Lectura 2: Diseño de Sistemas de Control mediante la Respuesta
Anuncio

SISTEMAS DE CONTROL AUTOMÁTICO
DACI-EPN
Lectura 2: Diseño de Sistemas de Control mediante la
Respuesta de Frecuencia
1
Lecturas recomendadas
•
•
2
Cap. 10, pags. 714-759, Sistemas de Control Automático, KUO Benjamín,
Séptima Edición.
Cap. 9, pags. 612-630, Ingeniería de Control Moderna, OGATA Katsuhiko,
Tercera Edición.
Enfoque de la Respuesta de Frecuencia
Es importante señalar que, en el diseño de un sistema de control, por lo general lo más
importante es el desempeño de la respuesta transitoria. En el enfoque de la respuesta en
frecuencia, especificamos el desempeño de la respuesta transitoria en una forma
indirecta. Es decir, el desempeño de la respuesta transitoria se especifica en términos del
margen de fase, el margen de ganancia y la magnitud del pico de resonancia, que
ofrecen una estimación a grandes rasgos del amortiguamiento del sistema, la frecuencia
de cruce de ganancia, la frecuencia de resonancia y el ancho de banda, que ofrecen una
estimación a grandes rasgos de la velocidad de la respuesta transitoria y las constantes
de error estático, que aportan la precisión en estado estable. Aunque la correlación entre
la respuesta transitoria y la respuesta en frecuencia es indirecta, las especificaciones en
el dominio de la frecuencia se cumplen adecuadamente en el enfoque de las trazas de
Bode.
Después de diseñar el lazo abierto mediante el método de la respuesta en frecuencia, se
determinan los polos y los ceros en lazo cerrado. Deben verificarse las características de
la respuesta transitoria para saber si el sistema diseñado satisface los requerimientos en
el dominio del tiempo. De no ser así, debe modificarse el compensador y luego repetirse
el análisis hasta obtener un resultado satisfactorio.
El diseño en el dominio de la frecuencia es sencillo y directo. La gráfica de la respuesta
en frecuencia indica en forma clara la manera en la que debe modificarse el sistema,
aunque no sea posible hacer una predicción cuantitativa exacta de las características de
la respuesta transitoria.
Básicamente hay dos enfoques de diseño en el dominio de la frecuencia. Uno es el
enfoque de la traza polar y el otro es el enfoque de las trazas de Bode. Cuando se añade
un compensador, la traza polar no conserva su forma original, por lo que es necesario
dibujar una nueva traza polar, esto toma tiempo y, por tanto, no es conveniente. En
cambio, agregar las trazas de Bode del compensador a las trazas de Bode originales es
muy simple y, por tanto, graficar las trazas de Bode completas es un asunto sencillo.
Asimismo, si varía la ganancia en lazo abierto, la curva de magnitud se mueve hacia
arriba o hacía abajo sin que se modifique la pendiente de la curva, y la curva de fase no
cambia. Por tanto, para propósitos de diseño, es mejor trabajar con las trazas de Bode.
En un procedimiento común de las trazas de Bode, primero se ajusta la ganancia en lazo
abierto para cumplir el requerimiento sobre la precisión en estado estable. A
continuación se grafican las curvas de magnitud y fase en el lazo abierto sin compensar
(con la ganancia en lazo abierto recién ajustada). Si no se satisfacen las especificaciones
del margen de fase y del margen de ganancia, se determina un compensador
conveniente que vuelva a dar forma a la función de transferencia en lazo abierto.
Lectura 1: Diseño de Sistemas de Control mediante la RF
1
SISTEMAS DE CONTROL AUTOMÁTICO
DACI-EPN
3
Compensador o Red de Adelanto
En una Red de Adelanto: p > z
p
jω
z
x
o
1
1
T
αT
σ
1
s+z
T = αK Ts + 1
GC = K C
= KC
C
1
s+ p
αTs + 1
s+
αT
s+
0 <α <1
entonces:
⇒
donde: α y T se determinan a partir de la deficiencia de ángulo, mientras que K C se
determina a partir del requisito de la ganancia en lazo abierto.
El diagrama POLAR del Compensador de Adelanto, viene dado por:
1
T
GC = 1 ⋅
1
s+
αT
s+
→ G C ( jω ) =
j ωT + 1
1
j ωT +
αT
; 0 <α <1
lim GC ( jω ) = α
donde:
ω →0
lim GC ( jω ) = 1
ω →∞
ℑm{GC ( jω)}
ω =ωm •
radio =
φ Am
0
ω =0
1− α
2
α
ω →∞
1
ℜe{GC ( jω)}
1+ α
2
1−α
El ángulo máximo viene dado por: Senφ A = 1 + α
El valor mínimo de α normalmente se toma alrededor de 0.05, para lo cual el adelanto
de fase máximo del Compensador de Adelanto es de 65º.
Lectura 1: Diseño de Sistemas de Control mediante la RF
2
SISTEMAS DE CONTROL AUTOMÁTICO
DACI-EPN
1
1
El diagrama de BODE del Compensador de Adelanto, para α = 0.1 , z = T y p = αT ,
viene dado por:
GC ( jω ) db
0 [db]
1
T
10
T
10
T
ω
•
−20 [db]
z
ωm
p
α = 0.1
∠GC ( jω)°
90°
45°
•
φ Am
ω
0°
− 45 °
donde:
•
ωm
1
1
resulta ser la media geométrica de las frecuencias de esquina: T y αT ,
por lo que:
1
1
1
⇒ ωm =
20 log ω m = 12 ⋅ 20 log + 20 log
αT
T
T α
Por otro lado, al añadir el Compensador en Adelanto, éste desplaza la frecuencia de
cruce de ganancia hacia la derecha, disminuyendo el margen de fase, por lo que es
necesario adicionar de 5 º a 12 º al ángulo de adelanto de fase
φA .
φ A = M F deseado − M F original + 10°
donde:
M F original = 180 ° + ∠G P ( jω )° se visualiza en el diagrama de BODE.
Lectura 1: Diseño de Sistemas de Control mediante la RF
3
SISTEMAS DE CONTROL AUTOMÁTICO
Senφ A =
1−α
1+ α
DACI-EPN
α=
⇒
1 − Senφ A
1 + Senφ A
También, la cantidad en la modificación de la curva de magnitud en ω =
20 log
1
α
T α
, debido
Ts + 1
αTs + 1 , es:
a la inclusión del término
jT ω + 1
jα T ω + 1 ω =
1
1
j
=
1
T α
α
1
jα
α
+1
+1
=
1
α
⇒
= −10 log α = M [db]
La nueva frecuencia del corte ω C (en el diagrama de BODE) sirve para determinar el
valor de T, esto es:
ωC =
1
⇒
T α
T=
1
ωC α
Además:
1
T = αK Ts + 1
GC = K C
C
1
αTs + 1
s+
αT
s+
GC ( jω ) =
jωT + 1
=
jωαT + 1
1+ j
1+ j
→
αK C = 1 ⇒ K C =
1
α
ω
1
T
ω
1
αT
Finalmente, diseñar una Red de Adelanto, usando la Respuesta de Frecuencia, es
calcular los valores de α y T , mediante una componente analítica y una componente
gráfica.
Procedimiento de diseño de redes de adelanto mediante la respuesta de frecuencia
Ts + 1
1. Suponga el siguiente compensador de adelanto: GC (s ) = K
→ K = K Cα
αTs + 1
2. Determine la ganancia K que satisfaga el requerimiento sobre la constante de error
estático solicitado.
3. Con esta ganancia K, trace el diagrama de Bode en lazo abierto y calcule el MF.
Lectura 1: Diseño de Sistemas de Control mediante la RF
4
SISTEMAS DE CONTROL AUTOMÁTICO
DACI-EPN
4. Determine el ángulo de fase φ necesario a agregar al sistema y calcule α a partir de
la ecuación de φm.
5. Establezca la frecuencia a la cual la magnitud del sistema no compensado es igual a
. Esta será la nueva frecuencia. de cruce de ganancia y corresponde
− 20 log 1
α
1
a ωm =
.
αT
6. Determine las frecuencias de esquina del compensador (1/T y 1/(αT)) y calcule el
valor de KC.
7. Verifique el MG para asegurar que sea satisfactorio.
Ejemplo de diseño
R(s) +
-
Y(s)
2
s(s + 1)
Gc(s)
Para este sistema se desea diseñar un compensador de manera que: KV ≥ 20 , MF ≥ 50º
y MG ≥ 10dB.
Ts + 1
Escogiendo una red de adelanto se tiene: Gc (s ) = K cα
, 0 <α <1
α Ts + 1
Y haciendo que K = K cα , se ajusta el valor de K para cumplir con la especificación del
valor de KV, obteniendo:
2
Ts + 1
2
= lim sK
= 2 K = 20 → K = 10
KV = lim sGC (s )
s →0
s (s + 1) s →0 αTs + 1 s (s + 1)
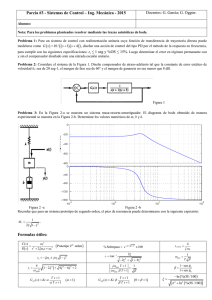
A continuación se obtiene el Diagrama de Bode en lazo abierto de:
2K
20
=
s (s + 1) s (s + 1)
Bode Diagram
Magnitude (dB)
100
50
System: sys
Frequency (rad/sec): 6.69
Magnitude (dB): -7.09
0
Phase (deg)
-50
-90
System: sys
Phase Margin (deg): 12.8
Delay Margin (sec): 0.0504
At frequency (rad/sec): 4.42
Closed Loop Stable? Yes
-135
-180
-2
10
-1
10
0
10
1
10
2
10
Frequency (rad/sec)
Lectura 1: Diseño de Sistemas de Control mediante la RF
5
SISTEMAS DE CONTROL AUTOMÁTICO
DACI-EPN
A partir de este diagrama se determina que el MF = 12,8º y el MG = ∞. Como se
requiere de un MF de al menos 50º sin alterar el valor de K, la red de adelanto debe
contribuir con el ángulo de fase adicional de 42,2º (se han agregado 5º para compensar
el cambio en la frecuencia de cruce de ganancia).
Entonces de la fórmula de φm se tiene:
1−α
1 − sin (42,2º )
sin (42,2º ) =
→ α=
→ α = 0,196
1+α
1 + sin (42,2º )
= −20 log 1
= −7,069dB y como se observa en el
Por lo que: − 20 log 1
α
0,196
diagrama de magnitud esta ganancia ocurre aproximadamente a la frecuencia de 6,68
rad/s.
Esta es la nueva frecuencia de cruce de ganancia. Entonces de la fórmula de ωm se
1
1
1
obtiene: ωm =
= 6,68 rad
→
= 6,68 0,196 = 2.96 y
= 15,07
s
αT
T
αT
Y calculando el valor de KC
10
K = K Cα = 10 → K C =
= 50,92
0,196
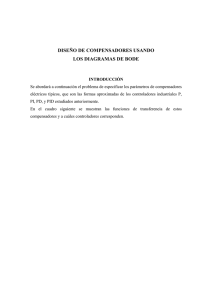
Finalmente el compensador diseñado es
s + 2,96
Gc (s ) = 50,92
s + 15,07
(
)
Sist. sin compensar
Bode Diagram
Compensador
100
Sist. compensado
Magnitude (dB)
50
0
-50
-100
-150
45
Phase (deg)
0
System: tot
Phase Margin (deg): 50.7
Delay Margin (sec): 0.132
At frequency (rad/sec): 6.68
Closed Loop Stable? Yes
-45
-90
-135
-180
-2
10
-1
10
0
10
1
10
2
10
3
10
Frequency (rad/sec)
4
Compensador o Red de Atraso
Su función principal es proporcionar una atenuación en el rango de las frecuencias altas
a fin de aportar un margen de fase suficiente al sistema. Es esencialmente un filtro pasabajos.
Lectura 1: Diseño de Sistemas de Control mediante la RF
6
SISTEMAS DE CONTROL AUTOMÁTICO
DACI-EPN
Diagrama de Nyquist
Diagrama de Bode (para β=10 y KC=1)
Procedimiento de diseño de redes de atraso mediante la respuesta de frecuencia
Ts + 1
→ K = KC β
1. Suponga el siguiente compensador de atraso: GC (s ) = K
βTs + 1
2. Determine la ganancia K que satisfaga el requerimiento sobre la constante de error
estático solicitado.
3. Con esta ganancia K, trace el diagrama de Bode en lazo abierto y calcule el MF.
4. Si el sistema no compensado no satisface la especificación de MF, encuentre el
punto de frecuencia en el cual el ángulo de fase del sistema en lazo abierto sea igual
a -180º más el MF requerido (generalmente se aumentan de 5º a 12º). Esta será la
nueva frecuencia de cruce de ganancia.
5. Para evitar los efectos nocivos del atraso de fase, el polo y el cero del compensador
deben ubicarse mucho más abajo que la nueva frecuencia de cruce de ganancia
(hasta una década por debajo).
6. Determine la atenuación necesaria para bajar la curva de magnitud a 0dB en la
nueva frecuencia de cruce de ganancia. Esta atenuación es de − 20 log(β ) .
7. Usando el valor de K y de β se determina el valor de KC.
Ejemplo de diseño
R(s) +
-
Gc(s)
2
s(s + 1)
Y(s)
Para este sistema se desea diseñar un compensador de manera que: KV ≥ 20 , MF ≥ 50º
y MG ≥ 10dB.
Ts + 1
Escogiendo una red de atraso se tiene: Gc (s ) = K c β
, β >1
βTs + 1
Y haciendo que K = K c β , se ajusta el valor de K para cumplir con la especificación del
valor de KV, obteniendo:
Lectura 1: Diseño de Sistemas de Control mediante la RF
7
SISTEMAS DE CONTROL AUTOMÁTICO
DACI-EPN
2
Ts + 1
2
= lim sK
= 2 K = 20 → K = 10
K V = lim sGC (s )
s →0
βTs + 1 s(s + 1)
s (s + 1) s →0
A continuación se obtiene el Diagrama de Bode en lazo abierto de:
2K
20
=
s (s + 1) s (s + 1)
Bode Diagram
Magnitude (dB)
100
50
System: sys1
Frequency (rad/sec): 0.572
Magnitude (dB): 29.6
0
Phase (deg)
-50
-90
System: sys1
Phase Margin (deg): 12.8
Delay Margin (sec): 0.0504
At frequency (rad/sec): 4.42
Closed Loop Stable? Yes
System: sys1
Frequency (rad/sec): 0.571
Phase (deg): -120
-135
-180
-2
10
-1
10
0
10
1
10
2
10
Frequency (rad/sec)
A partir de este diagrama se determina que el MF = 12,8º y el MG = ∞. Como se
requiere de un MF de al menos 50º sin alterar el valor de K. Por esto se determina la
frecuencia en la cual el ángulo de fase sea de -120º para obtener un MF de 60º. Del
gráfico de fase se observa que esta frecuencia es de 0,571 rad/s.
Por lo que 0,571 rad/s será la nueva frecuencia de cruce de ganancia. A esta frecuencia
se tiene una magnitud de 29,6dB, entonces el compensador de atraso deberá cumplir
que:
− 20 log(β ) = −29.6dB → β = 10
29.6
20
= 30,2
Como la frecuencia de esquina 1/T debe estar entre una década y una octava por debajo
1
1
de la nueva frecuencia de cruce de ganancia se tiene que: = 0,1 y
= 0,0033
T
βT
10
Y calculando el valor de KC K = K C β = 10 → K C =
= 0,33
30,2
s + 0,1
Finalmente el compensador diseñado es Gc (s ) = 0,33
s + 0,0033
Lectura 1: Diseño de Sistemas de Control mediante la RF
8
SISTEMAS DE CONTROL AUTOMÁTICO
DACI-EPN
Sist. no compensado
Bode Diagram
Compensador
150
Sist. compensado
Magnitude (dB)
100
50
0
-50
-100
0
System: tot
Phase Margin (deg): 50.4
Delay Margin (sec): 1.52
At frequency (rad/sec): 0.579
Closed Loop Stable? Yes
Phase (deg)
-45
-90
-135
-180
-4
10
-3
10
-2
10
-1
10
0
10
1
10
2
10
Frequency (rad/sec)
5
Comparación de las compensaciones de atraso, de adelanto y de
atraso-adelanto.
1. La compensación de adelanto proporciona el resultado deseado mediante su
contribución al adelanto de la fase, en tanto que la compensación de atraso logra
el resultado a través de su propiedad de atenuación en frecuencias altas. (En
algunos problemas de diseño, la compensación de atraso y la compensación de
adelanto pueden satisfacer las especificaciones.)
2. La compensación de adelanto suele usarse para mejorar los márgenes de
estabilidad. La compensación de adelanto produce una frecuencia de cruce de
ganancia más alta que la que puede obtenerse con la compensación de atraso. La
frecuencia de cruce de ganancia más alta significa un mayor ancho de banda. Un
ancho de banda grande significa una reducción en el tiempo de asentamiento. El
ancho de banda de un sistema con compensación de adelanto siempre es mayor
que la de otro con compensación de atraso. Por tanto, si se desea un ancho de
banda grande o una respuesta rápida, debe emplearse la compensación de
adelanto. Sin embargo, si hay señales de ruido presentes, tal vez no sea
conveniente un ancho de banda grande, dado que éste hace al sistema más
susceptible a las señales de ruido, debido al incremento en la ganancia de
frecuencia alta.
3. La compensación de adelanto requiere de un incremento adicional en la
ganancia a fin de compensar la atenuación inherente a la red de adelanto. Esto
significa que la compensación de adelanto requiere de una ganancia mayor que
la que requiere la compensación de atraso. Una ganancia mayor casi siempre
implica un mayor espacio, mayor peso y un costo más alto.
4. La compensación de atraso reduce la ganancia del sistema en las frecuencias
más altas sin reducirla en las frecuencias mas bajas. Dado que el ancho de banda
del sistema se reduce, éste responde a una velocidad más lenta. Debido a la
Lectura 1: Diseño de Sistemas de Control mediante la RF
9
SISTEMAS DE CONTROL AUTOMÁTICO
DACI-EPN
ganancia reducida en la frecuencia alta, la ganancia total del sistema se
incrementa y, por tanto, también se incrementa la ganancia de frecuencia baja y
mejora la precisión en estado estable. Asimismo, los ruidos de frecuencia alta
implícitos en el sistema se atenúan.
5. Si se desean respuestas rápidas y suficiente precisión estática, se usa un
compensador de atraso-adelanto. Éste incrementa la ganancia de frecuencias
bajas (lo cual significa un mejoramiento en la precisión en estado estable) y, al
mismo tiempo, se incrementa el ancho de banda y los márgenes de estabilidad
del sistema.
6. Aunque con los compensadores de adelanto, de atraso o de atraso-adelanto se
realiza una mayor cantidad de tareas prácticas de compensación, para los
sistemas complicados, una compensación simple mediante estos compensadores
tal vez no produzca resultados satisfactorios. En este caso, deben emplearse
diferentes compensadores con distintas configuraciones de polos y ceros.
La figura siguiente muestra una curva de respuesta escalón unitario y una curva de
respuesta rampa unitaria de un sistema no compensado. Las curvas comunes de
respuesta escalón unitario y rampa unitaria para el sistema compensado mediante una
red de adelanto, de atraso y de atraso-adelanto se observan en las figuras (b), (c) y (d),
respectivamente. El sistema con un compensador de adelanto presenta una respuesta
más rápida, en tanto que aquél con un compensdor de atraso presenta la respuesta más
lenta, pero con un notable mejoramiento en la respuesta rampa unitaria. El sistema con
un compensador de atraso-adelanto logra un equilibrio y un mejoramiento razonable
tanto en la respuesta transitoria como en la respuesta en estado estable. Las curvas de
respuesta mostradas representan la naturaleza de los mejoramientos que se esperan al
usar los distintos tipos de compensadores.
Lectura 1: Diseño de Sistemas de Control mediante la RF
10