Transformación_ Tensiones - U
Anuncio

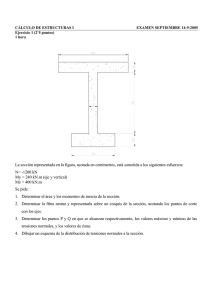
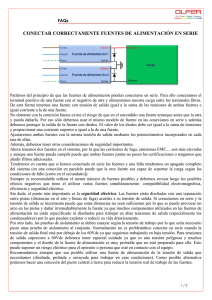
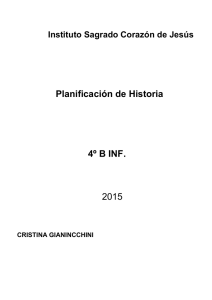
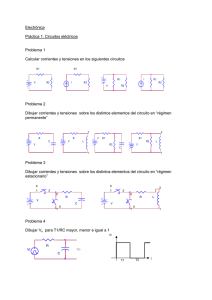
Transformación de Tensiones y Deformaciones A-Transformación de Tensiones Si el estado de tensiones en un cuerpo es el mismo en todos sus puntos, se dice que el cuerpo tiene un estado de tensión uniforme. El objetivo de esta sección es el de derivar expresiones para los componentes del tensor de tensiones que actúan en un plano arbitrario que pasa por el cuerpo o sólido en estudio, si los componentes de del tensor de tensiones referidos al sistema oxyz son conocidos. Para tal efecto, considerar un estado plano o bidimensional de tensiones (Fig. 1) y • τxy y´ x´ • α σxx x α • • τyx σyy Estado plano de tensiones τxz = τyz = 0 σzz = 0 Longitud unitaria en la dirección z Equilibrio de momento τxy = τyx En general, para dos mutuamente perpendiculares τ x , y , = τ y , x, Fig.1. Estado plano de tensiones Considerar sumatoria de fuerzas en la dirección x (Fig. 2) y y´ τxy Αcosα α Α py px x´ Αsinα σxx α p py τyx px x τ x, y, σyy Fig. 2. Equilibrio considerando un plano arbitrario 1 σ x , x, ΣFx = −σ x A cosα − τ yx A sin α + σ x, A cos α − τ x, y , A sin α = 0 (1a) − σ x A cos α − τ yx A sin α + σ x, cos α − τ x, y, sin α A = 0 (1b) − σ x A cos α − τ yx A sin α + p x A = 0 (1c) p x = σ x cos α + τ yx sin α (1d) [ ] En forma análoga al caso anterior, equilibrio en la dirección y entrega el siguiente resultado p y = σ y sin α + τ xy cos α (2) El vector de tensión σ x, puede encontrarse proyectando las tensiones px y py en la dirección x´. Para tal efecto, considerar px x ⋅ x , + p y y ⋅ x, = p ⋅ x, ⇒ ⇒ σ x , = p x cos α + p y sin α (3a) y , = p /⋅ x , σ x , = p ⋅ x , p x x + p y y = p /⋅ x , σ x, x, + τ x, y , Por lo tanto, reemplazando la Ec. 1d en la Ec. 3a se obtiene σ x , = σ x cos 2 α + σ y sin 2 α + 2τ xy sin α cos α (3b) En forma similar al caso anterior, se puede encontrar una expresión para τ x , y , en función de σx, σy, τxy y el ángulo α. τ x, y , = − p x sin α + p y cos α ( ) τ x, y , = τ xy cos 2 α − sin 2 α + (σ y − σ x )sin α cos α (4a) (4b) Para encontrar el valor de la tensión σ y , , sólo se debe sustituir el valor del ángulo α por (α + π/2) en la expresión de σ x, . Por lo tanto, 2 σ y , = σ x sin 2 α + σ y cos 2 α − 2τ yx sin α cosα (5) donde las siguientes identidades trigonométricas fueron utilizadas: sin(α + π/2) = cos α y cos(α + π/2) = -sinα. Las ecuaciones que entregan los valores de los componentes del tensor de tensiones referidos a un sistema de coordenadas prima son las ecuaciones de transformación de tensiones, conociendo los valores de σx, σy, τxy y el ángulo α. Observación: Notar que σx + σy = σ x , + σ y , = c (constante). Utilizando las siguientes identidades trigonométricas en las ecuaciones precedentes: sin2 α = 1/2(1− cos2α); sin2α = 2sinαcosα y cos2α = 1/2(1 + cos2α), las ecuaciones de transformación de tensiones pueden ser escritas como sigue σ x +σ y σ x, = 2 σ x +σ y σ y , = 2 σ y −σ x τ x, y , = 2 σ x −σ y + 2 σ x −σ y − 2 cos 2α + τ xy sin 2α (6a) cos 2α − τ xy sin 2α (6b) sin 2α + τ xy cos 2α (6c) Para obtener los planos en que se producen la máxima y mínima tensión normal, se impone la condición tan 2α = dσ x , dα = 0 → − (σ x − σ y )sin 2α + 2τ xy cos 2α = 0 , lo que implica 2τ xy (7) σ x −σ y La ecuación anterior tiene dos raíces (2α) que difieren en 180º. Por lo tanto, los valores de α difieren en 90º, lo que implica que los planos donde actúan la máxima y mínima tensión normal son mutuamente perpendiculares. Observación: Si se impone la condición τ x , y , = 0 ⇒ tan 2α = 2τ xy σ x −σ y , es decir, los planos donde la tensión de corte o tangencial es nula se denominan planos principales. 3 Para obtener los planos en que se produce la máxima tensión de corte, se impone la condición tan 2α = dτ x, y , dα = 0 , que implica − (σ x − σ y ) (8) 2τ xy La expresión anterior tiene dos raíces que definen dos planos mutuamente perpendiculares donde las tensiones de corte son iguales. Se observa que los valores de tan2α que determinan los planos de máxima/mínima tensión normal y máxima tensión de corte son recíprocos negativos. Por lo tanto, las raíces de la variable 2α de las dos ecuaciones anteriormente mencionadas (Ecs. 7 y 8) difieren en 90ºy los planos correspondientes en 45º (Fig. 3). σ2 τmax σ1 σ1 45 º β σ2 Fig. 3. Planos principales y de máxima tensión de corte B- Funciones angulares para tensiones principales La tensión normal máxima (σ1) y mínima (σ2) está dada por la geometría presentada en la Fig. 4 (condición de planos principales) y las Ec. 6 (σ ) x , max, min = σ 1, 2 = σ x +σ y 2 σ x −σ y ± 2 + (τ xy )2 2 4 (9) τ 2 ½(σx – σy) A 2α1 τxy −τxy B σ x −σ y +τ xy2 OA= OB = 2 σ sin (2α 1, ) = − sin (2α 1" ) = cs (2α 1, ) = −cs(2α 1" ) = -½(σx – σy) τ xy OA 1 / 2(σ x − σ y ) OA Fig. 4. Tensiones principales De forma similar se pueden encontrar las funciones angulares para la máxima tensión de corte. La tensión de corte máxima y mínima está dada por (τ )max, min σ x −σ y = ± 2 + (τ xy )2 2 (10) La tensión de corte máxima difiere de la tensión de corte mínima sólo en el signo. Como ya fue establecido, estas tensiones “extremas” actúan en planos mutuamente perpendiculares. C- Interpretación Gráfica de las Ecuaciones de Transformación de Tensiones: Círculo de Mohr Reescribiendo las ecuaciones de transformación de tensiones, Ec. 6, se obtienen las siguientes expresiones σ x +σ y σ x , − 2 σ y −σ x τ x, y , = 2 σ x −σ y = 2 cos 2α + τ xy sin 2α sin 2α + τ xy cos 2α (11a) (11b) 5 Ambas ecuaciones se eleven al cuadrado y luego se suman, resultando la expresión siguiente σ +σ y σ , − x x 2 + τ x , y , 2 ( ) 2 σ x −σ y = 2 + (τ xy )2 2 (12) En un problema de tensiones dado, las variables σx, σy yτxy son conocidas, siendo σ x, (σ y τ x , y , incógnitas. Entonces, la Ec. 12 puede ser reescrita como sigue ) ( ) − a + τ x, y , 2 x, 2 = b2 (13) La Ec. 13 representa la ecuación analítica de un círculo de radio b con centro en (0, a) (Fig. 5). τ σ3 b σ2 σ1 σ a Fig. 5. Círculo de Mohr para un estado de tensiones planas 6 D- Estado Tridimensional de Tensiones: Círculo de Mohr Considerar un sólido tridimensional sometido a un estado de tensiones principales, tal como se muestra en la Fig. 6. Elemento rotado en torno al eje principal c Estado de tensiones principales σb b σy τyx σa τxy σx a σa σc σa > σb > σc σc σb Fig. 6. Estado tridimensional de tensiones El sólido de la Fig. 6 se rota en torno al eje principal c. Las tensiones de corte asociadas al plano definido por c, siguen siendo cero. La correspondiente transformación de tensiones ocurre en los planos definidos por los vectores a y b. Esta transformación de tensiones puede ser analizada como si fuese una transformación plana de tensiones. τ τmax C A B σ σmin σmax Fig. 7. Representación de un estado tridimensional de tensiones 7 Comentarios sobre Fig. 7. Círculo de diámetro AB determina las tensiones normales y de tangenciales (corte) debido a una rotación en torno al eje c. Similarmente, círculos de diámetro CB y CA se usan para obtener las tensiones resultantes (normales y tangenciales) en el sólido debido a rotaciones en torno a los ejes a y b respectivamente. El análisis efectuado en base a la Fig. 7, se basa considerando los ejes principales (a, b y c). Cualquier otra transformación inducirá tensiones que se representan en un punto del área achurada. 8