Aplicaciones de Leyes de Newton
Anuncio

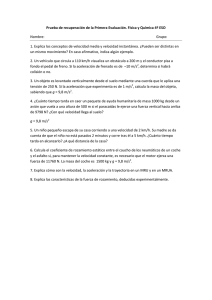
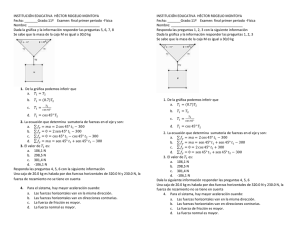
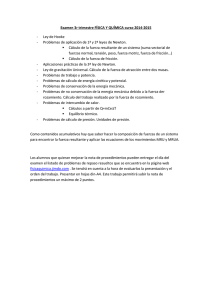
Capitulo Nº 5: [S.Z.F.Y. 5] APLICACIONES DE LAS LEYES DE NEWTON 5-1 Pasos a seguir para resolver problemas de Dinámica a) Comprender la situación física planteada en el enunciado, leyéndolo cuidadosamente. b) Identificar los cuerpos cuya masa no se desprecia. c) Representar todas las fuerzas que actúan sobre los mismos. d) Representar (si se conoce o puede preverse) el vector aceleración (recordar que no es una fuerza). e) Escoger y dibujar los ejes coordenados “x” e “y” y representar el sentido positivo de cada uno. Es conveniente seleccionar la dirección y sentido de uno de los ejes, en la dirección y sentido de la aceleración (así cuando se aplique la segunda Ley de Newton las componentes de la aceleración serán positivas). Si la componente de la aceleración es nula, el sentido adoptado para el eje es arbitrario. f) Calcular las componentes de todas las fuerzas en las direcciones de ambos ejes (para esto se utilizan las funciones trigonométricas seno y coseno) g) Plantear la segunda Ley de Newton para cada cuerpo, en las direcciones elegidas: F = m . a Fx = m . ax Fy = m . ay h) Comprobar que se dispone de un sistema de n ecuaciones con n incógnitas, y calcular la/s incógnita/s resolviendo matemáticamente el sistema. i) Verificar la validez de las soluciones halladas. Ejemplo de resolución de un problema: En el sistema de la Figura 5-1, el bloque A de masa mA se ubica sobre el plano inclinado sin roce, que forma un ángulo con respecto a la horizontal. La polea por donde cuelga el bloque B de masa mB conectado a A, es de masa despreciable y la cuerda se considera inextensible y también de masa despreciable. Calcular la aceleración del sistema. A B Figura 5-1 Resolución: a) Se trata de un sistema físico que podría estar en equilibrio, en reposo o moviéndose ambos cuerpos con velocidades constantes, o bien estar acelerados. Por acción de la atracción gravitatoria, el cuero B puede caer, arrastrando hacia arriba al cuerpo A sobre el plano inclinado, o bien, el cuerpo A cae sobre el plano y el cuerpo B asciende. Que ocurra cualquiera de estas situaciones dependerá, como veremos, de las masas de los cuerpos y del ángulo del plano inclinado. b) Identificar los cuerpos cuya masa no se desprecia: Cuerpos A y B Capítulo N°5 1 c) Representar todas las fuerzas que actúan sobre los mismos, realizando el DCL de cada uno: d) Representar (si se conoce o puede preverse) el vector aceleración (recordar que no es una fuerza). De los casos que hemos considerado posibles, suponemos uno de ellos (esto es arbitrario en este caso) que el sistema se acelera de modo que A asciende y B desciende. aA T2 T1 N aB PB PA e) Escoger y dibujar los ejes coordenados “x” e “y” y representar el sentido positivo de cada uno. De acuerdo con la aceleración que suponemos adquiere el sistema, escogemos el eje “x” en la dirección y sentido de la aceleración para el cuerpo A y el eje “y” para el cuerpo B. De este modo, ambas aceleraciones tienen una única componente y ésta es positiva. De este modo, la elección del sentido positivo del eje “y” perpendicular al eje “x” en el Bloque A es indistinto, porque no hay componente de la aceleración en esa dirección. aA axA ≠ 0 ayA = 0 aA T2 y N axB = 0 aB ayB ≠ 0 x T1 PB y PA f) Calcular las componentes de todas las fuerzas en las direcciones de ambos ejes. En este caso, sólo es necesario descomponerla fuerza PA: PAX = mB . g . cos PAy = mA . g . sen aAx y N mA . g . sen x T2 T1 mA . g . cos mB . g mA . g ayB y g) Plantear la segunda Ley de Newton para cada cuerpo: Para el Bloque A: Fy = mA . aAy Fx = mA . aAX Capítulo N°5 → → N - mA . g . cos = 0 T1 - mA . g . sen = mA .aAX 2 (1) (2) Para el Bloque B: Fy = mB . aBy mB . g – T2 = mB .aBy (3) → h) Comprobar que se dispone de un sistema de n ecuaciones con n incógnitas, y calcular la/s incógnita/s resolviendo matemáticamente el sistema. T1 = T2 = T ya que la masa de la polea se consideró despreciable. ax = ay = a si se considera que la cuerda es de masa despreciable e inextensible. Con estas consideraciones, la ecuación (2) queda: T = mA . g . sen + mA .a Y la (3) queda: T = mB .g - mB . a En este caso, tenemos entonces tres ecuaciones, en las que se desconocen N, T y a. Como se solicita sólo la aceleración, la ecuación (1) no aporta información y debemos resolver el sistema de las dos ecuaciones anteriores: mA . g . sen + mA .a = mB .g - mB . a mA .a + mB . a = mB .g - mA . g . sen de donde obtenemos finalmente: a= g . (mB - mA . sen ) mA + mB i) Verificar la validez de las soluciones halladas. Analizando la expresión anterior, vemos que: si mB > mA . senentonces a > 0 y el sistema se acelerará según lo supuesto. si mB < mA . senentonces a < 0 y el sistema se acelerará en el sentido opuesto al supuesto. si mB = mA . senentonces a = 0 y el sistema no tiene aceleración, en cuyo caso puede estar en reposo o bien moviéndose con velocidad constante en cualquiera de los dos sentidos. También vemos que cuanto mayor es la inercia total del sistema (mA + mB), menor es la aceleración que éste adquiere. 5-2 Fuerzas de rozamiento Aunque la naturaleza de la interacción responsable de las fuerzas de rozamiento no es bien conocida, parece que son debidas a interacciones entre las moléculas de ambos cuerpos en los lugares en los que las superficies están en contacto. Las fuerzas de rozamiento pueden ser: Fuerza de rozamiento estática (fre): Se origina cuando un cuerpo en reposo sobre un plano se le aplica una fuerza para intentar ponerlo en movimiento (aunque no llegue a deslizar). El sentido de esta fuerza de rozamiento es tal que se opone al movimiento relativo entre las superficies de contacto. Fuerza de rozamiento cinética (frc): Se origina cuando un cuerpo desliza, por ejemplo, sobre un plano. De las mediciones experimentales se deduce que: La fuerza de rozamiento siempre se opone al deslizamiento de los puntos del objeto en contacto con la superficie de apoyo respecto de la misma. Es paralela al plano. Capítulo N°5 3 Depende da la naturaleza y estado de las superficies en contacto. Es proporcional a la fuerza normal. Es independiente de la velocidad del cuerpo, mientras ésta no sea muy elevada. Es independiente del área (aparente) de las superficies en contacto. FUERZA DE ROZAMIENTO CINÉTICA La fuerza de rozamiento cinética es ejercida por el plano sobre los cuerpos y es la responsable de que éstos disminuyan su velocidad si se dejan deslizar libremente. De aquí (primera ley de Newton) que si queremos que un cuerpo que desliza sobre un plano no disminuya su velocidad, hemos de empujarlo (aplicar una fuerza). Como se puede observar tiene un valor constante y depende del valor de la normal y del coeficiente de rozamiento. frc = cN Donde: frc: es la fuerza de rozamiento cinética. c: Coeficiente de rozamiento cinetico. Número sin unidades. Depende de la naturaleza de las superficies y de su estado. N: Fuerza normal o acción del plano. FUERZA DE ROZAMIENTO ESTÁTICA La fuerza de rozamiento estática aparece cuando aplicamos una fuerza a un cuerpo para intentar que éste deslice. Si la fuerza aplicada está por debajo de determinado valor no se iniciará el deslizamiento, debido a que la fuerza de rozamiento estática equilibra la fuerza aplicada. Si aumentamos el valor de la fuerza aplicada, aumenta en la misma relación que el valor de la fuerza de rozamiento estática y el cuerpo permanece en reposo. Si seguimos aumentando la fuerza llegará un momento que el cuerpo comienza a deslizar. La fuerza de rozamiento estática no puede crecer indefinidamente. Su valor máximo viene dado por la expresión: fre = e . N Donde: Fre: es la fuerza de rozamiento estática. e: es el coeficiente de rozamiento estático. Depende de la naturaleza de las superficies en contacto y de su estado. Tiene un valor igual o superior a c. N: Fuerza normal o acción del plano Una vez que la fuerza aplicada es superior al valor máximo que puede alcanzar la fuerza de rozamiento estática, el cuerpo comienza a deslizar y aparece la fuerza de rozamiento cinética. Ejemplos de coeficientes de rozamiento: Materiales en contacto Acero - acero Aluminio - acero Cobre - acero e c 0,74 0,57 0,61 0,47 0,53 0,36 Las fuerzas de fricción también pueden actuar cuando no hay movimiento relativo. Si tratamos de deslizar por el piso un bloque, tal vez no se mueva porque el piso ejerce una fuerza de fricción igual y opuesta sobre el bloque. En la Figura 5-2 a, un bloque está en reposo, en equilibrio, bajo la acción de su peso y la fuerza normal hacia arriba, la fuerza normal es igual en magnitud al peso y ejercida por el piso sobre el bloque. En la Figura 5-2 b, aplicamos una fuerza F y gradualmente aumentamos la fuerza. Al principio, el bloque no se mueve porque, al aumentar F, la fuerza de fricción estática fre también aumenta (su magnitud se mantiene igual a F). Capítulo N°5 4 En la Figura 5-2 c, muestra las fuerzas cuando F tiene un valor crítico. Si F excede dicho valor, el bloque ya no estará en equilibrio. Para un par de superficies dado, el valor máximo de fre depende de la fuerza normal. Los experimentos han revelado que, en muchos casos, ese valor máximo, llamado (fre MAX, es aproximadamente proporcional a N; llamamos coeficiente de fricción estática al factor de proporcionalidad e. En la Figura 5-2 d, cuando se inicia el deslizamiento del bloque, la fuerza de fricción suele disminuir; es más fácil mantener el bloque en movimiento que ponerlo en movimiento. Por lo tanto, el coeficiente de fricción cinética suele ser menor que el de fricción estática para un par de superficies dado. Si comenzamos con una fuerza aplicada igual a cero y aumentamos gradualmente la misma, la fuerza de fricción varía un poco, como se muestra en la Figura 5-2 e. a) b) N c) N d) F F fre fre Mayor fuerza aplicada, el bloque a punto de deslizarse. Fricción estática fre = e . N Fuerza aplicada de pequeña magnitud, el bloque permanecerá en reposo. fre < e . N F frc P P P No se aplica fuerza, el bloque está en reposo. Sin fricción. fre =0 N N P El bloque se desliza con rapidez constante. Fricción cinética Frc =c . N fr e) fre MAX. frc F Bloque en reposo: Bloque en movimiento: La fricción estática es igual a la fuerza aplicada La fricción cinética es constante Figura 5-2 5-3 Dinámica del movimiento Circular En el movimiento circular uniforme vimos que cuando una partícula se mueve en un círculo con rapidez constante, su aceleración siempre es hacia el centro del círculo (perpendicular a la velocidad instantánea). La magnitud aRAD de la aceleración es constante y está dada en términos de la rapidez v y el radio R del círculo por aRAD = v2/R El subíndice “rad” nos recuerda que en cada punto la aceleración siempre es radial hacia el centro del círculo, perpendicular a la velocidad instantánea. El movimiento circular uniforme, como todos los movimientos de una partícula, se rige por la segunda ley de Newton. Para hacer que la Capítulo N°5 5 v partícula acelere hacia el centro del círculo, la fuerza neta sobre la partícula debe estar dirigida siempre hacia el centro (Figura 5-3). La magnitud de la aceleración es constante, así que la magnitud de la fuerza neta también debe ser constante. Si deja de actuar lafuerza neta hacia adentro, la partícula saldrá disparada en una línea recta tangente al círculo La magnitud de la aceleración radial está dada por aRAD = 2 V /R, así que la magnitud de la fuerza neta sobre una partícula de masa m, es: Fneta = m . aRAD = m . v2/R a a v F F a F v Figura 5-3 5-4 Ejemplos de problemas de Dinámica del movimiento Circular a) Péndulo cónico: Se llama péndulo cónico a un cuerpo de masa m sujeto al extremo de una cuerda de longitud L, que describe una trayectoria circular en el plano horizontal, generando una superficie cónica (Figura 5-4). Fy = 0 T cos - m .g = 0 T = m .g/cos Fx = m . aRAD T . sen = m v2/R [m .g/cos q. sen = m v2/R v2 = R . g . tg y T . cos L R x T . sen aRAD m m .g Figura 5-4 b) Vuelta a una curva plana: aRAD Fy = 0 N - m .g = 0 → N = m .g Fr = . N = . m . g Fx = m . aRAD Fr = m . aRAD . m . g = m v2/R v MAX = . R . g . g . R = v2 → R Fr m .g y c) Curva Peraltada: Fy = 0 N cos - m .g = 0 → N = m .g/ cos N x Fx = m . aRAD N . sen = m . aRAD [m .g/ cos . cos = m v2/R v2MAX= g . tg . R m.g R = 150 m y aRAD x Capítulo N°5 N 6 N . sen N . cos m.g d) Movimiento circular vertical (MCUV): A PUNTO A: Fy = m . aRADA T + m . g = m . vA2/R T T m.g T aRADC vC B m.g T C x aTGC m.g y vD PUNTO D: Fx = m . aRADD T + m . g . sen = m . vD2/R m.g.sen aRADC x Capítulo N°5 D m.g PUNTO B: Fy = m . aRADB T - m . g = m . vB2/R PUNTO C: Fx = m . aRADC T = m . vC2/R Fy = m . aTGC m . g = m . aTGC aTGC = g m.g.sen 7 D T m.g m.g.cos y aTGD m.g.cos m.g C