Metódos Globales en Relatividad General
Anuncio

Metódos Globales en Relatividad General
Marco Maceda
Departamento de Fı́sica, Universidad Autónoma Metropolitana-Iztapalapa
A.P. 55-534, C.P. 09340, México D.F.
1 de febrero de 2012
II
Índice general
Introducción
V
Lista de sı́mbolos
VII
1. Estructura causal
1.1. Pasado, presente y futuro . . . . . . . . . . . . . . . . . . . . . . . . .
1.2. Condiciones de causalidad . . . . . . . . . . . . . . . . . . . . . . . . .
1.3. Dominios de dependencia e hiperbolicidad global . . . . . . . . . . . . .
1
1
9
13
2. Singularidades
2.1. Preliminares . . . . . . . . . . . . . . . . . . . . . . . . .
2.2. Ecuación de Raychaudhuri: análogo Newtoniano . . . . .
2.3. Congruencias de geodésicas tipo tiempo . . . . . . . . . .
2.4. Congruencias de geodésicas nulas . . . . . . . . . . . . .
2.5. Puntos conjugados . . . . . . . . . . . . . . . . . . . . .
2.5.1. Criterios para la existencia de puntos conjugados
2.6. Longitud extrema de geodésicas tipo tiempo . . . . . . .
2.7. Puntos conjugados de geodésicas nulas . . . . . . . . . .
2.8. Existencia de curvas de longitud máxima . . . . . . . . .
2.9. Teoremas sobre singularidades . . . . . . . . . . . . . . .
2.9.1. La no completez de las geodésicas nulas . . . . . .
.
.
.
.
.
.
.
.
.
.
.
27
27
28
31
34
37
37
40
44
46
50
53
.
.
.
.
.
.
57
57
59
60
61
61
62
3. Formulación de valores iniciales
3.1. Descomposición ADM . . . . . . . . . . . . . . . . . .
3.1.1. Ecuaciones de Gauss-Codacci . . . . . . . . . .
3.2. Ecuaciones de Einstein en vacı́o . . . . . . . . . . . . .
3.2.1. Coordenadas harmónicas y ecuaciones reducidas
3.3. Existencia y unicidad local . . . . . . . . . . . . . . . .
3.4. Existencia y unicidad global . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Bibliografı́a
65
Índice alfabético
67
IV
ÍNDICE GENERAL
Introducción
Actualmente se piensa que la teorı́a de la Relatividad General es un formalismo
matemático que describe de manera adecuada la gravitación a nivel macroscópico. Sin
embargo, existen ciertos problemas inherentes a la teorı́a que merecen la pena de ser
estudiados debido a sus implicaciones en fı́sica fundamental. Entre ellos hay dos que
se pueden mencionar con especial atención: el primero concierne a la presencia de singularidades en la teorı́a, relacionadas con la existencia del colapso gravitacional bajo
ciertas hipótesis, y la incorporación de conceptos provenientes de mecánica cuántica lo
cual conducirı́a a una formulación cuántica de gravedad.
En estas notas se dará una introducción al primer tópico [1, 2, 3]. Entre los temas
cubiertos en estas notas se encuentran los siguientes:
1. Estructura causal,
2. Ecuación de Raychaudhuri,
3. Puntos conjugados,
4. Teoremas sobre singularidades,
5. Descomposición ADM,
6. Formulación del problema de valores iniciales.
En la parte relacionada a la estructura causal, se revisan conceptos básicos concernientes a la estructura de cono de luz de la teorı́a, tales como la definición de una
superficie de Cauchy, lo cual es de utilidad en el estudio posterior del problema de
valores iniciales en Relatividad General. Después de desarrollar este tema, se analiza
la ecuación de Raychaudhuri, que sirve como elemento base para la formulación de los
teoremas de singularidades.
La existencia de puntos conjugados sirve como auxiliar para el estudio de los teoremas de singularidades, y proporciona una descripción bastante simple del efecto de
enfocamiento de geodésicas cercanas, un hecho ı́ntimamente ligado con el carácter atractivo de la gravedad. El uso de la ecuación de Raychaudhuri, describiendo la evolución
de congruencias de geodésicas en un espacio-tiempo dado, es una herramienta útil para
el estudio cuantitativo de la expansión, distorsión y rotación que sufren éstas.
VI
Introducción
Los teoremas sobre singularidades permiten obtener resultados importantes sobre
el colapso gravitacional que sufre una estrella supermasiva; en particular se puede dar
una respuesta afirmativa a la pregunta sobre si la aparición de una singularidad es
un fenómeno estable en la teorı́a, asumiendo ciertas condiciones que parecen razonables
desde el punto de vista fı́sico. Nota especial merece la hipótesis de la censura cósmica [4],
la cual establece que un espacio-tiempo genérico no desarrollará singularidades que sean
visible desde el infinito.
El problema de valores iniciales es de fundamental importancia en Relatividad General, ya que cuando la teorı́a se aplica para modelar un sistema fı́sico, se deben especı́ficar
las condiciones a partir de las cuales éste evolucionará. Esto ha motivado un análisis
bastante exhaustivo tanto de soluciones exactas a las ecuaciones de campo de la relatividad, como de los problemas de convergencia y estabilidad de soluciones numéricas. En
este último aspecto, diversos esquemas de simulación basados en el formalismo ADM
han sido implementados en la literatura.
Cada capı́tulo posee al final una serie de ejercicios relacionados a los temas presentados en estas notas. Estos problemas sirven como una herramienta adecuada para la
introducción de conceptos y técnicas matemáticas nuevas.
Dr. Marco Maceda
Departamento de Fı́sica
UAM-Iztapalapa
1 de febrero de 2012
Lista de sı́mbolos
X
X
∅
S
T
denota al conjunto vacı́o
Y
unión de los conjuntos X e Y
Y
intersección de los conjuntos X e Y
X⊂Y
X es un subconjunto de Y
Int[X]
el interior del conjunto X
∂X
la frontera del conjunto X
X̄
la cerradura del conjunto X
x∈X
x es un elemento del conjunto X
inf X
el infimo del conjunto X
supX
el supremo del conjunto X
f ◦g
composición de las funciones f y g
expq
mapeo exponencial en el punto q
±
I (X)
cono de luz futuro/pasado del conjunto X
J ± (X)
futuro/pasado causal del conjunto X
x∈
/X
±
x no es un elemento del conjunto X
D (X)
dominio de dependencia futuro/pasado del conjunto X
H ± (X)
horizonte de Cauchy futuro/pasado del conjunto X
µ[X]
C
∞
la medida del conjunto X
el conjunto de funciones infinitamente diferenciables continuas
Σ
hipersuperficie de Cauchy o tipo espacio
gab
métrica de un espacio-tiempo curvo
⇒
denota implicación
indica el final de la demostración de una proposición o un teorema
VIII
Lista de sı́mbolos
Capı́tulo 1
Estructura causal
1.1.
Pasado, presente y futuro
Definición 1.1.1 Sea (M, gab ) un espacio-tiempo y sea p ∈ M un punto (o evento) en
la variedad. Se define el cono de luz en el punto p como el cono de luz pasando a través
del origen del espacio tangente Vp .
Observación Una mitad del cono de luz se designa como futuro mientras la otra mitad
se denomina pasado. Se asume una signatura Lorentziana (+, −, −, −) para la métrica
gab . De este modo un vector temporal X a ∈ Vp satisface gab X a X b > 0 por ejemplo.
Definición 1.1.2 Si es posible una asignación continua del futuro y el pasado sobre
un espacio-tiempo (M, gab ), se dice entonces que (M, gab ) es orientable en el tiempo.
Definición 1.1.3 Un vector nulo o de tipo tiempo en la mitad futura del cono de luz
se dice que es un vector dirigido al futuro. De modo similar se define un vector dirigido
al pasado.
Lema 1.1.1 Sea (M, gab ) un espacio-tiempo orientable, entonces existe un campo vectorial temporal no nulo suave (no necesariamente único) ta en M.
Demostración El espacio-tiempo puede ser equipado de una métrica Riemanniana
positiva definida hab . Escogase el campo vectorial ta como el único eigenvector unitario
dirigido al futuro con eigenvalor positivo λ, de gab con respecto a hab , i.e.,
(gab − λhab )tb = 0,
hab ta tb = 1.
(1.1.1)
De este modo gab ta tb = λ > 0, y además ta variará de manera suave en M [1].
Observación Si existe un campo vectorial temporal no nulo entonces el espacio-tiempo
es orientable.
2
Estructura causal
Observación Si un espacio M es paracompacto entonces es segundo contable y admite
ası́ una partición de la unidad. El siguiente resultado permite definir entonces una
métrica Riemanniana al escoger en cada carta el producto interno estándard en Rn .
Teorema 1.1.2 [5] Sea M una variedad con un atlas A = {(Vα , φα )} donde φα : Vα →
Vα′ ⊂ E es una carta. Sea tα un campo tensorial C k , k ≥ 1, de tipo (r, s) definido en
Vα′ para cada α. Asúmase que existe una partición de la unidad {(Ui , gi)} subordinada
a A, y sea
X
t(p) :=
gi φ∗α(i) tα(i) (p),
(1.1.2)
i
una suma finita para cada p ∈ M. Entonces t es un campo tensorial C k de tipo (r, s)
en M.
Demostración Ya que {Ui } es localmente finito, la suma en todo punto es una suma
finita y por lo tanto t(p) es un tensor de tipo (r, s) para todoP
p ∈ M. Además, t es C k
ya que la representación local de t en la carta (Vα(i) , φα(i) ) es j (gi ◦ φ−1
α(j) )tα(j) , donde
la suma es sobre los ı́ndices j tales que Vα(i) ∩ Vα(j) 6= {∅}. Debido a localidad finita, el
número de ı́ndices j es finito.
Definición 1.1.4 Una curva diferenciable λ(t) es una curva temporal dirigida al futuro,
si para todo p ∈ λ, el vector tangente ta es un vector temporal dirigido al futuro. De
igual modo, una curva diferenciable λ(t) es una curva causal dirigida al futuro, si para
todo p ∈ λ, el vector tangente ta es un vector temporal o nulo dirigido al futuro.
Observación Definiciones similares pueden darse para curvas temporales o causales
dirigidas al pasado.
Definición 1.1.5 El futuro cronológico de p ∈ M esta dado por
I + (p) := {q ∈ M| ∃ λ(t) temporal dirigida al futuro con λ(0) = p, y λ(1) = q}.
(1.1.3)
Observación Ya que es siempre posible hacer una deformación pequeña del punto
final de una curva temporal preservado su carácter temporal, se tiene que ∀ q ∈ I + (p)
existe una vecindad abierta O de q tal que O ⊂ I + (p). En consecuencia I + (p) es un
subconjunto abierto de M.
Observación p ∈ I + (p) si existe una curva temporal cerrada iniciando y terminando
en p.
Definición 1.1.6 Sea S ∈ M, se define
I + (S) :=
[
p∈S
I + (S) es siempre un conjunto abierto.
I + (p).
(1.1.4)
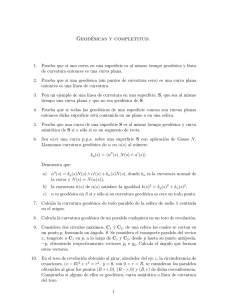
1.1 Pasado, presente y futuro
3
I + (p)
∂I + (p)
p
∂I − (p)
I − (p)
Figura 1.1: Cono de luz asociado al punto p
Observación Definiciones similares existen para los pasados cronológicos I − (p) y I − (S).
Observación Las siguientes relaciones se satisfacen
I + [I + (S)] = I + (S),
I + (S̄) = I + (S),
(1.1.5)
donde S denota la cerradura de S.
Definición 1.1.7 El futuro causal de p ∈ M esta dado por
J + (p) := {q ∈ M| ∃ λ(t) causal dirigida al futuro con λ(0) = p, y λ(1) = q}. (1.1.6)
Observación Se tiene que p ∈ J + (p) siempre (curva causal trivial λ(t) = p para todo
t). En espacio plano J + (p) es cerrado pero en general puede ser abierto.
Definición 1.1.8 Sea S ∈ M, se define
J + (S) :=
[
J + (p).
(1.1.7)
p∈S
Observación Es claro que definiciones similares existen para los pasados causales
J − (p) y J − (S).
En espacio-tiempo Minkowskiano, I + (p) es el conjunto de puntos que pueden ser
alcanzados por medio de geodésicas temporales dirigidas al futuro que inician en p.
La frontera de I + (p), que se denota como ∂I + (p), es generada por las geodésicas nulas
dirigidas al futuro que tienen a p como punto inicial. En espacio-tiempos con curvatura,
ninguna de estas situaciones puede llegar a suceder de manera global. Sin embargo de
manera local estas propiedades son válidas.
Teorema 1.1.3 Sea (M, gab ) un espacio-tiempo arbitrario y sea p ∈ M, entonces existe
una vecindad normal convexa de p, i.e., un conjunto abierto U ∋ p tal que para todo
q, r ∈ U, existe una única geodésica γ que conecta q con r y contenida completamente
4
Estructura causal
en U. Además I + (p)|U consiste de aquellos puntos alcanzados por medio de geodésicas
temporales dirigidas al futuro que inician en p y contenidas en U, donde I + (p)|U representa el futuro cronológico de p en (U, gab ). Además, ∂I + (p)|U es el conjunto generado
por geodésicas nulas dirigidas al futuro en U que tienen a p como punto inicial.
Demostración La demostración de la existencia de una vecindad convexa esta basada
en los resultados siguientes [6]:
Lema 1.1.4 Sea p ∈ M, y A una vecindad de p donde se han definido coordenadas
normales xi . Para cualquier c > 0, con Bc (p) ⊂ A, existe un s > 0, tal que para
q ∈ Bc (p) el mapeo exponencial expq es un difeomorfismo de una vecindad U p del
origen del espacio tangente Vq sobre Bs (q) ⊂ A.
Lema 1.1.5 Existe un número real a, a < 0 < 1, y Ba (p) ⊂ A, tal que si 0 < b < a,
y γ es una geodésica con vector tangente Tγ y f ◦ γ(0) =
f = 0, entonces f ◦ γ
Pb, T2 γ(0)
1/2
posee un mı́nimo relativo estricto en γ(0), donde f := ( i xi ) . Esto significa que si
γ es tangente a la esfera centrada en p de radio b en γ(0), entonces γ no esta contenida
en Bb (p) en una vecindad de γ(0).
Lema 1.1.6 Sea a dado por el Lema 1.1.5. Aplicando el Lema 1.1.4 con c = a/2, se
obtiene un real s tal que 0 < s < 2a/3, por lo que Bs/2 (p) es convexo.
La caracterización de I + (p)|U y su frontera ∂I + (p)|U es consecuencia a su vez de lo
siguiente [2]
Lema 1.1.7 Sea U una vecindad convexa normal alrededor de p ∈ M. Entonces en U
las geodésicas tipo tiempo son ortogonales a las superficies tridimensionales σ = const.,
donde para q ∈ M se define
−1
σ|q := g(exp−1
p q, expp q).
(1.1.8)
Proposición 1.1.8 Sea U una vecindad convexa normal alrededor de p ∈ M. Entonces
los puntos que pueden ser alcanzados a partir de q por curvas tipo tiempo (o causales)
contenidas en U, son aquellos de la forma expp (X a ), donde X a ∈ Vp , gab X a X b > 0
(≥ 0).
Siendo más precisos, las curvas causales están en realidad contenidas en expp (C p ), donde
Cp es el conjunto de todos los vectores tipo tiempo en el punto p.
Corolario 1.1.9 Si q ∈ J + (p) − I + (p), entonces cualquier curva causal conectando p
con q debe ser una geodésica nula.
Observación Se ve que para todo S ⊂ M, J + (S) ⊂ I + (p). Ya que I + (S) ⊂ J + (S) se
tiene que I + (p) = J + (p). Además I + (S) = Int[J + (S)], por lo que ∂I + (S) = ∂J + (S).
1.1 Pasado, presente y futuro
5
Definición 1.1.9 Un subconjunto S ⊂ M es acronal si no existen puntos p, q ∈ S tales
que q ∈ I + (S), i.e., si I + (S) ∩ S = {∅}.
Teorema 1.1.10 Sea (M, gab ) un espacio-tiempo orientable en el tiempo y sea S ⊂ M.
Entonces ∂I + (S) es una subvariedad continua, acronal, tridimensional (incrustada) de
M.
Demostración La demostración puede establecerse por medio de los siguientes pasos:
1. Sea q ∈ ∂I + (S). Si p ∈ I + (q), entonces q ∈ I − (p) y ya que I − (p) es abierto existe
una vecindad abierta O de q la cual esta contenida en I − (p). Ya que q ∈ ∂I + (S)
se tiene que O ∩ I + (S) 6= {∅}, lo que implica p ∈ I + [O ∩ I + (S)] ⊂ I + (S). Esto es
I + (q) ⊂ I + (S).
I + (S)
I + (q)
p
∂I + (S)
q
S
O
I − (q)
2. Del mismo modo se tiene I − (q) ⊂ M − I + (S).
3. Si ∂I + (S) no es acronal existen q, r ∈ ∂I + (S) distinto del vacı́o tales que r inI + (q),
por lo que r ∈ I + (S). Sin embargo esto es una contradicción, ya que I + (S) es
abierto lo que implica ∂I + (S) ∩ I + (S) = {∅}. Se tiene ası́ que ∂I + (S) es acronal.
4. Definanse coordenadas normales (x0 , x1 , x2 , x3 ) en una vecindad Uα de q ∈ ∂I + (S)
con ∂x∂ 0 tipo tiempo y tal que las curvas {xi = const., i = 1, 2, 3} (curvas integrales
de ∂x∂ 0 ), intersectan I + (q)|Uα y I − (q)|Uα . Entonces cada una de estas curvas debe
contener precisamente un punto de ∂I + (S).
5. La coordenada x0 de estos puntos debe ser una función de Lipschitz (C 1− ) de las
coordenadas xi , ya que 2 puntos en ∂I + (S) no pueden tener una separación tipo
tiempo.
I + (q)
∂I + (S)
q
S
O
I − (q)
∂ a
∂x0
6
Estructura causal
6. El mapeo φα : S ∩ Uα → R3 definido por medio de φα := xi (p), i = 1, 2, 3, para
p ∈ S ∩ Uα es un homeomorfismo.
7. La familia (S ∩ Uα , Uα ) es un atlas C 1− de ∂I + (S), por lo que es una subvariedad
incrustada.
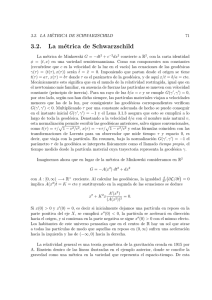
Observación En general una frontera acronal ∂S se puede dividir en cuatro conjuntos
disjuntos ∂S0 , ∂SN , ∂S± , siendo los conjuntos de puntos conectados por geodésicas de
tipo espacial, nulas o bien puntos finales futuros (pasados) de una geodésica nula en ∂S
respectivamente.
∂S+
∂S0
∂SN
∂S−
Figura 1.2: Distintos tipos de fronteras acronales
Definición 1.1.10 Una curva continua λ es una curva dirigida al futuro de tipo temporal (o causal) si para todo p ∈ λ existe una vecindad normal convexa U de p tal que
si λ(t1 ), λ(t2 ) ∈ U con t1 < t2 , entonces existe una curva diferenciable dirigida al futuro
(o causal) en U de λ(t1 ) a λ(t2 ).
Observación El carácter temporal o causal de una curva no se ve afectado por una
reparametrización continua inyectiva.
Definición 1.1.11 Sea λ(t) una curva causal dirigida al futuro. Se dice que p ∈ M es
un punto final futuro de λ si para toda vecindad O de p existe un t0 tal que λ(t) ∈ O
para todo t > t0 .
Γ(t)
p
O
Figura 1.3: Punto final de una curva causal Γ(t)
1.1 Pasado, presente y futuro
7
Observación El punto final, si existe, es único (variedad de Hausdorff). Sin embargo
el punto final no necesariamente se encuentra sobre la curva.
Definición 1.1.12 La curva λ se dice que es sin fin en el futuro si no tiene punto final
futuro.
Observación Si λ es una curva causal diferenciable con punto final futuro p, entonces
podrı́a no ser posible extender λ más allá de p como una curva causal diferenciable, sin
embargo λ puede ser siempre extendida como una curva causal continua mediante la
unión de porciones de curvas causales continuas. Definiciones y construcciones similares
para el pasado.
Lema 1.1.11 Sea λ una curva causal sin fin en el pasado pasando por el punto p.
Entonces, a través de cualquier q ∈ I + (p) existe una curva γ de tipo temporal sin fin
en el pasado tal que γ ∈ I + (λ).
Demostración Sea t ∈ [0, ∞) el parámetro de la curva γ. Sea gab una métrica Riemanniana en M. Usando 1.1.3 se puede construir una curva γ(t) de tipo temporal para
t ∈ [0, 1], con punto inicial en q y que satisface la propiedad γ ∈ I + (S) y
sup { d[γ(t), λ(t′ )] }t,t′ ∈[0,1] < C/(1 + t).
γ(t)
(1.1.9)
q
λ(t)
λ(0)
λ(1)
Por inducción γ(t) se extiende a una curva preservando estas condiciones y definida
para todo t ∈ [0, n], para todo n, i.e., para todo t ∈ [0, ∞). La curva γ será sin fin en
el pasado ya que un punto final de γ serı́a un punto final de λ también.
Definición 1.1.13 Sea {λn } una secuencia de curvas causales. Un punto p ∈ M se
dice que es un punto de convergencia de {λn } si dada cualquier vecindad abierta O de
p, existe un N ∈ N tal que λn ∩ O 6= {∅} para todo n > N.
Definición 1.1.14 Una curva λ es una curva de convergencia de {λn } si cada p ∈ λ
es un punto de convergencia.
8
Estructura causal
Definición 1.1.15 p es un punto lı́mite de {λn } si toda vecindad abierta de p intersecta
infinitamente varios λn .
Definición 1.1.16 Una curva λ es una curva lı́mite de {λn } si existe una subsecuencia
{λ′n } para la cual λ es una curva de convergencia. Esto es, si λ es una curva lı́mite
entonces todo p ∈ λ es un punto lı́mite.
Observación Una curva γ tal que cada p ∈ γ es un punto lı́mite no es necesariamente
una curva lı́mite.
Lema 1.1.12 Sea {λn } una secuencia de curvas causales sin fin en el futuro las cuales
tienen un punto lı́mite p. Entonces existe una curva causal sin fin λ pasando a través
de p la cual es una curva lı́mite de {λn }.
Demostración Escogase una vecindad normal convexa U de p y una bola BR (p) de
radio coordenado normal Riemanniano R alrededor de p y contenida en U. Sea {λ′n } una
subsecuencia de {λn } que converge a p y sea {λ′′n } una subsubsecuencia la cual converge
a un punto en la esfera de radio R. Es posible elegir tales subsecuencias debido a la
compacidad de BR (p).
U
λ
p
λ∞
λ1
Se toman ahora las esferas cuyos radios son múltiplos racionales, entre 0 y 1, del
radio R y se extraen puntos lı́mites y subsecuencias convergiendo a estos puntos. La
cerradura de esos puntos, define una curva causal lı́mite λ. Se toma ahora el punto final
de λ en la esfera de radio R y se repite el procedimiento. De este modo se extiende λ
indefinidamente.
Teorema 1.1.13 Sea C un subconjunto cerrado del espacio-tiempo M. Entonces todo
punto p ∈ ∂I + (C), con p ∈
/ C, esta sobre una geodésica nula λ, la cual esta contenida
completamente en ∂I + (C) y la cual es sin fin en el pasado o bien tiene un punto final
pasado en C.
Demostración Sea {qn } una secuencia de puntos que convergen a p. Para cada qn sea
λn una curva tipo tiempo dirigida al pasado, conectando qn con un punto en C.
Considérese la variedad M\C. En ella, cada λn es sin fin en el pasado y p es un
punto lı́mite de la secuencia λn . Por el lema anterior, existe una curva lı́mite causal sin
fin en el pasado λ pasando por p. Cada punto de λ es un punto lı́mite de las secuencias
1.2 Condiciones de causalidad
9
q1
qn
p
λn
C
en I + (C), por lo que λ ⊂ I + (C). Por otro lado, si algún punto de λ estuviese en I + (C)
se tendrı́a que p ∈ I + (C), ya que p podrı́a conectarse con C por medio de una curva
causal, la cual no es una geodésica nula. Esto serı́a una contradicción al hecho de que
p ∈ ∂I + (C). Por lo tanto λ ⊂ ∂I + (C) y ya que ∂I + (C) es acronal, λ debe ser una
geodésica nula. Ya que λ es sin fin en el pasado en la variedad M\C, entonces en M, λ
debe permanecer sin fin o bien debe tener un punto final pasado en C.
1.2.
Condiciones de causalidad
Localmente los espacio-tiempos de relatividad general poseen la misma estructura
que el espacio de Minkowski en relatividad especial. Sin embargo de manera global, la
situación cambia radicalmente, ya que la topologı́a de un espacio-tiempo puede ser tal
que permita la existencia de curvas de tipo tiempo cerradas. Además, en espacio-tiempos
con curvas causales no triviales, condiciones de consistencia severas pueden existir en
las soluciones describiendo la propagación de campos fı́sicos sobre la variedad.
De manera general se tiene el consenso que espacio-tiempos con curvas causales
cerradas no triviales no representan modelos realistas de la naturaleza. Es por eso que
se hace necesario estudiar bajo que condiciones dichas curvas causales están excluidas.
Definición 1.2.1 Un espacio-tiempo (M, gab ) se dice que satisface la condición de
causalidad fuerte, o es fuertemente causal, si para todo p ∈ M, y para toda vecindad O de p existe una vecindad V de p contenida en O tal que una curva causal no
intersecta a V más de una vez.
Observación Si un espacio-tiempo viola causalidad fuerte en p, entonces cerca de p
existen curvas causales las cuales están arbitrariamente cerca de intersectarse a sı́ mismas. En un espacio-tiempo de este tipo, curvas causales cerradas pueden ser producidas
mediante una pequeña modificación de la métrica gab en una vecindad arbitrariamente
pequeña de p.
Lema 1.2.1 Sea (M, gab ) fuertemente causal y sea K ⊂ M compacto, entonces toda
curva causal λ contenida dentro de K debe tener puntos finales futuros y pasados en
K.
10
Estructura causal
O
V
p
Γ
Figura 1.4: La curva causal Γ intersecta en un único punto a la subvecindad V
Demostración Sea t ∈ (−∞, ∞) el parámetro asociado a la curva λ. Sea {ti } una
secuencia de números creciente que diverge a infinito, y sea pi := λ(ti ). Ya que λ ∈ K,
se tiene que {pi } es una secuencia en K, por lo que existe un punto de acumulación
p ∈ K ya que K es compacto.
Supóngase que es posible encontrar una vecindad abierta O de p tal que no existe
t0 ∈ R para el cual λ(t) ∈ O para todo t > t0 . En consecuencia lo mismo será válido
para cualquier vecindad abierta V ⊂ O. Esto significa que λ entra en V más de una
vez, ya que infinitamente varios puntos de la secuencia {λ(ti )} entran en V pero λ(t)
no permanece en V . Esto contradice la condición de causalidad fuerte en p, por lo que
p es un punto final futuro de λ.
O
V
λ(ti )
p
Del mismo modo, un punto final pasado q ∈ K de λ existe.
Observación Que no exista t0 ∈ R para el cual λ(t) ∈ O para todo t > t0 , significa
que existe un t∗ tal que λ(t∗ ) ∈
/ O.
Observación Causalidad fuerte puede ser satisfecha sin embargo una modificación de
gab en una vecindad arbitrariamente pequeña de dos o más puntos puede producir curvas
causales cerradas.
La condición de causalidad fuerte no expresa de manera adecuada la condición de
que se este a punto de producir una violación de causalidad. Sea ta un vector de tipo
1.2 Condiciones de causalidad
11
tiempo en p ∈ M, y defı́nase en p ∈ M
g̃ab := gab + ta tb ,
(1.2.1)
donde gab es la métrica en M. Se tiene entonces que el cono de luz asociado a g̃ab es
estrictamente más grande (como conjunto) que el correspondiente a gab , i.e., todo vector
nulo o tipo tiempo de gab es un vector tipo tiempo con respecto a g̃ab ya que
g̃ab T a T b = gab T a T b + (ta T a )2 > 0,
(1.2.2)
sin importar que T a sea nulo o tipo tiempo. Ahora bien, si un espacio-tiempo estuviese
a punto de tener curvas causales cerradas, al abrir el cono de luz en cada punto serı́a
posible producir curvas causales cerradas. Esto conlleva a
Definición 1.2.2 Un espacio-tiempo (M, gab ) se dice que es establemente causal si
existe un campo vectorial ta tipo tiempo, no nulo, continuo tal que (M, g̃ab ), con g̃ab
definido anteriormente, no posee curvas causales cerradas.
Observación La condición de ser establemente causal es equivalente a la existencia de
una función de tiempo global.
Teorema 1.2.2 Un espacio-tiempo (M, gab ) es establemente causal si y sólo si existe
una función diferenciable f en M tal que ∇a f es un campo vectorial tipo tiempo dirigido
al pasado.
Demostración Primero mostraremos que si la función f existe entonces (M, gab ) es
establemente causal. Para ello necesitamos lo siguiente:
Observación Supóngase que ∇a f es un campo vectorial tipo tiempo dirigido al pasado,
entonces a lo largo de toda curva tipo tiempo dirigida al pasado con vector tangente
v a se tiene gab v a ∇b f < 0, i.e., v(f ) < 0. En consecuencia f decrece estrictamente a lo
largo de toda curva tipo tiempo dirigida al pasado, i.e., f no puede regresar a su valor
inicial por lo que no puede haber curvas tipo tiempo cerradas en (M, gab ).
Ahora se procederá a utilizar la observación anterior para el caso de (M, g̃ab ). Sea
ta := ∇a f y g̃ab := gab +ta tb . La métrica inversa g̃ ab puede escribirse como g̃ ab = g ab +f ab ,
donde f ab debe determinarse a través de la condición g̃ ab g̃bc = δca , que se escribe como
tc ta = f ab (gcb + tc tb ).
(1.2.3)
Es fácil ver que la solución a esta ecuación esta dada por f ab = ta tb /(1 + tc tc ), y en
consecuencia
ta tb
g̃ ab = g ab +
.
(1.2.4)
1 + tc tc
12
Estructura causal
Por lo tanto,
g̃ (∇a f )(∇b f ) = g ab +
ab
ta tb
1 + tc tc
ta tb =
ta ta
> 0,
1 + tb tb
(1.2.5)
ya que ta ta > 0 (tipo tiempo). En consecuencia g̃ ab (∇b f ) es un vector tipo tiempo
con respecto a la métrica g̃ab y usando el argumento del párrafo inicial, se deduce
entonces que no existe una curva tipo tiempo cerrada en (M, g̃ab ), por lo que (M, g̃ab )
es establemente causal.
Ahora mostraremos que si (M, gab ) es un espacio-tiempo establemente causal entonces existe una función f con las propiedades indicadas en el teorema. En primer
lugar, debido a la paracompacidad de M, es posible definir una medida de volumen
continua, µ, en M tal que µ[M] < ∞. Defı́nase
F (p) := µ[I − (p)],
(1.2.6)
para un punto p ∈ M. Entonces F se incrementa estrictamente a lo largo de todas las
curvas causales dirigidas al futuro con vector tangente no nulo y constituye un prototipo
de una función global de tiempo.
La función F no es necesariamente continua, sin embargo se puede obtener una
función continua promediando sobre espacio-tiempos cercanos con conos de luz abiertos.
Sea t̃a un campo vectorial tipo tiempo tal que g̃ab no tiene curvas tipo tiempo cerradas.
Para 0 ≤ α ≤ 1 sea
(gα )ab := gab + αta tb ,
(1.2.7)
y
Fα (p) := µ[Iα− (p)],
(1.2.8)
donde Iα− (p) es el pasado cronológico de p con respecto a la métrica (gα )ab . Promediando Fα sobre los valores permitidos de α se obtiene una función continua la cual se
incrementa estrictamente a lo largo de curvas causales. Esta función puede a su vez ser
suavizada para obtener una función diferenciable [2].
Corolario 1.2.3 En un espacio-tiempo (M, gab ), la condición de causalidad estable implica causalidad fuerte.
Demostración Sea f una función global de tiempo en M. Dado cualquier p ∈ M
y cualquier vecindad abierta O de p, es posible escoger una vecindad abierta V ⊂ O
de p de tal forma que el valor lı́mite de f en toda curva causal dirigida al futuro que
abandone V sea mayor que el valor lı́mite de f en toda curva causal dirigida al futuro
que ingrese a V .
1.3 Dominios de dependencia e hiperbolicidad global
13
O
fp2 > fp1
fp2
p
fp1
V
Por lo tanto, ya que f se incrementa a lo largo de toda curva causal dirigida al
futuro, ninguna curva causal puede entrar V dos veces, caso contrario, se tendrı́a que
fp1 > fp2 con p2 ∈ J + (p1 ), lo cual es una contradicción.
Observación Que un espacio-tiempo sea establemente causal significa que el espaciotiempo no esta a punto de mostrar una conducta causal mal definida.
1.3.
Dominios de dependencia e hiperbolicidad global
Definición 1.3.1 Sea S ∈ M un conjunto acronal y cerrado. El borde de S, Borde(S),
es el conjunto de puntos p ∈ S tales que toda vecindad abierta O de p contiene un
punto q ∈ I + (p), un punto r ∈ I − (p), y una curva tipo tiempo λ de r a q la cual no
intersecta S.
O
q
S
p
r
Figura 1.5: El punto p pertenece al borde del conjunto S
Teorema 1.3.1 Sea S un conjunto cerrado acronal no vacı́o con borde Borde(S) = {∅},
entonces S es una subvariedad continua, tridimensional, incrustada en M.
Demostración Similar al Teorema 1.1.10.
Definición 1.3.2 Sea S un conjunto cerrado, acronal (con borde posiblemente). El
dominio de dependencia futuro se define como el conjunto
D + (S) := {p ∈ M| toda curva causal sin fin pasada a través de p intersecta S}.
(1.3.1)
14
Estructura causal
D + (S)
S
Figura 1.6: Dominio de dependencia D + (S) del conjunto S
Observación S ⊂ D + (S) ⊂ J + (S), y ya que S es acronal, D + (S) ∩ I − (S) = {∅}.
Observación D + (S) es de intéres ya que cualquier señal enviada a p ∈ D + (S) debe
haberse producido en S. Si se diera información apropiada sobre las condiciones iniciales
en S, serı́a posible predecir lo que sucede en p ∈ D + (S). De modo inverso, si p ∈ I + (S)
pero p ∈
/ D + (S), serı́a posible enviar una señal a p sin influir en S, y el conocimiento
de las condiciones iniciales en S no bastarı́a para determinar las condiciones posteriores
en p.
Definición 1.3.3 El dominio de dependencia pasado es el conjunto
D − (S) := {p ∈ M| toda curva causal sin fin futura a través de p intersecta S}.
(1.3.2)
Definición 1.3.4 El dominio total de dependencia de S es el conjunto
D(S) = D + (S) ∪ D − (S).
(1.3.3)
Este conjunto representa un conjunto de eventos para los cuales todas las condiciones
deben ser determinadas a partir de las condiciones iniciales dadas en S.
Definición 1.3.5 Un conjunto Σ cerrado, acronal, para el cual D(Σ) = M se denomina
una superficie de Cauchy.
Observación De la definición de Σ se tiene que toda curva causal sin fin intersecta Σ:
D(Σ) = M = D + (Σ) ∪ D − (Σ), Σ cerrado y acronal.
Observación Usando la observación anterior, se tiene que Borde(Σ) = {∅} si Σ es de
Cauchy, lo que implica que Σ es una subvariedad continua de M.
Observación Un espacio-tiempo (M, gab ) es globalmente hiperbólico si posee una superficie de Cauchy.
Observación Σ representa un instante de tiempo (acronalidad). El futuro y pasado
del universo pueden ser ası́ predicho a partir de las condiciones al instante de tiempo
de Σ. En espacios no globalmente hiperbólicos la predictibilidad no esta garantizada.
1.3 Dominios de dependencia e hiperbolicidad global
15
Proposición 1.3.2 p ∈ D + (S) si y sólo si toda curva tipo tiempo sin fin pasada de p
intersecta S.
Demostración ⇒: Si existe una curva tipo tiempo sin fin pasada de p la cual no
intersecta S, lo mismo debe ser válido para una vecindad abierta O de p. En ese caso
O ∩ D + (S) = {∅}
y ası́
p∈
/ D + (S).
(1.3.4)
⇐: Supóngase que toda curva sin fin pasada de p intersecta S, entonces
1. p ∈ S ⊂ D + (S) ⊂ D + (S), o
2. p ∈ I + (S).
Si p ∈ I + (S), sea q ∈ I − (p) ∩ I + (S) y supóngase que una curva causal sin fin pasada λ
de q no intersecta S.
Entonces
1. λ ∈ I + (S), o
2. λ intersecta ∂I + (S) en r ∈
/ S.
En ambos casos es posible construir una curva tipo tiempo sin fin pasada desde p la
cual no intersecta S:
1. usando el Teorema 1.1.3 se tiene que existe una curva tipo tiempo γ ⊂ I + (λ) ⊂
I + (S),
p
γ
q
λ
S
2. usando el Lema 1.1.11 se tiene que existe una curva γ tipo tiempo de p a r ∈
∂I + (S), la cual se extiende arbitrariamente en el pasado.
El que esta curva exista implica una contradicción con la hipótesis de que toda curva
tipo tiempo sin fin pasada de p intersecta S. En consecuencia, si q ∈ I − (p) ∩ I + (S) se
tiene necesariamente que q ∈ D + (S). Ya que toda vecindad de p ∈ I + (S) intersecta
I − (p) ∩ I + (S) esto implica que p ∈ D + (S).
Lema 1.3.3
Int[D + (S)] = I − [D + (S)] ∩ I + (S),
&
Int[D(S)] = I − [D + (S)] ∩ I + [D − (S)].
(1.3.5)
16
Estructura causal
p
γ
q
λ
r
S
Proposición 1.3.4 Sea Σ una superficie de Cauchy y sea λ una curva causal sin fin,
entonces λ intersecta Σ, I + (Σ) e I − (Σ).
Demostración Supóngase que λ no intersecta I − (Σ). Por el Lema 1.1.11 existe una
curva tipo tiempo sin fin pasada γ ∈ I + (λ) ⊂ I + [Σ∪I + (Σ)]. Si se extiende γ indefinidamente al futuro, no puede intersectar Σ o la propiedad de acronalidad se perderı́a. Ya
que toda curva causal sin fin intersecta Σ, no existe una tal curva γ. Por lo tanto λ
debe entrar en I − (Σ). Del mismo modo, λ debe entrar en I + (Σ).
Definición 1.3.6 Sea S un conjunto acronal cerrado. El horizonte de Cauchy futuro
de S, H + (S), se define como
H + (S) := D + (S) − I − [D + (S)].
(1.3.6)
H + (S)
D + (S)
S
Figura 1.7: Horizonte de Cauchy H + (S) del conjunto S
Definición 1.3.7 Sea S un conjunto acronal cerrado. El horizonte de Cauchy pasado
de S, H − (S), se define como
H − (S) := D − (S) − I + [D − (S)].
(1.3.7)
Observación H + (S) y H − (S) miden la desviación de la superficie S para que ésta sea
considerada una superficie de Cauchy.
Observación H + (S) es cerrado ya que H + (S) = D + (S) ∩ [M − I − [D + (S)]]. Además
I − [H + (S)] ⊂ I − [D + (S)] = I − [D + (S)] ⊂ M − H + (S), lo que implica que I − [H + (S)] ∩
H + (S) = {∅}, por lo que H + (S) es acronal.
1.3 Dominios de dependencia e hiperbolicidad global
17
Observación H + (S) es una porción de la frontera del pasado del conjunto D + (S),
i.e., H + (S) = [I + (S) ∪ S] ∩ ∂I − [D + (S)].
Teorema 1.3.5 Todo punto p ∈ H + (S) se encuentra sobre una geodésica nula λ contenida completamente dentro de H + (S), la cual es sin fin en el pasado o tiene un punto
final en Borde(S).
Demostración Sea p ∈ H + (S) con p ∈
/ Borde(S). Entonces
1. p ∈ I + (S), o
2. p ∈ S pero p ∈
/ Borde(S).
Caso 1.
Ya que p ∈
/ I − [D + (S)], entonces para todo q ∈ I + (p) existe una curva causal sin
fin en el pasado desde q la cual no intersecta S. Sea {qn } una secuencia de puntos en
I + (p) la cual converge a p, y sea {λn } una secuencia de curvas sin fin en el pasado que
no intersectan S. Ya que p es un punto lı́mite de la secuencia {λn }, por el Lema 1.1.12
existe una curva lı́mite causal sin fin en el pasado λ, de las {λn }, la cual pasa por el
punto p.
qn
p
H + (S)
λn
D + (S)
S
Asúmase que λ entra en el conjunto abierto I + (S) ∩ I − [D + (S)] ⊂ D + (S). Entonces
lo mismo pasarı́a con λn para n suficientemente grande, lo cual es una contradicción
ya que λn ∩ D + (S) = {∅} (que λn no intersecte a S implica que λn * D + (S)). En
particular, ya que I − (p) ⊂ I − [D + (S)] = I − [D + (S)], se tiene que dentro de I + (S), λ
es una curva causal dirigida al pasado desde p, la cual no entra en I − (p). Por lo tanto,
usando el corolario al Teorema 1.1.3, dentro de I + (S), λ debe ser una geodésica nula.
Además, si una curva temporal dirigida al pasado desde un punto en λ ∩ I + (S) no
intersectará S, se podrı́a construir una curva tipo tiempo dirigida al pasado desde p con
la misma propiedad, i.e., no habrı́a intersección con S. Ya que p ∈ D + (S), esto serı́a una
contradicción con la Proposición 1.3.2, en consecuencia se tiene que [λ∩I + (S)] ⊂ D + (S).
Por lo tanto [λ ∩ I + (S)] ⊂ H + (S). De este modo, desde todo p ∈ H + (S) ∩ I + (S) es
posible obtener un segmento geodésico nulo dirigido al pasado, λ, no trivial contenido
en H + (S).
Caso 2.
18
Estructura causal
Sea p ∈ S pero p ∈
/ Borde(S). Usando la definición de Borde(S), se tiene que
existe una vecindad abierta O tal que ninguna curva causal contenida en O desde
un punto q ∈ I + (p) ∩ O puede entrar en I − (S) ∩ O sin intersectar S. El argumento
estableciendo la existencia de una geodésica nula no trivial desde p contenida en H + (S)
es similar al usado en el caso anterior. Esto implica [λ ∩ I + (S)] ⊂ D + (S), por lo que
[λ ∩ I + (S)] ⊂ H + (S). En consecuencia, es posible obtener un segmento geodésico nulo
dirigido al pasado, λ, no trivial contenido en H + (S).
O
q
p
r
S
Finalmente para ver que la geodésica nula es sin fin o bien tiene un punto final
pasado, asúmase que una geodésica nula dirigida al pasado deja H + (S), i.e., supóngase
que la porción de λ contenida en H + (S) tiene un punto final r. Ya que H + (S) es
cerrado, se tiene que r ∈ H + (S). Si r ∈
/ Borde(S), entonces es posible encontrar un
segmento de geodésica nula dirigida al pasado no trivial λ′ en H + (S), iniciando desde
r (ya que Borde(S) involucra curvas tipo tiempo).
λ
γ
r
λ′
S
Sin embargo si λ′ no fuera una continuación de λ, entonces por el corolario al
Teorema 1.1.3 se podrı́a encontrar una curva γ tipo tiempo conectando un punto de λ
a un punto de λ′ . Esto vioları́a la acronalidad de H + (S), por lo que λ no puede tener
un punto final pasado excepto en Borde(S).
Definición 1.3.8 El horizonte de Cauchy completo de un conjunto acronal S se define
como
H(S) := H + (S) ∪ H − (S).
(1.3.8)
Proposición 1.3.6 H(S) = ∂D(S).
Demostración
H(S) = H + (S) ∪ H − (S) = [D + (S) − I − [D + (S)]] ∪ [D − (S) − I + [D − (S)]]
= D + (S) ∪ D − (S) − [I − [D + (S)] ∩ I − [D − (S)]]
= D + (S) ∪ D − (S) − Int[D(S)] = D(S) − Int[D(S)] = ∂D(S).
(1.3.9)
1.3 Dominios de dependencia e hiperbolicidad global
19
Corolario 1.3.7 Si M es conexo, entonces un conjunto no vacı́o cerrado acronal Σ es
una superficie de Cauchy para (M, gab ) si y sólo si H(Σ) = {∅}.
Demostración Si ∂D(Σ) = {∅}, entonces D(Σ) = Int[D(Σ)] = D(Σ), por lo que D(Σ)
es abierto y cerrado a la vez. Por lo tanto, ya que D(Σ) ⊃ Σ 6= {∅} con M conexo, se
tiene que D(Σ) = M.
Teorema 1.3.8 Si Σ es un conjunto cerrado, acronal, sin borde, entonces Σ es una
superficie de Cauchy si y sólo si toda geodésica nula sin fin intersecta Σ y entra en los
conjuntos I + (Σ) e I − (Σ).
Demostración ⇒: Caso especial de Proposición 1.3.4.
⇐: Es necesario mostrar que si Σ no es una superficie de Cauchy, entonces al menos
una geodésica nula no entra en I + (Σ) o I − (Σ): si Σ no es una superficie de Cauchy,
entonces H(Σ) 6= {∅}, lo que implica H + (Σ) 6= {∅} o H − (Σ) 6= {∅} (a menos que M
sea disconexo y Σ no intersecte una componente de M, en cuyo caso el resultado es
trivial).
Si H + (Σ) 6= {∅}, entonces ya que Borde(Σ) = {∅}, se tiene que existe una geodésica
nula sin fin pasada la cual permanece por siempre en H + (Σ) (Teorema 1.3.5), y por lo
tanto nunca entra en I − (Σ).
H + (Σ)
q
r
Σ
Además, si se extiende esta geodésica hacı́a el futuro, esta nunca entrará en I − (Σ)
o sino la acronalidad de Σ se perderı́a.
Observación Sea (M, gab ) un espacio-tiempo globalmente hiperbólico con superficie
de Cauchy Σ. Se puede ver que no existen en este caso curvas tipo tiempo cerradas en
M, ya que una tal curva intersectando Σ vioları́a la acronalidad de Σ, mientras que una
curva tipo tiempo (o causal) cerrada que no intersecte Σ vioları́a hiperbolicidad global,
ya que se podrı́a seguir esta curva vuelta tras vuelta para definir ası́ una curva sin fin
la cual no intersecta Σ.
Teorema 1.3.9 Sea (M, gab ) un espacio-tiempo globalmente hiperbólico, entonces (M, gab )
es fuertemente causal.
20
Estructura causal
Demostración En un espacio-tiempo globalmente hiperbólico con superficie de Cauchy
Σ, se tiene M = I + (Σ) ∪ Σ ∪ I − (Σ). Asúmase que causalidad fuerte fuera violada en
p ∈ I + (Σ). De la definición de causalidad fuerte se sigue que es posible encontrar una
vecindad normal convexa U de p contenida en I + (Σ), u una familia de conjuntos abiertos
anidados On ⊂ U, los cuales convergen a p y tales que para cada n se pueda encontrar
una curva λn tipo tiempo dirigida al futuro, la cual inicie en On , salga de U y termine
en On .
U
λn
p
On
λn
Usando el Lema 1.1.12, se podrı́a entonces encontrar una curva lı́mite λ que pase
por p. Aunque cada una de las curvas λn es sin fin, es claro que λ debe ser una curva
sin fin o bien una curva causal cerrada que pase por p, en cuyo caso se puede hacer
sin fin al seguirla vuelta tras vuelta. Ya que ninguna de las curvas λn puede entrar en
I − (Σ), o la acronalidad de Σ se vioları́a, λ no puede entrar en I − (Σ). Sin embargo, esto
contradice la Proposición 1.3.4, por lo tanto causalidad fuerte no puede ser violada en
p ∈ I + (Σ) (o en p ∈ I − (Σ)).
λn
λ
I + (Σ)
Σ
I − (Σ)
λ
λn
Si p ∈ Σ, se puede escoger la secuencia {On } de modo que cualquier curva tipo
tiempo dirigida al futuro iniciando en On , deje esta vecindad en I + (Σ). se tendrı́a
entonces que la curva lı́mite λ no debe entrar I − (Σ), lo cual es una contradicción.
Teorema 1.3.10 Sea (M, gab ) globalmente hiperbólico, entonces (M, gab ) es establemente causal. Además, una función global de tiempo f puede escogerse tal que cada
superficie f = const., sea una superficie de Cauchy. Por lo tanto M puede ser foliado
por medio de superficies de Cauchy y la topologı́a de M es R × Σ, donde Σ denota una
superficie de Cauchy.
Demostración La demostración de este resultado consiste de distintos pasos [7].
1.3 Dominios de dependencia e hiperbolicidad global
21
1. Escogase un elemento de volumen dV en M tal que el volumen total de M es
igual a la unidad. Ya que M es métrico, lo cual implica que es paracompacto [8]
y por lo tanto triangulable [9], esto siempre es posible.
2. El elemento de volumen pasado de un punto p se define como
Z
−
V (p) :=
dV > 0,
(1.3.10)
I − (p)
y de modo similar se define el elemento de volumen futuro V + (p).
Estos elementos satisfacen las siguientes propiedades:
En la ausencia de curvas cerradas tipo tiempo, V − (V + ) es estrictamente
creciente a lo largo de cada curva tipo tiempo dirigida al futuro (dirigida al
pasado).
γ
p
I − (p)
Demostración Si no existan curvas tipo tiempo cerradas, y si p ∈ I − (q),
entonces I − (p) ⊂ I − (q), por lo que V − (p) < V − (q).
Observación El hecho de que V − (V + ) sea estrictamente creciente (decreciente) es una condición necesaria y suficiente para que no existan curvas
tipo tiempo cerradas, ya que si p y q están sobre una curva tipo tiempo
cerrada, entonces I − (p) = I − (q).
p
q
γ
I − (p) = I − (q)
Cuando (M, gab ) es globalmente hiperbólico, entonces V + y V − son funciones
continuas en toda la variedad M.
22
Estructura causal
Demostración Este resultado se obtiene al mostrar que V − (V + ) es semicontinua por arriba y semi-continua por debajo:
• Sea {pn } una secuencia en M, y sea p el punto lı́mite de esta secuencia.
Sea ∆V ⊂ M tal que ∆V ⊂ I − (q) para algún q ∈ I − (p). Entonces,
ya que pn → p, existe m tal que q ∈ I − (p) para todo n > m, i.e., ∆V
esta eventualmente contenido en los conjuntos abiertos I − (p). Ya que
I − (p) = ∪α∈I (∆V )α , se tiene que
lı́m inf V (pn ) ≥ V − (p).
(1.3.11)
• Sea ahora ∆V ⊂ M tal que ∆V ⊂ I + (q), para algún q tal que q no
pueda ser unido a p por medio de una curva causal dirigida al futuro.
Se desea mostrar que ∆V eventualmente esta afuera de los conjuntos
abiertos I − (pn ). Supóngase que este no es el caso, i.e., que existe un
número infinito de pn tales que ∆V ⊂ I − (pn ). Entonces q ∈ I − (pn ) para
un número infinito de pn .
p1
pn
p
q
∆V
Escogase ahora cualquier punto q ′ ∈ I + (p). Ya que pn → p, los puntos pn
eventualmente están en I − (q ′ ). Para cada n tal que pn ∈ I − (q ′ ) ∩ I + (q),
se tiene una curva tipo tiempo γn de q ′ a q pasando por pn . Ya que M
es globalmente hiperbólico, esta secuencia de curvas tipo tiempo de q ′ a
q tiene una curva lı́mite Γ.
q′
γn
Γ
p1
p
pn
q
Ya que los pn → p, esta curva lı́mite Γ pasa por el punto p, contradiciendo
la hipótesis de que p y q no pueden ser unidos por medio de una curva
1.3 Dominios de dependencia e hiperbolicidad global
23
causal dirigida al futuro. Por lo tanto, la hipótesis de que ∆V ⊂ I − (pn )
es falsa, por lo que ∆V esta eventualmente afuera del conjunto I − (pi ),
i.e., existe m tal que ∆V ∩ I − (pn ) = {∅} para n > m.
Finalmente, ya que Int[M − I − (p)] = ∪α∈I (∆V )α , se deduce que
lı́m sup V (pn ) ≤ V − (p).
(1.3.12)
n
En consecuencia V − es una función continua en toda la variedad M.
Observación El procedimiento anterior puede ser clarificado mediante
la visualización de las definiciones
∞
lı́m inf Xn := ∪∞
n=1 (∩m=n Xm ),
(1.3.13)
∞
lı́m sup Xn := ∩∞
n=1 (∪m=n Xm ).
(1.3.14)
y
3. Con el volumen normalizado de M, se define la superficie de Cauchy siguiente
Σ := {p ∈ M|V + (p) = V − (p)}.
(1.3.15)
4. Se define ası́ mismo la familia de superficies Sτ
Sτ := {p ∈ M|τ = V + (p) ≤ V − (p)}.
(1.3.16)
S7
S3
Σ
Cada Sτ es un conjunto acronal en D + (S), y exactamente una de las superficies
Sτ pasa a través de cada punto de D + (S).
24
Estructura causal
5. Se tiene que el conjunto
Cτ := I − (Sτ ) ∩ I + (Σ),
(1.3.17)
es compacto.
Cτ
Σ
6. Definición 1.3.9 Sea G el conjunto de todas las métricas en M de signatura
Lorentziana. Se dice que h′ab > hab , si todo vector el cual es tipo tiempo o nulo con
respecto a hab es estrictamente tipo tiempo con respecto a h′ab . Se dice entonces que
los conos de luz asociados a h′ab están más abiertos que aquellos de hab . Comparar
con la Ecuación (1.2.1).
Definición 1.3.10 Se dice que una familia de superficies es estrictamente tipo
espacio con respecto a una métrica hab en un punto p, si existe una vecindad
abierta O de p y una métrica h′ > hab , definida en O, tal que dos puntos de una
única superficie no pueden ser unidos por una curva tipo tiempo con respecto a
h′ , y contenida en O.
7. Σ y las superficies Sτ pueden ser reemplazadas por superficies estrictamente de
tipo espacial con respecto a la métrica gab , entonces, ya que M es paracompacto,
existe una métrica hab > gab tal que Σ y Sτ son estrictamente tipo espacio con
respecto a hab .
Observación Sean S, S ′ dos superficies de Cauchy tales que S ′ ⊂ D + (S). Defı́nase
S̃ := Σ(S, S ′ ), donde
Σ(S, S ′ ) := {p ∈ M|d(p, S) = d(p, S ′), p ∈ D + (S) ∩ D − (S ′ )},
(1.3.18)
con d(p, S) es la longitud asociada a una geodésica tipo tiempo de p ∈ D + (S) −
H + (S) a S. Defı́nase también
S̃τ := Σ(Wτ 2 , Wτ ) − S̃,
donde Wτ := (Sτ ∪ S̃) − I − (Sτ ∪ S̃), es una superficie de Cauchy.
(1.3.19)
1.3 Dominios de dependencia e hiperbolicidad global
25
8. Sea p ∈ Sτ0 , y sea γ una curva desde p dirigida al pasado, de tipo tiempo con
respecto a hab y sin punto final pasado. Ya que las superficies Sτ son estrictamente
tipo tiempo con respecto a hab , el parámetro τ es estrictamente creciente hacı́a el
pasado a lo largo de γ. Por lo tanto, ya que Cτ0 es compacto, y ya que γ no tiene
punto final pasado, se tiene que γ debe abandonar Cτ0 .
9. La frontera del conjunto Cτ0 consiste de Sτ0 y ciertos puntos de la superficie de
Cauchy Σ. Ya que el punto de emergencia de γ no puede ser Sτ0 , caso contrario τ
no se incrementarı́a a lo largo de γ, se tiene que γ intersecta a Σ.
Sτ0
p
Σ
γ
10. Una construcción similar puede realizarse para p ∈ D − (S), por lo que se obtiene
una métrica hab > gab , definida en M y respecto a la cual Σ es una superficie
de Cauchy. Por lo tanto Σ es una superficie de Cauchy con respecto a cualquier
métrica < hab , lo cual constituye un conjunto abierto en G que incluye a gab . En
consecuencia hiperbolicidad global implica estabilidad causal.
11. Para cada p ∈ M, defı́nase
f (p) :=
V − (p)
.
V + (p)
(1.3.20)
Entonces f es continua y cada superficie f = const., es un conjunto acronal
cerrado. Además, toda curva causal sin fin intersecta cada superficie f = const.,
i.e., V − (p) → 0 a lo largo de toda curva causal sin fin pasada y V + (p) → 0 a lo
largo de toda curva causal sin fin futura.
Demostración Sólo una reescritura de las propiedades de las superficies Sτ
definidas anteriormente.
12. Por lo tanto se tiene que M ∼
= R × Σ.
Observación Para una demostración alternativa de este teorema consultar [2].
Observación Hiperbolicidad global de (M, gab ) es equivalente a las siguientes condiciones
1. existencia de una superficie de Cauchy Σ [3],
26
Estructura causal
2. causalidad fuerte y C(p, q) un conjunto compacto para todo p, q ∈ M [10], donde
C(p, q) := { curvas causales continuas dirigidas al futuro de p a q },
(1.3.21)
3. causalidad fuerte y J + (p) ∩ J − (q) un conjunto compacto [2].
Ejercicios
1. De manera general se piensa que las singularidades que aparezcan como consecuencia del colapso gravitacional de un objeto masivo, no serán observables desde
el infinito, esto es, se encontrarán escondidas al interior del horizonte de un agujero negro. Que tal cosa suceda depende de la estructura del cono de luz del
espacio-tiempo considerado, la cual puede analizarse por medio de transformaciones conformes.
Considere la métrica de Minkowski
ds2 = dt2 − dr 2 − r 2 (dθ2 + sin2 θdφ2 ),
y muestre que con el cambio de coordenadas tan p = t+r, tan q = t−r, p−q ≥
0, esta métrica toma la forma
1 2
2
2
2
2
2
2
ds = sec p sec q dpdq − sin (p − q)(dθ + sin θdφ ) =: Ω−2 ds̃2 ,
4
donde ds̃2 es la métrica entre paréntesis. Se dice entonces que las métricas
ds2 y ds̃2 son conformes entre sı́, siendo el factor conforme la función Ω :=
sec2 p sec2 q.
Defina coordenadas t′ =
conforme toma la forma
1
(p
2
+ q), r ′ =
ds̃2 = dt′ 2 − dr ′ 2 −
1
(p
2
− q). Muestre que la métrica
1 2 ′
sin 2r (dθ2 + sin2 θdφ2 ),
4
correspondiente al universo estático de Einstein. Se tiene ası́ que el espacio de
Minkowski es conforme a la región limitada por las superficies nulas t′ − r ′ =
−π/2 y t′ − r ′ = π/2 (¿Porqué?).
2. Una variedad M equipada de una métrica gab se denomina asimptóticamente sim′
ple de manera débil, si existe un espacio asimptóticamente simple (M ′ , gab
) tal
+
′
−
′
′
que una vecindad de I (M ) y de I (M ) en M es isométrica con una vecindad similar en M. Muestre que la solución de Schwarzschild es asimptóticamente
simple de manera débil.
Capı́tulo 2
Singularidades
2.1.
Preliminares
Los teoremas de singularidades permiten mostrar que bajo ciertas condiciones, todo
espacio-tiempo posee una singularidad ya sea futura o pasada. Esto ha motivado el que
se considere a la teorı́a de la relatividad general como una teorı́a incompleta, debido a
que no permite una descripción consistente libre de singularidades, además de asumir
desde un inicio la existencia de una estructura para el espacio-tiempo. Estos aspectos
deben ser satisfactoriamente resueltos por una teorı́a de Gravedad Cuántica, y aún si
por el momento no se cuenta con dicha teorı́a, es posible indagar sobre la naturaleza
de las singularidades en relatividad general, tal como fue llevado a cabo en algunos
trabajos de Lifschitz y Kalatnikov [11].
Un aspecto interesante de los teoremas de singularidad reside en el hecho de que son
válidos para cualquier teorı́a que sea conforme a relatividad general, siempre y cuando
las hipótesis adicionales usadas sean también asumidas. Este resultado es la esencia del
siguiente teorema [12, 13, 14]
Teorema 2.1.1 Todas las teorı́as de gravitación basadas en acciones
1. tensorial-escalares,
2. de derivadas de orden superior, i.e, involucrando una función arbitraria suave
f (R) del escalar de curvatura R,
3. o de tipo cuerda,
son equivalentes mediante una transformación conforme, a la acción de Einstein-Hilbert
acoplada con campos escalares adicionales, los cuales tienen asociados potenciales de
auto-interacción particulares en cada caso.
Una consecuencia de este teorema es que cambios en las conclusiones de los teoremas
de singularidad que se verán más adelante, si algunos, pueden ser vistos como casos
especiales y no genéricos.
28
Singularidades
La aplicación de métodos globales, que permitan obtener conclusiones independientes del espacio-tiempo bajo estudio, requiere de un cierto número de definiciones y
conceptos que a continuación se detallan.
Definición 2.1.1 Un espacio-tiempo (M, gab ) es singular si posee al menos una curva
geodésica incompleta.
Las singularidades presentes en un espacio-tiempo pueden clasificarse de acuerdo a
las siguientes situaciones:
1. un escalar construido a partir del tensor de Riemann Rabcd y sus derivadas covariantes diverge a lo largo de una geodésica. Se dice que esto corresponde a una
singularidad de curvatura escalar,
2. una componente de Rabcd o sus derivadas covariantes en una tétrada propagada
paralelamente a lo largo de la geodésica de referencia diverge. Esto corresponde
a una singularidad de curvatura propagada paralelamente,
3. ningún escalar diverge, se tiene entonces una singularidad sin curvatura.
Definición 2.1.2 Un espacio-tiempo (M, gab ) sin fin es un espacio-tiempo que no es
isométrico a un subconjunto propio de otro espacio-tiempo.
Observación Que un espacio-tiempo sea geodésicamente incompleto no siempre corresponde a la noción de que existen “agujeros”en el espacio-tiempo debido a la extracción
de singularidades. Si un agujero esta presente, entonces la no completez debe ocurrir
para todo tipo de curvas geodésicas.
2.2.
Ecuación de Raychaudhuri: análogo Newtoniano
La ecuación de Raychaudhuri [15] constituye una herramienta útil en el ánalisis de
singularidades. Para entender el significado fı́sico de cada uno de los términos de esta
ecuación que se estudiará más adelante es deseable tomar en cuenta ciertos resultados
de mecánica clásica.
Sea ası́ R3 equipado con coordenadas xi y considérese un fluido que atraviesa una
cierta región. Sea vi (t, xj ) el campo de velocidad del flujo, diferenciable en todo punto
xi , y en todo instante t. Entonces se tiene que
dxj
= vj (t, yi)|yj =xj ,
dt
(2.2.1)
donde la variable xj en el lado izquierdo de esta ecuación representa la coordenada de
una partı́cula del fluido, y la variable yj corresponde a la coordenada de un punto en
el espacio, el cual esta siendo tomado como el punto con coordenadas xi .
2.2 Ecuación de Raychaudhuri: análogo Newtoniano
29
z
y
vi
{xi }
x
Considérese ahora el movimiento de una partı́cula P que al instante t se encuentra
en el punto con coordenadas xi con velocidad vi (t, xj ), y el movimiento de una partı́cula
vecina Q, que al mismo instante t se encuentra en xi + δxi y se mueve con velocidad
vi (t, xj + δxj ). En consecuencia la velocidad relativa de la partı́cula Q respecto a P esta
dada por
(~vQP )j (t) := vi (t, xj + δxj ) − vi (t, xj ) = vj,k (t, xi )δxk + . . . ,
(2.2.2)
al orden más bajo en δx. Se deduce entonces que la posición relativa de la partı́cula Q
con respecto a P al instante t + ∆t se expresa como
δx′j = δxj + (~vQP )j ∆t + · · · = δxj + vj,k δxk ∆t + . . .
(2.2.3)
Ya que la cantidad vi,j se transforma como un tensor, es posible descomponerla de
acuerdo a
1
vj,k = σjk + ωjk + δjk θ,
(2.2.4)
3
donde
1
ωjk := v[j,k].
(2.2.5)
θ := vj,j ,
σjk := v(j,k) − δjk θ,
3
Para entender el significado de cada una de estas cantidades se pueden considerar los
siguientes casos particulares:
1. σjk = ωjk = 0 6= θ
En este caso se tiene que
δx′j
1
= δxj 1 + θ∆t + . . . ,
3
(2.2.6)
−→
−→
por lo que el vector P Q al tiempo t + ∆t posee la misma dirección que P Q al
tiempo t pero distinta magnitud. Se tiene además que
θ=3
d
ln |δ~x|,
dt
(2.2.7)
y en consecuencia las partı́culas se alejan para valores de θ > 0, o se acercan si
−→
θ < 0 a lo largo de P Q. Este tipo de movimiento se denomina expansión isotrópica
y θ se conoce como el escalar de expansión.
30
Singularidades
2. θ = σjk = 0 6= ωjk
Ya que
δx′j = δxj + ωjk δxk ∆t = (δjk + ωjk ∆t)δxk + . . . ,
(2.2.8)
se deduce que en este caso
3
X
(2.2.9)
(δx′i − δxi )δxi = O((∆t)2 , (δ~x)3 ).
(2.2.10)
:=
j=1
y además
3
X
δx2j + . . . ,
δl
′2
δx′j 2
=
j=1
Estas expresiones describen un movimiento rotacional, por lo que se infiere que
la partı́cula Q gira alrededor de P . El vector de velocidad angular ~ω asociado se
obtiene a partir de la ecuación
~ v = ωjk δxk ,
~vQP = ~ω × δ~x = (δ~x · ∇)~
(2.2.11)
cuya solución esta dada por
1~
1
~ω = ∇
× ~v = ,
o en componentes
2
2
1
1
ωi = ǫijk vk,j = − ǫijk ωjk .
2
2
(2.2.12)
Las cantidades ωij constituyen el tensor de rotación y
1
ω 2 := ~ω · ~ω = ωij ωij ,
(2.2.13)
2
se denomina el escalar de rotación, el cual se anula si ωij = 0.
3. θ = ωjk = 0 6= σjk
Considérense 3 partı́culas Q1 , Q2 y Q3 en la vecindad de P , con posiciones relativas
al tiempo t dadas por δ~x, δ~y y δ~z respectivamente. El volumen δV generado por
estos 3 vectores esta dado por
δV = δ~x · (δ~y × δ~z ) = ǫijk δxi δyj δzk .
(2.2.14)
′
Al tiempo t + ∆t se tiene que el volumen generado por los vectores δ~x , δ~y ′ y δ~z′
es
δV ′ = δV + (ǫimn σil + ǫljn σjm + ǫlmk σkn )δxl δym δzn ∆t + · · · =: δV + D∆t + . . .
(2.2.15)
Usando el hecho de que σij = σji y que σii = 0, se puede ver que D se anula. En
consecuencia no hay cambio en el volumen ∆V al tiempo t + ∆t, sin embargo su
forma cambia ya que las componentes σij δxj no están dirigidas a lo largo de δxi
Esto corresponde a un movimiento de distorsión, las cantidades σij siendo las
componentes del tensor de distorsión σij y
1
σ 2 := σij σij ,
(2.2.16)
2
siendo el escalar de distorsón.
2.3 Congruencias de geodésicas tipo tiempo
2.3.
31
Congruencias de geodésicas tipo tiempo
Definición 2.3.1 Sea M una variedad y O ⊂ M un conjunto abierto. Una congruencia
en O es una familia de curvas tales que a través de cada p ∈ O pasa precisamente una
curva de esta familia.
Observación Las tangentes a una congruencia producen un campo vectorial en O. De
manera inversa, todo campo vectorial continuo genera una congruencia de curvas. La
congruencia es suave (C ∞ ) si el campo vectorial lo es.
Considérese una congruencia suave de geodésicas tipo tiempo. Sea τ el tiempo propio
parametrizando a las geodésicas, de modo que el campo vectorial ξ a asociado, descrito
por las tangentes a las geodésicas, este normalizado (ξ a ξa = +1).
Defı́nase Bab := ∇b ξa , entonces
Bab ξ a = ξ a ∇b ξa = −ξa ∇b ξ a = 0,
(2.3.1)
usando la normalización de ξ a , y además
Bab ξ b = ξ b ∇b ξa = 0,
(2.3.2)
usando la ecuación de las geodésicas con vector tangente ξ a .
Sea ahora γs (τ ) una subfamilia uniparámetrica suave de geodésicas en la congruencia
y sea η a el vector de desviación (ortogonal) de γ0 en esta subfamilia. η a representa un
desplazamiento espacial infinitesimal de γ0 hacı́a una geodésica cercana en la subfamilia.
Se tiene entonces que £ξ η a = 0, por lo que
ξ b ∇b η a = η b ∇ b ξ a = B a b η b .
(2.3.3)
El objeto B a b da ası́ una medida de que tan alejado se encuentra η a de ser transportado
paralelamente a lo largo de ξ a .
Sea hab := gab − ξa ξb . Es claro que hab ξ b = 0, por lo que hab define una superficie
de tipo espacial. Defı́nase el operador de proyección sobre el subespacio perpendicular
al espacio tangente de ξ como ha b := g ac hab = δba − ξa ξb . De modo similar al caso
Newtoniano, defı́nanse las cantidades
θ := B ab hab ,
1
σab := B(ab) − hab θ,
3
ωab := B[ab] ,
(2.3.4)
correspondientes a la expansión, distorsión y rotación de las geodésicas respectivamente.
Es obvio entonces que
1
Bab = σab + ωab + hab θ.
(2.3.5)
3
Observación Las condiciones Bab ξ a = Bab ξ b = 0 y ξ[a ∇b ξc] = 0 (Teorema de Frobenius) implican que la congruencia es localmente una hiper-superficie ortogonal a ξ a si
y sólo si ωab = 0.
32
Singularidades
Ya que
0 = Bab ξ b = σab ξ b + ωab ξ b ,
(2.3.6)
0 = Bab ξ a = σab ξ a − ωba ξ a ,
(2.3.7)
y
se deduce que σab ξ b = ωab ξ b = 0. En consecuencia, a lo largo de cualquier geodésica en
la congruencia, se tiene que θ mide la expansión promedio de geodésicas infinitamente
cercanas, ωab mide su rotación y σab mide su distorsión, i.e., una esfera en el espacio
tangente transportada por medio de la derivada de Lie £ξ se distorsionarı́a en una
elipsoide con ejes principales dados por los eigenvectores de σ a b , con proporciones dadas
por los eigenvalores de σ a b .
Las ecuaciónes fundamentales en este contexto están dadas por ecuaciónes describiendo el comportamiento de las cantidades θ, ωab y σab asociadas a la congruencia de
geodésicas conforme se avanza a lo largo de ellas. Se tiene que
ξ c ∇c Bab = ξ c ∇c ∇b ξa = ξ c ∇b ∇c ξa + Rcbad ξ c ξ d
= ∇b (ξ c ∇c ξa ) − (∇b ξ c )(∇c ξa ) + Rcbad ξ c ξ d
= −B c b Bac + Rcbad ξ c ξ d .
(2.3.8)
Utilizando esta expresión se deduce que
ξ c ∇c θ = ξ c ∇c (Bab hab ) = −B c b Bac hab + Rcbad ξ c ξ d hab
1 c
1
c
c
= − σ b + ω b + θh b
σac + ωac + θhac hab + Rcbad ξ c ξ d g ab
3
3
1
= − θ2 − σab σ ab + ωab ω ab − Rab ξ a ξ b,
3
(2.3.9)
que se conoce como ecuación de Raychaudhuri [15].
Además,
1
c
c
ξ ∇c σab = ξ ∇c B(ab) − hab θ
3
1
1
= −B c (b Ba)c + Rc(ba)d ξ c ξ d − (ξ c ∇c hab )θ − (ξ c ∇c θ)
3
3
1
2
= − θσab − σac σ c b − ωac ω c b + hab (σcd σ cd − ωcd ω cd) + Ccbad ξ c ξ d
3
3
1
1
+ hac hbd Rcd − hab hcd Rcd ,
(2.3.10)
2
6
y también
ξ c ∇c ωab = ξ c ∇c B[ab] = −B c [b Ba]c + Rc[ba]d ξ c ξ d
2
= − ωab θ − 2σ c [bωa]c .
3
(2.3.11)
2.3 Congruencias de geodésicas tipo tiempo
33
Considérese el último término en la ecuación de Raychaudhuri (2.3.9), el cual puede
escribirse como
1
1
a b
a b
a b
Rab ξ ξ = 8π Tab − gab T ξ ξ = 8π Tab ξ ξ − T ,
(2.3.12)
2
2
donde se ha usado ξ a ξa = 1, ası́ como las ecuaciones de campo de Einstein. El término
Tab ξ a ξ b representa la densidad de energı́a asociada a la materia presente, la cual se asume
estrictamente no negativa para todo ξ a de tipo tiempo. Esta hipótesis se denomina
condición débil de energı́a. Por otro lado, cuando se asume que únicamente la suma
Tab ξ a ξ b − 12 T es estrictamente no negativa se obtiene la condición fuerte de energı́a.
Observación Si para todo ξ a tipo tiempo dirigido al futuro se tiene que T a b ξ b es
un vector tipo tiempo dirigido al futuro (o nulo), el cual representa la densidad de
corriente 4-dimensional de energı́a-momento visto por un observador moviéndose con
vector tangente ξ a , se dice que la condición dominante de energı́a es satisfecha. De este
modo, la velocidad del flujo de energı́a de la materia presente es siempre menor que la
velocidad de la luz.
Observación Es posible mostrar que si ∇b Tab = 0, y si la condición dominante de
energı́a es satisfecha con Tab nulo en un conjunto acronal cerrado S, entonces Tab se
anula también en D(S). Ademaás se cumple que dominante ⇒ débil, pero fuerte ;
débil (sin embargo, si Tab k a k b ≥ 0 para todo k a de tipo nulo, entonces fuerte ⇒ débil).
El tensor Tab es simétrico, pero gab es de signatura Lorentziana por lo que el mapeo
T a b : Vp → Vp , no es necesariamente diagonalizable. Se asume en general que todos los
Tab de relevancia fı́sica son diagonalizables, con cuatro distinto eigenvalores. Los eigenvectores de Tab correspondientes a estos eigenvalores son automáticamente diagonales,
mientras que eigenvectores pertenecientes a un eigenvector de multiplicad mayor que 1,
pueden escogerse de modo que sean ortogonales, por lo que
Tab = ρta tb + p1 xa xb + p2 ya yb + p3 za zb ,
(2.3.13)
donde {ta , xa , y a, z a } representa una base ortonormal con ta de tipo tiempo. El eigenvalor ρ corresponde a ala energı́a en reposo de la materia, mientras que p1 , p2 , p3 ,
son las presiones
principales presentes. En consecuencia se tiene que Tab ta tb = ρ, y
P3
T = ρ − a=1 pa , por lo que:
1. la condición débil de energı́a será satisfecha si ρ ≥ 0, para geodésicas tipo tiempo,
y ρ + pi ≥ 0, i = 1, 2, 3, para geodésicas nulas,
P
2. la condición fuerte de energı́a será válida si ρ + 3a=1 pa ≥, para geodésicas tipo
tiempo, y ρ + pi ≥ 0, i = 1, 2, 3, para geodésicas nulas.
34
Singularidades
Lo anterior es equivalente a decir que las condiciones de energı́a débil y fuerte serán válidas si la densidad de materia ρ es estrictamente no negativa y si las presiones negativas
que se presenten no sean lo suficientemente grandes en magnitud como para dominar
a ρ. Por otro lado, la condición de energı́a dominante se traduce en la desigualdad
ρ ≥ |pi |, i = 1, 2, 3.
La ecuación de Raychaudhuri puede escribirse como
dθ
1
= − θ2 − σab σ ab + ωab ω ab − Rab ξ a ξ b ,
dτ
3
(2.3.14)
donde τ es el tiempo propio a lo largo de la congruencia de curvas. De lo discutido anteriormente, se deduce que si la condición fuerte de energı́a es válida, y si las ecuaciones
de Einstein también lo son, entonces el último término (signo incluido) es estrictamente
negativo. Esto es un indicio de la naturaleza atractiva que posee la gravedad.
Si la congruencia de curvas es ortogonal a hiper-superficies (tipo espacio), entonces
el tensor de rotación ωab se anula. Se deduce entonces que
dθ 1 2
+ θ = −σab σ ab + ωab ω ab − Rab ξ a ξ b ≤ 0,
dτ
3
⇒
dθ−1
1
≥ ,
dτ
3
(2.3.15)
τ
y por ende θ−1 (τ ) ≥ θ0−1 + , con θ0−1 una constante. Asúmase que θ0−1 < 0 inicialmente,
3
esto es se tiene una congruencia de curvas que convergen en un inicio, entonces θ−1 (τ ) se
anula en un tiempo propio τ finito, i.e., θ(τ ) → −∞, en un tiempo propio τ ≤ 3|θ0 |−1 .
Se tiene ası́ el siguiente resultado
Lema 2.3.1 Sea ξ a el campo tangente de un congruencia de geodésicas de tipo tiempo, ortogonales a hiper-superficies (tipo espacio). Asumase que Rab ξ a ξ b ≥ 0, entonces
si la expansión θ toma un valor negativo θ0 en cualquier punto sobre una geodésica
perteneciente a la congruencia, se obtiene que θ → −∞ a lo largo de la geodésica en
un tiempo propio finito τ ≤ 3|θ0 |−1 .
Observación La singularidad de la expansión θ es una singularidad que ocurre al
nivel de la congruencia de curvas y no del espacio-tiempo, estableciendo el hecho de
que cáusticas se producirán en una congruencia si en algún lugar ocurre un fénomeno
de convergencia.
2.4.
Congruencias de geodésicas nulas
En el caso de congruencias de geodésicas tipo tiempo con vector tangente ξ a , se
estudiaron vectores de desviación η a los cuales permitieron definir la cantidad Bab . Una
primera motivación para esta elección reside en el hecho de que
ξ a ∇a (ξb η b ) = ξ a ξ b ∇b η b = ξb £ξ η b + η a ξb ∇a ξ b = 0,
(2.4.1)
2.4 Congruencias de geodésicas nulas
35
si la norma ξa ξ a es constante. Esto implica que ξa η a es una constante a lo largo de la
congruencia de curvas, por lo que la parte no ortogonal de η a , aquella que es proyectada
en la dirección de ξ a , no representa información fı́sica relevante. Además, los vectores
de desviación η a que difieren únicamente por un múltiplo del vector ξ a representan el
mismo vector ortogonal únicamente desplazado a lo largo de la congruencia. En este
caso si η ′ a = η a + αξ a , entonces los valores de η ′ a ξa y η a ξa no son independientes ya
que η ′ a ξa = η a ξa − α. La condición de ortogonalidad en η a fija ası́ de manera natural
una condición de norma en η a .
En el caso de una congruencia de geodésicas nulas de vector tangente k a , se tiene
de igual modo que
k a ∇a (kb η b ) = kb £k η b + η a kb ∇a k b = 0,
(2.4.2)
por lo que ka η a es una constante a lo largo de las geodésicas. En este caso el vector
de desviación puede descomponerse como η a = η̃ a + η̂ a , donde k a ∇a η̃ b = 0, η̃a k a 6= 0
y η̂a k a = 0. De acuerdo con esto, la parte no ortogonal de η a puede ser descartada
para considerar únicamente vectores que satisfagan ka η a = 0. Es claro además, que
vectores que satisfagan esta condición y que difieran únicamente por múltiplos de k a
corresponden al mismo desplazamiento ortogonal a lo largo de la congruencia.
Desde este punto de vista, los objetos relevantes para estudiar efectos fı́sicos corresponden a las clases de equivalencia
[η a ] := {η ′ a ∈ Vp | η ′ a = η a + αk a ,
α ∈ R}.
(2.4.3)
Sea Vp el espacio tangente a p ∈ M. Los vectores tangentes ortogonales a k a forman un
subespacio tridimensional Ṽp . Se define la clase de equivalencia de un vector xa ∈ Ṽp
como
[xa ] := {y a ∈ Ṽp | y a = xa + ck a ,
c ∈ R}.
(2.4.4)
El conjunto de clases de equivalencia de vectores en Ṽp define entonces el espacio vectorial V̂p de dimensión 2
V̂p := {y a ∈ Vp | y a = xa + ck a , con gab xa k b = 0}.
(2.4.5)
Observación ta ∈ Vp no da lugar a un vector tangente en Ṽp de manera canónica,
ya que no existe una manera natural de descomponer dicho vector en una suma de un
vector en Ṽp y un vector ortogonal a este espacio.
Si ta ∈ Ṽp , entonces existe un vector t̂a ∈ V̂p . Por otro lado si µa ∈ Vp∗ , entonces existe
µ̃a ∈ Ṽp∗ de modo canónico, i.e., µ̃a = µa |Ṽp . En consecuencia existe también µ̂a ∈ V̂p∗ si
y sólo si µ̃a k a = µa k a = 0. De manera más general, un tensor T a1 ...ak b1 bl actuando en el
espacio tangente Vp y su dual, da lugar a un tensor T̂ a1 ...ak b1 bl definido en V̂p , si y sólo
si la contracción de este tensor con k a en algunos de sus ı́ndices, mientras el resto de
ellos es contraı́do con vectores y sus duales en V̂p y V̂p∗ respectivamente, se anula siempre. Tensores T, T ′ que satisfacen esta propiedad cumplen de igual modo la condición
T\
⊗ T ′ = T̂ ⊗ T̂ ′ . Tensores para los cuales la contracción de alguno de sus ı́ndices con
a1 ...ai ...ak
...ak
k a o ka se anula satisfacen además la relación T a1 ...ai\
b1 ...bl µai = T̂
b1 ...bl µ̂ai .
36
Singularidades
La métrica gab satisface la condición mencionada en el párrafo anterior ya que
gab k a ξ b , ξ ∈ V̂p . En consecuencia gab se proyecta en la métrica ĥab , de signatura (-,
-) en V̂p .
Observación Es posible ver que h̃ab := gab |Ṽp no define una métrica, ya que h̃ab es una
forma bilineal degenerada.
Considérese una congruencia de geodésicas nulas de vector tangente k a , entonces
Bab := ∇b ka satisface Bab k b = Bab k a = 0, por lo que existe B̂ab tal que
1
B̂ab = σ̂ab + ω̂ab + θĥab .
2
con
θ := B̂ab ĥab ,
1
σ̂ab := B̂(ab) − θĥab ,
2
(2.4.6)
ω̂ab := B̂[ab] .
(2.4.7)
Por otro lado se tiene que
k c ∇c Bab + B c b Bac = Rcbad k c k d ,
(2.4.8)
\
k c ∇c B̂ab + B̂ c b B̂ac = Rcbad
kc kd ,
(2.4.9)
de modo que
lo que implica
dθ
1
= − θ2 − σ̂ab σ̂ ab + ω̂ab ω̂ ab − Rab k a k b ,
dλ
2
\
k c ∇c σ̂ab = −θσ̂ab + Ccbad
kc kd,
k c ∇c ω̂ab = −θω̂ab .
(2.4.10)
(2.4.11)
(2.4.12)
Ya que Rab k a k b = 8πTab k a k b , se tiene que si Tab k a k b > 0, entonces el último término
en (2.4.10) es negativo para todo k a tipo nulo. Si la condición fuerte de energı́a se
cumple, entonces por continuidad (todo vector nulo puede aproximarse por un vector
tipo tiempo), la condición Tab k a k b ≥ 0 se cumplirá también. Del mismo si la condición
débil de energı́a se cumple entonces Tab k a k b ≥ 0. En el caso de un tensor energı́amomento diagonalizable se tiene que esta condición se satisface si ρ + pi ≥ 0, para todo
k a tipo nulo.
Se tiene entonces el siguiente lema
Lema 2.4.1 Sea k a el campo vectorial tangente de una congruencia de geodésicas nulas
ortogonales a hiper-superficies (tipo espacio), i.e. ω̂ab = 0. Si Rab ξ a ξ b ≥ 0, entonces,
si la expansión θ toma un valor negativo θ0 en cualquier punto sobre una geodésica
perteneciente a la congruencia, se obtiene que θ → −∞, a lo largo de la geodésica en
un tiempo propio finito λ ≤ 2|θ0 |−1 .
2.5 Puntos conjugados
2.5.
37
Puntos conjugados
Definición 2.5.1 Sea M una variedad en la cual una conexión esta definida y sea γ
una geodésica con vector tangente v a . Una solución η a de la ecuación de desviación
geodésica
v a ∇a (v b ∇b η c ) = −Rabd c v a η b v d ,
(2.5.1)
se denomina un campo de Jacobi sobre γ.
Definición 2.5.2 Un par de puntos p, q ∈ γ se denominan conjugados, si existe un
campo de Jacobi η a , no trivial que se anula en p y q.
ηa
q
γ
va
p
Observación p, q ∈ γ son puntos conjugados si una geodésica “infinitesimalmente
cercana” intersecta γ en p y q.
Observación La definición anterior requiere únicamente la existencia de un campo
de Jacobi que se anule en los puntos p y q, no es necesario que exista otra geodésica
distinta de γ que pase por estos puntos. Del modo contrario, la existencia de una
geodésica γ ′ 6= γ que pase por p y q no implica que sean puntos conjugados o que algún
punto conjugado exista entre p y q.
2.5.1.
Criterios para la existencia de puntos conjugados
Sea γ una geodésica tipo tiempo con tangente ξ a , y sea p ∈ γ. Considérese la
congruencia de todas las geodésicas de tipo tiempo que pasan por p. La congruencia es
singular en este punto. Entonces todo campo de Jacobi que se anule en el punto p es
un vector de desviación para esta congruencia.
Se desea mostrar que q ∈ γ, q ∈ I + (p), es un punto conjugado a p, si y sólo si el
escalar de expansión θ de la congruencia tiende a −∞ en q. Sea {ea1 , ea2 , ea3 } una base
ortonormal de vectores espaciales ortogonales a ξ a (propagados paralelamente a lo largo
de γ).
La ecuación de desviación geodésica esta dada por
d2 η µ
= −Rαβν µ ξ α η β ξ ν .
2
dτ
(2.5.2)
38
Singularidades
ξa
ea3
ea1
p
ea2
γ
Esta ecuación debe ser resuelta con la condición inicial η α |p := η α (τ = 0) = 0. Ya que
se trata de una ecuación lineal, se propone el siguiente Ansatz
dη β η (τ ) = A β (τ )
.
dτ τ =0
α
Se tiene entonces que
α
(2.5.3)
d2 Aµ ν
= −Rαβσ µ ξ α ξ σ Aβ ν ,
(2.5.4)
dτ 2
dAµ ν
= δνµ .
con las condiciones Aµ ν (τ = 0) = 0,
dτ
El punto q será un punto conjugado a p si y sólo si existen valores iniciales no
triviales para los cuales η a |q = 0. Esto implica que
Aµ ν |q
por lo que
dη β = 0,
dτ τ =0
Det(Aµ ν )|q = 0,
(2.5.5)
(2.5.6)
es una condición necesaria y suficiente para que q sea conjugado a p.
Observación Entre los puntos p y q, se tiene Det(Aµ ν ) 6= 0, y la inversa de Aµ ν existe.
Por otro lado, es posible relacionar Aµν con Bab , ya que
dη α
= ξ b ∇b η α = ξ b ∇b [eα c η c ] = ξ b∇b [eα c ]η c + eα c ξ b ∇b η c
dτ
= eα c ξ b ∇b η c = eα c η b ∇b ξ c = eα c η b B c b = B α b η b ,
(2.5.7)
y además
dAα b dη b dη α
=
,
dτ
dτ dτ τ =0
(2.5.8)
2.5 Puntos conjugados
39
por lo que se deduce que
c
dAa b dη b a b
a
b dη = B bη = B bA c
dτ dτ τ =0
dτ τ =0
⇒
dA
= BA
dτ
⇒
B=
Con este resultado se obtiene la expresión
1
d
d
dA −1
=
A
Det(A) =
ln |Det(A)|.
θ = Tr(B) = Tr
dτ
Det(A) dτ
dτ
dA −1
A .
dτ
(2.5.9)
(2.5.10)
d
Det(A) no puede tomar un valor infinito
dτ
en γ. Por lo tanto, si θ → −∞ en el punto q, se tiene que Det(A) → 0 en q. De
modo inverso, si Det(A) → 0 en q, entonces θ → −∞. En consecuencia, una condición
necesaria y suficiente para que q sea un punto conjugado a p, es que para la congruencia
de geodésicas de tipo tiempo que emanan de p se tenga θ → −∞ en q.
La congruencia de geodésicas de tipo tiempo que pasan por p es ortogonal a hipersuperficies (tipo espacio). Además, en el interior de una variedad normal convexa de
p, las geodésicas en la congruencia son ortogonales a las superficies de tiempo propio
τ = const., a lo largo de las geodésicas. Por otro lado, de la ecuación obtenida para
ξ c ∇c ωab , se tiene que ωab se anula en todo tiempo τ , si se anula en un tiempo τ0 . Se
tiene entonces
Ya que Aa b satisface (2.5.4), se tiene que
Proposición 2.5.1 Sea (M, gab ) un espacio-tiempo satisfaciendo la condición débil de
energı́a. Sea γ una geodésica tipo tiempo y sea p ∈ γ. Asúmase que la convergencia
de la congruencia de geodésicas de tipo tiempo dirigidas al futuro desde p alcanza un
valor negativo θ0 en un punto r ∈ γ. Entonces en un tiempo propio τ ≤ 3|θ0 |−1 , desde
r a lo largo de γ, existe un punto q conjugado a p, asumiendo que γ llega a cubrir esa
distancia.
Observación La existencia de puntos conjugados en una geodésica de tipo tiempo
completa γ puede demostrarse bajo hipótesis más débiles. Si Rab ξ a ξ b ≥ 0 a lo largo
de la geodésica, y si Rab ξ a ξ b > 0 en un punto r ∈ γ, entonces para p suficientemente
alejado de r, la expansión de la congruencia de geodésicas tipo tiempo con origen en p
debe tomar un valor negativo en r. Por lo tanto p tendrá un punto conjugado q ∈ γ.
Sin embargo, aún si Rab ξ a ξ b = 0 a lo largo de γ, si los términos de curvatura en
el lado derecho de la ecuación para ξ c ∇c σab son no nulos en r ∈ γ, entonces σab no se
anula en una vecindad de r. Ya que la contribución −σab σ ab aparece en el lado derecho
de la ecuación de Raychaudhuri, un argumento similar establece la existencia de puntos
conjugados. Por lo tanto, todo lo que se requiere para la existencia de puntos conjugados
en la geodésica γ es que Rab ξ a ξ b ≥ 0 a lo largo de γ y Rabcd ξ b ξ d 6= 0 en al menos un
punto de γ.
Definición 2.5.3 Un espacio-tiempo satisface la condición genérica de tipo tiempo, si
cada geodésica de tipo temporal posee al menos un punto en el cual Rabcd ξ b ξ d 6= 0.
40
Singularidades
Proposición 2.5.2 Sea (M, gab ) un espacio-tiempo que satisface la condición genérica
de tipo tiempo y Asúmase que Rab ξ a ξ b = 0 para todo ξ a tipo tiempo. Entonces toda
geodésica completa tipo tiempo posee un par de puntos conjugados.
2.6.
Longitud extrema de geodésicas tipo tiempo
Sean p, q ∈ M y sea λα (t) una familia C ∞ uniparámetrica de curvas C ∞ tipo tiempo,
dirigidas de p a q, donde el parámetro t es tal que para todo α se tiene λα (t0 ) = p, y
∂ a
λα (t1 ) = q. Definanse el vector tangente T a := ∂t
y el vector de desviación X a :=
a
∂
. Entonces X a se anula en p y q, y además £T X a = 0.
∂α
λ0 (t)
q
λα (t)
p
La longitud de una de estas curvas esta dada por
τ (α) :=
Z
t1
f (α, t)dt =
t0
Z
t1
t0
p
−T a Ta dt.
(2.6.1)
La condición necesaria y suficiente para que una curva γ sea un punto crı́tico de τ para
todas las familias C ∞ λα con λ0 = γ es que γ sea una geodésica. Se tiene ası́
t1
t1
t1
T b X a ∇a Tb
dt
f (α, t)
t0
t0
t0
b Z t1
Z t1
X Tb
Tb
a
a b
T ∇a
= −
T X ∇a
dt +
dt
f
f
t0
t0
Z t1
Tb
a b
=
T X ∇a
dt.
f
t0
dτ
=
dα
Z
∂f
dt =
∂α
Por lo tanto, para α = 0,
dτ
dα
Z
a
X ∇a
p
−T b Tb dt
=−
Z
(2.6.2)
se anula para todo X a si y sólo si
a
T ∇a
Tb
f
= 0.
(2.6.3)
2.6 Longitud extrema de geodésicas tipo tiempo
41
Esta es la ecuación geodésica escrita con una normalización arbitraria para la función
f (α, t). Por otra parte, la segunda variación esta dada por
d2 τ
=
dα2
t1
Tb
∂
a b
T X ∇a
f
t0 ∂α
Z t1
Z t1
Tb
Tb
c
b
a
b
c
a
dt +
X (X ∇c T )∇a
dt
=
(X ∇c X )T ∇a
f
f
t0
t0
Z t1
Tb
b a c
+
X T X ∇c ∇ a
dt.
(2.6.4)
f
t0
Z
En consecuencia
Z t1
Z t1
Tb
Tb
d2 τ b a c
b
c
a
dt +
X T X ∇ c ∇a
dt
=
X (X ∇c T )∇a
2
dα α=0
f
f
t0
t0
Z t1
Z t1
Tb
Tb
b
c
a
b a c
X (T ∇c X )∇a
=
X T X ∇a ∇c
dt +
dt
f
f
t0
t0
Z t1
1
+
Rabcd X a T b X c T d dt
t0 f
Z t1
Z t1
Tb
1
b c
a
X T ∇ c X ∇a
dt +
=
Rcabd X c T a X b T d dt. (2.6.5)
f
f
t0
t0
Las expresiones en el lado derecho deben entenderse como siendo evaluadas en α = 0.
Ya que
1
1
X ∇a f = − Tb X a ∇a T b = − Tb T a ∇a X b = −T a ∇a
f
f
a
1
Tb X b
f
b
a
+ X T ∇a
Tb
,
f
(2.6.6)
se tiene que
X ∇a f a
α=0
y en consecuencia
a
= −T ∇a
1
b Tb X ,
α=0
f
(2.6.7)
1
c
Tc X .
X ∇a
f
α=0
(2.6.8)
Escogase ahora la parametrización de la curva de tal modo que f = 1 a lo largo de γ,
a
Tb
f
1
1
1
1
= X a ∇a Tb − 2 X a Tb ∇a f = T a ∇a Xb + 2 Tb T a ∇a
f
f
f
f
42
Singularidades
y tómese X a ortogonal a T a . Entonces
Z t1
Z t1
d2 τ b c
a
Rcabd X c T a X b T d dt
X T ∇c (X ∇a Tb )dt +
=
dα2 α=0
t0
t0
Z t1
Z t1
Rcabd X c T a X b T d dt
X b T c ∇c (T a ∇a Xb )dt +
=
t0
t0
=
Z
t1
X b (OX)b dt,
(2.6.9)
t0
donde
(OX)b := T c ∇c (T a ∇a Xb ) + Rcabd T a X c T d ,
(2.6.10)
es el operador de desviación geodésica.
Teorema 2.6.1 Sea γ una curva tipo tiempo C ∞ conectando dos puntos p, q ∈ M.
Entonces la condición necesaria y suficiente para que γ maximice localmente el tiempo
propio entre p y q sobre variaciones uniparámetricas suaves, es que γ sea una geodésica
sin ningún punto conjugado a p entre p y q.
Demostración Si γ no es una geodésica, entonces es posible construir una familia
uniparámetrica de curvas λα con
Z t1
dτ Tb
b a
X T ∇a
=
> 0.
(2.6.11)
dα α=0
f
t0
Si γ es una geodésica pero tiene un punto conjugado r entre p y q, entonces es posible
encontrar un vector de desviación X0a tal que (OX0 )a = 0, con X0a anulándose en p y
r. Usando la ecuación
Z t1
d2 τ X b (OX)b dt,
(2.6.12)
=
dα2 α=0
t0
se tiene que la variación X a = X0a entre p y r, seguida por X a = 0, no produce ningún
cambio en τ a segundo orden.
q
γ′
r
γ
X0a
p
2.6 Longitud extrema de geodésicas tipo tiempo
43
Al “suavizar” el vértice en r para esta variación, se obtiene una curva γ ′ , la cual
d2 τ
produce una desviación tal que
> 0 en α = 0. En consecuencia se tiene que
dα2
τ |γ ′ >> τ |γ , lo cual es una contradicción ya que γ es una geodésica.
Inversamente, si γ es una geodésica sin puntos singulares entre
y q, entonces la
P p −1
µ
µ
matriz A ν es no singular entre estos puntos y definiendo Y := (A )µ ν X ν se tiene
d2 τ
es negativa definida en α = 0.
que
dα2
Observación Una noción similar a la de puntos conjugados a lo largo de una curva
tipo tiempo se puede definir para un punto y una hipersuperficie Σ tipo espacio (C ∞ o
al menos C 2 ).
Definición 2.6.1 Sea ξ a el campo tangente unitario de la congruencia de geodésicas
tipo tiempo ortogonales a Σ. La curvatura extrı́nseca de Σ se define como
Kab := ∇a ξb|Σ = Bba |Σ .
(2.6.13)
Observación Kab es una curvatura puramente espacial, i.e., Kab ξ a = Kab ξ b = 0.
Ya que la congruencia es ortogonal a hiper-superficies se tiene ωab = 0, lo que implica
que Kab es simétrica. Se tiene ası́
1
1
1
Kab = £ξ gab = £ξ (hab − ξa ξb ) = £ξ hab ,
2
2
2
(2.6.14)
ya que £ξ ξ a = [ξ, ξ]a = 0.
hab es la métrica espacial inducida en las hiper-superficies de tiempo propio constante
desde Σ a lo largo de la congruencia de geodésicas perpendiculares a Σ. Es claro que
Kab mide el cambio de hab a lo largo de la congruencia. En términos de coordenadas
Gaussianas normales se tiene que
Kµν =
1 ∂hµν
.
2 ∂t
(2.6.15)
Además,
K := K a a = hab Kab = θ.
(2.6.16)
Definición 2.6.2 Un punto p en una congruencia de geodésicas perpendiculares a Σ
se dice que es conjugado a Σ a lo largo de γ si existe un vector de desviación ortogonal
η a de la congruencia, el cual es distinto de cero en Σ pero se anula en p.
Observación p es conjugado a la hipersuperficie Σ si dos geodésicas “infinitesimalmente cercanas” perpendiculares a Σ se cruzan en p. p será conjugado a Σ si y sólo si
θ → −∞ en p.
44
Singularidades
γ
p
ηa
Σ
Proposición 2.6.2 Sea (M, gab ) un espacio-tiempo tal que Rab ξ a ξ b ≥ 0 para todo ξ a
tipo tiempo. Sea Σ una hiper-superficie espacial con K = θ < 0 en un punto q ∈ σ.
Entonces en un tiempo propio τ ≤ 3|K|−1, existe un punto p conjugado a Σ a lo largo
de la geodésica γ perpendicular a Σ y pasando a través de q, suponiendo que γ llega a
extenderse hasta ese punto.
Teorema 2.6.3 Sea γ una curva tipo tiempo C ∞ conectando un punto p ∈ M a un
punto q en una hiper-superficie Σ tipo espacio C ∞ . Entonces la condición necesaria y
suficiente para que γ maximice localmente el tiempo propio entre p y Σ sobre variaciones
uniparámetricas C ∞ , es que γ sea una geodésica perpendicular a Σ sin ningún punto
conjugado a Σ, entre p y Σ.
2.7.
Puntos conjugados de geodésicas nulas
De la ecuación de desviación geodésica
T a ∇a (T b ∇b η c ) = −Rabd c T a η b T d ,
(2.7.1)
se tiene que para todo campo de Jacobi η a en una geodésica nula µ con vector tangente
k a se cumple
k c ∇c [k b ∇b (k a ηa )] = k c ∇c (k a k b ∇b ηa ) = k a k c ∇c (k b ∇b ηa ) = −Rabcd k a η b k c k d = 0.
(2.7.2)
a
Esto implica que η no puede anularse en dos puntos distintos p, q ∈ µ, a menos que
k a ηa = 0 a lo largo de µ. Además, si η a es un campo de Jacobi, entonces también
η a + αk a lo es, con α una constante. En consecuencia, p y q son puntos conjugados si y
sólo si existe un campo de Jacobi, el cual es distinto de cero únicamente por un múltiplo
de k a en p y q. Por lo tanto, a lo largo de una geodésica nula µ, los puntos p, q ∈ µ serán
conjugados si y sólo si un vector η̂ a ∈ V̂ satisface la ecuación de desviación geodésica y
se anula en p y q.
Todos los vectores η̂ a de este tipo, que se anulan en p, se obtienen como vectores
de desviación de cualquier congruencia de geodésicas nulas conteniendo a la familia
bidimensional de geodésicas nulas originándose desde p. Por lo tanto, q será conjugado
a p si y sólo si la expansión θ de la congruencia de geodésicas nulas tiene a −∞ en q.
2.7 Puntos conjugados de geodésicas nulas
45
Proposición 2.7.1 Sea (M, gab ) un espacio-tiempo tal que Rab k a k b ≥ 0 para todo k a
tipo nulo. Sea µ una geodésica nula y sea p ∈ µ. Asúmase que θ toma un valor negativo
θ0 en r ∈ µ. Entonces en un tiempo propio λ ≤ 2|θ0 |−1 desde r, existe un punto q
conjugado a p a lo largo de µ, asumiendo que µ llega a extenderse hasta ese punto.
Observación Si Rab k a k b ≥ 0 a lo largo de una geodésica nula completa µ, y si existe
un punto r ∈ µ tal que Rab k a k b > 0 ó k[e Ca]bc[dkf ] k b k c 6= 0, entonces µ posee un par de
puntos conjugados.
Definición 2.7.1 Un espacio-tiempo (M, gab ) satisface la condición genérica nula si
toda geodésica nula posee al menos un punto donde Rab k a k b 6= 0 ó k[e Ca]bc[dkf ] k b k c 6= 0,
i.e., al menos un punto donde k[e Ra]bc[d kf ] k b k c 6= 0.
Proposición 2.7.2 Asúmase que (M, gab ) satisface la condición genérica nula y además
Rab k a k b ≥ 0 para todo k a nulo. Entonces toda geodésica nula completa posee un par de
puntos conjugados.
Teorema 2.7.3 Sea µ una curva causal C ∞ y sean p, q ∈ µ, entonces no existe una
familia uniparámetrica de curvas causales λα conectando p y q con λ0 = µ, y λα tipo
tiempo para todo α > 0, si y sólo si µ es una geodésica nula sin ningún punto conjugado
a p a lo largo de µ, entre p y q.
Observación La relación de conjugación entre un punto y una hiper-superficie espacial
bidimensional S es posible. En cada punto q ∈ S, existen dos vectores nulos k1a , k2a
dirigidos al futuro y perpendiculares a S. Si S es orientable se puede realizar una
elección continua de k1a , k2a sobre S. Por lo tanto dos familias de geodésicas nulas pueden
ser definidas: geodésicas nulas entrantes y geodésicas nulas salientes.
Estas son congruencias generando únicamente una hipersuperficie nula, no una región abierta del espacio-tiempo. La expansión, torsión y distorsión son cantidades bien
definidas ya que los vectores de desviación ortogonal a las geodésicas de tangente k a
están incluidos en la congruencia.
Definición 2.7.2 Sea µ una geodésica nula en una de estas congruencias. Un punto
p ∈ µ se dice que es conjugado a S a lo largo de µ, si existe un vector de desviación η̂ a
de la congruencia, el cual no se anula en S pero si se anula en p.
Observación Resultados similares a la Proposición 2.6.2 y al Teorema 2.6.3 son válidos
con las modificaciones correspondientes, i.e., tipo tiempo → causal.
Teorema 2.7.4 Sea (M, gab ) un espacio-tiempo globalmente hiperbólico y sea K una
subvariedad tipo espacio bidimensional, orientable y compacta, entonces todo punto p ∈
∂I + (K) se encuentra en una geodésica nula dirigida al futuro que inicia en K, la cual
es ortogonal a K y no tiene punto conjugado a K entre p y K.
46
Singularidades
Demostración Tomando en cuenta que I + (S) ⊂ J + (S) ⊂ I + (S), implica J + (K) =
I + (S) si K es compacto en un espacio-tiempo globalmente hiperbólico, entonces ∂I + (K) ⊂
J + (K), por lo que todo p ∈ ∂I + (K) puede unirse a K por medio de una geodésica nula dirigida al pasado y contenida en ∂I + (K). Ahora bien, si esta geodésica nula no
fuese ortogonal a K, o tuviese un punto conjugado, entonces, usando el Teorema 2.6.3
modificado para curvas causales, se tendrı́a que p ∈ I + (K) y por lo tanto p ∈ ∂I + (K).
Curva tipo tiempo
p
Punto conjugado
K
2.8.
Existencia de curvas de longitud máxima
La longitud τ de una curva
suave (o incluso C 1 ) causal λ, entre dos puntos p, q ∈ M,
a
∂
con vector tangente T a =
, esta dada por
∂t
Z p
−T a Ta dt.
(2.8.1)
τ [λ] =
Esta noción de longitud puede generalizarse al conjunto C(p, q) de curvas causales
continuas dirigidas al futuro, de p a q. Sea
C̃(p, q) := {γ ∈ C(p, q)| γ es tipo tiempo y suave }.
(2.8.2)
Este conjunto es denso en C(p, q), excepto para ciertas geodésicas nulas, i.e., toda curva
causal continua puede expresarse como el lı́mite, en una cierta topologı́a T [C(p, q)], de
una secuencia de curvas tipo tiempo suaves.
Observación Si τ fuera continua en C̃(p, q), se podrı́a extender esta curva a C(p, q)
por medio de
τ [µ] := lı́m τ [λn ],
(2.8.3)
n→∞
donde {λn } ∈ C̃(p, q) tiende a µ ∈ C(p, q). Sin embargo, τ no es continua en C̃(p, q)
ya que para una curva tipo tiempo suave existe una curva tipo tiempo en zig-zag
arbitrariamente cercana, cuya longitud es arbitrariamente cercana a cero.
2.8 Existencia de curvas de longitud máxima
47
q
µ
µ′
p
Aún ası́, τ es semi-continua por arriba en C̃(p, q), i.e., para cada λ ∈ C̃(p, q), dado
ǫ > 0, existe un abierto O ∈ C̃(p, q) de λ tal que si λ′ ∈ O, entonces τ [λ′ ] ≤ τ [λ] + ǫ.
Es posible extender τ a C(p, q) como una función semi-continua por arriba, ya que
para λ ∈ C(p, q) y una vecindad O ∈ C(p, q) de λ se pueden definir
T [O] := sup {τ [λ′ ]| λ′ ∈ O, λ′ ∈ C̃(p, q)},
(2.8.4)
τ [λ] := inf {T [O]| O una vecindad abierta de λ}.
(2.8.5)
y
Proposición 2.8.1 Sea (M, gab ) un espacio-tiempo fuertemente causal, y sean p, q ∈
M con q ∈ I + (p). Entonces τ es semi-continua por arriba en C̃(p, q).
Demostración Sea λ ∈ C̃(p, q), con λ parametrizada por el tiempo propio y con vector
tangente ua . En el interior de una vecindad normal de cada punto r ∈ λ, las geodésicas
tipo espacio ortogonales a ua forman una base de una hiper-superficie tipo espacio de
dimensión 3. En el interior de una vecindad suficientemente pequeña U ∈ M de λ, estas
hiper-superficies generan una foliación de U, i.e., una única hiper-superficie pasará a
través de cada punto de U.
En p ∈ U se define F (p) como el valor del tiempo propio de λ en el punto de
intersección de λ con la hipersuperficie en la cual se encuentra p. Esto define una
función F sobre U, de modo tal que ∇a F es un vector tipo tiempo en U y además sobre
λ se tiene ua = ∇a F , por lo que (∇a F )(∇a F ) = 1 en λ.
Sea λ′ ∈ C̃(p, q) con λ′ ∈ U. Se escoge el valor de la función F como parámetro de
la curva λ′ , y el vector tangente asociado se denota como v a . Entonces
v a ∇a F = 1.
(2.8.6)
Descomponiendo a v a de acuerdo a
v a = α∇a F + na ,
na ∇a F = 0,
(2.8.7)
se obtiene que α(∇a F )(∇a F ) = 1, y en consecuencia
va =
∇a F
+ na .
(∇b F )(∇b F )
(2.8.8)
48
Singularidades
λ
ua
F (p′) := λ(τ ′ )
p′
p
F (p) := λ(τ )
Por lo tanto
v a va =
1
+ na na
b
(∇ F )(∇b F )
⇒
√
1
.
v a va ≤ p
b
(∇ F )(∇bF )
(2.8.9)
Ya que ∇a F es una aplicación continua, dado ǫ > 0, se puede escoger una vecindad
U ′ ⊂ U de λ tal que
1
ǫ
p
,
(2.8.10)
≤1+
b
τ [λ]
(∇ F )(∇b F )
en U ′ . Entonces para todo λ′ ∈ C̃(p, q) contenido en la vecindad O ′ ∈ C̃(p, q) definida
por U ′ , se tiene que
Z
Z √ a
ǫ
′
τ [λ ] ≤
dF = τ [λ] + ǫ.
(2.8.11)
v va dF ≤
1+
τ [λ]
En consecuencia τ es una función semi-continua por arriba.
a
a
a
Observación u = ∇ F implica que u F ua F = 1, por lo que τ [λ] =
Z
dF .
Z
√
ua ua dF =
Observación En general se puede considerar el conjunto C(Σ, p) de curvas causales
continuas dirigidas al futuro de la superficie Σ al punto p, la cual puede se tomada
como una superficie de Cauchy en un espacio globalmente hiperbólico. Sin embargo,
es posible definir este conjunto aún si Σ es cualquier conjunto acronal en un espaciotiempo causalmente fuerte. Los argumentos anteriores muestran entonces que τ es una
función semi-continua por arriba en C̃(Σ, p), el espacio de curvas tipo tiempo suaves
de Σ a p. Por lo tanto, es posible extender τ a una función semi-continua por arriba
definida en todo C(Σ, p).
Observación La condición necesaria y suficiente para que una curva suave γ maximice
localmente la longitud entre 2 puntos (o un punto y una hiper-superficie) es que γ sea
2.8 Existencia de curvas de longitud máxima
49
una geodésica sin puntos conjugados. Con la extensión de τ a curvas continuas, existe la
posibilidad de que una curva continua no suave entre 2 puntos (o un punto y una hipersuperficie), pueda tener una longitud igual o mayor que la de cualquier geodésica. Esta
posibilidad puede desecharse usando el siguiente argumento: es posible mostrar que en
cualquier vecindad normal U, la única geodésica γ conectando 2 puntos causalmente
relacionados r, s ∈ U, tiene una longitud estrictamente mayor que la de cualquier otra
curva causal suave por partes conectando esos puntos.
En consecuencia por semi-continuidad por arriba, cualquier curva causal continua
µ, conectando r, s ∈ U, debe satisfacer τ [µ] ≤ τ [γ]. Sin embargo, si la igualdad fuera
satisfecha con µ 6= γ, considérese q tal que q ∈ µ pero q ∈
/ γ. Sean γ1 , γ2 , los segmentos
de geodésicas conectando r con q y q con s respectivamente. Ya que γ1 maximiza
la longitud entre r y q, mientras γ2 maximiza la longitud entre q y s, se tiene que
τ [γ1 ] + τ [γ2 ] ≥ τ [µ] = τ [γ], lo cual contradice la hipótesis de que γ tiene una longitud
mayor que cualquier otra curva suave por partes entre r y s.
U
q
s
µ
γ
r
γ2
γ1
Por lo tanto, en el interior de cualquier vecindad normal convexa, la única geodésica
conectando cualquier par de puntos de manera causal, tiene longitud mayor que la
de cualquier curva causal continua conectando los puntos. Por lo tanto, una curva
causal continua arbitraria conectando 2 puntos no puede ser una curva de longitud
máxima entre esos puntos a menos que sea una geodésica, ya que si no se tratase de
una geodésica, entonces se podrı́a deformar la curva causal en una vecindad normal
convexa para obtener una curva de longitud mayor.
Se tienen ası́ los siguientes resultados:
Teorema 2.8.2 Sea (M, gab ) un espacio-tiempo fuertemente causal. Sean p, q ∈ M
con q ∈ J + (p), y sea τ la función longitud definida en C(p, q). Entonces, una condición
necesaria para que τ tome su valor máximo en γ ∈ C(p, q) es que γ sea una geodésica
sin puntos conjugados a p, entre p y q.
Teorema 2.8.3 Sea (M, gab ) un espacio-tiempo fuertemente causal. Sean p ∈ M, y sea
Σ una hipersuperficie tipo espacio suave acronal, y sea τ la función longitud definida
en C(Σ, p). Entonces, una condición necesaria para que τ tome su valor máximo en
γ ∈ C(p, q) es que γ sea una geodésica ortogonal a Σ sin puntos conjugados a Σ, entre
Σ y p.
50
Singularidades
Teorema 2.8.4 Sea (M, gab ) un espacio-tiempo globalmente hiperbólico. Sean p, q ∈ M
con q ∈ J + (p), entonces existe una curva γ ∈ C(p, q) para la cual τ toma su valor
máximo en C(p, q).
Demostración C(p, q) es un conjunto compacto por lo que τ es semi-continua por
arriba. Por lo tanto, usando una generalización del hecho de que una función continua
en un espacio topológico K compacto, definida sobre R, es acotada y toma sus valor
máximos y mı́nimos en K, se deduce que τ es acotada y toma su valor máximo en
C(p, q).
Teorema 2.8.5 Sea (M, gab ) un espacio-tiempo globalmente hiperbólico. Sea p ∈ M, y
sea Σ una superficie de Cauchy, entonces existe una curva γ ∈ C(Σ, p) para la cual τ
toma su valor máximo en C(Σ, p).
Demostración C(Σ, p) es un espacio compacto y τ es una función semi-continua por
arriba.
2.9.
Teoremas sobre singularidades
Teorema 2.9.1 Sea (M, gab ) un espacio-tiempo globalmente hiperbólico con Rab ξ a ξ b ≥
0 para todo ξ a tipo tiempo, lo cual sucederá si las ecuaciones de Einstein se cumplen
junto con la condición fuerte de energı́a. Asúmase que existe una superficie Σ de Cauchy
tipo espacio, suave (o C 2 al menos), para la cual la traza de la curvatura extrı́nseca (para
la congruencia geodésica normal dirigida al pasado) satisface K ≤ C ≤ 0 en todo punto,
con C una constante. Entonces ninguna curva tipo tiempo dirigida al pasado desde Σ
puede tener una longitud > 3|C|−1. Se tiene en particular que todas las geodésicas tipo
tiempo dirigidas al pasado son incompletas.
Demostración Supóngase que existe una curva λ tipo tiempo dirigida al pasado desde
Σ con longitud mayor a 3|C|−1. Sea p ∈ λ un punto más allá de una longitud 3|C|−1
desde Σ. Usando el Teorema 2.8.5, se tiene que existe una curva γ de longitud máxima
desde p a Σ, la cual debe tener también una longitud mayor a 3|C|−1 . De acuerdo al
Teorema 2.8.3, esto implica que γ debe ser una geodésica sin ningún punto conjugado
entre Σ y p.
Esto contradice el resultado establecido en la Proposición 2.6.2, el cual afirma que
γ debe tener un punto conjugado entre Σ y p. Por lo tanto, la curva λ no existe.
Teorema 2.9.2 Sea (M, gab ) un espacio-tiempo fuertemente causal con Rab ξ a ξ b ≥ 0
para todo ξ a tipo tiempo. Supóngase que existe una hiper-superficie S tipo espacio, suave,
acronal, sin bordes, compacta, tal que para la congruencia geodésica normal dirigida al
pasado desde S se tiene K < 0 en todo punto en S. Sea C el máximo valor de K,
de modo que K ≤ C < 0, en todo punto de S. Entonces, al menos una geodésica tipo
tiempo dirigida al pasado sin fin desde S tiene longitud no mayor a 3|C|−1.
2.9 Teoremas sobre singularidades
51
Σ
γ geodésica
3
τ [γ] > |C|
λ
tipo tiempo
p
Demostración Asúmase que todas las geodésica son de tipo tiempo sin fin dirigidas al
pasado. Ya que la variedad (Int[D(S)], gab ) satisface las hipótesis del teorema anterior,
todas las geodésicas tipo tiempo sin fin dirigidas al pasado desde S debe abandonar
Int[D(S)].
Por otra parte, ya que H(S) es la frontera de D(S), todas las geodésicas deben
intersectar H − (S) antes de que su longitud tome un valor mayor a 3|C|−1 . En particular
esto implica que H − (S) 6= {∅}.
Σ
Int[D − (S)]
H − (S)
geodésica tipo tiempo sin fin pasada
Se desea mostrar que H − (S) es un conjunto compacto. Para ver esto, nótese que
para cada p ∈ H − (S) existe una geodésica ortogonal a S y de longitud máxima desde
S a p. Por otra parte, la longitud de cualquier curva causal desde S a p ∈ H − (S) se
encuentra acotada por arriba, ya que su longitud es estrictamente menor que 3|C|−1 , de
modo que el supremo, τ0 , de la longitud de todas la curvas causales desde S a p existe
y es no trivial.
Sea ahora {λn } una secuencia de curvas tipo tiempo desde S a p tal que
lı́m τ [λn ] = τ0 .
n→∞
(2.9.1)
Tómese qn ∈ λn , con qn 6= p, de modo tal que la secuencia {qn } converga a p. Ya que
qn ∈ I + (p), esto implica que qn ∈ Int[D − (S)]. Usando el resultado enunciado en el
Teorema 2.8.5, se tiene que existe una geodésica ortogonal γn a S partiendo desde S
a qn , la cual maximiza la longitud de todas las curvas causales desde S a qn . Es claro
además que
lı́m τ [γn ] = τ0 .
(2.9.2)
n→∞
52
Singularidades
rn
λn
Σ
γn
qn
p
H − (S)
Denótese por rn el punto de intersección de γn con S. Ya que por hipótesis S es
compacto, existe un punto de acumulación r de la secuencia {rn }. Sea γ := lı́mn→∞ γn ,
la geodésica ortogonal a S con origen en el punto r. Debido a la dependencia continua
de las geodésicas en su punto inicial y vector tangente, se deduce que γ debe intersectar
a H − (S) en p, y además
τ [γ] = lı́m τ [γn ] = τ0 .
n→∞
(2.9.3)
En consecuencia, γ es la geodésica tipo tiempo ortogonal a S, la cual maximiza la
longitud desde S a p.
Para mostrar la compacidad de H − (S), basta con probar que toda secuencia {pn } de
puntos en H − (S) posee un punto de acumulación p ∈ H − (S). Sea {γ̃n } una secuencia
de geodésicas ortogonales a S de longitud máxima desde S a pn , y sea r̃n el punto de
intersección de γ̃n con S. Esto define una secuencia con punto de acumulación r̃ ∈ S.
Sea γ̃ la geodésica ortogonal a S originándose desde r̃ , y sea p el punto de intersección
de γ̃ con H − (S). Entonces p es un punto de acumulación de la secuencia {pn }. Esto
muestra que H − (S) es un conjunto compacto.
r̃
γ̃
r̃n
Σ
γ̃n
p
pn
H − (S)
Ya que Borde(S) = {∅}, se tiene que de acuerdo al Teorema 1.3.5, H − (S) debe contener una geodésica nula sin fin dirigida al futuro. Sin embargo, esto es una contradicción
ya que (M, gab ) es fuertemente causal y por el Lema 1.2.1, debido a la compacidad de
H − (S), toda curva causal debe tener puntos finales y pasados en H − (S). Por lo tanto
la hipótesis de que todas las geodésica tipo tiempo sin fin dirigidas al pasado poseen
una longitud mayor que 3|C|−1 es falsa.
2.9 Teoremas sobre singularidades
2.9.1.
53
La no completez de las geodésicas nulas
Definición 2.9.1 Una subvariedad T de tipo espacial C ∞ , bidimensional, compacta,
teniendo la propiedad de que la expansión θ de las geodésicas nulas (entrantes y
salientes) dirigidas al futuro y ortogonales a T sea negativa en todo punto, se denomina
una superficie atrapada.
Teorema 2.9.3 Sea (M, gab ) un espacio-tiempo conexo, globalmente hiperbólico con
una superficie de Cauchy no compacta. Asúmase que Rab k a k b ≥ 0, para todo vector
k a nulo. Supóngase además que M contiene una superficie atrapada T . Denótese por
θ0 < 0, el valor máximo de la expansión θ para las geodésicas entrantes y salientes
ortogonales a T . Entonces, al menos una geodésica nula ortogonal dirigida al futuro sin
fin desde T posee una longitud no mayor que 2|θ0 |−1 .
Demostración Asúmase que todas las geodésicas nulas dirigidas al futuro desde T
tienen longitud mayor a 2|θ0 |−1 . Entonces, sea f+ : T × [0, 2|θ0 |−1 ] → M, definida por
medio de
f+ (q, a) := {q̃ ∈ M|γ(0) = q, γ(a) = q̃, γ ortogonal a T, γ una geodésica nula saliente}.
(2.9.4)
Del mismo modo se define una función f− para geodésicas nulas entrantes
f− (q, a) := {q̃ ∈ M|γ(0) = q, γ(a) = q̃, γ ortogonal a T, γ una geodésica nula entrante}.
(2.9.5)
Ya que el conjunto : T × [0, 2|θ0 |−1 ] es compacto, y f+ , f− son funciones continuas,
las imágenes de f+ , f− , y de su unión A = f+ ∪ f− , deben ser también conjuntos
compactos. De acuerdo a la Proposición 2.6.2 aplicada al caso de geodésicas nulas, y
al Teorema 2.7.4, se tiene que ∂I + (T ) ⊂ A, y ya que ∂I + (T ) es cerrado se tiene que
∂I + (T ) es un conjunto compacto.
f− {T × [0, 2|θ0 |−1 ]}
T
p
p′
q
q′
Se desea mostrar que la compacidad de ∂I + (T ) contradice la existencia de una
superficie de Cauchy Σ no compacta. Usando el hecho de que el espacio-tiempo es
orientable, es posible escoger un campo vectorial ta tipo tiempo C ∞ en M. Ya que
∂I + (T ) es un conjunto acronal, cada curva integral de ta puede intersectar ∂I + (T ) a lo
más una vez, mientras que toda curva integral intersecta a Σ una única vez. Defı́nase
ası́ el mapeo ψ : ∂I + (T ) → Σ, obtenido al seguir las curvas integrales de ta desde
∂I + (T ) a Σ.
54
Singularidades
Sea S ⊂ Σ, el conjunto imagen ψ[∂I + (T )] equipado con la topologı́a inducida por
Σ. Entonces ψ : ∂I + (T ) → Σ, define un homeomorfismo por ser ψ una función continua
y biyectiva con inversa continua. Ya que ∂I + (T ) es compacto, se tiene que S también
lo es, y visto como un subconjunto de Σ, S es cerrado.
S
Σ
curvas integrales de ta
∂I + (T )
T
Por otro lado, ya que ∂I + (T ) es una variedad tridimensional continua, cada punto
de ∂I + (T ) tiene una vecindad homeomorfica a una bola abierta en R3 . Ya que ψ es un
homeomorfismo, esto también se cumple para el conjunto S, el cual como subconjunto
de Σ, debe ser un conjunto abierto.
Sin embargo, ya que se asume que M es conexo, se tiene que Σ también es conexo.
Por lo tanto, se concluye que S = Σ, debido a que ∂I + (T ) 6= {∅}. Pero esto no es
posible, ya que S es compacto mientras que Σ no lo es.
En consecuencia, el hecho de que ∂I + (T ) sea compacto conduce a una contradicción.
Esta propiedad resultó de la hipótesis de que las geodésicas nulas dirigidas al futuro
desde T poseı́an una longitud mayor a 2|θ|−1, de modo que es claro entonces que dichas
geodésicas tienen una longitud menor a este valor, medida en tiempo afı́n.
Un resultado sobre la existencia de singularidades en un espacio-tiempo está dado
por el siguiente enunciado [16]:
Teorema 2.9.4 Sea (M, gab ) un espacio-tiempo que satisface las siguientes condiciones
1. Rab X a X b ≥ 0, para todo X a tipo tiempo o nulo,
2. las condiciones genéricas tipo tiempo y nulas son satisfechas,
3. no existen curvas cerradas tipo tiempo,
4. alguna de las siguientes propiedades se cumple:
(M, gab ) posee un conjunto acronal compacto sin borde,
(M, gab ) posee una superficie atrapada,
existe un punto p ∈ M, tal que el escalar de expansión θ de las geodésicas nulas dirigidas al futuro (o al pasado) originándose en p, toma valores negativos
a lo largo de cada geodésica en la congruencia,
2.9 Teoremas sobre singularidades
55
entonces, (M, gab ) contiene al menos una geodésica tipo tiempo o nula, la cual es incompleta.
Ejercicios
1. Para la métrica de Schwarzschild
ds2 = f (r)dt2 − f (r)−1 dr 2 − r 2 (dϑ2 + sin2 ϑdφ2 ),
f (r) := 1 −
2M
,
r
calcule el valor de la expansión θ en el caso de una congruencia de geodésicas
radiales tipo tiempo y discuta su comportamiento como función de r.
2. Sea la métrica de Robertson-Walker
dr 2
2
2
2
2
2
2
2
ds = dt − a (t)
+ r (dϑ + sin ϑdφ ) .
1 − kr 2
Calcule el valor de la expansión θ en el caso de una congruencia de
Geodésicas radiales tipo tiempo con k = 0,
Geodésicas radiales nulas con k 6= 0.
3. Considere la métrica
ds2 = z −3/2 (dt2 − dz 2 ) − (dx2 + dy 2),
z > 0,
la cual es conforme a la métrica simétrica plana en vacı́o de Taub [17, 18].
Muestre que la existencia de los vectores de Killing
las siguientes cantidades
E := z −3/2
dt
,
dλ
P1 :=
dx
,
dλ
∂ ∂ ∂
, ,
implica que
∂t ∂x ∂y
P2 :=
dy
dλ
son conservadas a lo largo de geodésicas con parámetro afı́n λ.
Pruebe que a lo largo de una geodésica nula se tiene
"
2 #
dz
z −3/2 −E 2 z 3 +
+ P 2 = 0,
P 2 := P12 + P22 .
dλ
Muestre que si Q := P 2 /E 2 = 0, entonces las geodésicas nulas alcanzan la
singularidad z = 0.
Muestre que si Q es distinto de cero, entonces las geodésicas nulas poseen
un punto de retorno pR , y encuentre el valor correspondiente de zR .
56
Singularidades
El determinar bajo que condiciones dos puntos en una geodésica nula dirigida al futuro con Q 6= 0 son conjugados, puede reducirse al problema de
determinar la condición bajo la cual una geodésica tipo tiempo en la variedad
Σtz con métrica
ds2tz = z −3/2 (dt2 − dz 2 ),
posee puntos conjugados (¿Porqué?). Considere ası́ dos puntos p0 = (t0 , z0 )
y p1 = (t1 , z1 ), con t0 < t1 , a lo largo de una geodésica γ tipo tiempo dirigida
al futuro. Denote por (a, b) las componentes de un vector v en p0 y considere
el mapeo exponencial expp0 : (a, b) → (t, z). Sea v1 = (a1 , b1 ) = exp−1
p0 (p1 ),
con v1 tangente a γ en p0 . El punto p1 será conjugado a p0 a lo largo de γ si
y sólo si [6]
∂t ∂t ∂a ∂b J(a1 , b1 ) = ∂z
= 0.
∂a ∂z
∂b
(a1 ,b1 )
∂ Eligase el parámetro afı́n λ de tal modo que v1 =
con λ = 0 en p0 , y
∂λ p0
sean (Qγ , E1 ) las cantidades conservadas a lo largo de γ, (Q, E) las cantidades
conservadas a lo largo de las geodésicas ρ(λ) tipo tiempo dirigidas al futuro
con ρ(0) = p0 , y t = t(λ), z = z(λ) las ecuaciones de ρ. Muestre que
3/2
a = Ez0 ,
3/2
a1 = E1 z0 ,
3/4
3/2
b = ±Ez0 (z0
3/4
− Q)1/2 ,
3/2
b1 = ±E1 z0 (z0
− Qγ )1/2 .
Considere el caso particular en que los puntos p0 y p1 están localizados en el
mismo lado del punto de retorno pR (t0 < t1 < tR ó tR < t0 < t1 ). Pruebe
que las relaciones siguientes son validas
Z z0
Z z0
−3/4 3/2
−1/2
−1
u
(u − Q)
du = 1, t − t0 =
u3/4 (u3/2 − Q)−1/2 du.
E
z
Mediante el resultado anterior calcule
∂t
K(Qγ , E1 ) := ∂Q
∂z
∂Q
z
∂t
∂E
∂z
∂E
.
(Qγ ,E1 )
Usando el hecho de que J(a1 , b1 ) = 2b
K(Qγ , E1 ), argumente si es posible que
a
p1 sea punto conjugado de p0 a lo largo de γ(λ).
Capı́tulo 3
Formulación de valores iniciales
3.1.
Descomposición ADM
Considérese un espacio-tiempo globalmente hiperbólico (M, gab ), entonces es posible
realizar una foliación por medio de una superficie de Cauchy Σt , donde el parámetro t
representa una función de tiempo global. Sea na el campo vectorial normal a la hipersuperficie Σt normalizado de acuerdo a na na = 1. La métrica gab induce entonces una
métrica tridimensional
hab := gab − na nb ,
(3.1.1)
la cual es tipo espacio en cada hipersuperficie de Cauchy Σt , i.e., hab nb = 0. Sea ta
un campo vectorial en M parametrizado de acuerdo a ta ∇a t = 1. Este campo vectorial
puede descomponerse en sus proyecciones ortogonales y tangenciales a la hipersuperficie
Σt como
ta = αna + N a ,
(3.1.2)
donde N a es un vector tipo espacio tangente a Σt . Se tiene entonces que ta na = αna na =
α, lo cual a su vez implica que
Na = ta − (tb nb )na = (gab − na nb )tb = hab tb .
(3.1.3)
Una expresión alternativa para α puede obtenerse de la condición
1 = ta ∇a t = αna ∇a t
⇒
α = (na ∇a t)−1 ,
(3.1.4)
donde se ha usado el hecho de que N a ∇a t = 0, ya que la variación ∇a t se efectúa a lo
largo del vector na .
Las curvas integrales asociadas al campo vectorial ta permiten identificar distintas
hipersuperficies Σt por medio de difeomorfismos. De este modo, el flujo del tiempo
asociado a ta puede ser visualizado como la variación de la métrica espacial hab en una
variedad tipo espacio tridimensional Σ. El problema de valores iniciales de un espacio
globalmente hiperbólico en relatividad general puede ser planteado entonces como el
estudio de la evolución de una métrica Riemanniana en una variedad tridimensional
58
Formulación de valores iniciales
Σt
ta
curva integral
Σ0
fija, donde la dinámica es dictada por la métrica hab definida anteriormente, los datos
∂hab
), a t = 0 por ejemplo.
iniciales siendo representados por la pareja (hab ,
∂t
∂hab
en una hipersuperficie Σ puede relacionarse con la curLa derivada temporal
∂t
vatura extrı́nseca Kab |Σ . Es fácil ver que la relación Kab = 12 £ξ hab , válida para un
vector tipo tiempo unitario ξ a asociado a una congruencia de geodésicas tipo tiempo
ortogonales a Σ, puede generalizarse a
1
Kab = ∇a ξb = hca ∇c ξb = hca ∇c nb = £n hab .
(3.1.5)
2
De manera más especifica, el problema de valores iniciales puede formularse como
la existencia de un espacio-tiempo globalmente hiperbólico (M, gab ) que satisfaga las
ecuaciones de Einstein, y el cual posea una superficie de Cauchy difeomorfica a Σ, en la
cual la métrica inducida este dada por hab , y la curvatura extrı́nseca sea precisamente
Kab . Esta solución, la cual debe ser única, deberá depender de manera continua de los
datos iniciales, satisfaciendo además la propiedad de dominio de dependencia, i.e, una
variación de los datos iniciales fuera de un subconjunto cerrado S de Σ, no debe afectar
la solución en D(S) (propagación causal).
Tómese un vector v a en un punto p ∈ Σ, entonces si la proyección de este vector
a lo largo de na se anula, puede decirse que v a esta contenido completamente en el
espacio tangente Vp |Σ , de modo que v a = ha b v b , donde ha b = δba − na nb es el operador de
proyección. De modo más general, un tensor T a1 ···ak b1 ···bl , definido en un punto p ∈ Σ,
es un vector definido en el espacio tangente Vp |Σ , si
T a1 ···ak b1 ···bl = ha1 c1 · · · hak ck hb1 d1 · · · hbl dl T c1 ···ck d1 ···dl ,
(3.1.6)
y de modo inverso, cualquier tensor en p ∈ Σ da origen a un tensor en Vp que satisface
la relación anterior.
Lema 3.1.1 Sea (M, gab ) un espacio-tiempo dado y sea Σ una hipersuperficie tipo espacio C ∞ en M. Sea hab la métrica inducida en la hipersuperficie Σ, y sea Da la derivada
covariante asociada, entonces Da puede expresarse como
Dc T a1 ···ak b1 ···bl = ha1 c1 · · · hak ck hb1 d1 · · · hbl dl hc f ∇f T c1 ···ck d1 ···dl ,
(3.1.7)
3.1 Descomposición ADM
59
donde ∇a es la derivada covariante asociada a la métrica gab .
Demostración Da satisface todas las propiedades de una derivada covariante y además
Da hbc = ha f hb r hc s ∇f (grs − nr ns ) = 0,
(3.1.8)
por lo que es el único operador de derivación compatible con hab .
3.1.1.
Ecuaciones de Gauss-Codacci
Las ecuaciones de Gauss-Codacci son fundamentales en el estudio de la incrustación
de un espacio de Riemann de dimensión n en un espacios sin curvatura de Riemann
de dimensión mayor N. Este problema no ha sido resuelto en toda su generalidad,
pero cuando la condición N ≤ n(n + 1)/2 se satisface, se tiene que las ecuaciones
garantizando la existencia de la incrustación deben poseer una solución. Sin embargo,
existen ejemplos de incrustaciones donde se ha mostrado que la dimensión N puede ser
mucho menor que n(n+1)/2. Si N es el número más pequeño para el cual la incrustación
existe, se dice que N − n representa la clase del espacio de Riemann. Un ejemplo de
esto lo constituyen los espacios de Riemann conformes planos de dimensión n, los cuales
pueden ser incrustados en espacios planos de dimensión n + 2, y por lo tanto son de
clase 2. Otro ejemplo es el espacio de Schwarzschild en 4 dimensiones, el cual puede ser
incrustado en un espacio plano de dimensión 6.
Existen distintas maneras de obtener las ecuaciones de Gauss-Codacci. Posiblemente
la forma más directa esta basada en el uso de la ecuación de Gauss-Weingarten
∇i ej = ǫKij n + (3) Γk ji ej ,
(3.1.9)
donde {ei }i=1,2,3 es una base coordenada en la hipersuperficie Σ, n es el vector normal
a esta y ǫ = n · n. Se tiene entonces que
∇j ∇k ei = ǫKik,j n − ǫKik Kj m em + (3) Γm ik,j em + (3) Γm ik (ǫKjm n + (3) Γn mj en ). (3.1.10)
En consecuencia
R(ej , ek )ei = ([∇j , ∇k ] − ∇[ej ,ek ] )ei
= ǫ(Dj Kik − Dk Kij )n + em [ǫ(Kij Kk m − Kik Kj m ) + (3) Rm ijk(3.1.11)
].
de donde se obtienen las expresiones
(4)
(4)
R⊥ ijk = Dj Kik − Dk Kij ,
Rm ijk = ǫ(Kij Kk m − Kik Kj m ) + (3) Rm ijk ,
(3.1.12)
donde ⊥ denota la componente a lo largo del vector normal n, y se ha usado el hecho
de que
Rαβγδ = eα · R(eγ , eδ )eβ .
(3.1.13)
Las Ecuaciones (3.1.12) constituyen las ecuaciones de Gauss-Codacci.
60
3.2.
Formulación de valores iniciales
Ecuaciones de Einstein en vacı́o
El problema de valores iniciales puede formularse como el problema de construir un
espacio-tiempo (M, gab ) globalmente hiperbólico a partir de datos iniciales (hab , Kab )
definidos en una hipersuperficie Σ, de tal modo que Σ sea una superficie de Cauchy
para (M, gab ). En una base coordenada se tiene que el tensor de Einstein Gab se escribe
como
1
Gµν = − g αβ (−∂β ∂ν gµα − ∂β ∂µ gνα + ∂α ∂β gµν + ∂µ ∂ν gαβ )
2
1
+ gµν g αβ g ρσ (−∂β ∂ρ gσα + ∂α ∂β gρσ ) + Fµν (g, ∂g),
2
(3.2.1)
donde F es una función no lineal de sus argumentos. Ya que la ecuación
Gµ ⊥ := Gµν nν = 0,
(3.2.2)
no contiene segundas derivadas de la métrica gµν con respecto al tiempo, se tiene que
esta relación impone condiciones en los valores que pueden tomar hµν y Kµν inicialmente
sobre la hipersuperficie Σ. Al proyectar a lo largo del vector normal n se tiene que
1
0 = G⊥⊥ = ((3) R + (K a a )2 − Kab K ab ),
2
0 = hb a Gb ⊥ = Db K b a − Da K b b .
(3.2.3)
Estas dos ecuaciones son las constricciones a los valores que la curvatura extrı́nseca y el
tensor de Riemann asociado a hab pueden tomar sobre la hipersuperficie Σ inicialmente.
La primera relación se denomina constricción Hamiltoniana, mientras que la segunda
se llama constricción del momento.
A partir de la identidad de Bianchi ∇a Gab = 0, es posible mostrar que si estas
constricciones son satisfechas sobre la hipersuperficie Σ al tiempo inicial t = 0, y si
las componentes espaciales de las ecuaciones de Einstein también lo son, entonces las
constricciones seguirán cumpliéndose a tiempos posteriores. Este resultado se obtiene
al considerar las ecuaciones
0 = ∇0 G00 + ∇i Gi0 ,
0 = ∇0 G0i ,
(3.2.4)
las cuales constituyen un sistema de ecuaciones diferenciales describiendo la evolución
temporal de las componentes G00 , G0i , o en otro términos, de las componentes G0 ⊥ , Gi ⊥ .
Ya que estas componentes se anulan inicialmente, se tiene que deben ser idénticamente
nulas.
3.3 Existencia y unicidad local
3.2.1.
61
Coordenadas harmónicas y ecuaciones reducidas
De manera general se tiene que las ecuaciones de Einstein en el vacı́o pueden escribirse como
1
1
1
0 = Rµν = − g ρσ ∂ρ ∂σ gµν − gρµ ∂ν H ρ − gρν ∂µ H ρ + Jµν (g, ∂g),
2
2
2
(3.2.5)
donde J es una función no lineal de sus argumentos y H ρ := ∇σ ∇σ xρ . Una elección que
simplifica el estudio de la existencia y unicidad local de una solución a las ecuaciones
de Einstein se basa en el uso de coordenadas armónicas normales, definidas por medio
de la ecuación
√
1
1
0 = ∇ν ∇ν xµ = √ ∂ν ( −gg νµ ) = ∂ν g νµ + g νµ g ρσ ∂ν gρσ .
(3.2.6)
−g
2
En este caso las ecuaciones de Einstein toman la forma
1
arm.
0 = Rµν
:= − g ρσ ∂ρ ∂σ gµν + Jµν (g, ∂g),
2
(3.2.7)
las cuales se denominan ecuaciones reducidas de Einstein.
3.3.
Existencia y unicidad local
Considérense que las formas hab y Kab se encuentran definidas en una hipersuperficie
Σ, las cuales satisfacen las restricciones dadas en Eq. (3.2.3). Escogase un sistema
∂gµν
)
coordenado xµ en una porción de Σ y considérese la pareja de valores iniciales (gµν ,
∂t
∂gµν dada por gµν |Σ = hµν y
= Kµν .
∂t Σ
Para datos iniciales donde la métrica es cercana a la métrica Minkowskiana y la
curvatura toma valores pequeños, se tiene que las ecuaciones reducidas de Einstein
pueden ser resueltas en una vecindad O de Σ cubierta por las coordenadas xµ , de modo
tal que se obtenga un espacio-tiempo globalmente hiperbólico cuya superficie de Cauchy
sea O. Este espacio-tiempo será una solución a las ecuaciones de Einstein si la condición
H µ = 0 se satisface en todo punto en O. Para ver esto basta con examinar el tensor de
Einstein, el cual se escribe como
1
1
arm.
Gµν = Rµν
− Rarm. gµν − (gρµ ∂ν H ρ + gρν ∂ρ H ρ − gµν ∂ρ H ρ ).
2
2
(3.3.1)
∂H ρ
Ya que Gµ ⊥ = 0 en Σ y H ρ = 0 también en Σ, se tiene de esta ecuación que
= 0 en
∂t
Σ si las ecuaciones de Einstein reducidas se cumplen. Por otro lado, es posible obtener
una ecuación para la evolución temporal de H ρ por medio de la identidad de Bianchi,
de la cual se obtiene
1
0 = ∇µ Gµν = − gσν g ρµ ∂ρ ∂µ H σ + Lν (g, ∂H ρ),
2
(3.3.2)
62
Formulación de valores iniciales
donde Lν es una función lineal de ∂H ρ , no necesariamente lineal en gµν . Esta ecuación
∂H ρ
admite una solución única, y ya que los valores iniciales de H ρ y
se anulan, se
∂t
ρ
deduce entonces que H debe anularse idénticamente en todo punto donde la solución
a las ecuaciones de Einstein reducidas existe.
La unicidad local de las soluciones con valores iniciales involucra la existencia de un
difeomorfismo ψ relacionando las soluciones en un sistema de coordenadas arbitrario
con la solución en un sistema coordenado armónico. En este caso el difeomorfismo ψ se
construye a partir de un difeomorfismo φ : O → O arm. , el cual relaciona las componentes
de la métrica ası́ como su derivada temporal en ambos sistemas al momento inicial.
Usando la aplicación inversa φ−1 : O arm. → O, es posible trasladar las coordenadas
armónicas a la vecindad O. El difeomorfismo Ψ es entonces el mapeo que asigna a cada
punto de O un punto en O arm. con los mismos valores de las coordenadas armónicas.
Observación La restricción de datos iniciales cercanos al espacio-tiempo Minkowskiano
puede eliminarse del modo siguiente: mediante una transformación de coordenadas es
posible hacer que la métrica gµν sea igual a la Minkowskiana ηµν en un punto p de
la hipersuperficie Σ, donde los valores iniciales están definidos, y tal que xµ |p = 0.
Haciendo el escalamiento
gµν → λ−2 gµν ,
∂gµν
∂gµν
→ λ−2
,
∂t
∂t
(3.3.3)
de los valores iniciales, con λ una constante, seguido de una transformación de coordenadas xµ → x′µ := λ−1 xµ , de modo a obtener
′
gµν
(x′ρ ) =
∂xα ∂xβ −2
λ gαβ (xρ ) = λ · λ · λ−2 gµν (λx′ρ ) = gµν (λx′ρ ),
∂x′µ ∂x′ν
(3.3.4)
y
′
∂gµν
∂gµν
(x′ρ ) = λ
(λx′ρ ).
(3.3.5)
′
∂t
∂t
De este modo en el lı́mite cuando λ → 0, se tiene que los datos iniciales pueden hacerse
arbitrariamente cercanos a los Minkowskianos para obtener el resultado anterior.
3.4.
Existencia y unicidad global
Puede mostrarse existencia global de una solución a las ecuaciones de Einstein en
toda la hipersuperficie Σ, la cual se admite paracompacta, mediante el uso de mapeos
isométricos que permiten unir las distintas soluciones obtenidas en las vecindades que
cubren Σ. Este proceso permite construir un espacio-tiempo globalmente hiperbólico,
el cual tiene como superficie de Cauchy a Σ.
Unicidad global por el contrario esta basada en el uso del lema de Zorn [19, 20],
el cual afirma que si todo subconjunto totalmente ordenado de un conjunto S posee
un cota superior, entonces el conjunto S tiene un elemento maximal. En el caso de
3.4 Existencia y unicidad global
63
espacio-tiempos globalmente hiperbólicos, la relación de orden (parcial) esta definida co1
2
2
1
mo (M 1 , gab
) ≥ (M 2 , gab
) si (M 2 , gab
) puede ser mapeado isométricamente en (M 1 , gab
),
manteniendo la superficie de Cauchy inalterada. Ya que esta relación esta definida para
1
2
todo para de espacio-tiempos globalmente hiperbólicos (M 1 , gab
), (M 2 , gab
), se tiene
que la relación de orden permite que el conjunto de todos los espacio-tiempos globalmente hiperbólicos modulo difeomorfismos constituye un conjunto totalmente ordenado
y en consecuencia existe un espacio-tiempo maximal (M, gab ) que no puede ser mapeado isométricamente en cualquiera otro espacio-tiempo. Esto conduce a la unicidad de
(M, gab ), el cual tiene la propiedad de que todo espacio-tiempo globalmente hiperbólico con datos iniciales en la hipersuperficie Σ, puede ser mapeado isométricamente a
(M, gab ) [21].
Ejercicios
1. El dar valores iniciales apropiados que satisfagan las constricciones generales
(3)
R + (K a a )2 − Kab K ab = 16πTab na na =: 16πρ,
Db K b a − Da K b b = −8πTab nb =: −8πJa ,
asociadas a la curvatura extrı́nseca Kab y el tensor de Riemann (3) Rabcd puede
constituir un proceso complicado de llevar a cabo, sin embargo existen técnicas que
permiten resolver las constricciones Hamiltoniana y de la densidad de momento,
a fin de obtener una descomposición única del espacio-tiempo.
Considere soluciones a las ecuaciones de Einstein cuya curvatura extrı́nseca posee
traza nula, i.e., K = 0, y escriba la métrica inducida hab como
hab = φ4 h̃ab ,
donde φ es un factor conforme y h̃ab una métrica auxiliar. Defina del mismo modo
la transformación de la curvatura extrı́nseca del modo siguiente
Kab = φ−2 K̃ab .
Muestre que la constricción asociada a la densidad de momento se escribe
como
φ−6 D̃b K̃ b a = −8πJa .
Muestre que en una variedad de 2+1 dimensiones, la constricción Hamiltoniana esta dada por
φ−4 (3) R̃ + 4φ−6h̃ab D̃a φD̃b φ − 4φ−5h̃ab D̃a D̃b φ = K̃ ab K̃ab .
Esta expresión es una ecuación diferencial para φ, la cual una vez resuelta
permite encontrar K̃ab por medio de la constricción asociada a la densidad de
momento. De este modo, utilizando una transformación conforme, se pueden
determinar completamente los valores de hab y Kab que satisfacen las constricciones requeridas por el problema de valores iniciales.
64
Formulación de valores iniciales
2. Un ejemplo de una ecuación diferencial que posee un problema de Cauchy mal
definido esta dado por
u,tttt − 2u,ttxx − 3u,ttyy + u,xxxx + 3u,xxyy + 2u,yyyy + u,xxy = 0.
Considere soluciones a esta ecuación de la forma u(t, x, y) = ũ(t, x cos α + y sin α),
con α ∈ R. Muestre que para cada valor fijo de α, se obtiene una ecuación para
ũ en una dimensión, la cual tiene un problema de Cauchy bien definido.
3. Sea la métrica de Milne
ds2 = dt2 − t2 (dx2 + e2x dy 2 + dz 2 ),
la cual es de la forma general
ds2 = dt2 − e2α(t,x) dx2 − e2β(t,x) dx2 − e2γ(t,x) dx2 ,
con α = ln t y β = γ = ln t + x.
Considere soluciones de las ecuaciones de Einstein alrededor de la solución
de Milne. Pruebe que las perturbaciones α̂ y β̂ satisfacen el siguiente sistema
de ecuaciones
−α̂,τ τ = 3α̂,τ + 2β̂,τ + 2α̂,x + 4α̂ − 2β̂,xx − 4β̂,x ,
−β̂,τ τ = α̂,τ + 4β̂,τ + α̂,x + 4α̂ − β̂,xx − 4β̂,x ,
donde τ := ln t, a orden más bajo.
Sean ω y ξ variables de Fourier asociadas a τ y x respectivamente. Muestre
que soluciones de la forma exp[i(ωτ + ξx)] conducen a la siguiente ecuación
cúbica para ω
ω 3 − 7iω 2 + (−ξ 2 + 2iξ − 14)ω + (iξ 2 + 2ξ + 8i) = 0.
Encuentre las raı́ces de esta ecuación y argumente si el sistema de ecuaciones
para α̂ y β̂ admite o no un problema de Cauchy bien definido.
Bibliografı́a
[1] R. Penrose, Techniques of differential topology in relativity. Society for Industrial
and Applied Mathematics, 1972.
[2] S. W. Hawking and G. F. R. Ellis, The Large scale structure of space-time.
Cambridge University Press, 1973.
[3] R. M. Wald, General Relativity. Chicago University Press, 1984.
[4] R. Penrose, “Singularities and time asymmetry,” in General Relativity: An
Einstein Centenary Survey (S. W. Hawking and W. Israel, eds.), pp. 581–638,
Cambridge University Press, 1980.
[5] R. Abraham, J. E. Marsden, and T. S. Ratiu, Manifolds, tensor analysis and
aplications. Springer, 2003.
[6] N. J. Hicks, Notes on differential geometry. Van Nostrand, 1965.
[7] R. P. Geroch, “The domain of dependence,” J. Math. Phys. 11 (1970) 437–439.
[8] R. P. Geroch, “Spinor structure of space-times in general relativity I.,” J. Math.
Phys. 9 (1968) 1739–1744.
[9] J. H. C. Whitehead, “On c1 -complexes,” Ann. of Math. 41 (1940) 809–824.
[10] J. Leray, “Hyperbolic differential equations.” mimeographed notes. Institute for
Advanced Study, Princeton, 1952.
[11] E. M. Lifshitz and I. M. Khalatnikov, “Investigations in relativistic cosmology,”
Adv. Phys. 12 (1963) 185–249.
[12] J. D. Barrow and S. Cotsakis, “Inflation and the Conformal Structure of Higher
Order Gravity Theories,” Phys. Lett. B214 (1988) 515–518.
[13] K. Maeda, “Towards the Einstein-Hilbert Action via Conformal Transformation,”
Phys. Rev. D39 (1989) 3159.
[14] S. Cotsakis and J. Miritzis, “A note on wavemap-tensor cosmologies,”
arXiv:gr-qc/0107100.
66
BIBLIOGRAFÍA
[15] A. Raychaudhuri, “Relativistic cosmology. I,” Phys. Rev. 98 (1955) 1123–1126.
[16] S. W. Hawking and R. Penrose, “The Singularities of gravitational collapse and
cosmology,” Proc. Roy. Soc. Lond. A314 (1970) 529–548.
[17] A. H. Taub, “Empty space-times admitting a three parameter group of motions,”
Annals Math. 53 (1951) 472–490.
[18] J. Plebański and A. Krasiński, An Introduction to General Relativity and
Cosmology. Cambridge University Press, 2006.
[19] C. Kuratowski, “Une méthode d’elimination des nombres transfinis des
raisonnements mathématiques,” Fundamente Mathematicae 3 (1922) 76–108.
[20] M. Zorn, “A remark on method in transfinite algebra,” Bull. Amer. Math.
Society 41 (1935) 667–670.
[21] Y. Choquet-Bruhat and R. P. Geroch, “Global aspects of the Cauchy problem in
general relativity,” Commun. Math. Phys. 14 (1969) 329–335.
Índice alfabético
borde, 13
campo de Jacobi, 37
causalidad fuerte, 9
censura cósmica, VI
condición
débil de energı́a, 33
dominante de energı́a, 33
fuerte de energı́a, 33
condición
genérica nula, 45
condición genérica de tipo tiempo, 39
congruencia, 31
conjunto acronal, 5
cono de luz, 1
constricción
del momento, 60
Hamiltoniana, 60
curva
causal, 2
continua, 6
convergencia, 7
lı́mite, 8
sin fin en el futuro, 7
temporal, 2
dominio
de dependencia
futuro, 13
pasado, 14
total de dependencia, 14
ecuación
de Raychaudhuri, 32
ecuaciones
de Gauss-Codacci, 59
reducidas de Einstein, 61
elemento de volumen futuro, 21
elemento de volumen pasado, 21
escalar
de distorsión, 30
de rotación, 30
escalar de expansión, 29
espacio
V̂p , 35
Ṽp , 35
globalmente hiperbólico, 14
espacio-tiempo
sin fin, 28
singular, 28
establemente causal, 11
expansión isotrópica, 29
factor conforme, 26
fuertemente causal, 9
futuro causal
de un punto, 3
de un subconjunto, 3
futuro cronológico
de un punto, 2
de un subconjunto, 2
horizonte de Cauchy
futuro, 16
pasado, 16
propagación causal, 58
punto
de convergencia, 7
final futuro, 6
lı́mite, 8
puntos conjugados, 37
68
singularidad
de curvatura
escalar, 28
de curvatura
propagada paralelamente, 28
sin curvatura, 28
superficie
atrapada, 53
de Cauchy, 14
superficies estrictamente tipo espacio, 24
tensor
de distorsión, 30
de rotación, 30
variedad orientable en el tiempo, 1
vector dirigido
al futuro, 1
ÍNDICE ALFABÉTICO