Logica Difusa - Universidad Nacional Jorge Basadre Grohmann
Anuncio

Universidad Nacional Jorge Basadre Grohmann
Facultad de Ciencias
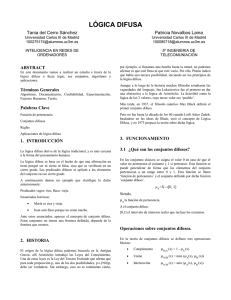
LOGICA DIFUSA
MSc. Roberto Supo Hallasi
Tacna – Perú
2003
1
INDICE
CAPITULO I
1. INTRODUCCION
2. OBJETIVOS
3. HISTORIA
a. Bivalencia
b. Multivalencia
c. Logica Difusa
4. Conceptos Basicos
a. Conjunto Difuso
b. Conceptos imprecisos
c. Operaciones
d. Las etiquetas lingüísticas y operadores
CAPITULO II
1. DIREFENCIA DE CONJUNTOS CRIP Y CONJUNTOS DIFUSOS
a. Conjuntos Crisps
b. Conjuntos Difusos
2. REPRESENTAION DE CONJUNTOS DIFUSOS
3. COMPONENTES DEL CONJUNTO DIFUSO
4. PROPIEDADES
a. Altura
b. Normalizacion
c. Dominio
d. Universo de Discusión
e. Soporte del Conjunto
f. Observación
g. Conjunto -cut
5. FORMATOS
a. Triangular
b. Funcion
c. Funcion s
d. Funcion Gausiana
e. Funcion Trapezoidal
f. Funcion Trapecio Extendido
CAPITILO III
1. SISTEMA DE INFERENCIA FUZZY
a. Base de reglas
b. Modulo de inferencia
c. Modulo de fuzzificacion
d. Modulo de defuzzificador
2. CUANDO Y COMO UTILIZAR LOGICA DIFUSA
CONCLUSIONES
2
CAPITULO I
1. INTRODUCCION
La lógica borrosa es una ciencia que tiene por objetivo el
estudio de las leyes del raciocino y se preocupa con los
principios formales del raciocino aproximado, busca modelar
los modos imprecisos del raciocino. Es una rama de la
inteligencia artificial que se funda en el concepto “todo es
cuestión de grado”, lo cual permite manejar información vaga
o de difícil especificación si quisiéramos hacer cambiar con
esta información el funcionamiento oe el estado de un sistema
específico. Es entonces posible con la lógica difusa gobernar
un sistema por medio de reglas de ‘sentido común’ las cuales
se refieren a cantidades indefinidas.
Las reglas involucradas en un sistema difuso, pueden ser
aprendidas con sistemas adoptivos que aprenden al ‘observar’
como operan las personas los dispositivos reales, o estas
reglas pueden también ser formuladas por un experto
humano. En general la lógica difusa se aplica tanto a sistemas
de control como para modelar cualquier sistema continuo de
ingeniería, física, biología o economía.
La lógica difusa es entonces definida como un sistema
matemático que modela funciones no lineales, que convierte
unas entradas en salidas acordes con los planteamientos
lógicos que usan el razonamiento aproximado.
Se fundamenta en los denominados conjuntos borrosos y un
sistema de inferencia borroso basado en reglas de la forma
“SI ….. ENTONCES……”, donde los valores lingüísticos de la
premisa y el consecuente están definidos por conjuntos
borrosos, es así como las reglas siempre convierten un
conjunto borroso en otro.
2. OBJETIVO
El objetivo de la lógica difusa es ofrecer los fundamentos para
efectuar el raciocino aproximado, con proposiciones
imprecisas, usando la teoría de conjuntos nebulosos como
herramienta principal.
3
3. HISTORIA
A) Bivalencia: Desde Aristóteles, a lógica clásica es basada
en bivalencia verdadero (V) y falso (F)
B) Multivalencia: Desenvuelta por Lukasiewicz para lidar con
el principio de inserteza en la mecánica cuántica, V, F, IN
C) Logica Difusa: Los conjuntos difusos fueron introducidos
por primera vez en 1965; la creciente disciplina de la
lógica difusa provee por sí misma un medio para acoplar
estas tareas. En cierto nivel, la lógica difusa puede ser
vista como un lenguaje que permite trasladar sentencias
sofisticadas en lenguaje natural a un lenguaje matemático
formal. Mientras la motivación original fue ayudar a
manejar aspectos imprecisos del mundo real, la práctica
temprana de la lógica difusa permitió el desarrollo de
aplicaciones
prácticas.
Aparecieron
numerosas
publicaciones que presentaban los fundamentos básicos
con aplicaciones potenciales. Esta frase marcó una fuerte
necesidad de distinguir la lógica difusa de la teoría de
probabilidad. Tal como la entendemos ahora, la teoría de
conjuntos difusos y la teoría de probabilidad tienen
diferentes tipos de incertidumbre.
En 1994, la teoría de la lógica difusa se encontraba en la
cumbre, pero esta idea no es nueva, para muchos, estuvo
bajo el nombre de lógica difusa durante 25 años, pero sus
orígenes se remontan hasta 2,500 años. Aún Aristóteles
consideraba que existían ciertos grados de veracidad y
falsedad. Platón había considerado ya grados de
pertenencia.
En el siglo XVIII el filósofo y obispo anglicano Irlandés,
George Berkeley David Hume describieron que el núcleo de
un concepto atrae conceptos similares. Hume en particular,
creía en la lógica del sentido común, el razonamiento
basado en el conocimiento que la gente adquiere en forma
ordinaria mediante vivencias en el mundo. En Alemania,
Immanuel Kant, consideraba que solo los matemáticos
podían proveer definiciones claras, y muchos principios
contradictorios no tenían solución. Por ejemplo la materia
4
podía ser dividida infinitamente y al mismo tiempo no
podía ser dividida infinitamente. Particularmente la escuela
americana de la filosofía llamada pragmatismo fundada a
principios de siglo por Charles Sanders Peirce, cuyas ideas
se fundamentaron en estos conceptos, fue el primero en
considerar ''vaguedades'', más que falso o verdadero,
como forma de acercamiento al mundo y a la forma en que
la gente funciona.
La idea de que la lógica produce contradicciones fue
popularizada por el filósofo y matemático británico
Bertrand Russell, a principios del siglo XX. Estudio las
vaguedades del lenguaje, concluyendo con precisión que la
vaguedad es un grado. El filosofo austriaco Ludwing
Wittgenstein estudió las formas en las que una palabra
puede ser empleada para muchas cosas que tienen algo en
común. La primera lógica de vaguedades fue desarrollada
en 1920 por el filósofo Jan Lukasiewicz, visualizó los
conjuntos con un posible grado de pertenencia con valores
de 0 y 1, después los extendió a un número infinito de
valores entre 0 y 1. En los años sesentas, Lofti Zadeh
inventó la lógica difusa, que combina los conceptos de la
lógica y de los conjuntos de Lukasiewicz mediante la
definición de grados de pertenencia.
4. CONCEPTOS BASICOS:
A) Conjuntos difusos.
La mayoría de los fenómenos que encontramos cada día
son imprecisos, es decir, tienen implícito un cierto grado
de difusidad en la descripción de su naturaleza. Esta
imprecisión puede estar asociada con su forma, posición,
momento, color, textura, o incluso en la semántica que
describe lo que son. En muchos casos el mismo concepto
puede tener diferentes grados de imprecisión en diferentes
contextos o tiempo. Un día calido en invierno no es
exactamente lo mismo que un día calido en primavera. La
definición exacta de cuando la temperatura va de templada
a caliente es imprecisa -no podemos identificar un punto
simple de templado, así que emigramos a un simple grado,
la temperatura es ahora considerada caliente. Este tipo de
imprecisión o difusidad asociado continuamente a los
fenómenos es común en todos los campos de estudio:
sociología,
física,
biología,
finanzas,
ingeniería,
oceanografía, psicología, etc.
5
B) Conceptos imprecisos.
Aceptamos la imprecisión como una consecuencia natural
de ''la forma de las cosas en el mundo''. La dicotomía entre
el rigor y la precisión del modelado matemático en todo los
campos y la intrínseca incertidumbre de ''el mundo real''
no es generalmente aceptada por los científicos, filósofos y
analistas de negocios. Nosotros simplemente aproximamos
estos eventos a funciones numéricas y escogemos un
resultado en lugar de hacer un análisis del conocimiento
empírico. Sin embargo procesamos y entendemos de
manera implícita la imprecisión de la información
fácilmente. Estamos capacitados para formular planes,
tomar decisiones y reconocer conceptos compatibles con
altos niveles de vaguedad y ambigüedad. considere las
siguientes sentencias:
• La temperatura está caliente
• La inflación actual aumenta rápidamente
• Los grandes proyectos generalmente tardan mucho
• Nuestro precios están por abajo de los precios de la
competencia
• IBM es una compañía grande y agresiva
• Alejandro es alto pero Ana no es bajita
Estas proposiciones forman el núcleo de nuestras
relaciones con ''la forma de las cosas en el mundo''. Sin
embargo, son incompatibles con el modelado tradicional y
el diseño de sistemas de información. Si podemos
incorporar estos conceptos logramos que los sistemas sean
potentes y se aproximen más a la realidad.
Pero, es la imprecisión o fusificación un concepto artificial
utilizado para aumentar o disminuir en uno o más las
propiedades de los fenómenos? o es una parte íntrisica del
fenómeno en sí mismo?.
Esta es una pregunta importante ya que es la parte
fundamental de las medidas de la teoría difusa. Como
veremos la fusificación es independiente de cualquier
capacidad para medir, ya que un conjunto difuso es un
conjunto que no tiene límites bien definidos.
Un conjunto difuso tiene muchas propiedades intrínsecas
que afectan la forma del conjunto, su uso y como participa
en un modelo. Las propiedades más importantes de un
conjunto difuso son las concernientes a las dimensiones
verticales del conjunto difuso (altura y normalización) y las
dimensiones horizontales ( conjunto soporte y cortes
"alpha").
6
La altura de un conjunto difuso es como máximo un grado
de pertenencia y es una cota cercana al concepto de
normalización. La superficie de la región de un conjunto
difuso es el universo de valores. Todos estos conceptos se
tratarán más adelante.
Def. Sea U un universo de discusión con su elemento
genérico denotado por u. Luego un subconjunto difuso A
de U está caracterizado por una función de pertenencia
:U
[0,1] que asocia a cada elemento u de U un número
(u) que representa el grado de pertenencia de u en A. A
.
se denota como el conjunto de pares ordenados
Es decir un conjunto difuso A se considera como un
conjunto de pares ordenados, en los que el primer
componente es un número en el rango [0,1] que denota el
grado de pertenencia de un elemento u de U en A, y el
segundo componente especifica precisamente quién es ése
elemento de u. En general los grados de pertenencia son
subjetivos en el sentido de que su especificación es una
cuestión objetiva. Se debe aclarar que aunque (u) puede
interpretarse como el grado de verdad de que la expresión
''u A'' sea cierta, es más natural considerarlo simplemente
como un grado de pertenencia.
Puede notarse además que:
a)
Mientras más próximo está (u) a el valor 1, se dice
que u pertenece más a A (de modo que 0 y 1 denotan
la no pertenencia y la pertenencia completa,
respectivamente).
b)
Un conjunto en el sentido usual es también difuso pues
u
,es
su función característica
también una función
:u
[0,1]; o sea que los
conjuntos difusos son una generalización de los
conjuntos usuales.
Ejemplo: Sea U =
, entonces los
conjuntos definidos a continuación son difusos:
• POCOS = (.4/1, .8/2, 1/3, .4/4)
• VARIOS = (.5/3, .8/4, 1/5, 1/6, .8/7, .5,8)
• MUCHOS=(.4/6, .6/7, .8/8, .9/9,1/10)
Note que el elemento 4 pertenece en grado .4 al conjunto
POCOS, en grado .8 al conjunto VARIOS y en grado .0 a
MUCHOS. Zadeh ha hecho algunas extensiones a los
conceptos de conjuntos difusos ordinarios que se han
7
explicado; por ejemplo los conjuntos difusos de nivel-m y
los conjuntos difusos tipo-n. Para un conjunto difuso de
nivel-m se considera como su universo de discusión al
conjunto
de
conjuntos
difusos
de
nivel-(m-1),
sobreentendiendo que los conjuntos difusos de nivel-1 son
conjuntos difusos ordinarios. Para los conjuntos difusos
tipo-n, los valores de las funciones de pertenencia son
conjuntos difusos de tipo-(n-1) del intervalo [0,1] (en
lugar de ser puntos de [0,1]). También los conjuntos
difusos tipo-1 son equivalentes a los conjuntos difusos
ordinarios.
C) Operaciones.
En la lógica Booleana tradicional, los conjuntos son
considerados como sistemas bivalentes con sus estados
alternando entre inclusión y exclusión. La característica de
la función discriminante refleja este espacio bivaluado:
Esto indica que la función de pertenencia para el conjunto
A es cero si x no es un elemento en A y la función de
pertenencia es
si x es un elemento en A. Dado que
existen solamente dos estados, la transición entre estos
dos estados es siempre inmediata. La pertenencia de estos
conjuntos está siempre totalmente categorizada y no
existe ambigüedad o dicotomia acerca de la pertenencia.
Existen 4 operaciones básicas de conjuntos en esta lógica:
unión, intersección, complemento y unión exclusiva.
Al igual que en los conjuntos convencionales, existen
definiciones específicas para combinar y especificar nuevos
conjuntos difusos. Este conjunto de funciones teóricas
provee las herramientas fundamentales de la lógica.
En el caso usual, con las operaciones comunes de
intersección, unión y complemento, el conjunto de
conjuntos de U forman un álgebra booleana, es decir se
cumplen las condiciones de asociatividad, conmutatividad,
elementos
neutros,
idempotencia,
absorción,
distributividad, complemento y las leyes de Morgan.
Las tres operaciones mencionadas se pueden extender de
varias formas a conjuntos difusos, de modo que al
restringirlas a los conjuntos usuales, coincidan con las
comunes. Estas extensiones resultantes satisfacen en
forma general sólo a algunas de las condiciones listadas
anteriormente, y para mantener la vigencia de alguna,
8
será obligatorio sacrificar a otras. En el sistema se optó por
extender las operaciones en el sentido clásico, es decir,
dados dos conjuntos difusos A y B, se definen las
operaciones extendidas de la siguiente forma:
Intersección:
(u)=min( (u), (u)) u
Unión:
(u)=max( (u), (u)) u
Complemento:
(u)=1- (u), (u)) u
Dado que los conjuntos difusos no se particionan en el
mismo sentido que los conjuntos Booleanos, estas
operaciones son aplicadas al nivel de pertenencia, como
una consecuencia de los conjuntos difusos. Decidir si un
valor es o no es miembro de cualquier conjunto difuso en
particular, requiere algunas nociones de cómo esta
construido el conjunto, del universo y de los límites de
éste.
Podemos
definir
además
operaciones
más
especializadas.
Producto:
(u)= (u) (u) u
Normalización:
Si
denota al supremo de la función de pertenencia
en el universo de discusión, es decir: = Sup
(u), u
.Un conjunto difuso A se dice ser normal si
=1, y en
otro caso es subnormal. Dado que un conjunto difuso
por
,
subnormal A puede normalizarse dividiendo
entonces:
(u)=
uy
0
Concentración.
El resultado de aplicar un concentrador a un conjunto
difuso A, es un conjunto difuso tal que la reducción en
la magnitud del grado de pertenencia de u en A es
relativamente pequeño para aquellas u que tienen un
alto grado de pertenencia en A, y relativamente grande
para las u con baja pertenencia. Específicamente se
asumirá que ésta operación tiene el efecto de elevar al
cuadrado la función de pertenencia de A, o
sea:
Al elevar al cuadrado los
valores de las funciones de pertenencia se cumple el
efecto de la concentración, pues los valores de
pertenencia grandes disminuyen relativamente poco en
comparación con los pequeños. La concentración
9
desenfatiza los miembros centrales de un conjunto
difuso.
Dilatación.
Tiene el efecto opuesto a la concentración; es decir, el
aumento en el grado de pertenencia para los elementos
que tienen un grado alto es relativamente menor que
aquellos
que
tienen
valores
pequeños.
Intensificación contrastante.
Se emplea para intensificar el contraste existente entre
los elementos que tienen un valor de pertenencia
pequeño y los que tienen un valor de pertenencia
grande; específicamente incrementa los valores de
que están sobre 0.5 y disminuye los que están
debajo de este umbral.
para
0.5
para
0.5
y
Combinación convexa.
Es una operación n-aria que combina un conjunto de n
conjuntos difusos A ,...,A en uno solo, A. Este conjunto
difuso A es una combinación ponderada de A ,...,A en el
sentido de que la función de pertenencia de A está
relacionada con las de A ,...,A por la expresión:
donde: 0
i=1,...,n, y
u
D) Las etiquetas lingüísticas y operadores.
El centro de las técnicas de modelado difuso es la idea de
variable lingüística. Desde su raíz, una variable lingüística
es el nombre de un conjunto difuso. Si tenemos un
conjunto difuso llamado ''largo'' éste es una simple
variable lingüística y puede ser empleada como una reglabase en un sistema basado en la longitud de un proyecto
en particular:
Si duración-proyecto es largo
entonces
la-terminación-de-tareas
es
DECRECIENTE;
Una variable lingüística encapsula las propiedades de
aproximación o conceptos de imprecisión en un sistema y
da una forma de computar adecuada. Esto reduce la
aparente complejidad de describir un sistema que debe
concordar con su semántica. Una variable lingüística
siempre representa un espacio difuso.
Lo importante del concepto de variable lingüística es su
estimación de variable de alto orden más que una variable
10
difusa. En el sentido de que una variable lingüística toma
variables difusas como sus valores.
En el campo de la semántica difusa cuantitativa al
significado de un término "x" se le representa como un
conjunto difuso M(x) del universo de discusión. Desde este
punto de vista, uno de los problemas básicos en semántica
es que se desea calcular el significado de un término
compuesto x=x , x ,...,x partiendo del conocimiento del
significado de sus componentes atómicos x .
La idea básica sugerida por Zadeh es que una etiqueta
lingüística tal como ''muy'', ''más o menos'', ''ligeramente'',
etc... puede considerarse como un operador que actúa
sobre un conjunto difuso asociado al significado de su
operando. Por ejemplo en el caso de un término
compuesto ''muy alto'', el operador ''muy'' actúa en el
conjunto difuso asociado al significado del operando ''alto''.
Una representación aproximada para una etiqueta
lingüística se puede lograr en términos de combinaciones o
composiciones de las operaciones básicas explicadas en la
sección anterior. Es importante aclarar que se hará mayor
énfasis en que estas representaciones se proponen
principalmente para ilustrar el enfoque, más que para
proporcionar una definición exacta de las etiquetas
lingüísticas. Zadeh también considera que las etiquetas
lingüísticas pueden clasificarse en dos categorías que
informalmente se definen como sigue:
• Tipo I: las que pueden representarse como operadores
que actúan en un conjunto difuso: ''muy'', ''más o
menos'', ''mucho'', ''ligeramente'', ''altamente'',
''bastante'', etc. y,
• Tipo II: las que requieren una descripción de cómo
actúan en los componentes del conjunto difuso
(operando): ''esencialmente'', ''técnicamente'',
''estrictamente'', ''prácticamente'', ''virtualmente'', etc...
En otras palabras, las etiquetas lingüísticas pueden ser
caracterizadas cómo operadores más que construcciones
complicadas sobre las operaciones primitivas de conjuntos
difusos.
Ejemplos de etiquetas tipo I.
Considérese A, un conjunto difuso en U, que representa
el significado de un término como x=viejo. Ahora, sea
, x =muy viejo, y
el conjunto difuso que
representa el significado de . La idea es considerar a
11
la etiqueta lingüística ''muy'', como un operador que
transforma al conjunto difuso A (significado de x) en
otro conjunto difuso A* (significado de x*).
De acuerdo a éste punto de vista y sabiendo que el
lenguaje natural es muy rico y complejo, tomamos el
operador ''muy'' que podemos caracterizar con un
significado de que aún cuando no tenga validez
universal sea sólo una aproximación. Asumimos que si
el significado de un término x es un conjunto difuso A,
entonces el significado de muy X es:
más y menos
Se pueden definir etiquetas lingüísticas artificiales,
por ejemplo: más, menos, que son instancias de lo
que puede llamarse acentuador y desacentuador
respectivamente, cuya función es proporcionar
ligeras variantes de la concentración y la dilatación.
Así:
los exponentes se eligen de modo que se de la
igualdad aproximada: mas mas x = menos muy x,
y que, además, se pueden utilizar para definir
etiquetas lingüísticas cuyo significado difiere
ligeramente de otras.
mas o menos
Otra etiqueta lingüística interesante es ''más o
menos'' que en sus usos más comunes como ''más
o menos inteligente'', ''más o menos rectangular''
etc, juega el papel de difusificador.
ligeramente
Su efecto es dependiente de la definición de
proximidad u ordenamientos en el dominio del
operando. Existen casos, sin embargo, en los que
su significado puede definirse en términos de
etiquetas lingüísticas tipo I, bajo la suposición de
que el dominio del operando es un conjunto
ordenado linealmente.
clase de
Es una etiqueta lingüística que tiene el efecto de
reducir el grado de pertenencia de los elementos
que están en el ''centro'' (grados de pertenencia
grandes) de una clase x e incrementa el de aquellos
que están en su periferia (grados de pertenencia
pequeños).
12
regular
Es una etiqueta que tiene el efecto de reducir el
grado de pertenencia de aquellos elementos que
tienen tanto un alto grado de pertenencia al
conjunto como de aquellos que lo tienen pequeño,
y sólo aumenta el grado de pertenencia de aquellos
elementos que tienen un grado de pertenencia
.
cercano al
Etiquetas tipo II.
Su caracterización envuelve una descripción de forma
que afectan a los componentes del operando, y por lo
tanto es más compleja que las del tipo I. En general, la
definición de una etiqueta de este tipo debe formularse
como un algoritmo difuso que envuelve etiquetas tipo I.
Su efecto puede describirse aproximadamente como
una modificación de los coeficientes de ponderación de
una combinación convexa. Como la magnitud de las
ponderaciones es una medida del atributo asociado,
intuitivamente una etiqueta de este tipo tiene el efecto
de aumentar las ponderaciones de los atributos
importantes y disminuir los que relativamente no lo son.
13
CAPITULO II
1. DIFERENCIA DE CONJUNTOS CRISP Y CONJUNTOS
DIFUSOS
A) Conjuntos Crisp.- conjunto donde los elementos de un
universo dado son divididos en 2 grupos distintos:
Miembros: Aquellos que realmente pertenecen al
conjunto
No miembros: Aquellos que realmente no pertenecen
al conjunto
Ejemplo: Numero Naturales
Por lo tanto existen conjuntos cuyo límite entre miembro y
no miembro es vago, con transición gradual entre esos dos
grupos.
Ejemplo:
Conjunto de persona altas
Conjunto de carros caros
B) Conjuntos Difusos.- Se atribuye a cada elemento del
universo un valor que representa el Grado de Pertenencia
de ese elemento al conjunto difuso.
Es el puente que une el concepto de imprecisión a su
modelo numérico.
Ejemplo: Personas Altas (Figura Nro. 1)
Figura Nro. 1
Ejemplo: Carros caros (Figura Nro. 2)
14
Figura Nro. 2
2. REPRESENTACION DE CONJUNTOS DIFUSOS
Un conjunto difuso F en U puede ser representado como un
conjunto de pares ordenados de un elemento genérico x y su
grado de pertenencia.
F = {( x, µ F ( x) ) / x ∈ U }
Generalmente solo son representados los valores de x con
µ ( x) > 0
∫µ
U continuo :
F
(X ) / X
U
-
∫
denota colección de todos los puntos x ЄU con
función de pertenencia µ (x)
U discreto: ∑ µ F ( X ) / X
U
-
∫
denota colección de todos los puntos x ЄU con
función de pertenencia µ ( x)
3. COMPONENTES DEL CONJUNTO DIFUSO
-
1 Eje x (Nro. Reales crecientes) que constituyen el Dominio
del conjunto difuso
2 Eje y con valores entre 0 y 1 que significa grado de
pertenencia al conjunto.
3 Función de Pertenencia (superficie) del conjunto, que
conecta un elemento del dominio con su grado de
pertenencia.
15
Figura Nro. 3: Componentes del Conjunto difuso
4. PROPIEDADES
-
Altura: Es el mayor grado de pertenencia permitido por la
función membership
-
Normalización: Un cierto conjunto difuso es normal si su
altura fuera igual a 1.
o Forma normal mínima si por lo menos un elemento
tiene µ ( x) = 1
o Forma normal máxima si por lo menos un elemento
tiene µ ( x) = 1 y otro elemento tiene µ ( x) = 0
Para un buen desempeño, los conjuntos difusos deben ser
normalizados.
-
Dominio del Conjunto difuso:
o Es el universo total de valores posibles para los
elementos del conjunto entonces depende del
contexto.
o Existen dos tipos de dominio se representa en el
Figura Nro. 4.
16
Figura Nro. 4: Tipos de Dominio
-
-
Universo de Discusión
o Es el espacio difuso completo de variaciones de una
variable o modelo.
Ejemplo. Universo de discusión para la variable de
temperatura de 100º a 360º Figura Nro. 5
Figura Nro. 5.
Soporte del Conjunto
o Es el área efectiva del dominio de un conjunto difuso
que presenta valores de µ ( x) > 0 . Figura Nro. 9
17
-
Figura Nro. 6
Observación:
o El conjunto difuso cuyo soporte es un unico punto en
U, como valor de µ ( x) = 1 , es llamado de conjunto
singleton.
Figura Nro. 7
-
Conjunto α-cut
o Es una restricción (limite) impuesta al dominio,
basado en el valor de α.
o Contiene todos loe elementos del dominio que
posean µ ( x) arriba de un cierto valor α
debil
µ ( x) ≥ α
α − cut
µ ( x) ≥ α
α − cut
fuerte
o Es útil para las funciones con largas “colas”, que
tienden a poseer valores muy bajos de µ (x) por un
dominio extenso entonces ayuda a reducir el ruido.
Figura Nro. 8.
18
Figura Nro. 8: Conjunto α-cut
5. FORMATOS
19
20
-
-
-
En general, la función Trapezoidal se adapta bastante
bien a la definición de cualquier concepto, con la ventaja
de su fácil definición, representación y simplicidad de
cálculos.
En casos particulares, el Trapecio Extendido puede ser de
granutilidad. Éste permite gran expresividad aumentando
su complejidad.
En general, usar una función más compleja no añade
mayor precisión, pues debemos recordar que se está
definiendo un concepto difuso.
21
CAPITULO III
1.- SISTEMA DE INFERENCIA FUZZY
Con base en las informaciones presentadas, es posible construir
el Sistema de inferencia Fuzzy mostrado en la Figura Nro. 9,
donde están identificadas las funciones de cada recuadro.
Figura Nro. 9
Como generalmente los datos de entrada son valores
precisos, resultados de las mediciones u observaciones
(conjuntos de datos, por ejemplo), es necesario efectuarse un
mapeamiento de estos datos precisos para los conjuntos fuzzy
de entrada relevantes, o que es realizado en el proceso de
fuzzificacion. En este proceso ocurre también la activación de
las reglas relevantes para una situación dada. Una vez
obtenido el conjunto fuzzy de salida a través del proceso de
inferencia en el proceso de defuzzificacion es efectuada una
interpretación de esa información. En el proceso de inferencia
ocurren las operaciones con conjuntos fuzzy propiamente
dichos: combinación de los antecedentes de las reglas,
implicación y regla de inferencia composicional. Los conjuntos
fuzzy de entrada relativos a los antecedentes de las reglas, y
el de salida, referentes al consecuente, pueden ser definidos
22
previamente
o,
alternativamente,
automáticamente a partir de los datos.
generados
1.1.- Base de reglas.- consiste en una colección de reglas
del tipo Si-entonces, expresadas de la siguiente forma:
R j : Si u1 es F1 j E u 2 es F2j E K E u p es F pj
Entonces v es G J
donde:
j= 1,2,3,…, M (M = numero de reglas)
Fi j y G j ⇒ Conjuntos nebulosos en Ui y V
Las variables lingüísticas son:
∧
u = col (u1 ,..., u p ) ∈ U 1 x...xU p
v ∈V
Las reglas pueden ser formuladas por:
9 Por
el
conocimiento
del
especialista:
Ejemplo
estacionamiento de un camión, como se muestra en la
Figura Nro. 10, las reglas que dio el especialista y la
matriz de de reglas que se genero a partir de las reglas.
Figura Nro. 10
9 Por el conocimiento extraído de datos históricos:
23
Ejemplo: Previsión de series temporales como se
muestra en la Figura Nro. 11,
Sea : x(k), k = 1,2,.. una serie temporal
Objetivo: dada una ventana de n medidas de x(k)
x(k- n+1), x(k- n+2), ..., x(k)
Determine x(k+l)
el valor de x I puntos al frente donde n e I
son
enteros positivos
Figura Nro. 11
Existen dos métodos para extraer las reglas fuzzy
para las series temporales.
¾ Los datos históricos establecen los conjuntos
nebulosos del antecedente y del consecuente.
¾ Se
especifica
previamente
los
conjuntos
nebulosos y después se asocia los datos con los
conjuntos definidos.
Hay que tener en cuenta que como el valor a ser
previsto depende de n valores pasados de x, cada
regla posee n antecedentes.
1.2 Modulo de inferencia. Es un sistema que mapea
conjuntos nebulosos de entrada en un conjunto nebuloso
24
⎛∧ ⎞
de salida a través de µ A→ B ⎜ x, y ⎟, tal como se muestra en
⎝
⎠
la Figura Nro. 12.
En otras palabras es el encargado de calcular el valor
global de la variable de salida, basado en las
contribuciones individuales de cada regla en la base de
reglas.
Ejemplo, Asumiendo que, para un sistema específico, un
conjunto de entradas X y uno de salidas Y son
identificadas apropiadamente, una regla-base es derivada
desde fuentes disponibles que contienen un conjunto de
reglas relacionando X a Y usando niveles lingüísticos
predefinidos.
Figura Nro. 12
Los mecanismos del sistema para derivar una acción
razonable u con respecto a una situación específica X0
puede ser interpretada simplemente como ejecución de
un proceso racional de dos estados. Observando la reglabase como un prototipo, el modulo de inferencia primero
lleva a cabo un procedimiento de formar parejas entre la
situación x,y, y las partes IF de las reglas. Para deducir
la acción correspondiente, un procedimiento de
interpolación tiene lugar entre la operación de las parejas
resultantes con las partes THEN de las reglas usando una
estrategia de inferencia fuzzy.
1.3. Modulo de Fuzzificacion: Este modulo normaliza la
entrada, es decir, traduce los valores físicos de las variables
25
de estado a un universo de discurso normalizado, además,
convierte el valor en curso de una variable de estado en un
conjunto fuzzy. Existen varias estrategias de fuzzificación,
dos de estas son:
¾ Inferencia basada en una composición, e
¾ Inferencia basada en la activación individual de las
reglas.
1.4. Modulo de Defuzzificador.- Este elemento produce una
salida precisa para el sistema nebuloso de salida obtenido
por el sistema de inferencia.
Usamos las siguientes medidas, donde AЄ A, y donde E es
el dato de entrada que codificamos:
Tres casos posibles:
• 1. λ + µ = 1 → No hay incertidumbre.
• 2. λ + µ > 1 → Conflicto: Es posible que E sea A y ¬A.
• 3. λ + µ < 1 → Ignorancia:E puede ser o no A (falta
información).
Cuanto mayor sea la distancia de (λ + µ ) con 1, mayor
incertidumbre (conflicto o ignorancia). Cuanto mayor es el
valor (λ + µ), menor es la especificidad de E.
Representación Grafica de λ + µ
26
Requisito IDEAL de la Defuzzificadificacion: Que el
resultado de la defuzzificacion sea igual al valor original
fuzzificado.
– Si F es la función de codificación y F–1 la de
defuzzificacion, el objetivo es que: F–1 (F(E)) = E.
– Ese requisito es muy difícil de conseguir.
Existen multitud de sistemas de defuzzificacion:
– El sistema a elegir depende del código A empleado.
– En general se emplean sólo las medidas de posibilidad,
pues simplifica los cálculos y los hacen más intuitivos.
DEFUZZIFICACION para Datos crisp o Puntuales
(Pointwise Data):
Sólo conocemos los valores de posibilidad (o necesidad) de
cierto dato y queremos reconstruir dicho dato de forma que
sea coherente con ellos.
– Dos familias básicas de sistemas para
Defuzzificacion:
• Que usan los valores modales de los conjuntos
difusos del código: Valores con la altura de cada
conjunto difuso (los núcleos).
• Que usan el área de pertenencia de los elementos
del código.
¾
Máximo Defuzzicador : Examina el conjunto nebuloso B de
salida y escoge como valor preciso, el valor y (variable de
salida) para el cual µB(y) es máximo. Ejemplo en la Figura
Nro. 13
27
Figura Nro. 13
¾ Media de los Máximos: Examina el conjunto nebuloso B y
primero se determina los valores de y para los cuales µB(y)
es máximo. En seguida se calcula la media de esos
valores. Ejemplo en la Figura Nro. 14
Figura Nro. 14
¾ Centroide Consiste en crear para la salida del sistema una
función de pertenencia a un nuevo conjunto obtenido como
unión de aquellos a los que pertenece parcialmente el valor
de salida. Esta nueva función puede calcularse mediante la
suma de las funciones de pertenencia de estos conjuntos,
pero multiplicadas aritméticamente por el grado de
pertenencia de la salida al subconjunto de las reglas de
control. Esto quiere decir que determina el centro de la
28
gravedad y del conjunto nebuloso B y es utilizado como la
salida del sistema nebuloso.
y=
∫ yµ ( y)dy
∫ µ ( y)dy
B
s
B
s
Donde S es el soporte de B y como frecuentemente S es
discreto, la formula se transforma a:
∑ yi µ B ( y)dy
y= i
∑i µ B ( y)dy
El problema de este método es la dificultad del calculo
¾ Altura
Sea y 1 y el centro de gravedad del conjunto nebuloso B 1
(asociado a la activación de la regla)
-
Primero se evalúa µ bΙ ( y Ι )
-
En seguida se evalúa la suma:
∑ y µ (y )
=
∑ µ (y )
Ι
yh
Ι
BΙ
Ι
Ι
Ι
BΙ
Este método es simple por el centro de gravedad de las
funciones de pertenencia mas comunes es conocido a
priori:
o Triangular (simétrica): vértice superior del
triangulo
o Gausiana: valor central de la función
o Trapezoidal(simétrica) punto medio del soporte
El problema es que solo utiliza el centro del soporte yi de la
función de pertenencia del consecuente y también
cualquiera que sea la amplitud de la función de
pertenencia, el método ofrece el mismo resultado.
¾ Altura Modificada: Sea y 1 el centro de la gravedad del
conjunto nebuloso B 1 (asociado a la activación de la regla
RI)
29
Primero se evalúa µ bΙ ( y Ι )
∑ y µ ( y ) /(δ )
=
∑ µ ( y ) /(δ )
Ι
En seguida se evalúa y MH
Ι
Ι 2
BΙ
Ι
Ι
Ι
Ι 2
BΙ
Donde δ I es la medida de la extensión del soporte del
consecuente de la regla R1
Para funciones de pertinencias triangulares y trapezoidales
δ I es el soporte del conjunto.
Para funciones gausianas δ I es la desviación estándar.
Resumiendo, el Proceso General es el siguiente:
– 1. Emparejar Antecedentes y Entradas:
• Para cada REGLA se calcula el grado de
emparejamiento entre cada proposición atómica de su
antecedente y el valor correspondiente de la entrada.
– 2. Grado de Activación o Agregación de los
Antecedentes:
• Para cada REGLA se calcula el Grado de Activación
aplicando una conjunción (t) o disyunción (s) según
corresponda a los valores anteriores del Paso 1.
– 3. Resultado de cada Regla:
• Para cada REGLA se calcula su valor resultante según
su Grado de Activación y la semántica elegida para la
Regla.
– Este es el paso más largo y complejo: Para cada
valor en las Salidas se debe calcular el mayor valor
de la operación, para todos los posibles valores de
las Entradas (operación supx).
– 4. Regla de Combinación:
• Agregación de todos los resultados individuales
obtenidos de cada una de las reglas aplicadas.
2.- Cuando y como utilizar lógica difusa
30
La lógica difusa se utiliza en sistemas donde las técnicas
difusas son necesarias, o benéficas entre ellas tenemos:
o Sistemas complejos, donde es muy difícil o
imposible crear un modelo.
o Sistemas controlados por expertos humanos.
o Sistemas con complejas y continuas entradas y
salidas.
o Sistemas que usan observaciones humanas
como entradas o como reglas básicas.
o Sistemas que son naturalmente vagos como las
ciencias sociales o relativos al comportamiento,
la conducta y el proceder.
31
CONCLUSIONES:
-
La lógica difusa, admite verdades y falsedades parciales.
Aceptar esta premisa exige una nueva forma de ver los
problemas, la realidad.
-
La logica difusa junto con otras herramientas han abierto
las puertas al tratamiento de una gran variedad de
fenómenos y sistemas que resultaban, hasta antes de la
aparición de aquéllas, difíciles de definir -y, en ciertos
casos, la tarea era casi imposible mediante los modelos
matemáticos convencionales, que suelen pensarse como
infalibles y exactos.
-
A través de estos conceptos dados en este proyecto,
podremos entender mas sobre lo que es lógica difusa y sus
áreas de aplicación.
32