Silla de ruedas de ascenso vertical
Anuncio

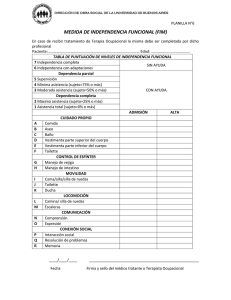
Montevideo, 30 de agosto de 2008 “Silla de ruedas de ascenso vertical” Resumen. En lo particular la propuesta surge de las dificultades que encuentra un docente de esta Institución para su rehabilitación al no tener movilidad en sus miembros inferiores. Existen en el mercado algunas propuestas pero no son viables por diferentes motivos entre ellos el costo y la pasividad que genera. El objetivo central: Disminuir las dificultades de recuperación en un 30% de personas con capacidades diferentes en sus miembros inferiores por falta de aparatos de recuperación. Frente a esto nuestro desafío es crear una solución que sea interactiva con el usuario ya que debemos recordar que no presenta dificultades en sus miembros superiores, Luego de varias consultas y recopilación de información sobre el usuario y lo que ofrece el mercado es muy amplio nuestra alternativa es ensayar un prototipo a escala de una silla de ruedas cuya elevación sea mediante un sistema hidráulico (con bomba manual) en la primera fase, posteriormente con la asistencia técnicos mecánicos ajustar los detalles constructivos, para en la segunda fase pasar a construir un prototipo real. La metodología a emplear entre los integrantes es de l trabajo en equipo y una metodología de investigación que valide las propuestas que es muy similar al método científico. Introducción: En este trabajo se presenta un protocolo de diseño electro mecánico a partir del cual se fabrico un prototipo de silla de ruedas que brinda a las personas con discapacidades físicas mayor confort, versatilidad y la posibilidad de realizar movimientos terapéuticos como colocarse de pie sin dejar su silla de ruedas. Un tratamiento adecuado para la rehabilitación de enfermedades con secuelas motoras implica terapias constantes, para las cuales el paciente debe ser trasladado constantemente de su silla de ruedas a camillas o a dispositivos mecánicos que le ayudan a ponerse de pie por pocos minutos. La silla de ruedas supone una solución a las limitaciones de desplazamiento que tienen las personas con discapacidades físicas. Para los usuarios de la silla de ruedas este es el medio por el cual pueden movilizarse y un dispositivo en el cual pasan la mayor parte del día, este elemento permitirá al usuario reintegrarse a su vida laboral y social. La silla de ruedas ha de cumplir, inicialmente un doble requerimiento: por un lado debe asegurarse estabilidad y comodidad al usuario; y por otro, debe permitir al individuo un fácil desplazamiento. De acuerdo a los diagnósticos médicos y terapéuticos el lograr estar de pie, así sea por pocos minutos al día, aporta significativos avances en los procesos de rehabilitación de pacientes con discapacidad en miembros inferiores. La calidad de vida del individuo mejora notablemente al realizar terapias que le permitan ponerse en posición vertical durante un periodo de tiempo determinado durante el tratamiento, ya que esta acción ayuda a la liberación de presión en zonas puntuales , a la normalización de las funciones de riñón, vejiga, al mejoramiento del sistema digestivo, al mantenimiento de la densidad ósea, mejoramiento de la flexibilidad y disminución de espasmos musculares, a mejorar la circulación y la oxigenación sanguínea. La silla diseñada y presentada en este trabajo, tiene como finalidad ayudar al paciente en sus terapias de rehabilitación o en sus ejercicios de mantenimiento y fisioterapias, ya que le permite cambiar su postura colocándolo de pie durante el tiempo que el tratamiento requiera o simplemente por necesidad del mismo paciente. El diseño electromecánico realizado, permite que el paciente con la ayuda de su silla de ruedas tenga un movimiento a voluntad mediante mando manual. El realizar el diseño a partir del análisis finito de la estructura, permitió obtener una silla liviana pero resistente. Adicionalmente, la silla ayuda al paciente en sus terapias de rehabilitación o en sus ejercicios de mantenimiento y fisioterapias, porque le permite cambiar su postura y lo coloca de pie por un periodo de tiempo determinado según las necesidades del caso optimizando el tratamiento y mejorando la calidad de vida del paciente El diseño del prototipo se llevo acabo en el instituto tecnológico utilizando métodos de investigación similares a los que se utilizan en el método científico. Problema: Elevar a las personas con capacidades diferentes en sus miembros inferiores desde su posición de sentados hasta incorporarse en una posición de 75º a 85º con respecto al piso. Para realizar desplazamientos sobre planos horizontales, sin perder centro de gravedad (equilibrio, estabilidad). Consideraciones biomecánicas: El logro de una independencia optima de desplazamiento, constituye una paso vital en la rehabilitación de un individuo físicamente discapacitado. Para una persona incapaz de alcanzar y mantener una marcha segura, satisfactoria y eficiente, la silla de ruedas adecuada presenta el medio necesario para acceder a las oportunidades sociales, educativas, vocacionales y recreativas que forman parte de un estilo de vida productivo y gratificante. El diseño de una silla de ruedas tiene como objetivo brindarle al usuario máxima funcionalidad, comodidad y movilidad. Para cumplir con este objetivo la silla debe ajustarse al individuo que la va a utilizar y no el individuo amoldarse a la silla. La selección y posterior utilización de una silla de ruedas no apropiada, puede resultar incomoda, causando problemas adicionales en la condición del paciente debido al esfuerzo continuo por modificar su postura. Medidas necesarias para el diseño: La independencia de una persona con una discapacidad física en una silla de ruedas , puede facilitarse o empeorarse como resultado de una toma de medidas correcta o no . Cuando se diseña una silla de ruedas es necesario especificar varios parámetros, como se observa en la figura adjunta(fig.1). el ancho del asiento(a); la altura del asiento(b); la profundidad del asiento(c); la altura del respaldo(d); y la altura de los apoya brazos(e). Además se debe tener en cuenta que la silla de ruedas es una extensión del individuo y que cada individuo tiene sus propias necesidades que deben ser tomadas en cuenta a la hora del diseño. Postura en la silla de ruedas: La capacidad de funcionar de manera eficaz y realizar diferentes actividades depende de la habilidad para adoptar la postura apropiada. Una silla de ruedas únicamente resulta útil para su usuario si le proporciona comodidad y una base de asiento estable que le permita sentarse erguido en una posición sentada simétrica, conseguir la máxima capacidad funcional con el mínimo gasto de energía y reducir la presión que soporta en glúteos y muslos. El tamaño del asiento asegura la estabilidad del paciente optimizando la zona del cuerpo del usuario en contacto con la base del soporte. También proyecta un alivio de la presión, al distribuir de manera uniforme el peso del usuario en la mayor superficie posible. El asiento debe ser firme y estar nivelado. Una tapicería de asiento hundida provocara que el usuario se siente de manera asimétrica haciendo que los muslos y rodillas se empujen, produciendo un exceso de presión y rozamiento. Cuando se mantiene una buena postura el ángulo de la cadera (entre los muslos y el tronco) es fundamental ya que determinara la estabilidad de la pelvis. Se considera que el ángulo de 90º es el mas adecuado para las actividades cotidianas, la mejor forma de obtener este ángulo es utilizando un cojín adaptado a la forma humana, mas bajo por detrás para acomodar la forma del glúteo mayor. Una vez establecido el ángulo de la cadera en 90º , la mayoría de las personas discapacitadas se sentirán cómodas si el ángulo de las rodillas es también de 90º . Este mismo ángulo se debe mantener también en los tobillos. Por lo tanto desde el punto de vista ergonómico los reposapiés deberían estar a 90º, sin embargo en adultos, normalmente no se da, porque de esta forma las plataformas del posapies impiden el libre giro de las ruedas delanteras. En sillas deportivas con ruedas delanteras mas pequeñas el ángulo puede ser unos 85º. En sillas normales es algo inferior pero siempre tendiendo a aproximarse a los 90º. En usuarios con piernas largas el ángulo del posapies debera ser inferior para que las plataformas no entorpezcan actividades como subir un anden. La altura a la que esten colocadas las plataformas de los posapies también es importante. Si están demasiado bajas o el asiento demasiado alto, las rodillas del usuario estaran mas bajas que sus caderas y de esta forma el usuario tendera a deslizarse en la silla dificultando la propulsión y aumentando el rozamiento en los glúteos mayores. Si las plataformas estan demasiado altas o el asiento demasiado bajo, las rodillas estaran mas altas que las caderas aumentando la presion sobre los glúteos. Objetivo específicos: Articular la silla para la elevación. Mantener el centro de gravedad. Desplazar las articulaciones sin conflictos. Optimizar los aspectos estéticos y ergonómicos. Generar valor agregado. Aplicar normas técnicas nacionales e internacionales de seguridad, sobre elementos del sistema a incorporar. Reducir costos de mantenimiento. Hipótesis: Articular la silla y obtener desplazamientos por sistemas mecánicos o electromecánicos. Desplazamientos: Por medio de un motor eléctrico con tornillo elevador. Sistema neumático o electro-neumático. Con compresor. Sistema electro-hidráulico o hidráulico (con bomba manual). Si bien brinda la posibilidad de participar activamente reduce los costos de la fuente. Métodos y procedimientos: La recolección de datos en nuestro país no existe relevamiento de la cantidad de personas que tienen esta capacidad diferente. Si en cambio hemos querido obtener una silla de las prestaciones mencionadas y no hemos encontrado si con prestaciones para personas con un grado de dificultad mayor, inclusive hemos tenido la posibilidad de obtener información por internet de foros y congresos en la región presentando modelos estéticos y complejos de sillas elevadoras. Método utilizado es el de análisis de los datos recogidos en las experiencias de los diferentes sistemas planteados en la hipótesis, para finalmente discutir los resultados y proceder a la selección del más apropiado según los siguientes criterios: 1) menos costoso 2) más interactivo con el usuario. METODOLOGÍA Situación problema (entorno en donde se encuentra el problema). Búsqueda de información (comienzo de un eje facilitador que atraviesa todo el transcurso del proyecto brindando un apoyo permanente). Definir el problema (lo que obstruye el funcionamiento, variables dependientes o independientes). Objetivo (cual es el cambio deseado en la situación planteada). Objetivos específicos (aquellos que apuntan a disolver el problema o disminuir su dificultad). Hipótesis (posibles soluciones analizarlas y experimentar sobre las más concesuadas sin descartar las restantes o tener que replantear nuevas). Experimentar o ensayar (poner a prueba en el laboratorio las diferentes soluciones propuestas observar y anotar los resultados para posteriormente evaluarlos). Discusión (selección de a mejor propuesta, replanteo del problema o de la/s hipótesis, en muchos casos es una retroalimentación muy positiva aprendiendo a sobrellevar dificultades). Prototipo llevar a la realidad el objeto tecnológico a escala o tamaño real, cumpliendo las etapas de diseño planificación, construcción y evaluación de aspectos técnicos. Evaluación final (contrastar con el objetivo, si lo satisface y en que grado). Por medio de un motor eléctrico con tornillo elevador. Objetivo: Mover una tuerca ligada a un eje roscado en ambos sentidos mediante un motor eléctrico de 12v. Materiales mecánicos. Eje roscado y tuerca. Materiales eléctricos: Fuente de 12v., moto-reductor (de limpia parabrisas de auto), botonera de cruce y botonera con pulsador N.A., pilotos, cables. Ligar el moto-reductor al eje roscado con tuerca. Conectar positivo y negativo desde la fuente a la botonera de cruce. Conectar positivo y negativo desde la botonera con pulsador N.A. al piloto. Conectar positivo y negativo desde el piloto hacia el moto-reductor. Conectar a la red la fuente y prender. Se observo el movimiento de la tuerca en ambos sentidos al cambiar la posición del conmutador de cruce y presionar el pulsador N.A. CONCLUSIÓN: Es un sistema efectivo pero requiere de una fuente auxiliar de energía eléctrica (batería) que aumenta considerablemente su peso y el eje roscado queda expuesto perjudicando el aspecto estético. Sistema neumático o electro-neumático (con compresor). Objetivo: Mover un actuador de efecto doble en positivo y negativo lentamente con mando eléctrico (seleccionado por la reducción de cañería y flexibilidad de los conductores eléctricos, frente a los movimientos del sistema). Materiales neumáticos: Compresor, unidad distribuidora con FRL, electro-válvula 2/4, actudor efecto doble, válvulas reguladoras de caudal unidireccionales, caños. Materiales eléctricos: Fuente de 24v., botonera con pulsadores N.A., pilotos, cables. Procedimiento: Conectar el compresor a la red y prender. Conectar unidad de distribución al compresor. Conectar la electro-válvula a la unidad de distribución. Conectar las válvulas reguladoras de caudal unidireccionales, una a cada vía de salida de la electro-válvula. Conectar positivo y negativo desde la fuente a la botonera. Conectar positivo y negativo desde la botonera al piloto. Conectar positivo y negativo desde el piloto hacia electro-válvula. Conectar a la red la fuente y prender. Se observo el movimiento del actuador al presionar una botonera por vez prendiéndose el piloto correspondiente en cada acción, lento de negativo a positivo y rápido de positivo a negativo. Se ajusto el regulador correspondiente y se logro los movimientos muy similares. CONCLUSIÓN: es un sistema limpio, controlable, compresible y de una precisión relativa. Requiere además de una fuente auxiliar de energía eléctrica (batería)y moto-compresor lo que aumenta considerablemente su peso. Sistema electro-hidráulico o hidráulico (con bomba manual). Objetivo: Mover un actuador de efecto doble en positivo y negativo lentamente con mando eléctrico (seleccionado por la reducción de cañería flexibles y aprovechar la flexibilidad de los conductores eléctricos, frente a los movimientos del sistema). Materiales hidráulico: Moto-bomba, unidad distribuidora, electro-válvula ¾ centro cerrado, actudor efecto doble, válvulas reguladoras de caudal unidireccionales, mangueras. Materiales eléctricos: Fuente de 24v., botonera con pulsadores N.A., pilotos, cables. Procedimiento: Conectar la moto-bomba a la red y prender. Conectar unidad de distribución a la motobomba. Conectar la electro-válvula a la unidad de distribución. Conectar la electro-válvula al retorno del tanque. Conectar las válvulas reguladoras de caudal unidireccionales, una a cada vía de salida de la electro-válvula. Conectar positivo y negativo desde la fuente a la botonera. Conectar positivo y negativo desde la botonera al piloto. Conectar positivo y negativo desde el piloto hacia electro-válvula. Conectar a la red la fuente y prender. Se observo que al presionar el pulsador N.A. el movimiento del actuador es lento de negativo a positivo y de igual forma en sentido inverso prendiéndose el piloto correspondiente en cada acción, Se lograron movimientos muy similares al ejercicio anterior. CONCLUSIÓN: es un sistema sucio, controlable, incompresible, de una buena precisión. Si bien requiere de una fuente auxiliar de energía eléctrica (batería) y una moto-bomba que aumenta considerablemente su peso; todo esto se puede surtir por una bomba manual lo que generaría una participación más activa del usuario que no presenta dificultades ya que sus miembros superiores están en condiciones normales. DISCUSIÓN: Luego de analizar las conclusiones sobre ventajas y desventajas del comportamiento de cada uno de los sistemas en los diferentes ensayos. Consideramos por unanimidad en nuestro equipo que la opción más favorable es la del uso de un actuador hidráulico con bomba manual DISEÑO PLANIFICACIÓN y CONSTRUCCIÓN. De un prototipo de ensayo. Actualmente estamos en la etapa preliminar del estudio en un prototipo de ensayo a escala sobre la estructura del objeto y el funcionamiento del sistema hidráulico para finalmente pasar al diseño final. Diseño Un sólido tridimensional a escala ¼ con referencial al tamaño real, con corredera para el asiento y soporte para el actudor. Planificación De recursos humanos, maquinaria y materiales. Construcción Habilidades y destrezas personales de los integrantes del equipo (crecimiento de todos compartiendo nuestras fortalezas y debilidades, combatiendo las amenazas y aprovechando las oportunidades. REFERENCIAS: -Bergen, A.F.,the wheelchair and other adapted equipement, Valhallia Rehabilitación Public Ltda. -Brubaker , C.E., whellchair prescriptions . p.p.g 19- -26. 1986. -www.imagina.org/archivos /biomecanica.htm. Consideraciones biomecánicas en la silla de ruedas manual. -8º Congreso iberoamericano de ingenieria mecánica(Cusco, 23 al 25 de Octubre de 2007).