿¿ )
R1
0
~ (r) dW
~ (r)
W
s
R1
~ (r)2 dr
W
0
~ representan, respectivamente, la proyección de un proceso
donde W ¤ y W
de Wiener W sobre el espacio {1}y {1,t}. Esto quiere decir que son procesos de Wiener a los que se les ha eliminado el término independiete y, en
el segundo caso, la tendencia determinística. Estas dos distribuciones están
tabuladas en Fuller (1976). Davidson y Cheung también proporcionan super…cies de respuesta que permiten obtener los valores críticos para distintos
tamaños muestrales.
3.2
Caso B. Autocorrelación
Los estadísticos presentados en el apartado anterior son válidos siempre que
la variable presente exclusivamente un comportamiento AR(1). Sin embargo,
no siempre esto va a ocurrir. Es posible que las variables presenten esquemas de autocorrelación diferente. En ese caso, los estadísticos anteriores no
son válidos. Para comprender mejor los problemas a los que nos enfrentamos, consideremos quie la variable yt viene generada por un proceso AR(2).
Entonces, yt se de…ne de la siguiente manera:
(1 ¡ Á1 L ¡ Á2 L2) yt = vt )
yt = Á1 yt¡1 + Á2 yt¡2 + vt )
yt = ½ yt¡1 + ut
(4)
donde ut= Á2 yt¡2 +vt . La estimación del modelo anterior presentaría problemas de autocorrelación, por cuanto es fácil demostrar que E(ut ut-2)6= 0,
por lo que se incumple una hipótesis básicas del modelo. En consecuencia, no
es posible realizar inferencia. Además, los valores críticos tabulados en Fuller
(1976) son válidos sólo para el caso de no autocorrelación. En consecuencia,
es necesario llevar a cabo un procedimiento alternativo para poder contrastar
la hipótesis nula de raíz unitaria. Para ello, vamos a realizar una pequeña
transformación del modelo anterior de tal forma que queda de la siguiente
manera:
yt = Á1 yt¡1 + Á2 yt¡2 + vt
= Á1 yt¡1 + Á2 yt¡2 + Á2 ¢yt¡1 ¡ Á2¢yt¡1 + vt
8
yt
= (Á1 + Á2 ) yt¡1 + (¡Á2 ) ¢yt¡1 + vt )
= ½ yt¡1 + '1 ¢yt¡1 + vt
(5)
Entonces, la variable yt es integrada siempre que ½ = 1. Entonces, para
contrastar la hipótesis nula de raíz unitaria se puede calcular el estadístico
¿=
^½ ¡ 1
¾^ ^½
donde ^½ y ¾^ ½^ se obtienen a partir de la estimación mínimo cuadrático ordinaria del modelo (5) . Said y Dickey (1984) demuestran que la distribución
asíntótica de este estadístico coincide con la expresada en ().
Este resultado lo podemos extender al caso más general. Así, supongamos
que yt viene dado por la siguiente relación:
A (L) yt = B(L) et :
donde A(L) es un polinomio de retardos de orden p que puede presentar una
raíz unitaria. Además, también se cumple que A(1) = 0. Este polinomio
se puede representar también de esta forma A(L) = (1 ¡ L)A¤ (L) donde
A¤ (L) es un polinomio de orden p ¡ 1 que tiene todas sus raíces fuera del
círculo unidad. Por ejemplo, si consideramos que el polinomio A (L) es igual
a 1 ¡ 1:5L + 0:5L2 , lo podemos expresar como producto de dos polinomios
(1 ¡ L) £ (1 ¡ 0:5L), por lo que A¤ (L) sería en este caso (1 ¡ 0:5L).
Del mismo modo, B(L) es un polinomio de retardos de orden q cuyas
raíces están todas fuera del círculo unidad. De esta manera, excluimos el
caso de procesos no invertibles. Si dividimos a ambos lados de la igualdad
por B(L), el modelo anterior queda de la siguiente manera:
A (L)
yt = ª(L) yt = (1 ¡ L)ª¤(L) et :
B(L)
A(L)
donde ª(L) = B(L)
= (1 + Ã 1L + Ã 2L + ::::) es un polinomio de un
orden posiblemente in…nito. Será de orden …nito siempre y cuando B(L) =
1, en cuyo caso la variable no presenta componente de medias móviles. En
otro caso, al tener parte de medias móviles, el proceso lo podemos representar
mediante un AR(1), de ahí que el orden de ª(L) pueda ser in…nito. Además,
al contener una raíz unitaria, entonces se cumple que ª(1) = 0. Por lo tanto,
la suma de los in…nitos coe…cientes de este polinomio debe ser igual a la
unidad. Esto lo podemos utilizar para llevar a cabo el contraste, ya que
transformando el modelo anterior tenemos que:
9
ª(L) yt = (1 + Ã1 L + Ã 2L + ::::) yt = et )
yt =
1
X
à i yt¡i + et
i=1
= ½ yt¡1 + §pj=2 'j ¢yt¡j+1 + et
donde debemos tener en cuenta que
½=
1
X
Ãi
i=1
y
'i = ¡:
1
X
Ãj
j=i
El problema que se nos presenta ahora es el que los polinomios son de orden
in…nito por lo que este modelo no es aplicable en la práctica. No obstante, Said y Dickey demuestran que si elegimos un k su…cientemente grande,
entonces podemos estimar el siguiente modelo
yt = ½ yt¡1 + §1
j=2 'j ¢yt¡j+1 + et
Entonces, el contrate de la hipótesis nula de raíz unitaria es sencillo ya
que basta con estimar este modelo por mínimos cuadrados ordinarios para,
a continuación, calcular el estadístico t, de…nido como
Si, como es habitual, consideramos que la especi…cación anterior no es
su…ciente de cara a recoger los elementos determinístico de la variable yt,
entonces podemos considerar los modelos alternativos
yt = ¹ + ½ yt¡1 + §1
j=2 'j ¢yt¡j+1 + et
yt = ¹ + ¯ t + ½ yt¡1 + §1
j=2 'j ¢yt¡j+1 + et
4
Contrastes de Phillips-Perron
Una propuesta alternativa a los estadísticos de la familia Dickey-Fuller son los
propuestos en Phillips y Perron (1988). La intuición de estos estadísticos es
la siguiente. Supongamos que la variable es generada por el siguiente modelo:
yt = yt¡1 +ut , donde ahora ut no es un ruido blanco sino que cumple una serie
de supuestos que permiten la existencia de cierto grado de autocorrelación
10
y heteroscedasticidad (ver Phillips, 1987). Estas condiciones permiten que
la perturbación del modelo haya sido generada por los modelos ARIMA. En
estas circunstancias, si estimamos el modelo (), es sencillo demostrar que el
pseudo t-ratio converge hacia la siguiente distribución:
R1
¾u W (r) dW (r)
¿)
0
¾
s
R1
W (r)2 dr
0
T
P
siendo ¾2u = lim T ¡1
T !1
i=1
2Ã
!2 3
T
P
ei 5.
E (e2i ) mientras que ¾2 = lim T ¡1 E 4
T !1
i=1
Ese último elemento representa la varianza de largo plazo de la variable y
está íntimamente relacionado con la frecuencia espectral en 0.
Phillips y Perron (1988) propone corregir no paramérticamente el pseudo t-ratio para que el estadístico resultante converga hacia la distribución
tabulada en Fuller. Para ello proponen los siguientes estadísticos:
a) Para el caso del modelo (1)
Zt =
se
1
s2 ¡ s2e
s
¿ ¡
T
s
2
P
2
s T ¡2
yt¡1
i=1
b) para el caso del modelo (2)
Zt =
1
se
s2 ¡ s2e
¿ ¡ s
T
s
2
P
s T ¡2
(yt¡1 ¡ y¹t¡1 )2
i=1
donde y¹t¡1 = T ¡1
TP
¡1
i=1
yt
c) Para el caso del modelo (3)
Zt =
1 T 3 (s2 ¡ s2e )
se
p
¿ ¡
s
2 4 s DX 3
donde DX = Det(X 0 X), con X=f1; t; yt¡1 g. El estadístico s2e = T ¡1
siendo
T
P
i=1
2
T
P
i=1
e^2i ,
e^2i la suma residual de cada uno de los anteriores modelos. POr
último, s es un estimador consistente de ¾2 . Es este punto tenemos varias
alternativas. La primera, defendida por los propios autores en su trabajo
original, es usar el estimador de Newey-West
11
s2NW = T ¡1
T
X
e^2i + 2 T ¡1
i=1
X̀
j=1
! j`
T
X
e^t e^t¡j
i=j+1
j
. Sin embargo, existen otras posibilidades, como el
donde ! j` = 1 ¡ `+1
uso de las ventanas de Parzen o cuadrático espectral.
La elección del parámetro ` resulta muy importante depcara al uso de
estos estadísticos. Una primera posibilidad es usar el valor 4 T . Otra, más
adecuada, es usar métodos para determinar automáticamente este valor.
5
Orden de integración en variables estacionales
Hasta el momento hemos supuesto que las variables sometidas a estudio no
presentan componente estacional. En esos casos, los estadísticos presentados
en el apartado anterior serían los que deberíamos utilizar para determinar
el orden de integración de una variable. Sin embargo, no siempre esto va
a ser así. Es bastante frecuente que se dispongan de datos de frecuencia
inferior al año en el estudio aplicado. En estos casos debemos estudiar no
sólo el orden de integración de la parte regular, sino también el orden de
integración del componente estacional. El objetivo de este tema es presentar
los diferentes estadísticos que nos permiten estudiar el orden de integración
en presencia de estacionalidad. Vamos a considerar dos tipos de estadísticos.
El primero es una extensión de los contrastes de la familia de Dickey-Fuller
al caso estacional. El segundo responde a una …losofía diferente y analiza la
presencia de raíces unitarias para las diversas frecuencias.
A largo de los siguientes apartados vamos a considerar que la variable
analizada viene generada por (1-ls)yt = ut, donde s es el parámetro que nos
da la frecuencia con la que se obtienen los datos. Podemos considerar que
s=4, por lo que los datos son de tipo trimestral. La extensión a otros tipos
de frecuencias es inmediato.
5.1
Contraste de Hasza-Fuller
Este estadístico pertenece a la familia de estadísticos de Dickey-Fuller. Para
su obtención debemos estimar el siguiente modelo:
12
yt =
s
X
di Sit + ½s yt¡s + ut
(6)
i=1
donde Sit son unas variables dummies de tipo estacional. Entonces, el
estadístico de Hasza-Fuller se de…ne de forma análoga al resto de los estadísticos de esta familia:
¿ HF =
½^s ¡ 1
¾
^ ^½s
donde ^½s y ¾^ ^½s proceden de la estimación mínimo cuadrático ordinaria
de (6). Como es obvio este estadístico sigue distribución que depende de
procesos de Wiener, aunque en este caso son de tipo estacional.
La extensión a casos en los que se incluyen comportamientos determinísticos es inmediata. Así, podemos considerar los siguientes modelos alternativos:
5.2
yt = ½s yt¡s + ut
(7)
yt = ½s yt¡s + ut
(8)
Contraste HEGY
Los estadísticos anteriores tienen el grave problema que no son capaces de distinguir entre aquellas frecuencias que presentan un componente estacionaria
de las que no es estacionario. Para entender este punto, tomemos como caso
de estudio s=4. Entonces, se demuestra fácilmente que el poliómio (1-L4)
puede expresarse como sigue
1 ¡ L4 = (1 ¡ L) (1 + L) (1 + L2 )
lo que supone que el polinomio 1 ¡ L4 admite la presencia de 4 raíces
unitarias distintas. Es evidente que no todas ellas están relacionadas con la
frecuencia estacional. Así, el factor (1 ¡ L) está claramente vinculado a la
presencia de una raíz unitaria en la parte regular de la variable. El resto de
los polinomios sí están relacionados con raíces estacionales. (1 + L) implica
la presencia de una raíz unitaria en la frecuenciam bi-anual (dos ciclos por
año), mientras que (1 + L2) implica una raíz unitaria en la frecuencia anuak
(un sólo ciclo por año).
Este mismo esquema se puede extender a otro tipo de frecuencias. Por
ejemplo, en el caso mensual tenemos que:
13
1 ¡ L12 = (1 ¡ L) (1 + L) (1 ¡ iL)(1 + iL)
³
³p
´ 3
2
p ´ 3 2
i+ 3 L
3¡i L
5 41 +
5
£ 41 +
2
2
³
³p
´ 3
2
p ´ 3 2
i+ 3 L
3¡i L
5 41 ¡
5
£ 41 ¡
2
2
³
³p
´ 3
2
p ´ 3 2
i+ 3 L
3¡i L
5 41 ¡
5
£ 41 +
2
2
³
³p
´ 3
2
p ´ 3 2
i+ 3 L
3¡i L
5 41 +
5
£ 41 ¡
2
2
donde el polinomio original se trasnforma en producto de diversos polinomios.
Para comprobar la presencia de alguna o varias raíces unitarias en la
frecuencia estacional, el procedimiento a seguir es el siguiene. Tomemos
como caso de referencia el caso trimestral. Entonces, Hylleberg et al. (1990)
proponen llevar a cabo la estimación del siguiente modelo:
y4t =
4
X
¹i Sit + °t + ¼ 1y1;t¡1 + ¼2 y2;t¡1 + ¼3 y3;t¡2 + ¼ 4 y3;t¡1 + ²t ;
(9)
i=1
donde y1t = (1+L+L2 +L3 )yt ; y2t = (¡1+L¡L2 +L3)yt ; y3t = (¡1+L2 )yt y
y4t = ¢4 yt = yt ¡yt¡4 . La inclusión de una tendencia determinística depende
del tipo de variable, por lo que es opcional. NO ocurre lo mismo con la
inclusión de las variables dummies, a pesar de que en el trabajo originial de
HEGY estas no se incluyen. SIn embargo, estudios de MOnte Carlo de XXX
indican la convenencia de su inclusión. Una vez que hemos estimado este
modelo por MCO podemos realizar los siguientes contrastes
Ho
¼1 = 0
¼2 = 0
¼3 = 0
¼4 = 0
¼3 = ¼4 = 0
¼2 = ¼3 = ¼4 = 0
¼1 = ¼2 = ¼3 = ¼ 4 = 0
14
estadístico
t¼ 1 = ¾^¼^¼^1
1
t¼ 2 = ¾^¼^¼^2
2
t¼ 3 = ¾^¼^¼^3
3
t¼ 4 = ¾^¼^¼^4
4
F34 = t¼3 t¼4
6
Persistencia
Un concepto muy relacionado con el de raíz unitaria o con el de integración
es el de persistencia. Para comprender este concepto resulta conveniente retomar un paseo aleatorio. Como ha quedado demostrado con anterioridad,
este proceso se puede de…nir como suma de in…nitos shocks. Entonces el
efecto que un shock en el periodo i-ésimo tiene una duración in…nita. Por
contra, si el proceso generador de los datos es un modelo estacionario, el
efecto de un shock tiene una duración …nita, en su caso extremo, sólamente
un periodo. Si además tenemos en cuenta que los contrastes de raíz unitaria
tienen escasa potencia en muestras pequeñas, esto ha llevado a algunos autores a cuestionar los métodos utilizados con anteriodidad para determinar el
orden de integración de una variable. Por contra, sugieren utilizar diversos
estadísticos que nos den una medida de la in‡uencia que tiene un shock sobre
el comportamiento de una variable. Cuanto mayor es el valor de este estadístico, mayor es la persistencia del shock y, por tanto, más cerca estamos
de considerar que la variable es integrada. Al contrario, si los estadísticos
toman un valor próximo a 0, entonces el shock tiene una in‡uencia limitada
y, en consecuencia, la hipótesis de estacionariedad de la variable parece más
verosímil.
Una medida del grado de persistencia de la variable es la proporcionada
por Cochrane (1986). Este estadístico, denominado el ratio varianza (VR),
se de…ne como sigue:
V Rk =
Vk
=
V1
V ar(yt ¡yt¡k )
k
V ar(yt ¡yt¡1 )
1
=
V ar (yt ¡ yt¡k )
k V ar (yt ¡ yt¡1 )
Se puede demostrar que este estadístico es igual a:
V Rk = 1 + 2
k µ
X
i=1
¶
i
1¡
ri
k+1
donde ri es el coe…ciente i-estimo de la función de autocorrelación de la
variable ¢yt . Dado que los componentes del estadístico son momentos poblacionales, no son conocidos, por lo que es necesario su estimación. Cochrane
(1986) propone la siguiente estimación:
^
V Rk =
s2k
T
2
k s1 T ¡ k + 1
donde s2i es la varianza muestral de la variable yt ¡ yt¡i . El segundo
elemento de la expresión anterior es un factor de corrector para muestras
15
^
…nitas. Se demuestra que cuando T; k ! 1 y k=T ! 1 , entonces V Rk
V R2
converge hacia una distribución normal de media V Rk y varianza 4k ¢3 Tk .
En la práctica es habitual calcular el estadístico anterior para diversos
valores de k, con un k que debe ser elevado. El problema es que cuando
disponemos de pocas observaciones, no es posible tomar un k elevado. Por
tanto, tenemos problemas parecidos a los que aparecen cuando realizamos el
contraste de raíz unitaria.
Otra medida de persistencia que es usada en trabajos empíricos es la
vida media de un shock (HL). Este estadístico mide la duración de un shock
a partir de la siguiente formula:
HL =
ln 0:5
ln ^½
donde ^½ es el estimador del coe…ciente de correlación entre yt e yt¡1 .
Cuanto mayor es el valor de esta medida, mayor es el grado de persistencia
y, en consecuencia, más cerca estamos de considerar que esta variable no es
estacionaria.
16
 0
0
Anuncio
Documentos relacionados



Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados