4 Componentes funcionales y parámetros
Anuncio

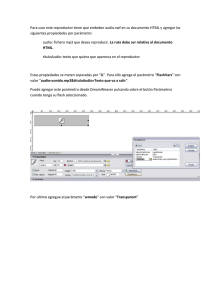
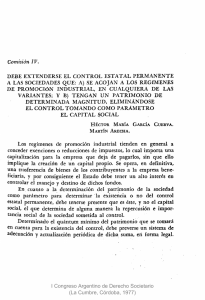
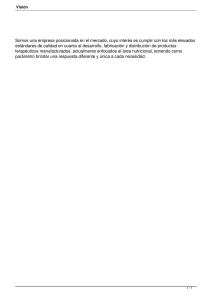
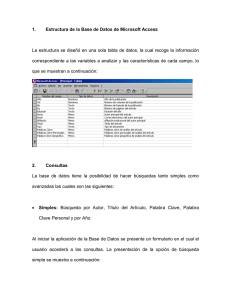
04.99 Componentes funcionales y parámetros 4 Componentes funcionales y parámetros Funciones de regulación En el software del convertidor y del ondulador se encuentran una serie de funciones de control, regulación, comunicación, diagnóstico etc. que se pueden activar con ayuda de componentes funcionales. Estos componentes funcionales son parametrizables y se pueden enlazar libremente entre sí. El método es comparable a la técnica de conexiones en circuitos eléctricos, en la que se entrelazan las diferentes unidades funcionales, p.ej. circuitos de conmutación u otros componentes electrónicos por medio de cables. Sin embargo, al contrario de la técnica de conexión eléctrica, el "cableado" (enlace) de los componentes funcionales no se realiza por medio de cables, sino a través del software. 4.1 Componentes funcionales En los componentes funcionales se encuentran funciones incorporadas. El alcance funcional de cada componente depende de su aplicación específica. Los componentes funcionales disponen de entradas, salidas, y parámetros y se procesan en niveles de tiempo. Parámetro funcional Parámetro de conector Kp para n-reg. 0.0 ... 200.0 P235.F (1.0) Tn del n-reg. 0 ... 1000 ms P240.F (100) Kp Tn U953.14 = 2 Dif. de regul. P228.B KK0152 Liberación de n-reg. del control de secuencia [460.8] Nivel de tiempo N° de componente funcional Componente funcional M(consigna) K0153 r238 M(consigna) Enlace fijo Parámetro para tabla de niveles de tiempo Conector Parámetro de observación B0310 Binector Remisión a otros planos funcionales [página.columna] Figura 4-1 Representación de un componente funcional Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 4-1 Componentes funcionales y parámetros Número de componente funcional 04.99 Cada componente funcional dispone de un número de componente funcional (número CF) que lo identifica claramente. En múltiples componentes se puede definir con ayuda del número de CF, el nivel de tiempo en el que se van ha procesar. Con este fin, a cada componente funcional le corresponde un parámetro indexado, cuyo número e índice de parámetro contiene el número de CF referido. Ejemplo: U950.01 codifica el número de CF 001 U952.50 codifica el número de CF 250 U952.99 codifica el número de CF 299 U953.74 codifica el número de CF 374 En los planos funcionales se indica para cada componente funcional el parámetro para seleccionar el nivel de tiempo y el ajuste de fábrica correspondiente. Estos datos se encuentran dentro de una elipse para hacerlos resaltar ópticamente de los demás elementos de un componente funcional. Junto al nivel de tiempo, en la mayoría de los componentes funcionales; puede ser también determinada la secuencia de procesamiento. 4.2 Conectores y binectores Conectores y binectores son elementos que sirven para el intercambio de señales entre las componentes funcionales. Son alimentados cíclicamente por componentes funcionales con un valor de señal. Según se haya parametrizado, hay otros componentes funcionales que están en la capacidad de llamar a esos valores. Conectores Los conectores pueden ser considerados como casilleros de archivo para almacenar señales "analógicas". Están claramente definidos. Cada denominación de conector está compuesta por el nombre y número del conector y una letra indicativa. La letra indicativa depende de la representación numérica: ♦ K conector de una palabra (16 bits) ♦ KK conector de palabra doble (32 bits, mayor exactitud) El número de conector se da siempre con cuatro cifras. Nombre del conector M(consig,n-reg.) K0153 Letra indicativa Figura 4-2 4-2 Nombre del conector n(cna.alisam.) KK0150 N° del conector Letras indicativas N° del conector Representación de conectores con palabras de 16 bits y 32 bits 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 04.99 Componentes funcionales y parámetros Campo de valores de los conectores Salvo algunas excepciones (p.ej. conectores para las palabras de mando), los valores archivados en los conectores están normalizados. El campo de valores de estos conectores alcanza unos valores que van desde (en %): ♦ -200 % (8000H / 8000 0000H en conectores de palabra doble) a ♦ +199,99 % (7FFFH / 7FFF FFFFH en conectores de palabra doble). 100% correspondería al valor 4000H (4000 0000H en conectores de palabra doble). 100 % 100 % 4000H 4000 0000H 1H = 0,006 % 1H = 0,000 000 093 % 199,994 % 7FFFH 0000H 0% -200 % 8000H FFFFH -0,006 % 199,999999907 % 7FFF FFFFH FFFF FFFFH C000H C000 0000H -100 % -100 % Conector con longitud de palabra (Kxxxx) Figura 4-3 Binectores 0000 0000H -200 % 8000 0000H 0% -0,000000093 % Conector con longitud de palabra doble (KKxxxx) Valores y correspondencias del campo numérico de conectores Los componentes funcionales depositan las informaciones digitales de salida en conectores binarios llamados binectores. Los binectores pueden ser considerados como casilleros de archivo para almacenar señales binarias. Están claramente definidos. Cada denominación de binector está compuesta por el nombre y número del binector y la letra indicativa B El número del binector se da siempre con cuatro cifras. Los binectores, de acuerdo con su definición, pueden tomar los dos estados siguientes: 0 ("no" lógico) y 1 ("sí" lógico). Nombre de binector Acelerac.activa B0201 Letra indicativa Figura 4-4 N° de binector Representación de binectores Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 4-3 Componentes funcionales y parámetros 4.3 04.99 Parámetros Los parámetros son las vías de acceso para la adaptación de los componentes funcionales a la aplicación, para interconectar los componentes funcionales por medio de conectores y binectores y para la observación de señales internas. Los parámetros se diferencian de acuerdo a sus funciones en: ♦ Parámetros funcionales (se pueden leer y escribir) ♦ Parámetros BICO (se pueden leer y escribir) ♦ Parámetros de observación (solo se pueden leer) Cada parámetro está claramente definido. La identificación de parámetro consta del nombre de parámetro y del número de parámetro. Junto al nombre y número de parámetro muchos parámetros poseen también un índice. Con ayuda de este índice es posible archivar varios valores para un parámetro bajo un número de parámetro. En los planos funcionales se encuentran los ajustes de fábrica de cada parámetro BICO y de cada parámetro funcional. Para los parámetros funcionales modificables, se incluye además el campo de valores. Número de parámetro en la Parametrización Unit (PMU) En la unidad de parametrización (PMU) integrada en el equipo los números de parámetros se visualizan, con una letra y un número de tres cifras. Las letras se aplican de la siguiente forma: ♦ Las mayúsculas (P, U, H y L) designan a los parámetros BICO y a los parámetros funcionales (ambos tipos modificables) ♦ Las minúsculas (r, n, d y c) designan a los parámetros de observación (no modificables ) La cifra de tres números abarca un campo de valores de 000 a 999, pero no se utilizan todos. Número de parámetro en el Operation Panel (OP1S) El panel de mando OP1S ofrece la posibilidad de seleccionar directamente un parámetro a través de su número. Como el OP1S dispone únicamente de un teclado numérico, se tiene que sustituir el número de parámetro por una cifra aplicándose la siguiente conversión: ♦ "P"xxx y "r"xxx se sustituyen por "0"xxx ♦ "H"xxx y "d"xxx se sustituyen por "1"xxx ♦ "U"xxx y "n"xxx se sustituyen por "2"xxx ♦ "L"xxx y "c"xxx se sustituyen por "3"xxx Ejemplo: Parámetro r004 vía OP1S: Parámetro P050 vía OP1S: Parámetro U123 vía OP1S: Parámetro L411 vía OP1S 4-4 introducir la cifra 0004 introducir la cifra 0050 introducir la cifra 2123 introducir la cifra 3411 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 04.99 Parámetros funcionales Componentes funcionales y parámetros Con los parámetros funcionales se determina el comportamiento de los componente funcionales. Ejemplos típicos de aplicación de un parámetro funcional serían: ♦ Normalización de una señal de entrada ♦ Tiempo de aceleración y deceleración en el generador de rampas ♦ Amplificación proporcional (Kp) y tiempo de reajuste (Tn) en el regulador de velocidad. Los parámetros funcionales pueden estar indexados. El significado de los valores que se encuentran en los índices depende de la definición del parámetro correspondiente. Existe un grupo especial de parámetros que pertenecen a los llamados juegos de datos funcionales. Nombre de parámetro T1 elemento DT1 0.0 ... 10.0 ms Campo de P249.F (0.0) valores N° de parámetro Figura 4-5 Juegos de datos funcionales (juegos de datos de consigna) Indice parámetro Ajuste de fábrica Representación de parámetros funcionales En los juegos de datos funcionales se encuentran recopilados parámetros funcionales especiales. En los planos funcionales estos parámetros se designan con el índice de parámetro .F. Los parámetros aludidos poseen cuatro índices. Esto significa que en cada parámetro, bajo cada índice hay un valor, o sea bajo un número de parámetro se puede archivar un total de cuatro valores de parámetro. El juego de datos funcionales activo determina el valor que se utiliza. Si está activo el juego de datos funcionales 1 se utilizará el valor que se encuentra en el índice de parámetro 1. Si está activo el juego de datos funcionales 2 se utilizará el valor que se encuentra en el índice de parámetro 2 etc. Ejemplo: P462.1 = 0.50 P462.2 = 1.00 P462.3 = 3.00 P462.4 = 8.00 En el parámetro P462 (tiempo de aceleración) se encuentran archivados 4 valores. Si está activo el juego de datos 1, el valor del tiempo de aceleración es de 0.50 s. Si está activo el juego de datos 2, el valor del tiempo de aceleración es de 1.00 s. Si está activo el juego de datos 3, el valor del tiempo de aceleración es de 3.00 s y si está activo el juego de datos 4, el valor del tiempo de aceleración es de 8.00 s. La selección de cada uno de los juegos de datos funcionales se realiza por medio de los bits 16 y 17 en la palabra de mando 2 (P576.B y P577.B). Se puede hacer la conmutación en todo momento. La visualización de los juegos de datos funcionales activos se realiza a través del parámetro de observación r013 (JdD-Func.activo). Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 4-5 Componentes funcionales y parámetros 04.99 INDICACION La conmutación (entre los índices de parámetro 1, 2, 3 y 4), se realiza siempre conjuntamente en todos los parámetros indexados pertenecientes a los juegos de datos funcionales Parámetros BICO Con los parámetros BICO se determina la fuente de las señales de entrada de un componente funcional. Vd. puede definir con ayuda de ellos de que conectores y binectores debe leer, un componente funcional sus señales de entrada. De está manera puede Vd. "interconectar", de acuerdo a las exigencias, los componentes funcionales archivados en el equipo. A esta técnica se la denomina técnica BICO. Para cada parámetro BICO está determinado el tipo de señales de entrada (conector o binector) que se pueden conectar en las entradas. Los parámetros BICO poseen los siguientes indicativos: ♦ B parámetro de binector para la conexión de binectores ♦ K parámetro de conector para la conexión de conectores con palabras de 16 bits ♦ KK parámetro de conector para la conexión de conectores con palabras dobles de 32 bits No esta permitida la "interconexión" entre binectores y conectores. Sin embargo Vd. puede enlazar siempre a parámetros de conectores de una palabra y de palabra doble. Existen dos variantes de parámetros BICO: ♦ No indexados ♦ Doblemente indexados. Nombre de parámetro N° de parámetro Fte.salida digital1 Indice de parámetro/ P651.B (0) ajuste de fábrica B Binector conectable Figura 4-6 Juego de datos BICO (Juego de datos base/reserva) Nombre de parámetro Fte. n(dif.reg.) N° de parámetro P228.B (152) KK Indice de parámetro/ ajuste de fábrica Tipo de conector conectable (K o KK) Representación de conectores con longitud de palabra de 16 bits y 32 bits En los juegos de datos BICO están recopilados determinados parámetros BICO. En los planos funcionales estos parámetros se designan con el índice de parámetro .B. Los parámetros aludidos están indexados dos veces. Esto significa que en cada parámetro, bajo cada índice hay un valor, o sea se puede archivar un total de dos valores de parámetro. El juego de datos BICO activo en ese momento determina el valor a utilizar. Si está activo el juego de datos BICO 1 se utilizará el valor que se encuentra en el índice de parámetros 1. Si está activo el juego de datos BICO 2 se utilizará el valor que se encuentra en el índice de parámetros 2. 4-6 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 04.99 Componentes funcionales y parámetros Ejemplo: P554.1 = 0010 P554.2 = 2100 En el parámetro P554 (Fte.CON./DES.1) se encuentran archivados 2 valores. Si está activo el juego de datos BICO 1, la orden CON. proviene de la entrada digital 1 del equipo base. Si está activo el juego de datos BICO 2, la orden CON. proviene del bit 0 de la primera palabra de datos de proceso que recibe la interface en serie 1. La selección de cada uno de los juegos de datos BICO se realiza por medio del bit 30 en la palabra de mando 2 (P590). La visualización del juego de datos BICO activo se realiza a través del parámetro de observación r012 (JdD-BICO activo). INDICACION Parámetros de observación Se conmutan siempre en común todos los parámetros BICO entre los índices de parámetro 1 y 2. Los parámetros de observación sirven para la vigilancia interna de magnitudes (p.ej. corriente de salida momentánea). Estos parámetros únicamente se visualizan y no pueden ser modificados. Para diferenciarlos de los otros parámetros se designan, en el número de parámetro, con las letras minúsculas (r, n, d y c). Nombre parám. Tens.circ.interm. r006 N° de parámetro Figura 4-7 Representación de parámetros de observación Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 4-7 Componentes funcionales y parámetros 4.4 04.99 Enlaces de componentes funcionales (técnica BICO) Se denomina técnica BICO a la técnica con cuya ayuda se establecen enlaces entre componentes funcionales. Esto se realiza con la ayuda de binectores y conectores, de los cuales se deriva el nombre de técnica BICO. Un enlace entre dos componentes funcionales consta, por un lado de un conector o un binector y por otro de un parámetro BICO. La unión se establece siempre en la entrada de un componente funcional. A una entrada siempre se le tiene que asignar una salida. La asignación se realiza del siguiente modo: en un parámetro BICO se registra el número del conector o del binector, del cual se leen las señales de entrada necesarias. Está permitido registrar varias veces el mismo número de conector y binector en diferentes parámetros BICO. Con esto se pueden utilizar las señales de salida de un componente funcional como señales de entrada para varios componentes funcionales. Ejemplo: En la siguiente figura se enlaza el conector K0153 al parámetro de conector P260. Para ello se le tiene que asignar como valor al parámetro de conector P260 el número del conector K0153 es decir, 153. Componen.funcional A Componen.funcional B Fte. n(dif.reg.) n(dif.reg.) KK0152 Fte. n(dif.reg.) n(dif.reg.) P228.B KK KK0152 P228.B KK0152 P.ej.: P228.01 = 0152 Figura 4-8 Bxxxx Pxxx.B B Bxxxx Pxxx.B K Enlace de dos componentes funcionales Pxxx.B K 100 % = 4000 H K 100 % = 4000 H Bxxxx Pxxx.B KK K Figura 4-9 4-8 K 100 % = 4000 H Pxxx.B KK 100 % = 4000 0000 H Pxxx.B KK 100 % = 4000 0000 H KK 100 % = 4000 0000 H Pxxx.B B KK KK 100 % = 4000 0000 H Pxxx.B K 100 % = 4000 H Pxxx.B B Enlaces BICO posibles y no posibles 6SE7087-8QX50 (Edición AD) Siemens AG Compendio Motion Control SIMOVERT MASTERDRIVES 04.99 Interconexión entre diferentes tipos de conectores Componentes funcionales y parámetros Según el tipo, los conectores son magnitudes de una palabra (16 bits) o de palabra doble (32 bits). En consecuencia, los componentes funcionales disponen de parámetros BICO adecuados para la conexión del tipo de conector correspondiente. En principio es posible mezclar los diferentes tipos de conectores ya que se realiza automáticamente una adaptación de la longitud de palabra según la siguiente tabla: Enlace de un conector de una palabra a Parámetro de conector Queda el mismo valor de una palabra El valor se transmite a la Parámetro de conector palabra High, de palabra doble a la palabra Low se le da el valor de 0000H Enlace de un conector Parámetro de conector Se transmite el valor de la de una palabra palabra High, la palabra Low desaparece de una palabra doble a Tabla 4-1 INDICACION Parámetro de conector Queda el mismo valor de palabra doble Interconexión entre diferentes tipos de conectores Al enlazar un conector de palabra doble a un parámetro de conector de una palabra, baja la resolución de señal de 32 bits a 16 bits. Como se corta la palabra Low, se pierde la información de los primeros 16 bits del conector de palabra doble. Siemens AG 6SE7087-8QX50 (Edición AD) SIMOVERT MASTERDRIVES Compendio Motion Control 4-9