Capacidad de carga estática generalizada en rodamientos de
Anuncio

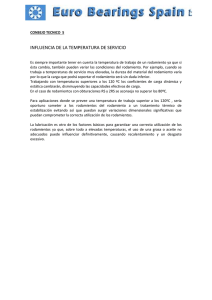
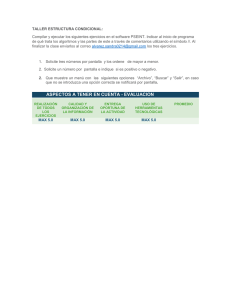
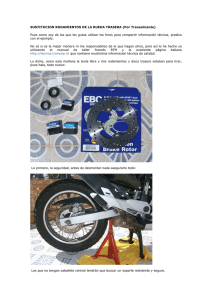
Asociación Española de Ingeniería Mecánica XVIII CONGRESO NACIONAL DE INGENIERÍA MECÁNICA Capacidad de carga estática generalizada en rodamientos de vuelco de contacto angular de 4 puntos J. Aguirrebeitia, J. Vallejo, M. Abasolo, R. Avilés, I. Fernández de Bustos Dpto. Ingeniería Mecánica. ETSI-BILBAO, Universidad del País Vasco [email protected] Resumen En este trabajo se desarrolla el cálculo de la capacidad estática de carga para rodamientos de vuelco (slewing bearings) de contacto angular de 4 puntos, bajo una solicitación general que incluye fuerza axial, fuerza radial y momento de vuelco. Este desarrollo supone una generalización de las ecuaciones de Sjoväll y Rumbarger y da como resultado la superficie de aceptación estática del rodamiento expresada en los ejes de las tres solicitaciones. Así, se calculan directamente aquellas combinaciones de carga que hacen que el elemento más solicitado se agote desde el punto de vista estático, tal y como se define en la norma, lo cual permite obtener directamente una condición tridimensional de aceptación en forma de inecuación superficial. Para ello se formula el clásico modelo de interferencia geométrica (suponiendo anillos rígidos y bolas deformables), a partir del cual se construyen las integrales que formarán parte del equilibrio de fuerzas y momentos del rodamiento. Por último, se reformulan las ecuaciones de equilibrio para dar como resultado la inecuación de aceptación. INTRODUCCIÓN Los rodamientos de vuelco (Slewing bearings, en nomenclatura internacional) son rodamientos de grandes dimensiones cuyos campos de aplicación van desde generadores de energía eólica, grúas, tanques, centros de torneado… en general se utilizan en casos en los que se ven implicados elementos funcionales de grandes dimensiones. Es muy común que estos rodamientos sean elementos conducidos, y por tanto bien el anillo exterior o bien el interior suelen tallarse a modo de engranaje. Por último, la unión de ambos anillos a la aplicación y a la fuente de potencia suele ser atornillada. Rodamiento de bolas de contacto angular de cuatro puntos Rodamiento de contacto angular de cuatro puntos con dos hileras de bolas Rodamiento de rodillos cruzados Rodamiento de tres hileras de rodillos Fig. 1. Diferentes tipos de rodamientos de vuelco. 2 J. Aguirrebeitia et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) En la Fig (1) se muestran diferentes tipos de rodamientos de vuelco que difieren entre ellos en el número de hileras y en el tipo de elemento rodante considerado. Por ello, existen rodamientos con una o dos hileras, y los elementos rodantes pueden ser bolas, rodillos cónicos o rodillos cilíndricos. Las cargas actuantes en estos rodamientos suelen contener fuerzas axiales y radiales, así como momentos de vuelco. El caso de carga más desfavorable es aquél en que la fuerza radial es perpendicular a la resultante de los momentos de vuelco y es precisamente el caso que se va a contemplar en este trabajo. Por otra parte, en la mayoría de las ocasiones, la selección de este tipo de rodamientos se realiza en primera instancia desde el punto de vista estático, puesto que la aplicación implica un número bajo de ciclos, con rangos de giro incompletos y velocidades angulares muy pequeñas. Los fabricantes de rodamientos de vuelco proporcionan curvas de aceptación que permiten determinar si un rodamiento es aceptable estáticamente para una determinada carga equivalente, calculada a partir de una combinación de las fuerzas axial y radial. Mediante un diagrama de momento-fuerza axial, esta carga equivalente permite al diseñador obtener el valor máximo del momento de vuelco que el rodamiento es capaz de soportar de forma estática. Esto se ilustra en la Fig. (2). MT C0a: Capacidad de carga axial d: Diámetro de centro de bolas C0ad/4.37 Mmax Fa Feq C0a Fig. 2. Diagrama de Momento-Fuerza Axial. Existen algunas variaciones en la forma y los límites del diagrama de la Fig. (2), según el fabricante haya aplicado algún tipo de cálculo o experimentación adicional (unos pocos) o bien se haya dedicado a copiar datos de otros fabricantes (la mayoría). De todas formas en todos ellos existe cierta ambigüedad a la hora de definir las cargas equivalentes y no suele obedecer a criterios muy claros. El objetivo de este artículo es el desarrollo de un procedimiento para definir la superficie de los valores límite de los esfuerzos Fa, Fr y M en rodamientos de vuelco de contacto angular de 4 puntos. De esta forma se puede utilizar directamente esa representación para conocer si una combinación de cargas dada es aceptable o no. Existen varios trabajos en que se desarrollan conceptos relevantes desde el punto de vista del cálculo de la carga estática en rodamientos de vuelco de contacto angular de cuatro puntos. Amasorrain et al. desarrolla en [1] un interesante procedimiento para el cálculo de la distribución de carga en este tipo de rodamientos bajo un caso general de carga axial, radial y momento de vuelco, similar al que Zupan y Prebil utilizan en su estudio para la valoración de la influencia de parámetros geométricos y de rigidez en el cálculo de la capacidad de carga [2]. Dichos trabajos proponen una generalización de las ecuaciones obtenidas por Jones [3] en las que se calcula la distribución de carga a partir de unas acciones exteriores suministradas como dato. Lo que se pretende con este trabajo es utilizar un enfoque diferente con la intención de calcular directamente aquellas combinaciones de carga que hacen que el elemento más solicitado se agote desde el punto de vista estático, tal y como se define en [4], lo cual permite obtener directamente una condición tridimensional de aceptación en forma de inecuación superficial. Este enfoque se basa en los desarrollos de Sjoväll [5] y Rumbarger [6] para combinaciones de carga axial-radial y axial-momento respectivamente, en los cuales se supone que no existe juego en el contacto ni cambio en el ángulo de contacto con la carga, ni flexibilidad asociada a los anillos: estas hipótesis simplificativas se asumen también en el presente trabajo. Se supone también que se suministra como dato la capacidad de carga axial del rodamiento, puesto que los resultados se normalizarán respecto de ese valor. Dicho valor se calculará mediante la fórmula que se presenta a tal efecto en [4], modificada con la experiencia del fabricante en cuanto a calidad del material y parámetros geométricos. 3 Capacidad de carga estática generalizada en rodamientos de vuelco de contacto angular de 4 puntos MÉTODO En este apartado se procederá a desarrollar la sistemática que permitirá construir la condición tridimensional de aceptación del rodamiento. En primer lugar se formulará el modelo de interferencia geométrica, a partir del cual se construyen en segundo lugar las integrales que formarán parte del equilibrio de fuerzas y momentos del rodamiento. Por último, se reformularán las ecuaciones de equilibrio para dar como resultado una inecuación de aceptación. a) Modelo de interferencia geométrica En la Fig. (3) se representa la interferencia geométrica entre los elementos rodantes y los anillos de un rodamiento de vuelco de contacto angular de 4 puntos. Por simplicidad en el dibujo se supone que los anillos tienen forma cónica en vez de toroidal, y solamente se realiza el desplazamiento del anillo interior suponiendo el exterior fijo. A continuación se expresan los campos de interferencia geométrica entre anillo interior y bolas, medidos como desplazamiento normal a la pista de rodadura superior (pista 1) y a la pista inferior (pista 2). 1 a sin r cos cos 2 d a sin r cos cos 2 d 2 sin cos (1) sin cos (2) Haciendo: A a sin (3) R r cos M d 2 sin Simplificando Eq. (1) y (2) según Eq. (3) quedan: 1 A R M cos (4) 2 A R M cos (5) Los valores máximos y mínimos de las expresiones anteriores se verifican para valores extremos del ángulo ψ: 01 A R M 1 A R M (6) A R M 2 0 2 A R M El cálculo de la capacidad de carga está condicionado por dos factores. Por una parte, hay que poder detectar dónde se da la mayor interferencia (en ψ=0 o en ψ= π), para formular en consecuencia el campo de interferencia en función de la carga máxima (de vital importancia puesto que la capacidad de carga se calcula para la bola más cargada). De otro lado, lógicamente, sólo existe carga para aquellos valores de la variable ψ en los que la interferencia es positiva. Por todo lo anterior se ha de dar con un procedimiento para formular de forma adecuada el campo de interferencias según dónde se halle el valor máximo de interferencia y según cuáles sean las zonas de interferencia positiva. Según esto, Eq. (1) y (2) pueden reformularse en función de las interferencias para ψ=0 y ψ=π de la siguiente forma: (7) (8) 1 1 1 0 1 01 1 cos 2 2 1 2 0 2 02 2 cos 2 En la Tabla (1) se detallan los 5 casos de campo de interferencia que pueden darse, junto con la forma de dicho campo en función de la interferencia máxima. Para cada uno de los posibles casos se detalla cuál de las interferencias extremas es la máxima (δ0 ó δπ) y cuál es el ángulo que delimita la zona de interferencia positiva. J. Aguirrebeitia et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) d pista 1 α pista 2 ψ δr θ δa Fig. 3. Modelo de interferencia geométrica. 4 Capacidad de carga estática generalizada en rodamientos de vuelco de contacto angular de 4 puntos Tabla 1. Diferentes casos de interferencia geométrica CASO DE INTERFERENCIA 1 δ0 CONDICIONES Y ECUACIONES δπ 0 0 0 0 MAX 0 l 0 cos 1 0 1 2 δπ 2 δ0 0 0 0 0 1 1 2 0 MAX l 1 1 0 1 cos 2 2 1 0 δ0 ψl -ψl 3 l 0 0 0 MAX 0 δπ 1 0 1 2 4 δ0 ψl -ψl 0 cos 1 0 δπ 0 1 1 2 0 cos l 0 0 0 MAX 0 cos 1 0 1 1 0 1 cos 2 2 1 0 0 0 0 δ0 5 MAX 0 δπ 0 l 0 5 J. Aguirrebeitia et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) 6 b) Equilibrio de fuerzas y momentos Siguiendo la formulación de los trabajos de Sjoväll y Rumbarger, se pueden plantear los equilibrios de fuerzas y momentos de la siguiente manera, uniendo las contribuciones de la pista 1 y de la pista 2: FA 1 2 QMAX J A 01 , 1 QMAX J A 02 , 2 Z sin (9) FR 1 2 J R 01 , 1 Q MAX J R 02 , 2 Q MAX Z cos (10) M d 1 2 Q MAX J M 01 , 1 Q MAX J M 02 , 2 Z sin (11) donde JA, JR y JM son las integrales: 1 J A 0 , 2 MAX 3 2 d (12) (13) 3 1 J R 0 , 2 MAX 2 cosd 1 J M 0 , 4 MAX 2 cosd 3 (14) Que se resolverán para cada caso de la Tabla (1) según los valores de Eq. (6). Por otra parte, Eq. (9) (10) y (11) han de reformularse de tal forma que aparezcan en función de la carga máxima: FA FQ1 J A 01 , 1 FQ2 J A 02 , 2 Q MAX Z sin (15) FR FQ1 J R 01 , 1 FQ2 J R 02 , 2 Q MAX Z cos (16) M d FQ1 J M 01 , 1 FQ2 J M 02 , 2 QMAX Z sin (17) donde: FQ1 1 01 max 01 , 1 , 02 , 2 3 if or then 2 max 02 , 2 2 F 1 max 1 , 1 , 2 , 2 Q 1 1 0 0 max 0 , (18) 3 02 max 01 , 1 , 02 , 2 max 01 , 1 2 1 FQ max 2 , 2 if or then 0 2 max 1 , 1 , 2 , 2 FQ2 1 0 0 c) Superficie de aceptación del rodamiento Para representar gráficamente los puntos FA, FR y M que hacen que la bola más solicitada tenga una deformación permanente según se detalla en [4], la carga máxima debe ser expresada en función de la capacidad de carga estática axial: QMAX C0 a Z sin Por tanto, sustituyendo Eq. (19) en Eq. (15), (16) y (17) se llega a: (19) Capacidad de carga estática generalizada en rodamientos de vuelco de contacto angular de 4 puntos FA F A QMAX Z sin C0 a FR F R tan QMAX Z cos C0 a 7 (20) M d M d QMAX Z sin C0 a que supone un punto en un diagrama tridimensional con ejes FA , FR tan y M d . Tomando diferentes casos C0 a C0 a C0 a de interferencia (A, R, M) según Eq. (6), y resolviendo Eq. (15), (16) y (17) para cada uno de ellos se llega a una nube de puntos que conforma la superficie de aceptación. RESULTADOS Y DISCUSIÓN La dificultad que tiene la representación de la superficie de aceptación reside en que ha de ser mapeada en coordenadas paramétricas (A,R,M); a cada terna de dichos parámetros le corresponde una terna de valores en los ejes ( FA/C0a, FR tan /C0a, (M/d)/C0a), lo cual implica que la superficie sólo puede ser representada mediante una nube de puntos. Se ha desarrollado una aplicación MAPLE para el cálculo de la nube de puntos con diferente nivel de precisión “N” a la hora de mapear la superficie de la siguiente manera: Ai i R i i M i i i N ... N (21) de tal forma que se han esogido todas las combinaciones posibles, dando un total de (2N+1)3 puntos. En la Fig. (4) se representa la nube de puntos para un valor de N=20 y la Fig. (5) muestra una representación renderizada de la misma. La Fig. (6) muestra la intersección de la nube de puntos con los planos coordenados Fig. 4. Nube de puntos de la superficie de aceptación (N=20). La validez teórica del método viene avalada por los valores que toma la superficie en los ejes coordenados. En efecto, tal y como por ejemplo aparece recogido por ejemplo en [7][8] y aplicado a rodamientos de contacto angular de 4 puntos, los valores límite de fuerza axial, radial y momento vienen dados por las siguientes expresiones: FA,max C0 a 2 FR ,max C 0 a 0,4577C 0 a 4.37 d M max C0 a 0.2288C0 a d 4.37 (22) 8 J. Aguirrebeitia et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) Fig. 5. Superficie triangulada y renderizada de la nube de puntos. M d C0 a M d C0 a FR tan C0a FA C0 a FR tan C0a FA C0 a Fig. 6. Intersección de la nube de puntos con los ejes coordenados. Valores que coinciden con los dados por el método desarrollado en este trabajo, tal y como puede observarse en la Fig. (6). En la Fig. (7) se presentan curvas de aceptación en los ejes de fuerza axial fuerza radial, para varios 9 Capacidad de carga estática generalizada en rodamientos de vuelco de contacto angular de 4 puntos valores del momento de vuelco, obtenidas a partir de interpolaciones de las intersecciones de la nube de puntos en planos paralelos. FR tan C0a M d C 0 a 0.00000 0.02288 0.04576 0.4577 0.06864 0.09152 0.11440 0.13728 0.16016 0.18304 0.20592 0.22880 FA C0a 1.0000 Fig. 7. Curvas de aceptación en el plano FA-FR. CONCLUSIONES Y LÍNEAS FUTURAS En este artículo se ha desarrollado un procedimiento para conocer los valores límite de las acciones en rodamientos de vuelco de contacto angular de 4 puntos. Las acciones son una fuerza axial, un momento de vuelco y una fuerza radial perpendicular a dicho momento (que supone el caso más desfavorable). Dichos valores límite se obtienen planteando el equilibrio de fuerzas y momentos en el anillo interior del rodamiento e igualando la carga máxima a aquella que proviene de la capacidad estática de carga axial. Como resultado se obtiene una superficie formada por una nube de puntos en un sistema tridimensional cuyos ejes son la carga axial, la carga radial y el momento de vuelco. Los resultados obtenidos coinciden cuando el modelo desarrollado se particulariza a otros modelos más sencillos que aparecen en la bibliografía. REFERENCIAS [1] J. I. Amasorrain, X. Sagartzazu, J. Damián, Load distribution in a four contact-point slewing bearing. Mechanism and Machine Theory, 38 (2003), 479-496. [2] S. Zupan, I. Prebil, Carrying angle and carrying capacity of a large single row ball bearing as a function of geometry parameters of the Rolling contact and the supporting structure stiffness. Mechanism and Machine Theory, 36 (2001), 1087-1103. [3] A. Jones, Analysis of Stresses and Deflections. New Departure Engineering Data, Bristol, CT, (1946). [4] International Standard ISO 76, Rolling Bearings-Static Load Ratings, third edition, (2006-05-01). [5] H. Sjoväll, The load distribution within ball and Roller bearings under given external radial and axial load. Teknisk Tidsdrift, Mek., h.9, (1933). [6] J. Rumbarger, Thrust bearing with eccentric loads. Mach. Des. (february 15, 1962) [7] T.A. Harris, M.N. Kotzalas, Rolling Bearing Analysis: Essential Concepts of Bearing Technology. Taylor & Francis. CRC Press (2007). [8] T.A. Harris, M.N. Kotzalas, Rolling Bearing Analysis: Advanced Concepts of Bearing Technology. Taylor & Francis. CRC Press (2007).