T-051 - Universidad Nacional del Nordeste
Anuncio

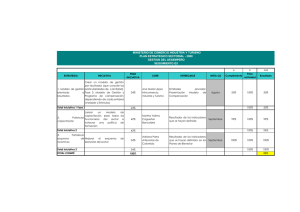
Resumen: T-051 UNIVERSIDAD NACIONAL DEL NORDEST E Comunicaciones Científicas y Tecnológicas 2006 Rele varimétrico con microcontrolador Marder, Felipe - Lombardero, Oscar G. - Aquino, Carlos de J. Dto. de Ingeniería Eléctrica FACENA UNNE, 9 de julio 1449 2º P Lab. Nº 7 email [email protected] Resumen El presente trabajo con carácter de desarrollo tecnológico, forma parte del proyecto PI Nº 19 / 04 aprobado por la Secretaría de Ciencia y Técnica de la UNNE, titulado “Aplicaciones Industriales basadas en Microcontroladores”. El mismo consiste en el diseño e implementación de un dispositivo para la corrección automática del factor de potencia empleando un microcontrolador PIC. El sistema cuenta con una parte analógica que determina los cruces por cero de señales proporcionales a la tensión y corriente por la carga. A partir de la ubicación relativa y la separación de los puntos de cruce, el micro determina el grado de desfasaje y el carácter de la carga. Con esos datos determina la necesidad de la compensación, actuando en consecuencia sobre una batería de capacitores, permitiendo una compensación lineal. Esta técnica permite una simplificación del sistema y consecuente abaratamiento de costos. Antecedentes La crisis en la generación y distribución de energía eléctrica trae aparejada como consecuencia una readecuación permanente de las tarifas eléctricas por parte de la Secretaría de Energía. Este ajuste se ve acompañado no sólo por el costo por KW consumido sino por las penalizaciones a las industrias con equipamientos medianos y grandes, por excederse de los valores permitidos en el factor de potencia (FP). Los regímenes de facturación establecen beneficios o penalizaciones en función del valor de desfasaje entre tensión y corriente, lo que se conoce como el valor del cos φ, el cual debe estar por encima de 0,95 para tener bonificaciones que pueden rondar el 2,5% del valor total del consumo registrado. Por el contrario, la penalización se efectúa en función de la diferencia de fase actual y la máxima permitida, a razón del 1,5%, por cada centesimo de la tangente de φ. Tomando como ejemplo un desfasaje actual de 36,86º al que le corresponde un cos φ de 0,80, y sabiendo que el máximo permitido es 18º o sea una cos φ de 0,95, la diferencia total es de 18,86º cuya tangente correspondiente es de 0,34. Este valor multiplicado por 1,5 nos da 0,51 o sea que el recargo final es del 51% sobre el facturado. Se define el factor de potencia así factor de potencia = potencia real o activa potencia total o aparente [KW] [KVA] En definitiva, la finalidad de la corrección del factor de potencia es reducir o eliminar el costo de energía reactiva en la facturación. Para ello existen diversos métodos empleados del lado del usuario del medidor de potencia. Existen compensaciones individuales en motores, por grupo de cargas, o centralizada. Las empresas que ofrecen dispositivos de corrección presentan tablas para el cálculo o estimación del tipo de banco de capacitores a utilizar, según el cos φ actual, el deseado, y el consumo o carga instalada. El presente trabajo consiste en el diseño e implementación de un sistema (también denominado relé varimétrico) para medir el desfasaje en grados en forma sencilla y económica, y realizar la corrección automática del factor de potencia empleando un microcontrolador. Debe dejarse en claro que las ecuaciones anteriores son válidas en el caso de que las formas de onda de tensión y corriente sean senoidales puras. En la realidad esto no se cumple ya que los sistemas de control, los procesos de arranque de motores, los transitorios, el ruido eléctrico en general, inducen corrientes poliarmónicas que generan calor como pérdida y no necesariamente se traduce en trabajo electromecánico. La técnica convencional para la corrección del factor de potencia emplea un medidor de desfasaje entre la tensión y la corriente por la carga, un detector del carácter inductivo o capacitivo de la misma, y una parte lógica que determina el momento, la secuencia y la adición o sustracción de los capacitores de compensación a través de contactores. Existen sistemas más elaborados que tienen en cuenta este detalle, y toman decisiones, son los llamados inteligentes. La Figura Nº 1 muestra el diagrama en bloques del sistema. Resumen: T-051 UNIVERSIDAD NACIONAL DEL NORDEST E Comunicaciones Científicas y Tecnológicas 2006 Materiales y Metodología empleada 220V C A R G A TI TV Contactores y banco de capacitores µC opto induc capac correg Figura Nº 1 Diagrama en bloques del relé varimétrico con microcontrolador Los bloques TI y TV son los transformadores de corriente y tensión respectivamente. La señal proveniente de ellos pasa por los detectores de cruce por cero correspondientes, generando pulsos que son señales de entrada al µC y proporcionales al desfasaje φ1. A partir de la posición relativa de los flancos se puede determinar el tipo de carga (inductiva o capacitiva), que será determinante al momento de realizar la compensación. Figura Nº 2. Diagrama esquemático del relé varimétrico El desfasaje máximo puede ajustarse según necesidad o requerimiento del usuario, y mientras esté compensado el sistema, se enciende una señal lumínica verde. El programa de control genera una habilitación para la compensación en caso que esta sea necesaria, cada minuto aproximadamente. En la Figura Nº 2 podemos observar el circuito esquemático del sistema completo. U1a y U1b conforman la señal de corriente y de tensión respectivamente actuando como detectores de cruce por cero. U2 es el micro que realiza el resto de las operaciones, o sea determina el carácter de la carga según sea el flanco que llega primero, calcula el tiempo que media entre ellos y que es proporcional a la diferencia de fase entre ambos parámetros. Sabiendo que 10 mS representan un desfasaje de 180º , se estableció por razones de programación un valor de 800 µS, con el cual el máximo quedaba fijado en 14,5º que es un límite más conveniente. El micro señala si la carga es capacitiva o inductiva con una Resumen: T-051 UNIVERSIDAD NACIONAL DEL NORDEST E Comunicaciones Científicas y Tecnológicas 2006 señalización amarilla o roja respectivamente, habilitando la lógica para que actúe en el caso de que el sistema no esté corregido. Hay una segunda condición que puede presentarse cuando se llega al limite. En ese caso el sistema no responde más porque el contador llega a su valor máximo, y ya se incorporaron todos los capacitares de compensación. A partir de un transformador comercial de 12V@300mA se alimenta todo el sistema y se obtiene una tensión proporcional a la aplicada en la carga. La activación de los contactores se realiza a través de opto acopladores para brindar al sistema un aislamiento galvánico incrementando el grado de seguridad. En la Figura Nº 3 podemos observar el diagrama de flujo del programa que controla el funcionamiento del µC. Después de buscar y encontrar el nivel cero tanto de la entrada de tensión como la de corriente, la rutina comienza determinando la característica de la carga y midiendo el tiempo entre ambos flancos. Esta cantidad se promedia con los valores almacenados anteriores y el resultado se compara con el valor máximo permitido. De esta manera se determina la necesidad o no de corrección (compensación). Si se supera el valor máximo permitido, se realiza el proceso de compensación, conforme al tipo de carga determinada anteriormente. La rutina de compensación se realiza una vez cada minuto, y tiene un comportamiento lineal, o sea que la batería de capacitares se incrementa o decrementa linealmente. Inicializa registros Inicio detecta nivel cero-cero N1 RA0=0? si N2 RegF,0=0? no no si 1 = RegF,0 no N5 RegF,1=0? Lectura TMR0 Reseteo TMRO Promediación si 0 = RegF,0 0 = RegF,1 1 = RA2, clrf TMRO 1 = RegF,3 N3 RA1=0? si M1 si RegF3=0? no no no Reg2=0? N 22 RegF,1=0? RegF,4=0? si 1 = RegF,1 M2 0 = RegF,3 Reg2 - 1 no N4 0 = RegF,4 Reg5 – Reg4 no RegF,0=0? si 1 = RA3 clrf TMRO si Cy = 0? si 1 = RA4 no rutina de corrección RA2=0? si no N6 (agrega C) 250 = Reg2 Reg3 - 1 1 = RegF,4 12 = Reg3 250 = Reg2 si Reg3=0? pasó un minuto? M3 (quita C) no Figura Nº 3. Diagrama en bloques de la rutina principal de control El temporizador interno del micro (TMRO) es el encargado de contabilizar el tiempo entre flancos. La precisión viene determinada por divisor (prescaler) fijado al comienzo de la rutina. Se adoptó en 32, por razones expuestas anteriormente. A partir de los puntos señalados como Nodo 6 y Nodo M3 se ejecutan subrutinas que verifican el estado previo a la nueva corrección, y actúan en consecuencia agregando o quitando capacitares respectivamente. Luego de la compensación regresan a determinar el estado cero-cero de las señales conformadas de tensión y corriente, para reiniciar el ciclo. Conclusiones Se implementó un Relé varimétrico lineal como corrector del factor de potencia para una carga máxima de 90 KVAR. El prototipo controla hasta ocho capacitares de compensación de 15 KVAR. Su limitación pasa por una cuestión de presupuesto dado el costo de los capacitares y de los contactores aumenta considerablemente con el valor de potencia a controlar. Se considera estar frente a un sistema confiable, ya que el mismo ha sido ensayado en nuestro laboratorio. Resumen: T-051 UNIVERSIDAD NACIONAL DEL NORDEST E Comunicaciones Científicas y Tecnológicas 2006 Este sistema viene a reemplazar la versión anterior del Relé varimétrico realizado con lógica discreta y con Relé electromecánicos para manejo de los contactores. Bibliografía 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Marder F, Lombardero OG., “Fasímetro analógico industrial”. Rev. Ing. Eléctrica Vol. 15 Nº 164 pag 10-12, Nov 2002. Marder F, Lombardero OG “Cofímetro Digital Industrial” Rev. Ing. Eléctrica Vol. 15 Nº 165 pag 10-12 Dic de 2002. Breant P. , Medidas Eléctricas , Ed Aguilar Cooper W., Helfrick A. “Instrumentación Electrónica Moderna y Técnicas de Medición” Siemens Corrección del Factor de Potencia cos ϕ SGS Thompson “Understanding Power Factor” Application Notes Nº 824/07/95 ASTEC “Power Factor Correction” http://www.ASTEC.com INELAP “Guía para corregir el Factor de Potencia” http://www.inelap.com.mx P. Guillemin, JM Carretón “Corrección Digital del Factor de Potencia con corrientes no sinusoidales” Rev Telegráfica Electrónica Nº 19 Pág. 449-456. Sobrevila Marcelo A. “Instrumentos y Medidas Eléctricas” Ed. Alsina. 2005.