Un ejemplo de cálculo de las lı́neas geodésicas mediante la conservación del momento
Consideramos una superficie S con parametrización regular Φ(u, v), u > 0. Damos a S la
4
2
2
2
siguiente métrica de Riemann: Q ≡
u (du) + u (dv) .
Cada geoésica α(t) ≡ Φ u(t) , v(t) para Q, parametrizada por longitud de arco Riemanniano,
lleva asociada una constante m tal que a lo largo de α se cumplen las dos identidades siguientes:
u4 u0 (t)2 + u2 v 0 (t)2 ≡ 1
(1)
u2 v 0 (t) ≡ m
A lo largo de cualquier reparametrización β(λ) de α, tenemos (atención al exponente grande):
u2 v 0 (λ)
2
u4 u0 (λ)2 + u2 v 0 (λ)2
≡
dt
dλ
dt
dλ
2
·
u2 v 0 (t)
2
2 u4 u0 (t)2 + u2 v 0 (t)2
≡
m2
≡ m2 .
1
(2)
La constante ±m es la misma para todas las parametrizaciones regulares de una lı́nea geodésica
dada, y es el momento de esa lı́nea geodésica.
Buscamos primero las lı́neas geodésicas con momento nulo. Vemos en (1) que la parametrización
por arco Riemanniano de una tal lı́nea tiene que cumplir v ≡ v0 (valor constante). Fijado un
valor v0 , y fijada una parametrización por arco Riemanniano αv0 (t) de la lı́nea {v = v0 }, para
todo u0 > 0 existe el camino geodésico αu0 ,v0 (t) con punto inicial Φ(u0 , v0 ) y velocidad inicial
u−2
0 Φu (u0 , v0 ), el cual se ve obligado a cumplir v ≡ v0 y a ser parte de αv0 (t) salvo sumar una
constante a t. Concluimos que αv0 (t) es camino geodésico, luego cada lı́nea {v = v0 } es, toda
ella, geodésica para Q. Éstas, o tramos de ellas, son las lı́neas geodésicas de momento nulo.
Buscamos
ahora las lı́neas geodésicas con momento no nulo. Salvo cambiar de α(t) a β(t̃) ≡
α − t̃ , podemos suponer m > 0. Puesto que ahora v 0 (t) > 0, la función inversa t−1 (v) existe en
todo el camino y es suave. Esto nos permite dar la misma lı́nea por un camino v 7→ Φ u(v) , v
en el que u ha sido puesto como función suave de v. Este nuevo camino no es geodésico porque
tiene rapidez variable pero, como hemos explicado, la igualdad (2) es válida para él. Entonces
llegamos a:
u4
m2 =
.
2
du
4
2
u
+u
dv
Despejamos la derivada y procuramos que multiplique a todo lo que dependa de la función
incógnita u(v):
du
dv
2
=
u4 − m2 u2
m2 u4
,
du
±1 p 2
=
u − m2
dv
mu
,
√
±m u du
= 1.
u2 − m2 dv
Integramos respecto de v y aparece una constante de integración v0 :
p
±m u2 − m2 = v − v0 .
Elevamos al cuadrado para eliminar la ambigüedad de signo: m2 u2 − m4 = (v − v0 )2 . Para
cada camino geodésico de momento no nulo hemos hallado dos constantes m, v0 , la m positiva,
tales que el correspondiente camino en el plano de parámetros uv está contenido en la siguiente
rama de hipérbola:
1 2
1
2
Γm,v0 =
(u, v) :
u − 4 (v − v0 ) = 1 , u > 0 .
m2
m
1
Tomando un camino geodésico maximal α(t), t ∈ J (es decir, no prolongable a ningún intervalo J 0 mayor que J) se deduce, igual que hemos hecho para momento nulo, que un tal α(t)
recorre la totalidad de la curva Φ(Γm,v0 ) ⊂ S. Luego estas curvas son las lı́neas geodésicas
maximales de momento no nulo.
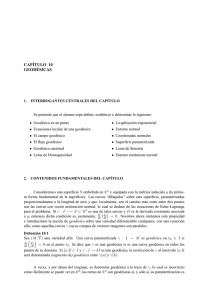
Cada rama de hipérbola Γm,v0 tiene vértice (m, v0 ) y ası́ntotas {v − v0 = ±m u}. El siguiente
dibujo muestra el semiplano uv con u > 0 y en él las preimágenes de cuatro geodésicas, con el
mismo valor para v0 y valores respectivos 1/2, 1, 2 y 0 para el momento:
Al ir variando el valor del parámetro v0 , todo el dibujo se traslada “verticalmente” (en la
dirección del eje v). Por eso es tan importante tener en cuenta la constante de integración v0 :
si la hubiéramos olvidado, habrı́amos ignorado todas estas trasladadas verticales.
Dos ramas de hipérbola, con el mismo v0 pero distintos
pmomentos positivos m0 , m1 , comparten
exactamente dos puntos. Éstos están dados por u = m20 + m21 y v = v0 ± m0 m1 .
2
 0
0