Filtros de Suavizado
Anuncio

Filtros de Suavizado
Curso PDI
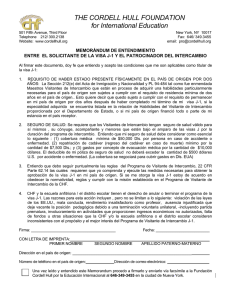
Filtro basado en las Medias
n
El filtro más simple
P[i-1,j-1]
P[i-1,j]
P[i-1,j+1]
P[i,j-1]
P[i,j]
P[i,j+1]
P[i+1,j-1]
P[i+1,j]
P[i+1,j+1]
P '[i, j ] =
~
M
Media
P[i,j]
1 1 1
∑ ∑ P[i + x, j + y]
9 x= −1 y= −1
1/9
1/9
1/9
1/9
1/9
1/9
1/9
1/9
1/9
1
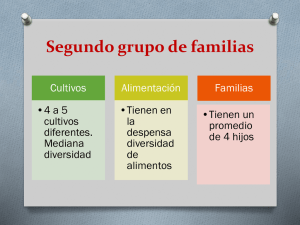
Filtro basado en la Media
Promedio Direccional
n
Otra forma de calcular el valor del píxel P’[i,j] es a
través de una media basada en los valores
promedio de las columnas y las diagonales
P[i-1,j-1]
P[i-1,j]
P[i-1,j+1]
P[i,j-1]
P[i,j]
P[i,j+1]
P[i+1,j-1]
P[i+1,j]
P[i+1,j+1]
P1 =
1 1
1 1
P
[
i
+
x
,
j
+
x
],
P
=
∑
2
∑ P[i + x, j − x]
3 x =−1
3 x= − 1
P3 =
1 1
1 1
P[i + x , j ], P4 = ∑ P[i , j + x ]
∑
3 x= − 1
3 x= −1
P' [i, j ] = max{P1 , P2 , P3 , P4}
2
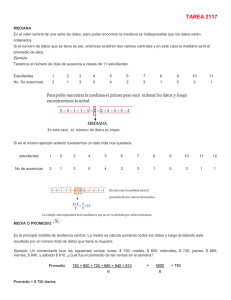
Media Ponderada (Low Pass Filter)
~ ( P[ i, j]) ⊗ P~ [ i, j] =
P' [ i, j] = M
MP
3
1
1
1
1
1 P[ i, j] 1 ⊗ P
~ [ i, j]
3
8 + P[i, j ]
1
1
1
Si P=0, se sustituye el valor de P por la media de sus vecinos
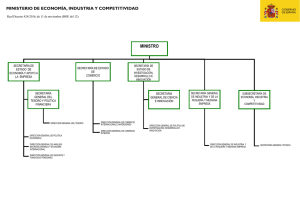
Media Gaussiana (Fuerte)
n
En la media gaussiana, se suele usar la función:
y = 4e
− x2 / 2
1 2 1
1
~
M Gauss ( P[i, j ]) =
2 4 2
16
1 2 1
3
Media Gaussiana Fuerte
1 2 1
1
~
~
P '[i, j ] = M MP ( P[i, j]) ⊗ P3[i, j ] = 2 4 2 ⊗ P~3[i, j ]
16
1 2 1
Media Gaussiana (Débil)
y = 12 e
− x 2 / 0 .9
1 4 1
1
~
~
~ [ i, j]
P' [i, j ] = M Gauss _ Debil ( P[i, j ]) ⊗ P3 [i , j] =
4 12 4 ⊗ P
3
32
1 4 1
4
Media Geométrica
n
La media geométrica es una forma alternativa para
calcular el valor para el píxel P’[i,j] considerando la
norma de un vector
X = {x1 ,K x n }, || X ||= n x1 x2 L xn
P ' [i, j] = 9
1
1
∏∏ P[i + x, j + y]
x = −1 y = −1
Media Geométrica
n
n
El costo computacional de la media
aritmética es elevado comparado con otros
operadores
No esta ampliamente difundida debido a lo
comentado anteriormente
5
Media Armónica
n
Basada en obtener el valor medio de los recíprocos
Pk =
P[i-1,j-1]
P[i-1,j]
P[i-1,j+1]
P[i,j-1]
P[i,j]
P[i,j+1]
P[i+1,j-1]
P[i+1,j]
P[i+1,j+1]
0 si Pk = 0
9
P'[i , j] =
9 / S si S = ∑1 / Pk
k =1
Mediana
n
n
Los operadores vistos hasta el momento,
tienden a tener problemas si los valores
dentro de la región de la matriz 3x3 son muy
dispersos
Para disminuir esta problemática, se puede
utilizar la mediana de la matriz como el
nuevo valor del píxel central
6
Mediana
n
Se obtiene la mediana de la matriz de 3 x 3
M3,3=
P[i-1,j-1]
P[i-1,j]
P[i-1,j+1]
P[i,j-1]
P[i,j]
P[i,j+1]
P[i+1,j-1]
P[i+1,j]
P[i+1,j+1]
P =< P1 ,...Pn >: Pi <= Pj ; Pi , Pj ∈ M
med( M 3, 3 ) = P[5]
P '[i, j ] = med( M 3,3 )
Mediana
n
Con este método, las interferencias
presentes en la región analizada (píxeles con
valores extremos) tenderán a estar alejados
de la mediana, por lo que en una mayor
medida se recuperaran colores más
representativos de la región
7
Mediana Recortada
n
Similar a la mediana, solo que en este
método el algoritmo recibe dos parámetros:
(K,m)
q
q
n
K: dimensión de la matriz a utilizar
m: numero de elementos eliminados de los
extremos
El procedimiento inicia ordenando los valores
de los píxeles en un vector (como en la
mediana)
Mediana Recortada
n
Se evalúa la mediana eliminando los “m” valores
más extremos del arreglo
P =< Pm ,...Pn − m >: Pi <= Pj ; Pi , Pj ∈ M
med (M 3,3 ) = P[s ], s =| P | / 2
P' [i, j ] = med ( M 3,3 )
8