Propuesta Tecnica
Anuncio

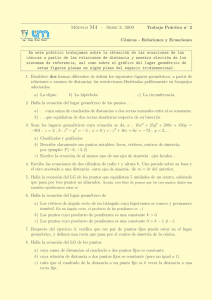
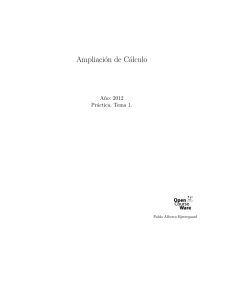
High Technology in Geophysics DataSeismic Soporte Teórico - P. Connolly The smart way to better decisions_ REPORTE “Elastic Impedance” by P. Connolly (The Leading Edge, 1999) Dr. Danilo R. Velis CONICET Facultad de Ciencias Astronómicas y Geofı́sicas UNLP Septiembre de 2007 Resumen El presente informe está basado en un análisis del trabajo de Patrick Connolly sobre impedancia elástica [Connolly, 1999]. Se desarrolla y explica en detalle cómo se obtienen cada una de las expresiones de las partes 1 y 2 del apéndice. Es decir, en qué consiste la linealización de las ecuaciones de Zoeppritz para el coeficiente de reflexión de la onda P en función del ángulo de incidencia (expresión (1.1)), cómo a partir de esta linealización se llega a la expresión (1.2) con la que se calcula la impedancia elástica definida por Connolly, cómo se construyen los angle stacks y cómo se transforman los gathers del dominio del offset al dominio del ángulo (expresiones (2.1) y (2.2)), etc. En cada caso se detallan las aproximaciones realizadas y la validez de las expresiones obtenidas. Índice general 1. Parte 1: Las ecuaciones de Zoeppritz y la Impedancia Elástica (EI) 2 1.1. Introducción: Snell y Zoeppritz . . . . . . . . . . . . . . . . . . . . . . . . 2 1.2. Derivación de la ecuación (1.1) . . . . . . . . . . . . . . . . . . . . . . . . . 5 1.3. Derivación de la ecuación (1.2) . . . . . . . . . . . . . . . . . . . . . . . . . 9 2. Parte 2: Angle Stacks 13 2.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 2.2. Derivación de la ecuación (2.1) . . . . . . . . . . . . . . . . . . . . . . . . . 14 2.3. Derivación de la ecuación (2.2) . . . . . . . . . . . . . . . . . . . . . . . . . 17 2 Capı́tulo 1 Parte 1: Las ecuaciones de Zoeppritz y la Impedancia Elástica (EI) 1.1. Introducción: Snell y Zoeppritz Una onda sı́smica que incide sobre una discontinuidad del subsuelo sufrirá una partición de su energı́a. Parte de su energı́a se reflejará y parte se transmitirá a través de la discontinuidad. A su vez, la energı́a reflejada tendrá dos componentes: una onda reflejada compresiva (onda P reflejada) y una onda reflejada de corte o cizalla (onda S reflejada). Lo mismo ocurre para la energı́a transmitida. Esto se puede apreciar en la Figura 1.1, donde se muestra una onda P que incide con un ángulo θi sobre una discontinuidad (siempre medido con respecto a la normal) que separa dos medios con propiedades elásticas propias (lo mismo ocurre cuando la onda incidente es una onda S). Obviamente, la suma de todas las energı́as reflejadas y transmitidas será igual a la energı́a total de la onda incidente. Ahora bien, la propiedades fı́sicas del medio y del fenómeno de propagación de ondas hacen que la dirección con que se reflejan o transmiten las ondas varı́e de acuerdo a determinadas leyes. Por eso, una onda P que incide con un ángulo θi , se refleja como onda P con un ángulo θr , que resulta ser igual a θi , pero se transmite con un ángulo θt , que es en general diferente al ángulo de incidencia. La fórmula matemática que expresa esta relación está dada por la Ley de Snell1 : sin θi sin θr sin θt = = . Vp 1 Vp 1 Vp 2 (1.1) 1 La Ley de Snell puede derivarse a partir del famoso principio de Fermat de tiempos mı́nimos o estacionarios. Septiembre de 2007 Impedancia elástica - Danilo Velis 3 1.1. INTRODUCCIÓN: SNELL Y ZOEPPRITZ onda S reflejada (Rps ) onda P incidente (Ap = 1) onda P reflejada (Rpp ) φr θi θr Medio 1 Vp1 , Vs1 , ρ1 discontinuidad Medio 2 θt Vp2 , Vs2 , ρ2 φt onda P transmitida (Tpp ) onda S transmitida (Tps ) Figura 1.1: Tetrapartición de la energı́a de una onda P incidente en una discontinuidad horizontal. Claramente la primera igualdad implica que θi = θr . Por otro lado, ası́ como θi = θt , también resultan diferentes los ángulos de la onda S reflejada y de la onda S transmitida, como se ve en la figura, y tal como lo expresa la Ley de Snell cuando se tienen en cuenta ondas de corte. Ası́ sin φr sin φt sin θi = = . Vp 1 Vs 1 Vs 2 (1.2) Poniendo todo junto, podemos escribir la Ley de Snell, que ahora llamamos Ley de Snell generalizada, de la siguiente manera: sin θi sin θr sin θt sin φr sin φt = = = = = p, Vp 1 Vp 1 Vp 2 Vs 1 Vs 2 (1.3) donde p es conocido como el parámetro sı́smico del rayo y es constante para toda discontinuidad encontrada por el rayo sı́smico en su viaje desde la fuente hasta el receptor (geófono o hidrófono). Cada onda P, o cada onda S, tendrá su propio parámetro sı́smico, constante a lo largo de toda su trayectoria. Las ecuaciones de Zoeppritz son las fórmulas que permiten relacionar, en función del ángulo de incidencia, cuánta energı́a se transmite y cuánta se refleja, tanto para la Septiembre de 2007 Impedancia elástica - Danilo Velis 4 1.1. INTRODUCCIÓN: SNELL Y ZOEPPRITZ componente compresiva como de cizalla. Su derivación detallada es bastante compleja y requiere muchos pasos matemáticos y algunas hipótesis sobre el modelo de subsuelo (ondas planas en medios elásticos, isótropos y homogéneos). Esencialmente la idea es considerar una onda plana que incide con determinado ángulo sobre una interfase, y luego tener en cuenta que los deslazamientos de las partı́culas y las tensiones generadas a ambos lados de la discontinuidad deben ser iguales (por eso hablamos de un medio elástico, caso contrario habrı́a fracturas de los materiales y se perderı́a la validez del fenómeno de propagación de ondas como lo utilizamos en la sı́smica de exploración). Escribiendo entonces la igualdad de los desplazamientos y tensiones para cada una de las componentes en que se particiona la onda incidente, es que se obtienen las ecuaciones de Zoeppritz. Las ecuaciones de Zoeppritz en sı́ son también bastante complejas, pues relacionan no sólo las amplitudes de una onda P incidente (de amplitud Ap = 1) desde el medio 1 y desde el medio 2 con las de las onda P y S reflejadas y transmitidas a través de los coeficiente de reflexión y transmisión (ver Figura 1.1), sino también el caso análogo en que se tiene una onda S incidente, también desde el medio 1 y desde el medio 2. Estas relaciones involucran todos los coeficientes de reflexión y transmisión (Rpp , Rps , Rsp , Rss , Tpp , Tps , etc.) y todas las propiedades fı́sicas de los dos medios (velocidades y densidades). En el caso particular de la Figura 1.1 (onda P incidente desde el medio 1), las ecuaciones de Zoeppritz están conformadas por un sistema de cuatro ecuaciones con cuatro incógnitas, y se pueden escribir de la siguiente manera: ⎞ ⎛ cos φr − sin θt cos φt Rpp sin θi ⎟ ⎜ ⎜ cos θi − sin φ cos θ sin φ r t t ⎟ × ⎜ Rps ⎜ ⎝ sin 2θi a1 cos 2φr b1 sin 2θt −c1 cos 2φt ⎠ ⎝ Tpp cos 2φr −a2 sin 2φr −b2 cos 2φt −c2 sin 2φt Tps ⎛ ⎞ ⎛ ⎞ − sin θi ⎟ ⎜ cos θi ⎟ ⎟=⎜ ⎟ ⎠ ⎝ sin 2θi ⎠ , − cos 2φr (1.4) donde a1 = Vp 1 , Vs 1 a2 = Septiembre de 2007 b1 = Vs 1 , Vp 1 Vs2 Vp1 W2 , Vp2 Vs1 W1 b2 = Z2 , Z1 c1 = c2 = Vp1 W2 , Vs1 W1 W2 , Z1 (1.5) (1.6) Impedancia elástica - Danilo Velis 5 1.2. DERIVACIÓN DE LA ECUACIÓN (1.1) siendo Z1 , Z2 , W1 y W2 las correspondientes impedancias para las ondas P y S en cada uno de los medios: Z1 = ρ1 Vp1 , Z2 = ρ2 Vp2 , W1 = ρ1 Vs1 , W2 = ρ2 Vs2 . (1.7) Dado un ángulo de incidencia θi y las propiedades fı́sicas de los dos medios, estas ecuaciones se pueden resolver numéricamente y ası́ hallar los coeficientes de reflexión y transmisión correspondientes. Previamente, los ángulos θt , φr y φt deben ser calculados mediante la Ley de Snell generalizada. 1.2. Derivación de la ecuación (1.1) La ecuación (1.1) del trabajo de Connolly no es otra cosa que una aproximación de las ecuaciones de Zoeppritz (una simplificación matemática que es mucho más práctica que las ecuaciones completas) para el caso de una onda P incidente desde el medio 1, y teniendo en cuenta solamente el coeficiente de reflexión de la onda P reflejada (esta es la onda que usualmente se registra en un relevamiento sı́smico). A partir del sistema de ecuaciones (1.4) se puede despejar Rpp en función de los ángulos de incidencia, reflexión y de transmisión (y de los parámetros fı́sicos de los dos medios): Rpp = Rpp (θi , θt , φr , φt , Vp1 , Vp2 , Vs1 , Vs2 , ρ1 , ρ2 ). (1.8) Luego, mediante el uso de la Ley de Snell generalizada, ecuación (1.3), es posible eliminar los ángulos θt , φr y φt para finalmente obtener Rpp en función de θi y las velocidades y densidades de los dos medios solamente: Rpp = Rpp (θi , Vp1 , Vp2 , Vs1 , Vs2 , ρ1 , ρ2 ). (1.9) Este procedimiento es extremadamente tedioso, por lo cual no tiene sentido reproducirlo en este informe ([Aki and Richards, 2002] brinda algunos detalles, aunque no el desarrollo completo). La expresión final de Rpp resulta también extremadamente compleja (ver primera fórmula en la ecuación (5.40) en [Aki and Richards, 2002], p. 144). Por ello en la práctica se realizan simplificaciones para poder contar con una expresión matemática Septiembre de 2007 Impedancia elástica - Danilo Velis 6 1.2. DERIVACIÓN DE LA ECUACIÓN (1.1) mucho más manejable. Este último paso se conoce como “Linealización de las ecuaciones de Zoeppritz”, y puede repetirse para Rps , Tpp y Tps . La linealización consiste básicamente en asumir que los dos medios poseen propiedades similares. Para esto se asume que las siguientes relaciones son mucho menores que la unidad: ∆Vs 1, Vs ∆Vp 1, Vp ∆ρ 1, ρ (1.10) donde ∆Vp = Vp2 − Vp1 , Vp = V p 1 + Vp 2 , 2 ∆Vs = Vs2 − Vs1 , Vs = ∆ρ = ρ2 − ρ1 , V s 1 + Vs 2 , 2 ρ= ρ1 + ρ2 . 2 (1.11) (1.12) Además se asume que el ángulo de incidencia de la onda P es menor al ángulo crı́tico2 y que ningún otro ángulo se aproxima a 90o . Estas hipótesis son razonables para ángulos de incidencia no muy oblicuos y comienzan a perder validez para offsets muy lejanos. Todas estas suposiciones (medios “similares” y ángulos “pequeños”) permiten simplificar unos cuantos términos de la expresión completa para Rpp . La clave está en que algunas expresiones son reemplazadas por un desarrollo en serie, despreciándose luego los términos de orden cuadrático y superior en virtud de las hipótesis mencionadas (de allı́ que el procedimiento toma el nombre de “linealización”). Si al ángulo de incidencia lo llamamos θ en lugar de θi , y si al coeficiente de reflexión Rpp lo llamamos simplemente R, luego de numerosas operaciones algebraicas se obtiene finalmente la expresión (1.1) del trabajo de Connolly: R(θ) = A + B sin2 θ + C sin2 θ tan2 θ, donde 1 A= 2 ∆Vp ∆ρ + Vp ρ (1.13) , (1.14) 2 El ángulo crı́tico es aquel para el cual la onda incidente se refleja totalmente, es decir no hay onda transmitida. Matemáticamente, el ángulo de incidencia crı́tico es tal que θt = 90o, o sea θcritico = arcsin(Vp1 /Vp2 ), pues sin 90 = 1. Septiembre de 2007 Impedancia elástica - Danilo Velis 7 1.2. DERIVACIÓN DE LA ECUACIÓN (1.1) B= ∆Vp ∆Vs ∆ρ , − 4K − 2K 2Vp Vs ρ (1.15) 1 ∆Vp . 2 Vp (1.16) C= 1 K= 2 Vs22 Vs21 + Vp22 Vp21 . (1.17) Como se puede apreciar, el coeficiente de reflexión toma entonces valores diferentes de acuerdo al ángulo de incidencia θ. Esto significa que si la onda P incidente tiene una amplitud de 1, la onda reflejada tendrá una amplitud menor a la unidad e igual al valor expresado por la fórmula anterior. Es decir que la cantidad de energı́a transmitida o reflejada dependerá del ángulo de incidencia y de las propiedades fı́sicas de los dos medios. Cabe aclarar que la linealización realizada por Aki y Richards (2002), lleva a una expresión diferente, aunque equivalente, a la que se indica en el trabajo de Connolly, que es similar a la expresión debida a Shuey (1985). La diferencia entre la fórmula (1.1) del trabajo de Connolly y la de Shuey es la forma de expresar el coeficientes B. Shuey elimina Vs y ∆Vs e incorpora el coeficiente de Poisson, reordenando los términos de la aproximación de Aki y Richards de manera tal que resulten decrecientes en relación al ángulo de incidencia. El trabajo de Shuey fue el punto de partida para el comienzo de la aplicación práctica del AVO, ya que ahora era posible asociar diferentes rangos de ángulos a diferentes términos de la aproximación. Hay que tener bien presente que por tratarse la (1.13) de una aproximación, el valor calculado con esta fórmula no es exacto, y los errores serán mayores cuanto mayor sea el ángulo de incidencia (y cuanto mayor sea el contraste de los parámetros fı́sicos de los dos medios). La Figura 1.2 muestra un ejemplo de cómo varı́a el coeficiente de reflexión versus el ángulo de incidencia utilizando la solución exacta dada por Zoeppritz, y la aproximación anterior utilizando dos y tres términos. Como consecuencia, la fórmula (1.13) puede considerarse válida solamente para ángulos menores al ángulo crı́tico y para medios relativamente similares. No obstante ello, la aproximación es de suma utilidad en exploración sı́smica puesto que permite sacar el máximo provecho de la información de Septiembre de 2007 Impedancia elástica - Danilo Velis 8 1.2. DERIVACIÓN DE LA ECUACIÓN (1.1) 0.035 Zoeppritz A + B sin2θ A + B sin2θ + C sin2θ tg2θ 0.03 0.025 0.02 R(θ) 0.015 0.01 0.005 0 -0.005 -0.01 -0.015 0 10 20 30 θ (grados) 40 50 60 Figura 1.2: Comparación entre el coeficiente de reflexión exacto calculado a través de las ecuaciones de Zoeppritz, y el coeficiente de reflexión aproximado cuando se utilizan dos y tres términos en la ecuación (1.13). En el ejemplo, Vp1 = 3,0 km/s, Vp2 = 3,1 km/s, Vs1 = 1,4 km/s, Vs2 = 1,5 km/s, ρa = 2,4 gr/cc y ρb = 2,42 gr/cc. AVO contenida en los datos pre-stack, especialmente para el desarrollo de indicadores de presencia de hidrocarburos. Incidencia normal Cuando se tiene una onda P que incide normalmente a la discontinuidad (θi = 0), como se sabe no hay conversión a onda S, por lo que Rps = Tps = 0. Luego, el sistema de ecuaciones de Zoeppritz (1.4) queda reducido solamente a las dos ecuaciones que involucran a los coeficientes no-nulos, o sea Rpp y Tpp , o sea Rpp + Tpp = 1 Rpp − b2 Tpp = −1, (1.18) de donde se obtiene fácilmente Rpp = b2 − 1 = b2 + 1 Z2 Z1 Z2 Z1 −1 +1 = Z2 − Z1 , Z2 + Z1 (1.19) que es la clásica expresión del coeficiente de reflexión para incidencia normal expresado como un contraste de impedancias acústicas. Septiembre de 2007 Impedancia elástica - Danilo Velis 9 1.3. DERIVACIÓN DE LA ECUACIÓN (1.2) 1.3. Derivación de la ecuación (1.2) De la misma manera que el coeficiente de reflexión para una onda P con incidencia normal se expresa como un contraste de impedancias acústicas, se puede definir un coeficiente de reflexión (elástico) como un contraste de impedancias elásticas3 , ahora para el caso que se tienen ángulos de incidencia no-nulos: R(θ) = f2 − f1 , f2 + f1 (1.20) donde f = f (θ) es la impedancia elástica que queremos hallar. En el trabajo de Connolly se utiliza la aproximación logarı́tmica para el coeficiente de reflexión, que generalmente se la considera válida para coeficientes menores a ±0,3 (pequeños a moderados contrastes de impedancia). En efecto, la ecuación anterior se puede reescribir como R(θ) = ∆f 2 f1 +f2 2 = 1 ∆f , 2 f¯ (1.21) donde hemos definido ∆f = f2 − f2 f1 + f2 y f¯ = . 2 (1.22) Luego, asumiendo que ∆f es pequeño4 , podemos asociar el incremento ∆ con un diferencial; y dado que la derivada del logaritmo de una variable cualquiera x es igual a 1/x por la derivada de x, es decir d(ln x) = dx/x, se obtiene entonces 1 R(θ) ∆ ln f, 2 (1.23) que es la aproximación logarı́tmica mencionada. Usando entonces la aproximación (1.13) y las definiciones para A, B y C vistas más arriba, se tiene 3 Por convención usamos el término “acústico” para casos de incidencia normal de una onda compresiva P, ya que no se producen conversiones a onda S, y la onda compresiva es del mismo tipo que la onda de sonido. El término “elástico” queda reservado para cuando se tiene incidencia oblicua, donde sı́ hay conversiones de modo. 4 Recordar que todo el análisis solamente es válido para contrastes de impedancia relativamente pequeños, que era una de las hipótesis hechas en la linealización de las ecuaciones de Zoeppritz. Septiembre de 2007 Impedancia elástica - Danilo Velis 10 1.3. DERIVACIÓN DE LA ECUACIÓN (1.2) ∆Vp ∆ρ ∆Vp ∆Vs ∆ρ + sin2 θ + + − 4K − 2K Vp ρ 2Vp Vs ρ 1 ∆Vp sin2 θ tan2 θ, + 2 Vp 1 1 ∆ ln EI = 2 2 (1.24) donde hemos reemplazado la letra f por la EI, la impedancia elástica. Usamos ahora la relación sin2 θ tan2 θ = (1 − cos2 θ) tan2 θ = tan2 θ − sin2 θ. (1.25) Aplicando la propiedad distributiva: ∆Vp ∆ρ ∆Vp ∆Vs 1 ∆ ln EI = + sin2 θ − 4K sin2 θ − + 2 2Vp 2ρ 2Vp Vs ∆Vp ∆Vp ∆ρ 2 sin θ + tan2 θ − sin2 θ , − 2K ρ 2Vp 2Vp (1.26) que cancelando y reagrupando queda 1 ∆Vp ∆Vs ∆ρ 1 ∆ ln EI = ( − 2K sin2 θ) (1 + tan2 θ) − 4K sin2 θ + 2 2Vp Vs ρ 2 1 ∆Vp ∆Vs ∆ρ 2 2 2 (1 − 4K sin θ) . = (1 + tan θ) − 8K sin θ + 2 Vp Vs ρ (1.27) Utilizando nuevamente el hecho que d(ln x) = dx/x ∆x/x, con x = Vp , Vs y ρ sucesivamente, y cancelando el factor 1/2, se tiene ∆ ln EI = (1 + tan2 θ)∆ ln(Vp ) − 8K sin2 θ∆ ln(Vs ) + (1 − 4K sin2 θ)∆ ln(ρ), (1.28) que podemos reescribir como ∆ ln EI = ∆ (1 + tan2 θ) ln(Vp ) − ∆ 8K sin2 θ ln(Vs ) + ∆ (1 − 4K sin2 θ) ln(ρ) , (1.29) ya que θ es constante y K se asume como tal, y por ende pueden estar dentro o fuera de la diferenciación. Usamos ahora la siguiente regla: Septiembre de 2007 Impedancia elástica - Danilo Velis 11 1.3. DERIVACIÓN DE LA ECUACIÓN (1.2) ln xa = a ln x. (1.30) Entonces, reemplazando x y a por las expresiones entre corchetes correspondientes de la ecuación (1.29), se tiene sucesivamente ⎧ ⎪ ⎨ x = Vp , a = (1 + tan2 θ) x = Vs , a = 8K sin2 θ ⎪ ⎩ x = ρ, a = (1 − 4K sin2 θ) ⇒ ⇒ ⇒ (1+tan2 θ) (1 + tan2 θ) ln(Vp ) = ln Vp 2 2 8K sin θ ln(Vs ) = ln Vs8K sin θ 2 (1 − 4K sin2 θ) ln(ρ) = ln ρ(1−4K sin θ) , (1.31) entonces 2 2 2 ∆ ln EI = ∆ ln Vp(1+tan θ) − ∆ ln Vs8K sin θ + ∆ ln ρ(1−4K sin 2 2 2 = ∆ ln Vp(1+tan θ) − ln Vs8K sin θ + ln ρ(1−4K sin θ) 2 2 2 = ∆ ln Vp(1+tan θ) Vs−8K sin θ ρ(1−4K sin θ) , θ) (1.32) donde hemos utilizado las propiedades ln(xyz) = ln x + ln y + ln z y ln x−1 = − ln x. (1.33) Finalmente, para obtener la impedancia elástica a partir del desarrollo anterior, basta con integrar para deshacernos del diferencial. Si llamamos sucesivamente x = ln EI y x igual al logaritmo del último corchete de la expresión anterior, como ∆x = x + C, (1.34) se obtiene, haciendo la constante de integración C igual a cero, EI = Vp(1+tan 2 θ) 2 2 Vs−8K sin θ ρ(1−4K sin θ) , (1.35) que es la expresión (1.2) del trabajo de Connolly. La expresión (1.3) del trabajo de Connolly es otra forma de escribir la anterior, factorizando Vp , es decir: Vp(1+tan 2 θ) = Vp Vptan Septiembre de 2007 2 θ ⇒ 2 2 2 EI = Vp Vptan θ Vs−8K sin θ ρ(1−4K sin θ) , (1.36) Impedancia elástica - Danilo Velis 12 1.3. DERIVACIÓN DE LA ECUACIÓN (1.2) que es igual a la (1.3) del trabajo de Connolly. Por lo tanto, si se tienen los sónicos y la densidad, se puede calcular la impedancia acústica para cada ángulo de incidencia mediante alguna de las dos fórmulas anteriores. Vale la pena recordar nuevamente que estas expresiones son válidas para ángulos de incidencia pequeños a moderados (definitivamente menores al ángulo crı́tico y a 90o ), y cuando los cambios en los parámetros elásticos (velocidades y densidad) no son demasiado abruptos. Además K debe poder asumirse como constante o muy poco variable. En la práctica se debe estimar un valor de K a ser utilizado para toda la ventana temporal considerada, lo cual no suele representar una dificultad porque en general la relación entre Vp y Vs es lineal [Castagna et al., 1985]. En resumen, cuando se tiene incidencia normal, uno considera el coeficiente de reflexión para incidencia normal dado por la ecuación (1.19) done está involucrada la impedancia acústica Z. En este contexto, sólo entra en juego la velocidad compresiva Vp y la densidad ρ. Un modelo más realista se tiene cuando se considera incidencia oblicua, y en este caso una buena aproximación para el coeficiente de reflexión para las ondas compresivas y válida para ángulos no muy grandes viene dada por la expresión (1.1) del trabajo de Connolly (obtenida a partir de la linealización de las ecuaciones de Zoeppritz). Este coeficiente de reflexión involucra, además de Vp y ρ, también la velocidad de la onda de corte, Vs , ya que cuando hay incidencia oblicua existe conversión de onda P a onda S, y este fenómeno de partición de la energı́a debe tenerse en cuenta a la hora de calcular los coeficientes de reflexión. Entonces, en este caso hablamos de impedancia elástica, que la llamamos EI y la calculamos con alguna de las fórmulas anteriores. Notar que tendremos un perfil de impedancia elástica por cada ángulo de incidencia que utilicemos. La importancia del análisis de AVO radica en que a partir de la adquisición sı́smica de ondas P reflejadas con ángulos de incidencia diferentes para un mismo CDP, es posible extraer información del coeficiente de reflexión “elástico”, que a su vez contiene información de la onda de corte S. Contrariamente a lo que ocurre con la sı́smica post-stack convencional, que no contiene información alguna sobre las ondas S, con un análisis de AVO es posible identificar indicios de la presencia de hidrocarburos. Septiembre de 2007 Impedancia elástica - Danilo Velis 13 Capı́tulo 2 Parte 2: Angle Stacks 2.1. Introducción Los datos sı́smicos pre-stack están en el dominio del offset, en tanto que todo el análisis de AVO de la sección anterior pertenece al dominio del ángulo (de incidencia). Por ello, para poder sacar conclusiones acerca de los parámetros elásticos del subsuelo (por ejemplo mediante la inversión elástica de los angle stacks), es necesario pasar los datos del domino del offset al domino del ángulo, para luego sı́ construir un angle stack apilando la trazas adecuadas para algún rango de ángulos de interés. Para la construcción de un angle stack existen dos formas descriptas por Connolly, una basada en ciertas funciones de peso que deben ser aplicadas a las trazas a apilar, y la otra basada en un apilamiento convencional, pero que toma en cuenta solamente un rango de offsets determinados por ciertas funciones de mute. En general el procedimiento para pasar del domino del offset al dominio del ángulo, previo a la construcción del angle stack, es bastante complejo, pero resulta relativamente sencillo si se utiliza la teorı́a de rayos y se realizan algunas aproximaciones. Estas aproximaciones implican que el proceso será solamente válido para ángulos de incidencia moderados a pequeños (menores que 30 − 35o )1 , y para un modelo de subsuelo consistente en una sucesión de capas horizontales, planas e isótropas (“layer-cake geometry”). Septiembre de 2007 Impedancia elástica - Danilo Velis 14 2.2. DERIVACIÓN DE LA ECUACIÓN (2.1) x A z θ C v θ B z A Figura 2.1: Geometrı́a de los rayos reflejados en un modelo de una sola capa. 2.2. Derivación de la ecuación (2.1) Consideremos primero un modelo de subsuelo con una sola capa horizontal de espesor z y velocidad constante v (ver Figura 2.1). Si t0 es el tiempo de ida y vuelta para incidencia normal (TWT), t0 = 2z v ⇒ z= vt0 . 2 (2.1) Luego, a partir de la figura, tan θ = x x/2 = . z vt0 (2.2) Esta expresión nos permitirá calcular en forma exacta cuál es el ángulo θ para cada offset, para el modelo de una capa, dada su velocidad y el TWT. De esta forma, las amplitudes de un gather en el dominio del offset pueden ser mapeadas al dominio del ángulo. Aplicando el Teorema de Pitágoras sobre el triángulo AA C, es muy sencillo ver cuál es la relación tiempo-distancia para el modelo anterior: (A C)2 = (ABC)2 = (A A)2 + x2 = (2z)2 + x2 . (2.3) Dividiendo todo por v 2 , se tiene 1 Notar que bajo esta hipótesis se asumen rayos esencialmente verticales. En otras palabras, podemos decir que se asume que el offset es significativamente menor que la profundidad de las capas del subsuelo en cuestión: x z. Septiembre de 2007 Impedancia elástica - Danilo Velis 15 2.2. DERIVACIÓN DE LA ECUACIÓN (2.1) x A C v1 v2 B Figura 2.2: Geometrı́a de los rayos reflejados en un modelo de dos capas. ABC v 2 = 2z v 2 + x2 , v2 (2.4) de donde surge inmediatamente que t2 = t20 + x2 . v2 (2.5) Esta expresión es la clásica hipérbola de las reflexiones. Pero cuando se tienen dos o más reflectores horizontales, los rayos se refractan en cada uno produciendo un rayo complejo (ver Figura 2.2). Como consideramos x z (o sea ángulos de incidencia relativamente pequeños), resulta una buena aproximación asumir que el rayo sigue la trayectoria indicada con lı́nea punteada. Como consecuencia, la curva de tiempo de viaje sigue siendo hiperbólica (como el caso de una capa sola vista recién), pero la velocidad del conjunto de capas superiores al reflector en cuestión debe ser reemplazada por la velocidad media v̄n , o más precisamente, la velocidad cuadrática media, vrn 2 . La velocidad cuadrática media se define como [Dix, 1955]: vr2n n 2 vi τi = i=1 , n i=1 τi (2.6) donde n es el número de capas por encima del reflector en cuestión, τi es el tiempo que el rayo demora en atravesar la capa i−ésima y vi son las velocidades interválicas. Por lo tanto, para offsets pequeños (x z), el tiempo total del rayo reflejado en el reflector enésimo a una profundidad z, puede escribirse como: 2 El subı́ndice n denota el número de capas para las cuales se define la velocidad correspondiente. Septiembre de 2007 Impedancia elástica - Danilo Velis 16 2.2. DERIVACIÓN DE LA ECUACIÓN (2.1) t2n t20 + x2 , vr2 (2.7) donde ahora t0 viene dado por t0 = 2z . vr (2.8) Ahora bien, para hallar la relación entre el offset x y el ángulo de incidencia θ, debemos recurrir al parámetro sı́smico del rayo, p, ya visto al principio de este informe cuando repasamos la Ley de Snell, y que repetimos a continuación: sin θ , vi p= (2.9) donde vi es la velocidad interválica de una capa cualquiera. Como es sabido, el parámetro sı́smico (constante a lo largo de toda la trayectoria del rayo) es también igual a la derivada con respecto al offset del tiempo de propagación: p= dtn . dx (2.10) Luego, diferenciando la ecuación (2.7), 2tn dtn = 2x dx vr2 ⇒ x dtn = , dx vr tn (2.11) Igualando entonces esta expresión con la del parámetro sı́smico en función del ángulo, surge p= dtn sin θ = vi dx ⇒ sin θ = vi dtn xvi = 2 , dx vr tn (2.12) de donde, reemplazando tn por la fórmula (2.7), sin2 θ = x2 vi2 x2 vi2 = , 2 vr2 (x2 + vr2 t20 ) vr2 (t20 + xv2 ) (2.13) r que es la expresión (2.1) del trabajo de Connolly. De la misma forma que la ecuación (2.2) nos permitı́a mapear las amplitudes del dominio del offset al dominio del ángulo para el caso de un modelo de una sola capa, la expresión anterior nos permitirá mapear las amplitudes de un dominio al otro cuando se tiene un modelo de capas horizontales y Septiembre de 2007 Impedancia elástica - Danilo Velis 17 2.3. DERIVACIÓN DE LA ECUACIÓN (2.2) planas, y los ángulos de incidencia son relativamente pequeños. Si los ángulo de incidencia no son pequeños, la aproximación debida a Dix, ecuación (2.7) carecerı́a de validez, y por lo tanto el mapeo que acabamos de describir será incorrecto. Pero cómo aplicar la fórmula anterior para nuestro mapeo si no conocemos las velocidades interválicas?. Una forma serı́a utilizar una ley de velocidades uniforme extraı́da de algún pozo representativo para todo un cubo (sólo utilizable para zonas muy “tranquilas”), o bien mediante el uso de la fórmula de Dix, que permite calcular la velocidad interválica de la capa enésima a partir de las velocidades cuadráticas medias correspondientes a las capas por encima de la capa en cuestión: vn = vr2n tn − vr2n−1 tn−1 tn − tn−1 1/2 . (2.14) Las velocidades cuadráticas medias se obtienen por ejemplo tras horizontalizar los reflectores en cada uno de los gathers (velocidades del stacking), y las interválicas se calculan entonces sucesivamente mediante la fórmula anterior. 2.3. Derivación de la ecuación (2.2) La ecuación (1.1) del trabajo de Connolly muestra que las amplitudes de las reflexiones varı́an con el ángulo de incidencia, y que depende esencialmente de los tres coeficientes A, B y C definidos en (1.14), (1.15) y (1.16), respectivamente. Éstos, a su vez, dependen de los siguientes tres parámetros (“reflectividades”) de interés: ∆Vp , Vp ∆Vs Vs y ∆ρ . ρ (2.15) Puesto que el objetivo es obtener estos parámetros a partir de datos pre-stack, es necesario hacer un ajuste de los mismos (o sea comparar lo valores de amplitud de los datos con los del modelo predicho por la aproximación dada por (1.1) en el trabajo de Connolly). En la práctica se encuentra que los tres términos de (1.1) del trabajo de Connolly cobran mayor importancia a medida que θ aumenta. Es decir, A es importante para incidencia normal, B sin2 θ tiene relevancia para ángulos intermedios y C sin2 θ tan2 θ cobra sentido solamente para ángulos grandes [Shuey, 1985], aunque siempre menores que Septiembre de 2007 Impedancia elástica - Danilo Velis 2.3. DERIVACIÓN DE LA ECUACIÓN (2.2) 18 el ángulo crı́tico, por supuesto. Por ello, en general se desestima el último término y se obtiene la aproximación de dos términos: R(θ) = A + B sin2 θ, (2.16) que es válida para θ hasta 30o–35o solamente. Esta expresión claramente indica que el coeficiente de reflexión es lineal con respecto a sin2 θ, ya que si llamamos X = sin2 θ e Y = R(θ), se tiene la ecuación de una recta que corta al eje de las Y en A (intercept), y cuya pendiente es B (gradient): Y = A + BX. (2.17) Estas dos cantidades constituyen unos de los principales atributos de AVO utilizados como indicadores de la presencia de hidrocarburos3 . Pero en la práctica, dado que no conocemos las “reflectividades” (2.15) y por lo tanto no conocemos los valores numéricos de A y B, es necesario algún procedimiento para poder calcular esta recta a partir de los datos pre-stack. Una forma de hacer esto es lo que se conoce como el “weighted stack”. Weighted stack La idea central en la construcción de un weighted stack consiste en ajustar las amplitudes de los datos pre-stack para un determinado nivel (por ejemplo un reservorio) mediante una recta utilizando el método de mı́nimos cuadrados. Esto se hace ası́ porque es obvio que los datos de amplitud extraı́dos de los datos no se alinearán en forma exacta como una recta (debido a errores en el modelo, ruido en los datos, etc., etc.). Por ello, una forma práctica es tratar de buscar una recta que pase lo más cerca posible por la mayorı́a de esos puntos (valores de amplitud leı́dos de los datos). Este procedimiento se conoce también como regresión lineal. La regresión lineal la podemos resumir ası́. Supongamos que a partir de los datos prestack obtenemos los puntos (Xi , Yi ), con i = 1, 2, · · · , N (N = fold del stack), para algún 3 Existen varias expresiones de dos términos desarrolladas por diferentes autores. Las mismas difieren en la forma de expresar el intercept y el gradiente. Por ejemplo [Shuey, 1985] expresa el gradiente en función del coeficiente de Poisson, lo que permite relacionar los cambios en el atributo gradiente con la saturación de fluidos en las rocas el reservorio. Septiembre de 2007 Impedancia elástica - Danilo Velis 19 2.3. DERIVACIÓN DE LA ECUACIÓN (2.2) reflector en particular. Para hallar la recta que mejor se ajusta a estos puntos escribimos el error E= N (A + BXi − Yi )2 , (2.18) i=1 que nos mide la suma de todas las discrepancias (distancias) al cuadrado entre la recta de ecuación Y = A + BX y cada uno de los puntos medidos sobre los datos. Para obtener el mejor ajuste, debemos variar A y B hasta hallar los valores óptimos que produzcan el menor error posible. Variamos entonces estos valores calculando la derivada del error con respecto a cada una de estas dos variables (derivadas parciales): ⎧ ⎨ ⎩ ∂E ∂A = 2 ∂E ∂B = 2 i (A + BXi − Yi ) i (A + BXi − Yi )Xi . (2.19) donde todas las sumatorias van de i = 1 hasta N. Como el mı́nimo de una función se corresponde con el valor para el cual la derivada es cero, debemos igualar las dos expresiones anteriores a cero, con lo que nos queda un sistema de dos ecuaciones con dos incógnitas, A y B: ⎧ ⎨ i (A + BXi − Yi) = 0 ⎩ (A + BXi − Yi)Xi = 0. i (2.20) Ahora procedemos a despejar B, y luego calcularemos A. Desarrollando se obtiene ⎧ ⎨ ΣA + ΣBXi − ΣYi = NA + BΣXi − ΣYi = 0 ⎩ ΣAXi + ΣBX 2 − ΣYi Xi = AΣXi + BΣX 2 − ΣXi Yi = 0, i i (2.21) y despejando A y BΣXi2 , ⎧ ⎨ A = (ΣYi − BΣXi )/N ⎩ BΣX 2 = ΣX Y − AΣX . i i i i (2.22) Reemplazando la primera expresión en la segunda, BΣXi2 = ΣXi Yi − Septiembre de 2007 ΣYi ΣXi B(ΣXi )2 ΣYi − BΣXi ΣXi = ΣXi Yi − + N N N (2.23) Impedancia elástica - Danilo Velis 20 2.3. DERIVACIÓN DE LA ECUACIÓN (2.2) Ahora multiplicamos todo por N y agrupamos: NBΣXi2 − B(ΣXi )2 = B[NΣXi2 − (ΣXi )2 ] = NΣXi Yi − ΣYi ΣXi , (2.24) y luego despejamos B: N NXi − ΣXi NΣXi Yi − ΣYi ΣXi , = Yi B= NΣXi2 − (ΣXi )2 NΣXi2 − (ΣXi )2 i=1 (2.25) que es la expresión para el gradient en el trabajo de Connolly. Para hallar el intercept, basta con reemplazar la expresión anterior en la primera de las ecuaciones (2.22): A= ΣXi ΣYi −B N N ΣYi = − N NΣXi Yi − ΣYi ΣXi ΣXi NΣXi2 − (ΣXi )2 N = ΣYi ΣXi Yi ΣXi − ΣYi (ΣXi )2 /N − N NΣXi2 − (ΣXi )2 = ΣYi [NΣXi2 − (ΣXi )2 ] − NΣXi Yi ΣXi + ΣYi (ΣXi )2 N [NΣXi2 − (ΣXi )2 ] = NΣYi ΣXi2 −ΣYi (ΣXi )2 − NΣXi Yi ΣXi +ΣYi (ΣXi )2 N [NΣXi2 − (ΣXi )2 ] = N ΣYi ΣXi2 − N ΣXi Yi ΣXi N [NΣXi2 − (ΣXi )2 ] = N Yi i=1 (2.26) ΣXi2 − Xi ΣXi , NΣXi2 − (ΣXi )2 Que es la expresión dada por Connolly. Finalmente, reemplazando las expresiones para A y B recién halladas en la ecuación de la recta (2.16), obtenemos la expresión para calcular la amplitud correspondiente a cualquier angle stack: R(θ) = N i=1 Yi ΣXi2 − Xi ΣXi NXi − ΣXi 2 . + sin θ NΣXi2 − (ΣXi )2 NΣXi2 − (ΣXi )2 (2.27) Resumamos un poco todo este procedimiento. La ecuación de la recta (2.16) nos da el valor del coeficiente de reflexión de la onda P (valor teórico) en función del ángulo Septiembre de 2007 Impedancia elástica - Danilo Velis 21 2.3. DERIVACIÓN DE LA ECUACIÓN (2.2) de incidencia (siempre y cuando éste sea menor a 30-35o). Pero como en la práctica los coeficientes A y B no se conocen se los estima a partir de los datos por mı́nimos cuadrados tras ajustar el modelo (la recta definida por A y B) a las amplitudes Yi tomadas de un gather previamente convertido del dominio del offset al dominio del ángulo utilizando la ecuación (2.13). Este modelo se puede escribir entonces como se ve en la expresión anterior. Claramente, el coeficiente de reflexión para un ángulo determinado θ, resulta igual a una suma pesada de todas las amplitudes Yi consideradas. El peso asignado a cada una de las amplitudes está dado por la expresión entre corchetes de la ecuación anterior. Estas son las weighting functions del trabajo de Connolly, que se encuentran graficadas en la Figura A1 para diferentes valores de θ. O sea, para calcular el coeficiente de reflexión para un ángulo determinado, que siguiendo a Connolly denominamos amplitud A(θ), las amplitudes de cada traza del gather deben ser pesadas (multiplicadas) por el valor de esta función, y luego sumadas. Esto constituye un finite angle stack, por analogı́a con un stack convencional4 . Para evitar las variaciones con el offset de las amplitudes, en la práctica muchas veces se calculan los llamados “near-offset” o “far-offset” stacks. Estos stacks utilizan pesos unitarios, como un stack convencional, pero se calculan a partir de un rango limitado de ángulos. Según Connolly, estos stacks parciales se asemejan a un “finite angle” stack con θ = 0 (“intercept stack”) o con ángulos intermedios (“midangle stack”), respectivamente. Para θ = 90o también es posible calcular un finite angle stack (“Poisson’s ratio stack”), pero teniendo en cuenta que no será más que una proyección de un stack verdadero para θ = 90o . Este stack apunta a explotar las diferencias entre un near-offset y un far-offset stack, y está usualmente asociado a cambios en el coeficiente de Poisson. Lamentablemente este stack es muy sensitivo al moveout residual y a problemas con la ondı́cula (fase, ancho de banda, etc) siempre presentes en las trazas lejanas, por lo que resulta muy difı́cil hacer estimaciones del coeficiente de Poisson a partir de las trazas con ondas compresivas solamente. 4 En un stack convencional todas las trazas son sumadas con peso igual a la unidad. Septiembre de 2007 Impedancia elástica - Danilo Velis 22 2.3. DERIVACIÓN DE LA ECUACIÓN (2.2) Funciones de mute Existe otro procedimiento para generar un angle stack, que consiste en utilizar funciones de mute apropiadas. Como sabemos, para cada offset tendremos un valor de sin2 θ de acuerdo a la ecuación (2.13). Luego, dado un rango de offsets x1 –x2 , podemos calcular el valor medio del sin2 θ correspondiente. Para ello, integramos (sumamos) la ecuación (2.13) con respecto a x en el rango mencionado, y dividimos por x2 −x1 para obtener el promedio: 1 sin θ = x2 − x1 2 x2 x1 x2 x2 vi2 dx 2 2 2 2 x1 vr (x + vr t0 ) 2 x2 x2 1 vi = dx. 2 2 2 x2 − x1 vr x1 x + vr t0 1 sin θdx = x2 − x1 2 (2.28) Para resolver la integral anterior, conviene dividir numerador y denominador por vr2 t20 y hacer un cambio de variables: x2 x1 x2 dx = vr t0 x2 + vr2 t20 u2 u1 u2 du, 1 + u2 (2.29) donde x1 x ⇒ dx = vr t0 du y u1 = , vr t0 vr t0 u= u2 = x2 . vr t0 (2.30) Ahora bien, como u2 1 =1− , 2 1+u 1 + u2 (2.31) se tiene vr t0 u2 u1 u2 du = vr t0 1 + u2 u2 u1 du − u2 u1 1 du 1 + u2 = vr t0 (u − arctan u)uu21 . (2.32) y reemplazando u por la variable original x/vr t0 , se obtiene x2 x1 x2 x2 x dx = x − vr t0 arctan . x2 + vr2 t20 vr t0 x1 (2.33) Finalmente, reemplazando el valor de esta integral en la ecuación para el valor medio de sin2 θ, ecuación (2.28), se obtiene Septiembre de 2007 Impedancia elástica - Danilo Velis 23 2.3. DERIVACIÓN DE LA ECUACIÓN (2.2) 1 sin θ = x2 − x1 2 vi vr 2 x x − vr t0 arctan vr t0 x2 , (2.34) x1 que es igual a la expresión (2.2) del trabajo de Connolly. Cabe aclarar que el resultado final se obtiene evaluando la expresión entre corchetes para x = x2 y restándole la misma expresión para x = x1 . Ahora bien, siguiendo a Connolly, las funciones de mute se calculan de la siguiente manera: 1. Dadas las velocidades cuadráticas medias e interválicas (Figura A2, panel de la izquierda), mediante la fórmula (2.1) del trabajo de Connolly se puede calcular, por ejemplo, el valor “externo” de la función de mute para θ = 35o (esto para el caso de un far-offset o “high-angle” stack, sino se usará un valor menor). Es decir, dado θ (y las velocidades) hay que hallar x = x2 a partir de la ecuación (2.1) del trabajo de Connolly para cada t0 . 2. El valor “interno” de la función de mute, x1 , se calcula a continuación utilizando la expresión que nos da el valor medio del sin2 θ que acabamos de hallar, que en el ejemplo de la Figura A2 es igual a 25o . Es decir, dado θ y x2 , hay que hallar x1 a partir de la ecuación (2.2) del trabajo de Connolly. En otras palabras, se fija el ángulo máximo para el stack (en el ejemplo 35o ), y haciendo uso de la fórmula (2.1) del trabajo de Connolly se encuentra el offset externo, x = x2 , para cada tiempo. De esta forma queda construida la función de mute externa (que luego puede ser suavizada). La función de mute interna se puede construir ahora haciendo uso de la fórmula (2.2), también para cada tiempo, una vez fijado el ángulo medio (25o en el ejemplo). Alternativamente, se puede fijar primero el mute interno con la (2.1), y luego el externo a partir de la (2.2) del trabajo de Connolly. El procedimiento descripto permite construir un angle stack utilizando software convencional, habiendo previamente definido las funciones de mute correspondientes. El stack resultante será asignado al valor medio del ángulo. Esta estrategia apunta a que en el stack siempre se estén considerando aquellos valores de amplitud para las cuales los ángulos de incidencia se encuentren en el rango especificado. Como además la amplitud es lineal con Septiembre de 2007 Impedancia elástica - Danilo Velis 24 2.3. DERIVACIÓN DE LA ECUACIÓN (2.2) sin2 θ, el valor medio de la amplitud se corresponderá con el ángulo dado por la fórmula (2.2) del trabajo de Connolly, previamente fijado por el usuario (25o en el ejemplo). No obstante, el método basado en la regresión (“weighted stack”) es el método más apropiado para la construcción de los angle stacks, puesto que permite mayor flexibilidad a la hora de seleccionar los ángulos para los cuales los stacks serán asignados. Septiembre de 2007 Impedancia elástica - Danilo Velis BIBLIOGRAFÍA 25 Bibliografı́a [Aki and Richards, 2002] Aki, K. and P. Richards, 2002, Quantitative seismology: University Science Books, 2nd edition. [Castagna et al., 1985] Castagna, J., M. Batzle, and R. Eastwood, 1985, Relationships between compressional and shear-wave velocities in clastic silicate rocks: Geophysics, 50, 551–570. [Connolly, 1999] Connolly, P., 1999, Elastic impedance: The Leading Edge, 18, 438–452. [Dix, 1955] Dix, C., 1955, Seismic velocities from surface measurements: Geophysics, 20, 68–86. [Shuey, 1985] Shuey, R., 1985, A simplification of the Zoeppritz equations: Geophysics, 50, 609–614. Septiembre de 2007 Impedancia elástica - Danilo Velis Lima 575 8th & 9th Floor / C1073AAK / Buenos Aires, Argentina Phone: 5411 4381 9376 / Fax: 5411 4372 9376 [email protected] www.dataseismic.com.ar