Apuntes 1
Anuncio

Capı́tulo 1
Espacios vectoriales lorentzianos.
Relatividad Especial
A lo largo de este capı́tulo, V = V (R) denotará un espacio vectorial real de dimensión n.
1.1.
Espacios vectoriales con un producto escalar
La presente sección introduce propiedades algebraicas elementales de las formas bilineales
simétricas (tensores 2-covariantes simétricos). Como referencias principales pueden tomarse [?,
Ch 2] y [?, Sect. 2.3].
1.1.1.
Formas bilineales simétricas y productos escalares
Definición 1.1.1 Sea b : V × V −→ R una forma bilineal simétrica. Diremos que b es:
definida positiva (resp. negativa) si b(v, v) > 0 (resp. b(v, v) < 0), ∀v ∈ V \ {0},
semidefinida positiva (resp. semidefinida negativa) si b(v, v) ≥ 0, (resp. b(v, v) ≤ 0) ∀v ∈ V ,
indefinida si no es ni semidefinida positiva ni semidefinida negativa,
no degenerada si la igualdad b(v, w) = 0, ∀w ∈ V implica v = 0. En caso contrario, diremos
que b (y eventualmente V ) es degenerada, y llamaremos a N = {v ∈ V | b(v, w) = 0, ∀w ∈
V } el radical de b.
1
2
Capı́tulo – 1.
Espacios vectoriales lorentzianos. Relatividad Especial
El siguiente teorema, proporciona una base de V en la que expresar b de manera sencilla1 :
Teorema 1.1.2 (Teorema de Sylvester) Dada una forma bilineal simétrica b en V , existe una
base ortonormal de V , esto es, una base B = {e1 , . . . , eµ , . . . , eµ+ν , . . . , en }, tal que b(ei , ej ) = ²i δij
donde δij es la delta de Kronecker y ²i = 0 (resp. ²i = −1; ²i = 1) si i = 1, . . . µ (resp. i =
µ + 1, . . . , ν, i = ν + 1, . . . , n); es decir, la matriz de b en la base B (con su ordenación natural) es:
0µ
−Iν
MB (b) =
In−(µ+ν)
Además, Los valores de µ y ν no dependen de la base escogida.
Al valor ası́ obtenido de ν le llamaremos ı́ndice de b. A n − µ le llamaremos el rango; a µ en
ocasiones se le llama la nulidad de b).
Hay diversas formas de probar este teorema. Una de ellas se puede llevar a cabo en los siguientes
pasos.
(A) Para la existencia de bases ortonormales:
(A1) tómese una base cualquiera B1 y considérese la matriz de b en esta base,
(A2) al ser esta matriz simétrica, se puede diagonalizar por congruencia, hallándose ası́ una
nueva base B2 tal que MB2 (b) es diagonal,
(A3) dividiendo cada elemento v de B2 por la raı́z de |b(v, v)| (si ésta no es 0), y reordenándolos
si es necesario, se obtiene la base ortonormal B requerida.
(B) Para la unicidad de ı́ndice y nulidad:
(B1) el número µ se corresponde con la dimensión del radical de b y es por tanto independiente
de la base B construida2 , y
(B2) el valor de ν también es independiente de la base B: en caso contrario, si existiera una
segunda base ortonormal B 0 con, digamos ν 0 > ν, la intersección del subespacio U 0 generado por
los µ + ν 0 primeros vectores de B 0 y el W generado por los n − (µ + ν) últimos de B tendrı́a
dimensión mayor que 0, esto es existitirı́a un vector u ∈ W ∩ U 0 \{0} el cual, necesariamente,
verificarı́a b(u, u) > 0 y b(u, u) ≤ 0.
En el ejercicio 1.1.15 se proporciona un esquema de demostración, mediante un procedimiento
similar al de ortonormalización de Gram-Schmidt, por el que se prueba no sólo la existencia de
bases ortonormales sino que toda base ortonormal de un subespacio no degenerado U se puede
ampliar a una base ortonormal de todo el espacio vectorial. Ese procedimiento es el útil desde el
punto de vista práctico, pues, entre otras razones, el arriba descrito pasa por calcular los valores
propios de una matriz simétrica, lo cual no es siempre posible explı́citamente.
1 Notación: dada una base (ordenada) B = (v , . . . , v ) de V (R), M (b) denota la matriz de b en la base B, esto
n
1
B
es, aquélla con elementos bij = b(vi , vj ).
2 Alternativamente, véase la observación 1.1.8.
1.1. Espacios vectoriales con un producto escalar
3
Ejercicio 1.1.3 ¿Es cierto que toda base ortonormal de un subespacio U (posiblemente degenerado) de V se puede ampliar a una base ortonormal de todo el espacio vectorial?
Observación 1.1.4
(1) En el Teorema de Sylvester, el subespacio generado por los primeros µ vectores de cualquier
base ortonormal3 < e1 , . . . , eµ >R coincide con el radical de b y, por tanto, no depende de
la base B escogida. En cambio < eµ+1 , . . . , eµ+ν >R sı́ depende de la base, al igual que
< eµ+ν+1 , . . . , en >R .
(2) Se considera un subespacio W < V . La restricción bW := b|W ×W de b es una nueva forma
bilineal sobre W , que puede ser degenerada aunque b no lo sea.
(3) Sean V , V 0 dos espacios vectoriales y b, b0 sendas formas bilineales simétricas sobre V y V 0
respectivamente. Fácilmente se demuestra que existe un isomorfismo f : V −→ V 0 que preserve
b y b0 (i.e. b(x, y) = b0 (f (x), f (y)) ∀x, y ∈ V ) si y sólo si n = n0 , µ = µ0 , y ν = ν 0 .
Sea qb : V −→ R, qb (x) = b(x, x), la forma cuadrática asociada a b. Es fácil comprobar que b se
puede reconstruir a partir de qb mediante la relación:
b(u, v) =
1
(qb (u + v) − qb (u) − qb (v))
2
Definición 1.1.5 Sean V , b, diremos que v ∈ V es
temporal si qb (v) < 0,
luminoso si qb (v) = 0 y v 6= 0,
espacial si qb (v) > 0,
causal si v es temporal o luminoso.
También escribiremos,
|v| =
p
|qb (v)|
3 Notación: la envolvente lineal de un subespacio generado por un conjunto de vectores {v , . . . , v } se denom
1
tará hv1 , . . . , vm iR . El subı́ndice R indicará que esta envolvente se calcula tomando como escalares a los reales (más
adelante, se usará como subı́ndice C al usar complejos) y permitirá distinguir entre la envolvente lineal y el producto
escalar usual de Rn .
4
Capı́tulo – 1.
Espacios vectoriales lorentzianos. Relatividad Especial
No hay un criterio universalmente aceptado para el carácter del vector cero. En ocasiones se
incluye entre los luminosos y en otras entre los espaciales. Nosotros, a los vectores luminosos junto
al cero los llamaremos vectores nulos, a los causales junto al cero vectores no espaciales y a los
espaciales junto al cero vectores no causales.
Ejercicio 1.1.6 Pruébese que si b es indefinida existe una base formada por vectores temporales
(respectivamente luminosos, espaciales)
Definición 1.1.7 Un producto escalar g sobre V es una forma bilineal simétrica no degenerada.
Diremos que g es:
euclı́deo si ν = 0,
lorentziano si ν = 1 y n ≥ 2.
Por supuesto, el producto escalar será indefinido si lo es como forma bilineal simétrica.
Observación 1.1.8
La forma bilineal simétrica b es un producto escalar si y sólo si det(MB (b)) 6= 0 (para una
base B y, entonces, para cualquier base).
Sean B = (v1 , . . . , vn ), B 0 = (v10 , . . . , vn0 ) dos bases, y sea P = M (IV , B ← B 0 ) la matriz
cuyas columnas proporcionan ordenadamente las coordenadas de los elementos de la base B 0
expresados en la base4 B; entonces:
MB 0 (b) = P t MB (b)P,
det(MB 0 (b)) = (det P )2 det(MB (b)).
Ası́, el rango de la matriz MB (b) es independiente de B, y equivale al de b. Luego, para
cualquier producto escalar g se tiene:
(−1)ν det(MB (g)) > 0.
4 Notación. Seguimos siempre el siguiente convenio: si f : V → V 0 es una aplicación lineal y B, B 0 son bases
(ordenadas) de V, V 0 resp., B = (v1 , . . . , vn ) entonces M (f, B 0 ← B) es la matriz cuyas columnas están formadas
por las coordenadas de (f (v1 ), . . . , f (vn )) en B 0 . Ası́, dado un vector v ∈ V , el producto de la matriz M (f, B 0 ← B)
por el vector-columna de las coordenadas de v en B es igual al vector-columna de las coordenadas de f (v) en B 0 . En
particular, cuando f es la identidad en V , IV , se tiene la matriz de cambio de base (o paso) de B a B 0 . De acuerdo
con nuestros convenios, dada una tercera base, B 00 se tiene: M (IV , B 00 ← B 0 )M (IV , B 0 ← B) = M (IV , B 00 ← B).
5
1.1. Espacios vectoriales con un producto escalar
Si g es un producto escalar y B = {e1 , . . . , eν , eν+1 , . . . , en } cualquier base ortonormal entonces
n
X
v=
²i g(ei , v)ei , ²i = g(ei , ei )(= ±1)
i=1
Pn
(la demostración es inmediata, teniendo en cuenta que v − i=1 ²i g(ei , v)ei es ortogonal a
todos los vectores de la base y, por tanto, pertenece al radical de b). Las bases ortonormales se supondrán por defecto ordenadas, de modo que todas ellas tienen el mismo valor de
(²1 , . . . , ²n ). A esta n− upla se le llama la signatura de g. Dada nuestra definición de base ortonormal en el Teorema de Sylvester, suponemos por defecto la signatura (−, . . . , −, +, . . . , +).
Para productos escalares cualesquiera, retendremos la nomenclatura de los euclı́deos. Ası́,
p.ej., si f es un endomorfismo (vectorial) de (V, g) diremos que f es una isometrı́a (resp.
autoadjunto) si g(u, v) = g(f (u), f (v)) (resp. g(u, f (v)) = g(f (u), v)) para todo u, v ∈ V .
Ejemplo 1.1.9 En Rn definimos el producto escalar usual de ı́ndice ν, h·, ·iν , como:
h(a1 , . . . , an ), (b1 , . . . , bn )iν = −
ν
X
ai bi +
i=1
n
X
ai bi .
i=ν+1
Definición 1.1.10 Sea (V, g) un espacio vectorial con un producto escalar g. Sean v, w ∈ W , v
se dice ortogonal a w, v ⊥ w si g(v, w) = 0. Consecuentemente, para A, B ⊆ V , se dice que A es
ortogonal a B, A ⊥ B, si v ⊥ w, ∀v ∈ A, ∀w ∈ B. Denotaremos A⊥ al subespacio:
A⊥ = {w ∈ V : g(v, w) = 0, ∀v ∈ V }
Ejemplo 1.1.11 Considérese R2 con el producto escalar:
h(t, x), (t0 , x0 )i = −tt0 + xx0 .
Obsérvese, por ejemplo, las siguientes relaciones de perpendicularidad, que contrastan fuertemente
con las euclı́deas:
(y, 1) ⊥ ±(1, y),
< (1, 1) >R ⊥< (1, 1) >R .
Definición 1.1.12 Sea (V, g) un espacio vectorial con un producto escalar. Un subespacio vectorial
W < V se dice no degenerado si W ∩ W ⊥ = {0} (o, equivalentemente, si la restricción gW es no
degenerada).
Proposición 1.1.13 Sea W < V , entonces:
6
Capı́tulo – 1.
Espacios vectoriales lorentzianos. Relatividad Especial
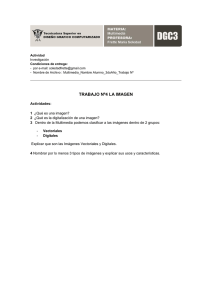
Figura 1.1: R2 con el producto lorentziano usual (el eje vertical se asigna a la primera coordenada,
t). Dos rectas vectoriales son ortogonales si y sólo si se obtiene una de la otra por reflexión a lo
largo de una diagonal.
(1) dim W + dim W ⊥ = dim V ,
(2) (W ⊥ )⊥ = W ,
(3) V = W + W ⊥ ⇔ W es no degenerado (⇔ W ⊥ es no degenerado).
Demostración : (1) Sea
Pn B = {e1 , . . . , eρ , eρ+1 , . . . , en } una base de V tal que {e1 , . . . , eρ } es una
base de W . Si v = i=1 ai ei , entonces:
v ∈ W ⊥ ⇔ g(v, ei ) = 0
∀i ∈ {1, . . . , ρ} ⇔
n
X
gij aj = 0
∀i ∈ {1, . . . , ρ},
j=1
donde gij = g(ei , ej ). Como g es no degenerada, el subespacio W ⊥ viene dado como solución
de un sistema lineal de ρ ecuaciones independientes con n incógnitas, luego dim W ⊥ = n − ρ.
(2) La inclusión (W ⊥ )⊥ ⊃ W es trivial, y como, por (1), dim(W ⊥ )⊥ = dim W , se tiene la igualdad.
(3) Es consecuencia directa de (1) (la afirmación entre paréntesis de (2)).
Q.E.D.
Como consecuencia del resultado anterior, se tiene:
1.1. Espacios vectoriales con un producto escalar
7
Corolario 1.1.14 Toda base ortonormal BU = {e1 , . . . , eν 0 , eν 0 +1 , . . . , en0 } de un subespacio no
degenerado U de V , ν 0 ≤ ν, n0 ≤ n, se puede ampliar hasta una base ortonormal de (V, g).
Demostración : Como U ⊥ tampoco es degenerado, complétese BU con una base ortonormal de
U ⊥.
Q.E.D.
Ejercicio 1.1.15 Obsérvese que la demostración de la proposición 1.1.13 es directa, y se puede
llevar a cabo sin más que un mı́nimo conocimiento preliminar de sistemas de ecuaciones lineales. A
partir de ella se puede obtener una demostración del Teorema de Sylvester, ası́ como una extensión
del corolario 1.1.14 al caso de formas bilineales simétricas degeneradas, mediante un procedimiento
constructivo que generaliza al de ortonormalización de Gram-Schmidt. Se propone realizar esto
siguiendo el siguiente esquema. Sea b una forma bilineal simétrica:
(1) Supongamos que b es no degenerada.
(1A) Sea el conjunto H = {e1 , . . . , eν 0 , eν 0 +1 , . . . , en0 } (posiblemente vacı́o) una base ortonormal
de un subespacio no degenerado U 6= V . Entonces existe un vector v 6∈ U tal que H ∪ {v} es
ortonormal y genera un subespacio no degenerado.
(1B) Demuéstrese la existencia de una base ortonormal inductivamente a partir del resultado
anterior.
(1C) Pruébese el resto de afirmaciones del Teorema de Sylvester (en su enunciado 1.1.2).
(1D) Sea B = (v1 , . . . , vn ) cualquier base tal que hv1 , . . . , vk i es un subespacio no degenerado
para k = 1, . . . , n. Constrúyase una base ortonormal a partir de B mediante un procedimiento
análogo al de ortonormalización de Gram-Schmidt.
(2) Si b es degenerada con radical N :
(2A) Demuéstrese que b se induce en una forma bilineal simétrica no degenerada b̄ sobre el
espacio cociente V /N , definida por b̄([u], [v]) = b(u, v)∀u, v ∈ V , donde [u], [v] denotan, resp., las
clases de u y v en V /N .
(2B) Aplı́quese el caso (1) a b̄ y pruébese el Teorema de Sylvester para b.
1.1.2.
Acotación de una forma bilineal simétrica por un producto escalar
Sea g un producto escalar euclı́deo. Se sabe que, para cualquier forma bilineal simétrica b,
existe una base ortonormal B = (e1 , ·, en ) de g tal que b(ei , ej ) = λi δij . Ası́, si λi ≥ 1 para todo i,
necesariamente b(v, v) ≥ g(v, v) para todo v ∈ V . La situación cambia drásticamente si el producto
escalar es indefinido. Para su demostración, precisaremos la siguiente sencilla propiedad técnica.
Lema 1.1.16 Sea v un vector luminoso, entonces existen sendas sucesiones {uk }k , y {vk }k convergentes a v tal que uk es temporal, y vk es espacial para todo k ∈ N.
8
Capı́tulo – 1.
Espacios vectoriales lorentzianos. Relatividad Especial
Demostración : Sea u un vector temporal tal que g(u, v) ≤ 0, y w un vector espacial no nulo tal
que g(v, w) ≥ 0 (obviamente, tales vectores pueden conseguirse cambiando u, w por −u, −w si es
preciso). Las sucesiones requeridas son:
uk = v +
1
u,
k
wk = v +
1
w.
k
Q.E.D.
Teorema 1.1.17 (Criterio de Dajczer, Nomizu y otros) Sea (V, g) un espacio vectorial con
un producto escalar indefinido, n = dim V , ν = ı́ndice de g, y sea b una forma bilineal simétrica.
Equivalen:
(1) b = c · g para algún c ∈ R,
(2) qb = 0, sobre vectores luminosos de g,
(3) ∃a > 0 : |qb /qg | ≤ a sobre vectores temporales de g,
(4) ∃a0 > 0 : |qb /qg | ≤ a0 sobre vectores espaciales de g distintos de cero,
(5) ∃a ∈ R : qb /qg ≤ a sobre vectores no luminosos de g distintos de cero,
(6) ∃a0 ∈ R : qb /qg ≥ a0 sobre vectores no luminosos de g distintos de cero.
Demostración : (1) ⇒ (resto) Es obvio.
(2) ⇒ (1) Distinguimos casos:
Caso I: Si n = 2, ν = 1:
Sea B = {e1 , e2 } una base ortonormal para g, entonces v1 = e1 + e2 y v2 = e1 − e2 son
vectores luminosos. Si bij = b(ei , ej ) se tiene:
0 =
0 =
b(v1 , v1 ) =
b(v2 , v2 ) =
b11 + 2b12 + b22
b11 − 2b12 + b22
¾
½
⇒
b12
b11
= 0
= −b22
Luego b = b22 · g.
Caso II: Si n > 2, ν = 1:
Sea B = {e1 , . . . , en } una base ortonormal para g con g(e1 , e1 ) < 0, y bij = b(ei , ej ).
Aplicando el Caso I a cada plano he1 , ei iR , i ∈ {2, . . . , n}, se obtiene b1i = 0, bii = −b11 ,
∀i ∈ {2, . . . , n}. Luego tenemos por el momento:
9
1.1. Espacios vectoriales con un producto escalar
−c
0
MB (b) =
0
?
c
c
..
.
?
con c = −b11 . Si definimos el vector luminoso v(θ) = e1 + cos(θ)ei + sen(θ)ej , para
i, j > 1, i 6= j, se sigue que:
0 = b(v(θ), v(θ)) = b11 + cos2 (θ)bii + sen2 (θ)bjj + 2 sen(θ) cos(θ)bij = sen(2θ) bij .
Ası́ bij = 0, con lo cual:
0
−c
MB (b) =
0
0
c
c
..
.
0
Caso III: Si n ≥ 2, ν = n − 1:
Este caso se resuelve como el anterior pero considerando el producto escalar −g en vez
de g.
Caso IV: Si n ≥ 3, 1 < ν < n − 1:
Sea B = {e1 , . . . , eν , eν+1 , . . . , en } una base proporcionada por el teorema de Sylvester
para g, y bij = b(ei , ej ). Razonando como en el Caso II al restringirnos al subespacio
< ek , e(ν+1) , . . . , en >R para cada k ∈ {1, . . . , ν}, se obtiene:
−c
MB (b) =
?
?
..
.
0
−c
0
c In−ν
Se termina razonando como en el Caso III, al restringirnos al subespacio < e1 , . . . , eν , ek >R
para un valor de k ∈ {ν + 1, . . . , n}:
µ
MB (b) =
−cIν
0
0
¶
c In−ν
Para el resto de la demostración del teorema será necesario usar el Lema 1.1.16.
10
Capı́tulo – 1.
Espacios vectoriales lorentzianos. Relatividad Especial
(3) ⇒ (2) Sea u un vector luminoso, y uk una sucesión de vectores temporales convergentes a u;
de nuestra hipótesis (3) se tiene que:
0 ≤ |qb (uk )| ≤ a|qg (uk )|.
Tomando lı́mite se tiene:
0 ≤ |qb (u)| ≤ a|qg (u)|(= 0).
Luego qb (u) = 0, para todo vector luminoso u.
(4) ⇒ (2) Se prueba análogamente a (3) ⇒ (2), haciendo uso del lema anterior.
(5) ⇒ (2) Sea u un vector luminoso, uk y vk sendas sucesiones convergentes a u de vectores
temporales y espaciales, respectivamente. Por hipótesis:
qb (uk ) ≥ aqg (uk ),
qb (vk ) ≤ aqg (vk ).
Tomando lı́mite:
qb (u) ≥ aqg (u) = 0,
qb (u) ≤ aqg (u) = 0.
Luego, qb (u) = 0, ∀u luminoso.
(6) ⇒ (2) Se prueba análogamente a (5) ⇒ (2).
Q.E.D.
Como consecuencia inmediata de este teorema se obtiene la siguiente caracterización de los productos escalares homotéticos.
Corolario 1.1.18 Sean g, g 0 dos productos escalares indefinidos sobre V con igual ı́ndice ν 6= n/2.
Entonces
∃c > 0 : g 0 = cg ⇔ g, g 0 tienen iguales vectores luminosos
(La excepción ν 6= n/2 se impone sólo para asegurar que la constante c sea positiva).
1.1.3.
Subiendo y bajando ı́ndices.
El espacio dual
Recordemos que, dado el espacio vectorial de dimensión finita V (R), se define su espacio dual
como el espacio vectorial V ∗ (R) constituido por todas las formas lineales sobre V , esto es, las
aplicaciones lineales ϕ : V → R. Necesariamente, las dimensiones de V y V ∗ coinciden; de hecho,
11
1.1. Espacios vectoriales con un producto escalar
fijada cualquier base (ordenada) B = (v1 , . . . , vn ) de V , se define su base dual B ∗ = (ϕ1 , . . . , ϕn )
como la única base de V ∗ tal que ϕi (vj ) = δji . En consecuencia, se tiene:
v=
n
X
ϕi (v)vi ,
∀v ∈ V,
ϕ=
i=1
n
X
ϕ(vj )ϕj ,
∀ϕ ∈ V ∗ .
j=1
Resulta bien conocido que, si f : V → V̄ es una aplicación lineal, la aplicación traspuesta de f ,
f t : V̄ ∗ → V ∗ , definida por f t (φ̄) = φ̄ ◦ f es lineal. Fijadas bases B, B̄ de, resp., V y V̄ , se tiene
entonces M (f t , B ∗ ← B̄ ∗ ) = M (f, B̄ ← B)t . Más aún, existe un isomorfismo canónico entre V y
su espacio bidual V ∗∗ = (V ∗ )∗ definido por Φ : V → V ∗∗ , v 7→ Φv donde Φv (ϕ) = ϕ(v), ∀ϕ ∈ V ∗ .
En cualquier base B y la correspondiente bidual B ∗∗ = (B ∗ )∗ , se tiene que M (Φ, B ∗∗ ← B) es la
matriz identidad, In .
Isomorfismos bemol y sostenido
Definición 1.1.19 Sea g un producto escalar de V , se define el isomorfismo bemol, [ : V −→ V ∗ ,
como:
[(v) ≡ v [ : V −→ R
v [ (w) = g(v, w),
∀v, w ∈ V.
El isomorfismo inverso de [ es el llamado sostenido, ] : V ∗ −→ V :
](ϕ) ≡ ϕ] ,
caracterizado por:
g(ϕ] , w) = ϕ(w),
∀w ∈ V, ∀ϕ ∈ V ∗ .
No es difı́cil comprobar que, efectivamente, ambas aplicaciones son isomorfismos vectoriales5 . En
coordenadas los isomorfismos bemol y sostenido se escriben de la siguiente manera. Sea B =
(v1 , . . . , vn ) una base (ordenada) de V , y B ∗ = (ϕ1 , . . . , ϕn ) su correspondiente base dual. Denotamos
gij = g(vi , vj ),
g ij = (MB (g)−1 )ij .
Pn
Si v = i=1 ai vi , entonces:
[
v =
n
X
j=1
j
aj ϕ ,
donde aj =
n
X
gij ai ;
i=1
5 La aplicación bemol tiene sentido además como aplicación lineal para cualquier forma bilineal, aunque sea
degenerada, pero falları́a la biyectividad, al coincidir el núcleo de [ con el radical de b.
12
Capı́tulo – 1.
Espacios vectoriales lorentzianos. Relatividad Especial
aPla definición de los aj se le llama “bajar ı́ndices”. Análogamente para “subir ı́ndices”: si ϕ =
n
j
j=1 bj ϕ , entonces
n
n
X
X
ϕ] =
b j vj ,
donde bj =
g ij bi .
i=1
i=1
Observación 1.1.20 Sea B = (e1 , . . . , eν , eν+1 , . . . , en ) una base ortonormal,
½
−1 si i ≤ ν
gij = δij εi ,
εi =
1 si i > ν + 1
Si g es euclı́dea entonces ai = ai . En cambio, si g es lorentziana, a1 = −a1 , ai = ai , i > 1.
Extensión a otros tipos de tensores
Las aplicaciones [ y ] permiten establecer isomorfismos entre los espacios de tensores (r, s) (r
contravariantes, s covariantes), y (r0 , s0 ) sobre V , siempre que r + s = r0 + s0 . Por ejemplo, sea el
tensor 2-covariante:
T : V × V −→ R
Podemos construir el 2-contravariante
Te : V ∗ × V ∗ −→ R
como Te(v [ , w[ ) = T (v, w), ∀v, w ∈ V . En coordenadas, se dice que Te se obtiene subiendo los ı́ndices
de T . Explı́citamente, si
T =
n
X
tij φi ⊗ φj ,
i,j=1
Te =
n
X
tkl vk ⊗ vl
k,l=1
entonces:
tkl =
n
X
tij g ik g jl .
i,j=1
Ejercicio 1.1.21 Obténganse expresiones análogas para los tensores (1,1) obtenidos subiendo sólo
el primer ı́ndice y sólo el segundo de T . ¿Cuándo coinciden estos dos tensores?
Contracción métrica
Recordemos asimismo que, dado un tensor (r, s) con r, s ≥ 1 se puede definir un nuevo tensor
eligiendo un ı́ndice covariante, uno contravariante, y contrayendo en ellos. Ası́, por ejemplo, si
1.1. Espacios vectoriales con un producto escalar
13
Pn i
T
(1, 1), su contracción (en los únicos ı́ndices posibles) no es más que
i=1 ti =
Pnes un tensor
i
1
n
i=1 T (ϕ , vi ) donde (v1 , . . . , vn ) es cualquier base de V y (ϕ , . . . , ϕ ) su base dual.
Como en el caso euclı́deo, cualquier producto escalar permite la contracción métrica de cualquier
par de ı́ndices covariantes (o contravariantes) de un tensor. Ası́, por ejemplo, si T es un tensor
2-covariante su contracción métrica se obtiene subiendo uno de sus dos ı́ndices y contrayendo. En
coordenadas:
n
X
g ij T (vi , vj ).
i,j=1
Tensores (1,1) y endomorfismos
Recordemos que existe un isomorfismo natural (independiente de g) entre el espacio de los
tensores (1, 1) y el de endomorfismos sobre V . Concretamente, a cada endomorfismo f se le asigna
el tensor Tf definido por Tf (φ, v) = φ(f (v)), ∀v ∈ V, φ ∈ V ∗ .
Ejercicio 1.1.22 Demuéstrese que para cualquier base B, las matrices de coordenadas asociadas
a f y Tf en en B coinciden.
Fijado el producto escalar g, a cada tensor 2-covariante T podemos también asignarle un endomorfismo fT : basta subir su primer ı́ndice, y tomar el endomorfismo asociado al correspondiente
tensor (1,1). Explı́citamente fT queda caracterizado por:
g(u, fT (v)) = T (u, v), ∀u, v ∈ V.
Ejercicio 1.1.23 Demuéstrese que la contracción métrica de T coincide con la traza de fT .
Es de remarcar que en el caso particular de que T sea un tensor 2-covariante simétrico, el
endomorfismo fT resulta autoadjunto para g.
Ejercicio 1.1.24 Sea V un espacio vectorial, g un producto escalar sobre V , b una forma bilineal
simétrica y fb el correspondiente endomorfismo autoadjunto asociado.
(a) Probar que, para cualquier base B:
M (fb , B) = MB (g)−1 MB (b).
(b) Demostrar que equivalen: (i) El endomorfismo fb es diagonalizable. (ii) Existe una base
ortonormal B de g tal que MB (b) es diagonal. (iii) La matriz MB (g)−1 MB (b) es diagonalizable
(por semejanza).
(c) Justificar por qué si el producto escalar g es euclı́deo entonces todo endomorfismo autoadjunto es diagonalizable, pero esto no es cierto si g es un producto escalar indefinido.
14
1.2.
1.2.1.
Capı́tulo – 1.
Espacios vectoriales lorentzianos. Relatividad Especial
Espacios vectoriales lorentzianos
Conos temporales
Por (V, g) denotaremos un espacio vectorial dotado de un producto escalar lorentziano, o espacio
vectorial lorentziano, de dimensión n ≥ 2.
Existencia
Proposición 1.2.1 El conjunto de los vectores temporales (resp., causales; luminosos si n > 2),
tiene dos partes conexas.
A cada una de estas partes la llamaremos cono temporal, (resp. cono causal; cono luminoso).
Demostración : Sea B = (e1P
, . . . , en ) una base ortonormal de V proporcionada por el teorema
n
de Sylvester, v ∈ V \ {0}, v = i=1 ai ei . Obviamente,
½
v es luminoso ⇔
|a1 | =
p
(a2 )2 + . . . + (an )2
a1 6= 0
p
v es temporal ⇔ |a1 | > (a2 )2 + . . . + (an )2 ,
p
½ 1
|a | ≥ (a2 )2 + . . . + (an )2
v es causal ⇔
a1 6= 0
Luego en cada caso existen dos partes conexas: la correspondiente a a1 < 0 y la correspondiente a
a1 > 0.
Q.E.D.
Definición 1.2.2 Una orientación temporal de un espacio vectorial lorentziano es una elección
de uno de los dos conos temporales (o, equivalentemente, de uno de los causales o luminosos). Al
cono elegido le llamaremos cono futuro, y al otro pasado.
Proposición 1.2.3 Dos vectores temporales v y w caen en el mismo cono temporal si y sólo si
g(v, w) < 0.
Demostración : Podemos suponer sin pérdida de generalidad |v| = 1, y completarlo hasta una
base ortonormal B = {e1 = v, e2 , . . . , en }. Observando que w = −g(v, w)v + g(e2 , w)e2 + . . . +
g(en , w)en , queda claro que v y w están en el mismo cono si y sólo si −g(v, w) > 0.
Q.E.D.
Proposición 1.2.4 Cada cono temporal es convexo (el segmento que une cada dos de sus puntos
también está incluido en él).
15
1.2. Espacios vectoriales lorentzianos
Demostración : Sean v, w temporales en el mismo cono, y a, b > 0 entonces, usando la proposición anterior:
g(v, av + bw) = ag(v, v) + bg(v, w) < 0,
g(av + bw, av + bw) < 0.
De la última desigualdad, av +bw es temporal, y de la primera cae en el mismo cono que v. Q.E.D.
1.2.2.
Desigualdades invertidas
Proposición 1.2.5 (Desigualdad de Cauchy-Schwarz invertida) Si v, w son temporales,
entonces:
(1) |g(v, w)| ≥ |v||w|, además la igualdad se da si y sólo si v, w son colineales.
(2) Si v y w están en el mismo cono, entonces existe un único ϕ ≥ 0 tal que:
g(v, w) = −|v||w| cosh(ϕ)
Demostración : (1) Sea a un número real y w un vector tales que w = av + w con w ⊥ v (es
obvio que esta descomposición siempre puede realizarse, Proposición 1.1.13 (3)). Entonces
g(w, w) = a2 g(v, v) + g(w, w),
por lo que sustituyendo a2 g(v, v) de esta expresión y usando g(w, w) ≥ 0,
g(v, w)2 = a2 g(v, v)2 = g(v, v)(g(w, w) − g(w, w)) ≥ g(v, v)g(w, w) = |v|2 |w|2
Además la igualdad se da si y sólo si g(w, w) = 0, es decir si y sólo si v, w son colineales.
(2) Si v, w están en el mismo cono entonces:
−g(v, w)
≥ 1.
|v||w|
Luego existe un único ϕ ≥ 0 tal que:
cosh(ϕ) =
−g(v, w)
.
|v||w|
Q.E.D.
Proposición 1.2.6 (Desigualdad triangular invertida) Si v, w son temporales que están en
el mismo cono:
|v| + |w| ≤ |v + w|
y la igualdad se da si y sólo si v, w son colineales.
16
Capı́tulo – 1.
Espacios vectoriales lorentzianos. Relatividad Especial
Demostración : Como v, w están en el mismo cono, v + w es temporal y g(v, w) < 0, por lo que:
|v + w|2 = −g(v + w, v + w) = |v|2 + |w|2 + 2|g(v, w)| ≥ |v|2 + |w|2 + 2|v||w| = (|v| + |w|)2 .
Además, la igualdad se da si y sólo si |g(v, w)| = |v||w|, es decir si y sólo si v, w son colineales.
Q.E.D.
1.2.3.
Conos luminosos y causales
A continuación consideramos algunas propiedades análogas de los conos luminosos y causales.
Proposición 1.2.7 Sean u, v vectores luminosos, entonces:
{u, v} es linealmente dependiente ⇔ g(u, v) = 0.
Demostración :
⇒ Obvio.
⇐ Salvo una constante de proporcionalidad para u y otra para v, podemos suponer, sin pérdida
de generalidad, que las coordenadas de los vectores u y v para una base ortonormal B =
{e1 , . . . , en }, son:
n
n
X
X
u = e1 +
ai ei ,
v = e1 +
bi ei .
i=2
i=2
Por tanto, como g(u, v) = g(u, u) = g(v, v) = 0:
1 = a2 b2 + . . . + an bn = (a2 )2 + . . . (an )2 = (b2 )2 + . . . + (bn )2
La desigualdad de Cauchy–Schwarz ordinaria implica entonces que a2 e2 + . . . + an en y b2 e2 +
. . . + bn en son vectores colineales, y que la constante de proporcionalidad es positiva. Como
además |a2 e2 + . . . + an en | = |b2 e2 + . . . + bn en | se tiene u = v.
Q.E.D.
Ejercicio 1.2.8
1.
Sean u, v dos vectores causales independientes, entonces:
u, v caen en el mismo cono causal ⇔ g(u, v) < 0.
2.
Los conos causales son convexos.
1.2. Espacios vectoriales lorentzianos
1.2.4.
17
Subespacios
Definición 1.2.9 Sea (V, g) un espacio vectorial lorentziano. Diremos que un subespacio de V ,
W < V es:
espacial, si g|W es euclı́dea
temporal, si g|W es no degenerada con ı́ndice 1 (esto es, Lorentz si dimW ≥ 2)
luminoso, si g|W es degenerada, (W ∩ W ⊥ 6= 0)
Proposición 1.2.10 Un subespacio W < V es temporal si y sólo si W ⊥ es espacial.
Demostración : Como consecuencia de que g|W es no degenerada, se tiene que g|W ⊥ es no degenerada y viceversa; es decir W ∩ W ⊥ = {0}. Con lo cual V = W ⊕ W ⊥ , y por tanto:
ı́ndice(g) = ı́ndice(g|W ) + ı́ndice(g|W ⊥ ).
De aquı́ se tiene, para la implicación directa, ı́ndice(g|W ⊥ ) = 0, y, para la recı́proca, ı́ndice(g|W ) = 0.
Q.E.D.
Proposición 1.2.11 Sea W < V , dim(W ) ≥ 2. Equivalen:
(1) W es temporal,
(2) W contiene 2 vectores luminosos linealmente independientes,
(3) W contiene 1 vector temporal.
Demostración :
(1) ⇒ (2) Como W es temporal, se considera una base ortonormal B = {e1 , e2 , . . . , ek } de W tal
que e1 es temporal y e2 espacial. Entonces e1 + e2 , y e1 − e2 son dos vectores luminosos
linealmente independientes.
(2) ⇒ (3) Sean v, w dos vectores luminosos linealmente independientes de W , entonces o v + w o
v − w es temporal. Esto se deduce de:
g(v + w, v + w) = g(v, v) + 2g(v, w) + g(w, w) = 2g(v, w),
g(v − w, v − w) = g(v, v) − 2g(v, w) + g(w, w) = −2g(v, w).
Obsérvese que g(v, w) no es cero por la proposición 1.2.7.
18
Capı́tulo – 1.
Espacios vectoriales lorentzianos. Relatividad Especial
(3) ⇒ (1) Sea u un vector temporal de W . Si g|W fuera degenerada, existirı́a un vector del radical
de g|W , z 6= 0 (en particular, z serı́a luminoso). Como u, z son linealmente independientes,
sabemos por el Ejercicio 1.2.8:
½
si u, z están en el mismo cono causal ⇒ g(u, z) < 0
si u, z están en distintos conos causales ⇒ g(u, z) > 0.
Cualquiera de estos dos casos contradice que z está en el radical. Por tanto, g|W debe de ser
no degenerada.
Q.E.D.
Ejercicio 1.2.12 Sea W < V . Equivalen:
1.
W es luminoso.
2.
W contiene un vector luminoso, pero no uno temporal.
3.
La intersección de W con el el conjunto de vectores nulos (luminosos o cero), forma un
subespacio vectorial de dimensión 1.