CAPÍTULO VII ELASTICIDAD EN DOS DIMENSIONES
Anuncio

CAPÍTULO V
1
CAPÍTULO V
ÍNDICE
5.1
Introducción
V-1
5.2
Problemas tridimensionales que pueden ser resueltos como planos
V-1
5.3
Planteamiento de Filón para la tensión plana
V-3
5.4
Ecuaciones de la elasticidad en coordenadas cartesianas para
problemas de deformación plana y de tensión plana
V-5
5.5
Función de Airy
V-10
5.6
Representación gráfica del estado de tensiones de un punto.
Circunferencia de Mohr
V-13
Curvas representativas del estado plano
V-21
5.7
5.7.1 Isostáticas
V-21
5.7.2 Isoclinas
V-22
5.7.3 Isocromáticas
V-23
5.8
V-32
Estado plano termoelástico
CAPÍTULO V
2
CAPÍTULO V
ELASTICIDAD EN DOS DIMENSIONES
5-1.
Introducción.
En capítulos anteriores se ha presentado la teoría de la Elasticidad analizando el estado
de tensiones y de deformaciones de un punto de un sólido elástico de la forma más
general posible, es decir tridimensionalmente. Sin embargo existen multitud de
problemas en ingeniería que pueden ser simplificados y estudiados como si fuesen
planos. Hay que destacar que los problemas planos no existen en la realidad sino que es
una entelequia o artilugio que se emplea para resolver un problema tridimensional de
manera más sencilla.
En general existen dos tipos de problemas tridimensionales que pueden ser resueltos
como si fuesen planos: Problemas de Deformación Plana y Problemas de Tensión Plana,
y cada uno de ellos tiene sus implicaciones en cuanto a geometría y carga se refiere.
En este capítulo se analizará en primer lugar las condiciones que tiene que cumplir un
sólido, en cuanto a geometría y carga, para ser tratado como problema plano. Luego se
analiza completamente el Problema bidimensional restringiendo el estudio al caso de
coordenadas cartesianas.
5-2.
Problemas tridimensionales que pueden ser resueltos como planos.
En general existen dos tipos de problemas cuya geometría y carga permiten que puedan
ser tratados como planos: Problemas de Deformación Plana y de Tensión Plana.
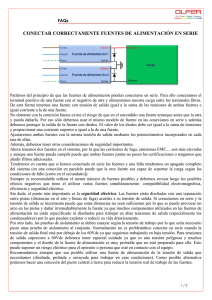
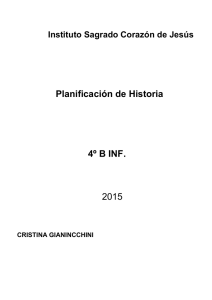
Problemas de Deformación Plana
Sea un sólido de longitud infinita en dirección X3 y de tal forma que la carga es
perpendicular a dicho eje y constante a lo largo de él ( la carga en el plano X1 – X2
puede ser cualquiera, la única condición que se exige es que se mantenga a lo largo del
eje X3) tal y como trata de mostrar la figura 5-1.
X2
X3
X1
Figura 5-1
CAPÍTULO V
3
En estas circunstancias, y debido a lo infinito de la longitud, cualquier plano
perpendicular al eje X3 es de simetría. Las implicaciones que se deducen para los puntos
situados en dicho plano son que:
No tienen desplazamiento en dirección X3.
Los desplazamientos según los ejes X1 e X2 no dependen de la posición del
plano de simetría, sino de las coordenadas del punto en el plano
Consecuencia
u1 = u1 ( x1, x2 )
u2 = u2 ( x1, x2 )
u3 = 0
5-1
Por tanto para este tipo de cuerpos el tensor de deformaciones queda:
ε11 ε12
ε ij = ε 21 ε 22
0
0
∂u1
0
∂x1
0 ≡
∂u
1 ∂u
0 1 + 2
2 ∂x2 ∂x1
1 ∂u1 ∂u2
+
2 ∂x2 ∂x1
∂u2
∂x2
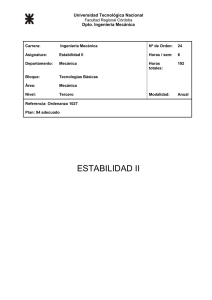
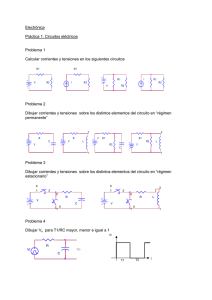
Problemas de Tensión Plana:
Sea un sólido tal que una de sus tres dimensiones es bastante menor que las otras dos, y
además las cargas están aplicadas sobre la cara cuya dimensión es menor y simétricas
respecto a la línea media del espesor, tal y como muestra la figura 5-2:
X3
X2
X1
e↓↓
P1
X
P1
Línea media
P1
P1
Figura 5-2
En este tipo de problemas la simplificación que se realiza consiste en suponer nulas las
tensiones según el eje X3, es decir:
σ 31 = σ 32 = σ 33 = 0
Quedando el tensor de tensiones de la siguiente forma:
5-2
CAPÍTULO V
4
σ 12
σ
σ ij = 11
σ 12 σ 22
Este caso presenta una diferencia fundamental con el anterior y es la siguiente:
En un problema de Deformación Plana la hipótesis de anulación de los términos ε 3 i es
rigurosa y matemáticamente correcta, en el presente caso la hipótesis de anulación de la
tensiones σ 3 i es eurística (de hecho en un problema real de tensión plana σ 3 i ≠ 0 ).
Por tanto es necesario una demostración sobre lo acertado o alejado que está de la
realidad la aseveración de la expresión 5-2, asunto que se trata en el siguiente apartado
5-3.
Planteamiento de Filón para la Tensión Plana.
Filón propuso, en 1903, un planteamiento para justificar la simplificación de la
expresión 5-2 (o lo que es lo mismo para justificar la tensión plana), cuya idea
fundamental es trabajar con los valores medios de las tensiones y deformaciones en vez
de su valor real.
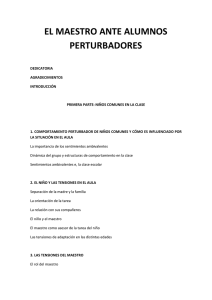
A tal fin se hace uso de la figura 5-3 en la que presenta a un sólido y dos puntos, A y B,
simétricamente situados respecto al eje X1. Si uno de los puntos tiene coordenadas
A(x1,x2,x3), entonces el simétrico será el punto B(x1,x2,-x3). Puesto que la carga debe ser
simétrica respecto al eje X1 los desplazamientos cumplirán:
u1( x1, x2 , x3 ) = u1(x1, x2 , x3 )
u2 (x1, x2 , x3 ) = u2 ( x1, x2 , x3 )
5-3
u3 ( x1, x2 , x3 ) = −u3 ( x1, x2 , x3 )
X2
2a
A
•
•
X1
X3
B
Figura 5-3
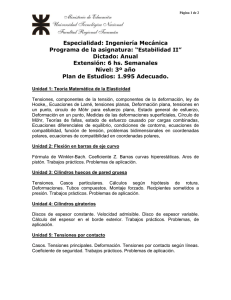
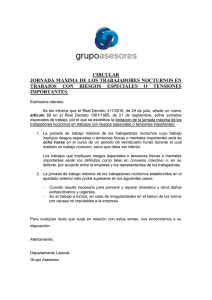
A continuación se analiza lo que ocurre con las tensiones en ambos puntos. Para ello se
amplía la figura 5-3 resultando la figura 5-4:
CAPÍTULO V
5
X2
a
a
σ31
X3
σ33
σ32
σ32
X1
σ33
σ31
Figura 5-4
Si se hace una representación en planta de la figura 5-4 se obtiene la figura 5-5 y en ella,
y aras de la claridad del dibujo, se dibuja únicamente σ31
σ31
σ31
B
σ31
Caras vistas
A
σ31
Figura 5-5
Y como puede observarse las caras vistas tienen tensiones iguales pero de sentido
contrario. Por tanto se puede afirmar que:
σ 31(x1, x2 , x3 ) = −σ 31( x1, x2 ,− x3 )
5-4
Siguiendo igual razonamiento para el resto de las tensiones (no es mas que aplicar lo
visto en el capítulo anterior para el caso de cuerpos simétricos) se obtiene:
σ 32 (x1, x2 , x3 ) = −σ 32 (x1, x2 ,− x3 )
σ 33 ( x1, x2 , x3 ) = σ 33 (x1, x2 ,− x3 )
5-5
Si se halla el valor medio de estas tensiones en el eje X3 resulta:
1
2a
x3 = a
1
∫ σ 31( x1, x2 , x3 )dx3 = 2a
x3 = − a
x3 = a
∫ σ 32 ( x1, x2 , x3 )dx3 = 0
x3 = − a
5-6
CAPÍTULO V
6
Sin embargo el valor medio de las tensiones normales no es nulo:
1
2a
x3 = a
∫ σ 33 ( x1, x2 , x3 )dx3 ≠ 0
5-7
x3 = − a
La aplicación de la condición de contorno para la cara x3 = a y para la cara x3 = - a da
como resultado:
σ 31 = 0 ; σ 32 = 0 ; σ 33 = 0
5-8
Por otra parte la tercera ecuación de equilibrio, despreciando las fuerzas de volumen,
establece que:
∂σ 31 ∂σ 32 ∂σ 33
+
+
=0
∂x1
∂x2
∂x3
Si se aplica para un punto del contorno resultará:
∂σ 33
=0
∂x3
5-9
ya que tanto σ 31 ; σ 32 como σ 33 son nulas en el contorno.
Las conclusiones hasta ahora obtenidas dicen:
a) Los valores medios a lo largo del espesor de las tensiones tangenciales σ13 σ23
son nulos.
b) El valor medio de tensión normal σ33 no es nulo en el interior del cuerpo, sin
embargo si es nulo en los extremos así como la derivada.
Esta última conclusión permite afirmar que si la dimensión del cuerpo en dirección X3
es pequeña el valor medio de σ33 a lo largo de esa dirección es una cantidad
despreciable.
Por tanto trabajando con valores medios, el tensor de tensiones será:
*
*
*
*
σ 11
σ 12
σ 12
0 σ 11
*
*
*
*
σ 22
σ ij = σ 21
σ 22
0 ≈ σ 21
*
0
0
0
0 σ 33
Ecuación en la que el asterisco significa valor medio
0
*
σ * σ 12
0 = 11
*
*
σ 21
σ 22
0
5-10
CAPÍTULO V
7
5.4
Ecuaciones de la Elasticidad en Coordenadas Cartesianas para Problemas
de Deformación Plana y de Tensión Plana.
Se vio anteriormente que en un problema de Deformación Plana el tensor de
deformaciones era:
ε
ε
ε ij = 11 12 y ε13 = ε23 = ε33 = 0
ε 21 ε 22
Por tanto aplicando la ley de Hooke, se obtiene
1
[σ11 − v (σ 22 + σ 33 ) ]
E
1
ε 22 = [σ 22 − v (σ 11 + σ 33 ) ]
E
1
ε 33 = [σ 33 − v (σ 22 + σ 11 ) ] = 0
E
ε11 =
ε12 =
σ 12
5-11
σ
σ
; ε13 = 13 = 0 ; ε 23 = 23 = 0
2G
2G
2G
despejando σ33 de la tercera ecuación de 5-11 se obtiene:
σ 33 = v (σ 22 + σ 11 )
y sustituyendo este valor en la primera y segunda de 5-11:
[(
[(
]
]
)
)
1
1 − v 2 σ 11 − v ( 1 + v )σ 22
E
1
ε 22 =
1 − v 2 σ 22 − v ( 1 + v )σ 11
E
ε11 =
que en unión de:
ε12 =
5-12
σ12
2G
Constituyen la ley de Hooke para problemas de Deformación Plana.
Supóngase ahora que se desea escribir las ecuaciones 5-12 (ley de Hooke
bidimensional) de igual forma que la tridimensional, es decir:
ε ij =
(
1+ v
σ ij − v σ kk δ ij
E
)
5-13
Para ello será necesario definir unos coeficientes elásticos ficticios de valor:
Eˆ =
E
1− v
2
vˆ =
v
1− v
5-14
CAPÍTULO V
8
para que las ecuaciones 5-12 queden escritas de igual forma que las 5-13, es decir:
ε ij =
(
1 + vˆ
σ ij − vˆ σ kk δ ij
Eˆ
)
i, j = 1,2
5-15
Que es la forma en que se suele presentar la ley de Hooke bidimensional en
deformación plana. Es necesario recalcar que los coeficientes Eˆ y vˆ no son el
Módulo de Elasticidad y de Poisson sino coeficientes definidos por conveniencia.
En el caso de Problemas de Tensión Plana se cumple que:
*
*
σ 11
σ12
*
*
*
σ 13
= σ 23
= σ 33
=0
σ ij = *
*
σ
21 σ 22
Planteando las ecuaciones de Lamé:
(
)
*
*
*
*
*
)
σ 22
= 2 G ε 22
+ λ (ε11
+ ε 22
+ ε 33
*
*
*
*
*
)= 0
σ 33
= 2 G ε 33
+ λ (ε11
+ ε 22
+ ε 33
*
*
*
*
*
σ11
= 2 G ε11
+ λ ε11
+ ε 22
+ ε 33
*
*
σ12
= 2 ⋅ G ⋅ ε12
5-16
*
*
*
σ 13
= σ 23
= σ 33
=0
*
de la tercera ecuación de 5-16 :
Despejando ε 33
*
ε 33
=−
*
*
(
)
ε11
+ ε 22
λ + 2⋅G
λ
y sustituyendo este valor en la primera y segunda de 5-16 se obtiene:
(
)
2λ G
*
*
*
*
(
)
ε11
σ 11
= 2 ⋅ G ⋅ ε11
+
+ ε 22
λ + 2G
*
*
= 2 ⋅ G ⋅ ε11
+
σ 11
2λ G
*
*
ε11
+ ε 22
λ + 2G
5-17
*
*
σ 12
= 2 G ε12
Que es la expresión de la Ley de Hooke para problemas bidimensionales de Tensión
Plana.
Supóngase que, al igual que en el caso anterior, se desea escribir las ecuaciones 5-17 de
igual forma que las tridimensionales, es decir:
σ ij = 2 G ε ij + λ ε kk δ ij
i, j = 1,3
5-18
CAPÍTULO V
9
será necesario cambiar los coeficientes elásticos a otros tales como:
(
G=G
(
λ=
2λ G
λ + 2G
5-19
logrando, de esta forma, que las ecuaciones de Lamé bidimensionales se escriban igual
que las tridimensionales:
*
σ ij* = 2 G ε ij* + λ ε kk
δ ij
i, j = 1,2
5-20
Conclusión:
Siempre es posible escribir las ecuaciones bidimensionales de igual forma que las
tridimensionales sin mas que cambiar el valor de los coeficientes elásticos por otros
ficticios. Esta estrategia tiene un fin claro (como puede deducirse fácilmente del
desarrollo realizado) y es que las ecuaciones de la Elasticidad bidimensional sean
escritas de la misma forma que las de la Elasticidad tridimensional. A modo de resumen
se escriben a continuación las ecuaciones obtenidas hasta el momento de la Elasticidad
particularizadas para el caso bidimensional.
DEFORMACIÓN PLANA
TENSIÓN PLANA
Ecuaciones de Navier
(
)
(
Gˆ ui, jj + λˆ + Gˆ u j ,ij + (FV )i = 0
G = Ĝ λˆ = λ
----------------------------------------
(
)
1 + vˆ
σ ij − vˆ σ kk δ ij
Eˆ
E
v
Eˆ =
vˆ =
1− v
1 − v2
----------------------------------------
ε ij =
-----------Ley de Hooke:
)
(
( (
G ui, jj + λ + G u j ,ij + (FV )i = 0
(
(
2λ G
G=G
λ=
λ + 2G
-------------------------------------
ε ij* =
(
(
1+ v * ( *
( σ ij − v σ kk δ ij
E
(
(
E=E
v =v
)
------------ ------------------------------------Ecuaciones de Lamé:
(
( *
σ ij = 2 Gˆ ε ij + λˆ ε kk δ ij
σ ij* = 2 G ε ij* + λ ε kk
δ ij i, j = 1,2
(
(
2λ G
Gˆ = G
λˆ = λ
G=G
λ=
λ + 2G
--------------------------------------------------- ------------------------------------Aunque, para el caso de Tensión Plana, se han escrito las ecuaciones con el asterisco,
significando con ello que son valores medios a lo largo del espesor de la pieza, pueden
perfectamente ser escritas sin el asterisco y sobreentenderse que son valores medios a lo
largo del espesor. De acuerdo con ello la única diferencia entre Tensión Plana y
Deformación Plana estribaría en el valor de las constantes elásticas.
CAPÍTULO V
10
Por último, las 6 ecuaciones de compatibilidad tridimensionales se reducen a una
exclusivamente en el caso plano:
∂ 2ε 11 ∂ 2ε 22
∂ 2ε 12
+
−
=0
2
∂x1∂x2
∂x22
∂x12
∂ 2ε 23
∂ 2ε 22 ∂ 2ε 33
+
−
=0
2
∂x2 ∂x3
∂x32
∂x22
∂ 2ε 33 ∂ 2ε 11
∂ 2ε 13
+
−2
=0
∂x1∂x3
∂x12
∂x32
−
∂ 2ε 11
∂ ∂ε 23 ∂ε 13 ∂ε 12
−
=0
+
+
+
∂x2 ∂x3 ∂x1 ∂x1
∂x 2 ∂x3
−
∂ 2ε 22
∂ ∂ε 13 ∂ε 12 ∂ε 23
−
=0
+
+
+
∂x1∂x3 ∂x 2 ∂x2 ∂x3
∂x1
------Æ
∂ 2ε11
∂x22
+
∂ 2ε 22
∂x12
−2
∂ 2ε12
=0
∂x1∂x2
∂ 2ε 33
∂ ∂ε 12 ∂ε 23 ∂ε 13
−
=0
−
+
+
+
∂x1∂x2 ∂x3 ∂x3
∂x1
∂x2
5-5.
Función de Airy.
En coordenadas cartesianas y para el caso bidimensional, tanto en tensión Plana como
en Deformación Plana, existen diversas funciones potenciales que resuelven el
Problema Elástico. Una de las más sencillas, y que a continuación se presenta, es la
conocida Función de Airy que emplea soluciones polinómicas y exige que las Fuerzas
por Unidad de Volumen son constantes o nulas.
A tal fin supóngase la existencia de una cierta función Φ tal que cumpla:
σ 11 =
∂ 2Φ
∂ x22
σ 22 =
∂ 2Φ
∂ x11
∂2 Φ
σ 12 = −
− (FV )1 ⋅ x2 − (FV )2 x1
∂ x1 ∂ x2
5-21
Las condiciones que debe cumplir la función Φ así definida para que sea solución de un
problema elástico son:
a) Que cumpla las ecuaciones de equilibrio
b) Que cumpla las ecuaciones de compatibilidad en tensiones (ya que la función se
define en tensiones).
-
Condición ( a )
∂ σ 11 ∂ σ 12
+
+ (FV )1 = 0 ⇒
∂ x1
∂ x2
∂3 Φ
∂ x1 ∂ x22
−
∂3 Φ
∂ x1 ∂ x22
− (FV )1 + (FV )1 = 0 ⇒ cumple
CAPÍTULO V
∂3 Φ
∂ σ 12 ∂ σ 22
+
+ (FV )2 = 0 ⇒
∂ x1
∂ x2
-
∂ x2 ∂ x12
−
∂3 Φ
∂ x2 ∂ x12
11
− (FV )2 + (FV )2 = 0 ⇒ cumple
Condición ( b )
∂2 Φ ∂2 Φ
∂(FV )1 ∂ (FV )2
=0
= 0 ⇒ ∇ 2
∇ 2 (σ 11 + σ 22 ) − ( 1 + v )
+
+
2
2
∂
∂
x
x
∂ x2
1
2
∂ x1
Lo que significa que la función Φ es biarmónica, es decir:
∇ 4Φ = 0
5-22
Por tanto cualquier función que se defina como 5-21 y además sea biarmónica será
solución de un problema elástico.
La forma más sencilla de la función Φ es un polinomio homogéneo de grado superior o
igual a dos. Con esta elección es relativamente sencillo resolver problemas en los que
las condiciones de contorno varíen de forma uniforme, lineal, parabólica, etc. Así:
Problemas como los que muestra la figura siguiente:
σ = constante
τ = constante
Figura 5-6
son resueltos por una función de Airy del tipo:
Φ = A x12 + B x1x2 + C x22
-
Si el vector tensión varia linealmente en el contorno:
CAPÍTULO V
12
Figura 5-7
Una función de Airy es del tipo:
Φ = A x13 + B x12 x2 + C x1x22 + Dx23 + Ex12 + Fx1x2 + Gx22
lo resuelve adecuadamente
-
Si la variación es parabólica:
Figura 5-8
Una función de Airy del tipo:
Φ = A x14 + B x13 x2 + C x12 x22 + Dx1 x23 + Ex24 + F x13 + G x12 x2 + H x1x22 +
Ix23 + Jx12 + Kx1x2 + Lx22
Lo resuelve, debiéndose cumplir además que sea biarmónica, es decir:
∇4Φ = 0
y así sucesivamente.
Por último es necesario hacer unas consideraciones sobre las tensiones tangenciales
máximas:
CAPÍTULO V
13
En un estado plano ( en deformación y tensión plana respectivamente) el tensor
de tensiones es de la siguiente forma:
σ
11 σ 12
σ ij = σ 21 σ 22
0
0
0
0
0
σ * σ *
0
12
11
*
*
σ ij = σ 21 σ 22 0
*
0
0 σ 33
Y los círculos de Mohr correspondientes a ambos tensores serán (supuestas positivas las
tensiones principales):
D
(Tτ )3max
D
(Tτ )2max
σIII
σII
D
(Tτ )3max
σI
σIII
σII
D
(Tτ )2max
σI
Figura 5-9
Por tanto las tensiones tangenciales máximas, visto el punto elástico en su forma
tridimensional, no coinciden con las del estado plano (cuyos valores son menores).
5-6. Representación Gráfica del Estado de Tensiones de un Punto.
Círcunferencia de Mohr.
Al igual que en el caso tridimensional se realizó una representación gráfica de las
tensiones y/o deformaciones intrínsecas a través de lo que se denominó círculos de
Mohr. En el caso plano se hace la correspondiente representación de las componentes
intrínsecas del vector tensión que se denomina Circunferencia de Mohr.
A tal fin considérese un vector n normal a un plano y el vector n´ contenido en el
mismo plano. Los cosenos directores son:
n = (cosα , senα )
n´ = (senα ,− cosα )
Si el tensor de tensiones viene dado en ejes principales las componentes intrínsecas del
vector tensión tienen por expresión:
CAPÍTULO V
14
n
II
Tσ
Plano
T
α
I
Tτ
n´
Figura 5-10
σ
Tσ = (cos α , senα ) I
0
0 cos α
2
2
= σ I cos α + σ II sen α =
σ II senα
σI
σ II
2
2
cos α +
σI
2
2
cos α +
2
2
sen α +
σ II
2
5-23
2
sen α
σ
σ
Sumando y restando: ± I sen 2α y ± II cos 2 α , es fácil llegar a:
2
2
σ I + σ II σ I − σ II
Tσ =
+
cos 2α
2
2
Por otra parte:
σ
Tτ = (senα ,− cos α ) I
0
σ I − σ II
sen2α
2
5-24
0 cos α
= σ I cos αsenα − σ II senα cos α =
σ II senα
5-25
Entre 5-24 y 5-25 puede eliminarse el ángulo α y obtener un lugar geométrico de los
vectores tensión asociados a un determinado tensor de tensiones:
Para ello se pasa al primer miembro el término:
σ I + σ II
de 5-24 y se eleva al
2
cuadrado; luego se eleva al cuadrado 5-25. A continuación se suman y se obtiene:
2
2
σ + σ II
σ − σ II
2 σ − σ II
cos 2α + I
sen2α
Tσ − I
+ Tτ = I
2
2
2
2
o bien:
2
σ + σ II
2 σ − σ II
Tσ − I
+ Tτ = I
2
2
2
5-26
CAPÍTULO V
15
La ecuación anterior corresponde a una circunferencia en ejes (Tσ, Tτ) cuyo centro está
σ I + σ II
sobre el eje Tσ y situado a una distancia del origen:
, siendo el radio:
2
σ I − σ II
(ver figura siguiente). Tal circunferencia es conocida como circunferencia de
2
Mohr, y en general: Dado un tensor de tensiones la circunferencia de Mohr es el lugar
geométrico de los infinitos estados tensionales (Tσ, Tτ) correspondientes a los infinitos
planos que pasan por un punto.
Tτ
σ I + σ II
2
(Tτ )max
σII
Tσ
σI
Figura 5-11
Es interesante notar ciertos aspectos de la circunferencia de Mohr:
-
Considerése un punto P cualquiera de la circunferencia. La proyección del punto P
sobre el eje Tσ (ver figura siguiente) es el punto A, y el centro de la circunferencia
es el punto M. Se cumple que:
α
P
O
β
σ II
M
σI
A
Figura 5-12
OA = Tσ = OM + MA =
σ I + σ II
2
PA = Tτ = PM senβ =
σ − σ II
+ I
cos β
2
σ I − σ II
2
senβ
5-27
5-28
CAPÍTULO V
16
Si se compara 5-24 con 5-27 puede observarse que para que sean idénticas es necesario
que se cumpla que β = 2α, igual conclusión se extrae si se compara 5-25 con 5-28.
Por tanto un punto cualquiera de la circunferencia de Mohr representa al estado
tensional de un plano de corte cuya normal forma un ángulo α con la dirección
principal I o bien un ángulo β = 2α con la dirección principal I (lo usual es emplear el
ángulo β ) .
Lo anterior visto no es en absoluto artificioso pues pueden seguirse los mismos pasos
que en el caso tridimensional. Efectivamente supóngase que se desea hallar (Tσ, Tτ )
dada una dirección determinada n1 = (cos γ , senγ ) . Para ello se levanta una
perpendicular al eje Tσ por el punto σI . Se traza un arco cuyo ángulo sea arccos γ hasta
que corte a la circunferencia de Mohr. De esta forma se obtendría el punto P de la figura
anterior. Las coordenadas del punto P es el estado tensional correspondiente
Cuando el tensor de tensiones no viene dado en ejes principales es necesario hallar las
tensiones principales. Para ello se sigue el procedimiento habitual consistente en restar
un parámetro λ a la diagonal principal e igualar a cero el determinante, obteniendo:
(
)
σ 11 − λ
σ 12
2
= 0 ⇒ λ2 − (σ 11 + σ 22 )λ + σ 11σ 22 − σ 12
=0
σ 12
σ 22 − λ
cuyas raíces son:
σI =
σI =
σ 11 + σ 22
2
σ 11 + σ 22
2
2
σ − σ 22
2
+ 11
+ σ 12
2
2
5-29
σ − σ 22
2
− 11
+ σ 12
2
Las direcciones principales (en este caso es suficiente con obtener una pues la otra es
perpendicular) se hallan sustituyendo λ por σI (por ejemplo), multiplicando la matriz
por la dirección incógnita e igualando a cero es decir:
σ 12 l
σ 11 − σ I
= 0 ⇒ (σ 11 − σ I ) l +σ 12 m = 0 ⇒
σ 22 − σ I m
σ 12
m
σ −σI
= tag α = − 11
l
σ 12
Estas conclusiones se representan gráficamente en la figura siguiente:
5-30
CAPÍTULO V
σ22
17
σI
σII
α
σ11 =>
σ12
Figura 5-13
A continuación se comentan particularidades sobre la construcción y aplicaciones de la
circunferencia de Mohr.
a)
Dado el estado tensional de un punto elástico es posible hallar las tensiones y
direcciones principales de forma gráfica:
σ22
A
1
2
σ11
4
=>
σII
σ11
M
3
σ12
β
σ22
σI
B°
Figura 5-14
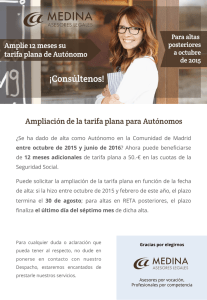
Para ello se parte de un estado tensional que puede venir dado de forma gráfica (figura
5-14-a), o bien de forma analítica o sea el tensor de tensiones (supóngase que σ22 > σ11 )
En primer lugar se sitúa a escala el valor de σ22 sobre el eje Tσ por dicho punto se
levanta la cantidad correspondiente a σ12 obteniendo el punto A. Luego se mide σ11 a
igual escala y se sitúa σ12 hacia el lado negativo del eje Tτ obteniendo el punto B.
Puesto que ambos puntos, A y B, son representativos de los estados tensionales
correspondientes a los planos 1-2 y 2-3:
Punto B (plano 2-3)
n = ( 1, 0 ) n´ = ( 0 ,±1 )
Tσ = σ ij n j ni = σ 11
{ }
Tτ = {σ ij n j }n´i = σ 12
Punto A (plano 1-2):
n = ( 0 ,1 ) n´ = ( ± 1, 0 )
Tσ = σ ij n j ni = σ 22
{ }
Tτ = {σ ij n j }n´i = σ 12
deben estar situados sobre la circunferencia de Mohr. Además las normales de ambos
planos forman 90º por lo que al ser trasladarlas al circulo de Mohr deben formar 180º.
Ello significa que si se unen los puntos A y B por una recta, esa debe ser una diagonal
CAPÍTULO V
18
de la circunferencia de Mohr. Puesto que el centro de la circunferencia debe estar sobre
el eje σ, concluimos que: el punto de corte de la recta que une A y B con el eje σ es el
centro de la circunferencia de Mohr ( punto M de la figura superior) y el radio debe ser
la distancia MA o MB.
Queda una cuestión pendiente por dilucidar, y es por qué se mide σ12 hacia el lado
positivo del eje Tσ para obtener el punto A y sin embargo se mide σ12 hacia el lado
negativo del eje Tσ para obtener el punto B.
La respuesta se basa recordando que en el capítulo I se estableció por convenio que las
tensiones tangenciales eran positivas cuando seguían la dirección positiva de los ejes en
las caras vistas. Esta forma de representación obliga a adoptar otro convenio para situar
las tensiones tangenciales en la circunferencia de Mohr tal como el siguiente: Se miden
sobre el eje positivo de Tτ aquellas tensiones tangenciales que dejen el sólido a
derechas, consecuentemente se medirán negativamente aquellas tensiones tangenciales
que dejen el sólido a izquierda. Es necesario recalcar que en la representación de Mohr
el hecho de que las tensiones tangenciales sean positivas o negativas sólo significa que
al dibujarlas sobre un punto elástico dejan el sólido a derechas o a izquierdas.
Se mide como positiva en la circunferencia de
Mohr porque deja el sólido a la derecha
Se mide como negativa en la
circunferencia de Mohr porque deja el
sólido a la izquierda
Figura 5-15
Una vez dibujado la circunferencia de Mohr, figura 5-16, los valores extremos sobre el
eje σ son precisamente las tensiones principales σI y σII. El ángulo β que forma con el
eje σ es el doble del que forma con la dirección principal I, de acuerdo con la siguiente
figura:
CAPÍTULO V
19
σ22
A
1
2
σ11
σII
=>
σ11
M
3
4
β
σ22
σI
α = β/2
σ12
B°
σI
σII
Figura 5-16
En definitiva el estado tensional correspondiente al plano 1-2 es el punto A de la
circunferencia de Mohr y el punto B el correspondiente al plano 2-3. Por tanto
situándonos sobre el punto A y girando en el sentido de las agujas del reloj un ángulo β
se llega al punto representativo del plano de actuación de σI . O lo que es lo mismo el
ángulo que forma la normal al plano 1-2 con la normal al plano principal es α =
β
2
b)
Utilizando la circunferencia de Mohr es sencillo hallar la tensión tangencial
máxima de un estado plano. Para ello se hace uso de la figura siguiente:
( Tτ )max
σ22
D
A
1
2
σ11
4
σII
=>
σ11
M
3
σ12
β
σ22
σI
B°
Figura 5-17
Y es inmediato observar que el punto D corresponde al punto de tensión tangencial
máxima cuyo valor es:
(Tτ )max = σ I − σ II
2
y el plano donde se produce es tal que forma 45º con la dirección principal I.
.
CAPÍTULO V
20
c) Existen dos casos particulares que son interesantes de estudiar. Uno corresponde a
la situación que se produce cuando σ I = −σ II , que se presenta a continuación:
Tτ
( Tτ )max
σ II
σI
M
Tσ
Figura 5-18
En este caso el plano donde se produce la máxima tensión tangencial es tal que no se
producen tensiones normales, o lo que es lo mismo el punto elástico está sometido a un
estado de cortadura pura. La figura siguiente lo aclara de forma gráfica:
σII
Tτ
( Tτ) max
2
1
σI
3
σII
M
σI
2
1
( Tτ) max
3
Figura 5-19
d ) Otro caso interesante es cuando σI = σII entonces la circunferencia de Mohr se
reduce a un punto y cualquier dirección es principal.
CAPÍTULO V
21
σI = σII
•
Figura 5-20
5-7.
Curvas Representativas del estado plano.
En este apartado se van a estudiar curvas, mejor familias de curvas, que ayudan a
adquirir una visión global del comportamiento de la pieza en su conjunto, y estudiar
alguna propiedad que pueda tener el estado tensional que ayude en el diseño de la pieza.
Una de las familias más importantes son las Isostáticas.
5.7.1 Isostáticas:
Se definen como las envolventes de las tensiones principales. Por tanto cada punto de
una pieza bajo estudio tiene dos isostáticas: una corresponde a σI y otra corresponde a
σII y además son perpendiculares entre sí.
Hay que decir que cada punto de un sólido tiene un estado tensional definido por un
tensor de tensiones, y que dependiendo de cómo se oriente el punto estará sometido, o
no, a un estado de tensiones principal. Pues bien la curva tangente a todas y cada una de
las tensiones principales es una isostática. La forma de obtener la ecuación
correspondiente es partiendo del resultado hallado anteriormente del ángulo que la
tensión principal forma con la dirección positiva del eje X
Tag 2α =
2σ 12
2 tag α
=
σ 11 − σ 22 1 − tag 2α
Introduciendo en la expresión
tagα =
dx2
dx1
Se obtiene:
2
dx2 σ 11 − σ 22 dx2
−1 = 0
+
σ 12 dx1
dx1
cuya raíces son:
5-31
CAPÍTULO V
dx2
σ − σ 22
= − 11
±
σ 12
dx1
22
2
σ 11 − σ 22
+ 1
σ 12
5-32
La ecuación anterior es una ecuación diferencial cuya integral son dos familias
representativas de las denominadas Isostáticas.
Se denomina punto singular aquel en que se cumple que: σ 11 = σ 22 y σ 12 = 0
Si un punto es singular y además se cumple que: σ 11 = σ 22 = σ 12 = 0 entonces se dice
que es neutro
5.7.2 Isoclinas:
Son líneas que unen puntos en que las tensiones principales tienen igual inclinación. La
forma de hallarlas es partiendo de la ecuación 6-20 e igualándola a una constante.
σI
σ11
σ12
σ22
α
σII
Figura 5-21
Tag 2α =
2σ 12
2 tag α
=
=k
σ11 − σ 22 1 − tag 2α
5-33
haciendo:
Tagα = m
se obtiene:
2σ 12
2m
=
σ11 − σ 22 1 − m 2
σ − σ 22
→ m 2 + 11
m −1 = 0
σ12
5-34
Ecuación en la que dando valores al parámetro m se van obteniendo las distintas
isoclinas
5.7.3 Isocromáticas:
Son líneas que unen puntos en que la diferencia de las tensiones principales es
constante, es decir.
CAPÍTULO V
23
σ I − σ II = k
5-35
Dado que la tensión tangencial máxima es:
(Tτ )max = σ I − σ II
2
Resulta que las isocromáticas son líneas en que la tensión tangencial máxima es
constante
5.8
Estado Plano Termoelástico.
En el capítulo IV se dedujo el estado termoelástico general. A partir de él se puede
particularizar y obtener el caso plano tanto en tensión como en deformación plana.
Caso deformación plana termoelástica.
Las ecuaciones de comportamiento son:
1+ v
v
σ 11 − ( σ 11 + σ 22 + σ 33 ) + α ∆T
E
E
1+ v
v
ε 22 =
σ 22 − ( σ11 + σ 22 + σ 33 ) + α ∆T
E
E
1+ v
v
ε 33 =
σ 33 − ( σ 11 + σ 22 + σ 33 ) + α ∆T = 0
E
E
ε11 =
5-36
Despejando σ33 de la tercera y sustituyendo en las otras dos:
1+ v
v
σ 11 − [ (σ 11 + σ 22 )(1 + v ) − Eα ∆T ] + α ∆T
E
E
1+ v
v
ε 22 =
σ 22 − [ (σ 11 + σ 22 )(1 + v ) − Eα ∆T ] + α ∆T
E
E
ε11 =
5-37
Reordenando y añadiendo las componentes tangenciales da finalmente:
1+ v
[ σ11 − v ( σ11 + σ 22 )] + (1 + v )α ∆T
E
1+ v
[ σ 22 − v ( σ11 + σ 22 )] + (1 + v )α ∆T
ε 22 =
E
1+ v
ε12 =
σ 12
E
ε11 =
5-38
Que representan a las ecuaciones de Hooke termoelásticas plana para el caso de
deformación plana. Invirtiéndolas se obtienen las ecuaciones de Lamé en deformación
plana:
CAPÍTULO V
E
α ∆T
1 − 2v
E
σ 22 = 2 G ε 22 + λ (ε11 + ε 22 ) −
α ∆T
1 − 2v
σ 12 = 2 G ε12
24
σ 11 = 2 G ε11 + λ (ε11 + ε 22 ) −
55-39
Para el caso de Tensión Plana:
Se parte de las ecuaciones de Lamé termoelásticas en 3D:
E
α ∆T
1 − 2v
E
σ 22 = 2 G ε 22 + λ (ε11 + ε 22 + ε 33 ) −
α ∆T
1 − 2v
E
σ 33 = 2 G ε 33 + λ (ε11 + ε 22 + ε 33 ) −
α ∆T = 0
1 − 2v
σ 11 = 2 G ε11 + λ (ε11 + ε 22 + ε 33 ) −
5-40
Despejando σ33 y sustituyendo en las dos primeras se obtiene, después de algunas
manipulaciones, las ecuaciones de Lamé termoelásticas en dos dimensiones para el caso
de tensión plana:
2 Gv
(ε11 + ε 22 ) − E α ∆T
1− v
1 − 2v
2 Gv
(ε11 + ε 22 ) − E α ∆T
σ 22 = 2 G ε 22 +
1− v
1 − 2v
σ 12 = 2 G ε12
σ 11 = 2 G ε11 +
5-41
La ley de Hooke para el caso termoelástico en tensión plana es:
v
1+ v
σ 11 − [ (σ 11 + σ 22 ) ] + α ∆T
E
E
v
1+ v
ε 22 =
σ 22 − [ (σ 11 + σ 22 ) ] + α ∆T
E
E
1+ v
ε12 =
σ 12
E
ε11 =
5-42