CONCEPTO DE TRABAJO
Anuncio

CONCEPTO DE TRABAJO
Índice
1. Trabajo de una fuerza sobre una partícula
1.1. Definición de trabajo elemental . . . . . . . . . . . . . . .
1.1.1. Nomenclatura . . . . . . . . . . . . . . . . . . . . .
1.1.2. Propiedades . . . . . . . . . . . . . . . . . . . . . .
1.1.3. Definición de Potencia . . . . . . . . . . . . . . . .
1.2. Definición de trabajo . . . . . . . . . . . . . . . . . . . . .
1.3. Calculo del trabajo: casos de interés . . . . . . . . . . . . .
1.3.1. Caso general . . . . . . . . . . . . . . . . . . . . . .
1.3.2. Caso de fuerza solo función de la posición . . . . .
1.3.3. Caso de fuerza potencial solo función de la posición
1.4. Superficies de nivel de un campo escalar . . . . . . . . . .
1.4.1. Derivada direccional . . . . . . . . . . . . . . . . .
1.5. Cálculo de la función de fuerzas . . . . . . . . . . . . . . .
1.6. Campos no estacionarios . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
2
2
3
3
3
3
3
3
5
5
5
6
2. Trabajo de las fuerzas aplicadas sobre un sistema de partículas
2.1. Generalización del concepto de función de fuerzas . . . . . . . . . . . . . . . . .
7
7
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3. Trabajo de las fuerzas aplicadas sobre un sólido
9
3.1. Propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4. Relatividad del trabajo
11
5. Trabajo de las acciones de contacto
12
1
2
1.
Trabajo de una fuerza sobre una partícula
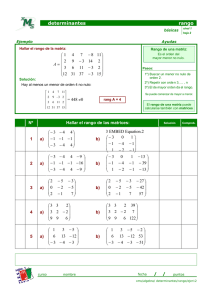
Sea un sistema de referencia cartesiano rectangular O1 x1 y1 z1 y sea una partícula M que
estando sometida a una fuerza F̄ se mueve respecto al sistema anterior describiendo una trayectoria C.
z
Si se considera un sistema de referencia cartesiano
rectangular, el vector de posición de la partícula en un
C
F̄
instante genérico lo podemos representar por:
M
P
θ
r̄ = x~ı + y~ + z~k
(1)
M0
r̄
dr̄
y la fuerza que actúa sobre la misma por:
O
y
P
F̄ = X~ı + Y ~ + Z~k
(2)
M1
1.1.
Definición de trabajo elemental
x
Se define el trabajo elemental como:
(3)
dW = F̄ · dr̄
y se comprueba fácilmente que resulta:
P
(4)
dW = F̄ · dr̄ = |F̄ ||dr̄| cos θ = Xdx + Y dy + Zdz
1.1.1.
Nomenclatura
Signo del trabajo Ángulo θ
+
agudo
obtuso
Tipo de trabajo
motor
resistente
Si el trabajo elemental es nulo se tiene:
F̄ = 0̄
dr̄ = 0̄
dW = 0 ⇔ F̄ · dr̄ = 0 ⇔
ang(F̄ , dr̄) = ± π2
1.1.2.
Propiedades
Como el producto escalar es una forma bilineal, es lineal respecto a sus dos factores:
1. Si la fuerza es la resultante de un sistema de fuerzas:
F̄i (i = 1, . . . , n) | F̄ =
n
X
F̄i
i=1
El trabajo realizado por la fuerza resultante es igual a la suma de los trabajos de las
fuerzas componentes.
n
n
n
X
X
X
dW = F̄ · dr̄ = (
F̄i ) · dr̄ =
(F̄i · dr̄) =
dWi
i=1
i=1
i=1
2. Si el desplazamiento es el resultante de un sistema de desplazamientos:
dr̄j (j = 1, . . . , m) | dr̄ =
m
X
j=1
dr̄j
3
El trabajo realizado en el desplazamiento resultante es igual a la suma de trabajos en los
desplazamientos componentes.
dW = F̄ · dr̄ = F̄ ·
m
X
dr̄j =
j=1
1.1.3.
m
m
X
X
(F̄ · dr̄j ) =
dWi
j=1
j=1
Definición de Potencia
Si el desplazamiento elemental se ha realizado en un tiempo dt se define la potencia como:
dW
dr̄
P =
= F̄ ·
= F̄ · v̄
dt
dt
1.2.
Definición de trabajo
Se define el trabajo de una fuerza sobre la partícula como la circulación de la fuerza sobre
el arco de trayectoria recorrido.
Z M1
W =
F̄ · dr̄
C
1.3.
M0
Calculo del trabajo: casos de interés
1.3.1.
Caso general
Este caso se presenta cuando la dependencia de la fuerza es del tipo:
F̄ = F̄ (r̄, v̄, t)
Para el cálculo del trabajo en este caso se necesita conocer el movimiento completo de la partícula r̄ = r̄(t), por derivación podemos obtener la velocidad (v̄ = v̄(t)) y el desplazamiento
elemental (dr̄ = v̄(t)dt), con lo que el trabajo resulta:
Z M1
Z t1
Z t1
W =
F̄ · dr̄ =
F̄ (r̄(t), v̄(t), t) · v̄(t) dt =
P (t)dt
(5)
{z
}
M0
t0 |
t0
C
1.3.2.
P (t)
Caso de fuerza solo función de la posición
Este caso se presenta cuando la dependencia de la fuerza es del tipo:
F̄ = F̄ (r̄)
Para el cálculo del trabajo en este caso se necesita conocer únicamente la trayectoria de la
partícula r̄ = r̄(u), se puede obtener el desplazamiento elemental (dr̄ = dr̄(u)
du), con lo que el
du
trabajo resulta:
Z M1
Z u1
Z u1
dr̄(u)
W =
F̄ · dr̄ =
F̄ (r̄(u)) ·
du =
Ψ(u)du
(6)
du }
M0
u0 |
u0
{z
C
Ψ(u)
1.3.3.
Caso de fuerza potencial solo función de la posición
Este caso se presenta cuando la fuerza deriva de una función de fuerzas U de la siguiente
forma: ∃U(r̄) | F̄ (r̄) = ∇U(r̄) (el gradiente se define mediante: dφ = ∇φ · dr̄).
p
El operador nabla del gradiente se expresa en cartesianas como ∇ = ∂ ~ı + ∂ ~ + ∂ ~k.
∂x
∂y
∂z
4
Propiedades
• El trabajo es independiente del camino recorrido y solo depende de las posiciones inicial
y final:
∂U
∂U
P ∂U
dW = F̄ · dr̄ = ∇U(r̄) · dr̄ = dU (=
dx +
dy +
dz)
∂x
∂y
∂z
Z M1
Z M1
Z M1
W =
F̄ · dr̄ =
∇U(r̄) · dr̄ =
dU = U1 − U0
C
M0
C
M0
M0
• Si la función F̄ ∈ C(R3 , R3 ) y el trabajo es independiente del camino recorrido, entonces
existe función de fuerzas.
Z M
Z M
dU = dW ⇒ U(x, y, z) =
F̄ · dr̄ =
(Xdx + Y dy + Zdz)
M0
M0
derivando parcialmente con respecto a x se tiene:
∂U
U(x + h, y, z) − U(x, y, z)
= lı́m
=
h→0
∂x
h
R (x+h,y,z)
(Xdx + Y dy + Zdz) (∗)
(x,y,z)
= lı́m
=
h→0
h
R (x+h,y,z)
X(x, y, z)dx (∗∗)
(x,y,z)
=
= lı́m
h→0
h
hX(x + γh, y, z)
= lı́m
= X(x, y, z)
h→0
h
z
M0 (x, y, z)
h
O
∃γ∈[0,1]
M1 (x + h, y, z)
(∗) Por la independencia del camino (y = cte, z = cte)
x
(∗∗) Teorema de la media del calculo integral
y análogamente se demostraría que:
∂U
= Y (x, y, z)
∂y
∂U
= Z(x, y, z)
∂z
con lo que resulta:
∂U
∂U
∂U ~
k = ∇U
F̄ = X~ı + Y ~ + Z~k =
~ı +
~ +
∂x
∂y
∂x
Teorema La condición necesaria y suficiente para que exista función de fuerzas es que el
rotacional del campo de fuerzas sea nulo.
∃U(x, y, z) ∈ C 2 (R3 , R)
} | F̄ = ∇U
∃F̄ (x, y, z) ∈ C 1 (R3 , R3 )
⇔
∇ ∧ F̄ = 0̄
Demostración de ⇒
F̄ = ∇U
~ı
∂
∇ ∧ F̄ = ∂x
X
~
∂
∂y
Y
~k ∂Z
∂Y
∂X
∂Z
∂Y
∂X ~
∂ =(
−
)~ı + (
−
)~ + (
−
)k
∂z ∂y
∂z
∂z
∂x
∂x
∂y
Z
y
5
La primera componente resulta:
∂Z
∂Y
∂2U
∂ 2 U (∗)
−
=
−
=0
∂y
∂z
∂z∂y ∂y∂z
(∗)
Teorema de Schwarz
Ω
y análogamente se anulan las otras dos componentes,
con lo que se demuestra la primera parte.
M1
Demostración de ⇐ Elegimos una curva cerrada arbitraria C contenida en la región Ω en la que se
anula el rotacional del campo. Aplicando el teorema
de Stokes para una superficie arbitraria Σ ⊂ Ω que se
apoya en la curva C:
Z
ZZ
ZZ
(Stokes)
O F̄ · dr̄ =
(∇ ∧ F̄ ) · dS̄ =
(∇ ∧ F̄ ) · ~ndσ = 0
Σ
C
Σ
C1
C
M2
C2
Σ
Si elegimos dos puntos distintos y arbitrarios M1 y M2 de la curva C, la curva queda dividida
en dos tramos: C1 y C2 . De la igualdad anterior se sigue:
Z
Z M2
Z M1
Z M2
Z M2
0 = O F̄ · dr̄ =
F̄ · dr̄ +
F̄ · dr̄ ⇒
F̄ · dr̄ =
F̄ · dr̄
C
M1
C1
M2
C2
M1
C1
M1
C2
tanto C como M1 y M2 son completamente arbitrarios demostramos que el trabajo es independiente del camino y, por el teorema anterior, el campo deriva de una función de fuerzas.
1.4.
Superficies de nivel de un campo escalar
Se define superficie de nivel o equipotencial del campo escalar U asociada al valor constante
K como:
SK = {r̄ ∈ R3 | U(r̄) = K}
1.4.1.
Derivada direccional
dU
= ∇U · ~u (= F̄ · ~u = Fu~ )
d~u
El valor máximo de la derivada direccional se logra para θ(~u) = arc cos(~u ·
para ~u en la dirección y sentido del gradiente.
Ejemplos: Atracción/repulsión central, axial o planar.
1.5.
∇U
)
|∇U |
= 0, es decir,
Cálculo de la función de fuerzas
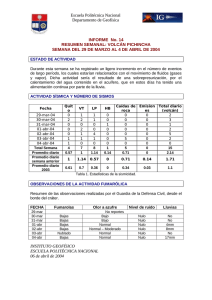
Para este desarrollo usaremos coordenadas generalizadas,
aunque luego veremos que no es obligatorio. Sea el campo de
fuerzas potencial:
F̄ (x, y, z) = X(x, y, z)~ı + Y (x, y, z)~ + Z(x, y, z)~k
z
(x, y, z)
(a, b, c)
Considerando la independencia del camino para el calculo del
trabajo usamos una línea quebrada formada por tres segmentos
rectilíneos que se eligen paralelos a los ejes coordenados, para
conseguir que en cada uno de ellos únicamente varíe una coorde-
1
O
(x, b, c)
x
3
2
y
(x, y, c)
6
nada:
1 : y = b, z = c, ξ ∈ (a, x)
2 : x = x, z = c, η ∈ (b, y)
3 : x = x, y = y, ζ ∈ (c, z)
Por ejemplo, si consideramos el trabajo desde un punto M0 (a, b, c) el origen a un punto genérico
M(x, y, z) se tiene:
Z x
Z y
Z z
U(x, y, z) =
X(ξ, b, c)dξ +
Y (x, η, c)dη +
Z(x, y, ζ)dζ
a
b
c
Si eligiéramos otro sistema de coordenadas generalizadas el procedimiento sería completamente análogo, usando caminos donde sólo varíe una coordenada generalizada.
El punto inicial de la integración es un Punto en el que el valor de la función de fuerzas
(o del potencial) es nulo, por eso se denomina origen o nivel nulo de función de fuerzas (o
de potenciales). Ahora pasamos a describir cómo cambia la función de fuerzas, si se cambia el
origen de potenciales:
Z M (x,y,z)
U0 (x, y, z) =
F̄ · dr̄
M0
M (x,y,z)
U1 (x, y, z) =
Z
M1
∇U1 = ∇U0
F̄ · dr̄ =
Z
|
M0
M1
F̄ · dr̄ +
{z }
Z
M (x,y,z)
F̄ · dr̄ = CT E + U0 (x, y, z)
M0
CT E
La función de fuerzas queda definida salvo una constante aditiva. El origen de potenciales
puede fijarse arbitrariamente a conveniencia dentro de unas ciertas limitaciones (solo en un
punto con valor finito de la función).
1.6.
Campos no estacionarios
En algunas ocasiones se da la siguiente condición en campos no estacionarios:
∃ U, F̄ | F̄ (x, y, z, t) = ∇U(x, y, z, t)
En estas circunstancias se tiene:
∂U
∂U
∂U
∂U
∂U
∂U
∂U
dx +
dy +
dz 6= dU =
dx +
dy +
dz +
dt
dW = F̄ · dr̄ =
∂x
∂y
∂z
∂x
∂y
∂z
∂t
7
2.
Trabajo de las fuerzas aplicadas sobre un sistema de
partículas
Se define el trabajo como una magnitud aditiva:
Z
N
(1) X i
i (2)
dW =
F̄ · dr̄ =
F̄ · dr̄
S
i=1
donde la igualdad (1) se usa en el modelo de masas puntuales y la (2) en el de masas distribuidas.
2.1.
Generalización del concepto de función de fuerzas
Se dice que existe función de fuerzas asociada a un sistema de partículas cuando
∃U(r̄ i ) = U(r̄ 1 , ..., r̄ N ) | dW = dU
Cuando ocurre esto, se satisfacen la siguientes relaciones:
∂U
∂U
∂U
P
F̄ i = ∇i U (i = 1, . . . , N) → X i = i , Y i = i , Z i = i
∂x
∂y
∂z
y el trabajo entre los estados A y B se calcula como:
Z BX
Z BX
Z BX
Z B
N
N
N
i
i
i
i
i
W =
F̄ · dr̄ =
∇ U · dr̄ =
dU =
dU = UB − UA = ∆U
A
A
i=1
A
i=1
A
i=1
Ejemplos:
• Dos partículas (i, j) con la ley de acción-reacción en
su formulación fuerte:
z
Geometría : r̄ ij = r̄ j − r̄ i = r ij ~u ij
i
F̄ ji
Modelo de fuerzas : F̄ ij = F ij ~u ij = −F̄ ji
~u ij
r̄ ij
concepto
Vector de posición
Fuerza
ij
primer índice
origen
causa
j
ji
i
segundo índice
extremo
efecto
ij
j
r̄ i
r̄ j
O
F̄ ij
y
i
dW = F̄ · dr̄ + F̄ · dr̄ = F̄ · (dr̄ − dr̄ ) =
= F̄ ij · dr̄ ij = F ij ~u ij · (dr ij ~u ij + r ij d~u ij ) =
= F ij dr ij
Si F ij = F (r ij ) (fuerza función de la distancia) entonces:
Z
ij
ij
dW = F (r )dr = dU ⇒ U = F (r ij ) dr ij + C
x
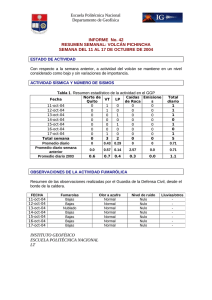
• Varilla homogénea de masa m y longitud l en un
plano sometida a una repulsión de un eje del mismo
proporcional a la masa y a la distancia:
y
F̄ δm
ξ, η, φ coords. generalizadas de la varilla en el plano
s
s longitud de arco (para discretizar la masa)
φ
m
ds
l
= η + s sin φ
j
δm
G
η
δm = λds =
y δm
x
O
ξ
8
Si la repulsión es del eje Ox, se modeliza mediante:
F̄ δm = ky δm δm ~
k
dU δm = F̄ δm · dr̄ = k y δm dy δm δm ⇒ U δm = (y δm )2 δm
2
Z
Z l/2
Z
km
km 2 l2
k
U=
U δm =
(y δm )2 δm =
(η + s sin φ)2 ds =
[η +
sin2 φ]
2
2l −l/2
2
12
S
Teorema La condición necesaria y suficiente para que exista función de fuerzas para un sistema
de partículas es que el trabajo elemental de las fuerzas aplicadas al sistema
dU = dW =
N
X
i
i
F̄ · dr̄ =
i=1
n
X
Gj (q1 , . . . , qn ) dqj
j=1
sea una forma diferencial exacta en las coordenadas generalizadas qj (j = 1, . . . , n), es decir, se
cumpla la igualdad de derivadas parciales cruzadas:
∂Gj
∂Gk
=
(j, k = 1, . . . , n; j < k)
∂qk
∂qj
Aplicación al ejemplo de la varilla:
m
dU δm = F̄ δm · dr̄ = k y δm dy δm δm = k(η + s sin φ)(dη + s cos φdφ) ds
l
Z
Z l/2
km
(η + s sin φ)(dη + s cos φdφ)ds =
dU =
dU δm =
l −l/2
S
l2
sin φ cos φ dφ]
12
Existe función de fuerzas, ya que:
= km[ηdη +
2
∂( kml
sin φ cos φ)
∂Gξ
∂Gη
∂Gξ
∂Gφ
∂Gη
∂Gφ
∂(kmη)
12
=
=
=
= 0;
=
=0=
=
∂η
∂ξ
∂φ
∂ξ
∂φ
∂η
∂η
∂φ
y vale
U(η, φ) =
km 2 l2
[η +
sin2 φ]
2
12
9
3.
Trabajo de las fuerzas aplicadas sobre un sólido
Sean i y j los índices asociados a dos partículas de
un sólido. Las fuerzas sobre las partículas se dividen en
fuerzas interiores y exteriores:
z
F̄
F̄ i = F̄Ei + F̄Ii
F̄Ei
ji
F̄ i
i
Si las fuerzas interiores responden al modelo de
acción-reacción en su formulación fuerte se tiene:
~u ij
r̄ i
F̄Iij = −F̄Ij i = F ij ~u ij
F̄Ii
r̄ ij
j
r̄ j
F̄ ij
y
O
y además el trabajo de las fuerzas internas sobre el par
de partículas i, j se calcula como:
dW ij = F ij dr ij
La resultante de las fuerzas interiores sobre una par- x
tícula es:
N
N
X
X
i
ji
ji ∗
∗
F̄I =
F̄ =
F̄ δij , δij = 1 − δij : complemento a uno de los deltas de Kronecker
j=1
j=1
j6=i
Y las fuerzas interiores constituyen un sistema nulo de vectores:
R̄I =
N
X
F̄Ii =
i=1
i=1
(M̄O )I =
N X
N
X
N
X
OM i
N
X
(OM i
∧
j=1
F̄Ii
i<j
N X
N
X
=
i=1
∧ F̄
ij
i j j i
F̄ + F̄ ) = 0̄
(
i,j=1
j6=i
i=1
=
N
X
(∗)
F̄ j i =
OM i
∧ F̄
j i (∗)
=
N
X
j=1
i,j=1
j6=i
i<j
i
j ij
+
r̄ ∧ F̄
+
OM i
ji
(OM j ∧ F̄ i j + OM i ∧ F̄ j i ) =
∧ F̄ ) =
N
X
i,j=1
i,j=1
i<j
i<j
i j j i
OM i ∧ (
F̄ + F̄ ) = 0̄
El trabajo total sobre un sistema se calcula por aditividad:
dW =
N
X
(F̄Ei
i
· dr̄ +
F̄Ii
i
· dr̄ ) =
i=1
N
X
F̄Ei
i
· dr̄ +
i=1
N
X
F̄Ii · dr̄ i = dWE + dWI
i=1
Para el trabajo de las fuerzas interiores resulta que:
dWI =
N
X
i=1
F̄Ii
N X
N
N
N
X
X
X
ji
i (∗)
ji
i
ij
j
· dr̄ =
(
F̄ · dr̄ ) =
(F̄ · dr̄ + F̄ · dr̄ ) =
F ij dr ij
i
i=1
j=1
i,j=1
i,j=1
j6=i
i<j
i<j
(*) agrupando por parejas y contabilizando cada pareja una sola vez
Como en los sólidos dr ij = 0, se tiene que las fuerzas interiores no realizan trabajo.
Para calcular el trabajo de las fuerzas exteriores empezamos por utilizar el campo de velocidades de un sólido:
i
v̄ i = v̄ M = v̄ O + ω̄ ∧ OM i
10
por lo tanto, se tiene:
dW = dWE =
N
X
F̄Ei · dr̄ i =
i=1
P =
=
N
X
i=1
N
X
F̄Ei · v̄ i dt
i=1
F̄Ei · (v̄ O + ω̄ ∧ OM i ) =
(F̄Ei
i=1
N
X
=(
i=1
N
X
=(
N
X
O
· v̄ ) +
F̄Ei ) · v̄ O +
N
X
F̄Ei · (ω̄ ∧ OM i ) =
i=1
N
X
ω̄ · (OM i ∧ F̄Ei ) =
i=1
F̄Ei ) ·v̄ O
+ ω̄ · (
| i=1{z }
R̄
= (R̄ · v̄ O + M̄O · ω̄)
N
X
| i=1
OM i ∧ F̄Ei ) =
{z
M̄O
}
P = R̄ · v̄ O + M̄O · ω̄
3.1.
Propiedades
Para un sólido se satisface que:
Sistemas nulos producen trabajos|potencias nulos (tendrá aplicación teórica en la relatividad del trabajo)
Sistemas equivalentes producen trabajos|potencias equivalentes (tendrá aplicación práctica para calcular el trabajo sobre un sólido)
11
4.
Relatividad del trabajo
El movimiento es esencialmente relativo y, por tanto, los desplazamientos dependen del referente del movimiento. Como dr̄ i = v̄ i dt los desplazamientos se componen como las velocidades:
z z1
y
r̄
i
i
i
v̄X1
= v̄X0
+ v̄01
i
dWX1
i
i X
i
r̄
′i
0
i
= F̄ · dr̄ = F̄
i
= F̄ i · v̄X0
dt +
i
i
i
i
· v̄X1
dt = F̄ i · (v̄X0
+ v̄01
)dt
i
i
i
i
F̄ · v̄01 dt = dWX0 + dW01
=
~k1
O1
~
~k
~ı
~1
O
1
y1
~ı1
El movimiento de arrastre es el movimiento de un sólido, luego el trabajo de arrastre goza de las propiedades x1
x
del trabajo sobre un sólido.
Por ejemplo, si el sistema de fuerzas que actúan sobre un sistema material es nulo, el trabajo
de arrastre es nulo:
N
X
i
dW01 =
dW01
=0
i=1
y, por lo tanto, se tiene:
dWX1 =
N
X
i=1
i
dWX1
=
N
X
i
dWX0
= dWX0
i=1
lo que significa que el trabajo de un sistema de fuerzas nulo sobre un sistema material es independiente del sistema de referencia donde se contabilicen los desplazamientos (tendrá aplicación
teórica en el trabajo de las acciones de contacto entre sólidos).
12
5.
Trabajo de las acciones de contacto
Las acciones de contacto entre sólidos, reducidas al
punto de contacto M y proyectadas sobre el plano tangente común en M y la normal, son:
p
r
Acciones de S0 sobre S2 (azul): F̄R , N̄, M̄M
, M̄M
p
r
Acciones de S2 sobre S0 (rojo): −F̄R , −N̄ , −M̄M
, −M̄M
Se pretende responder a dos cuestiones:
N̄
M̄M
F̄
M̄ p
−F̄R
M̄ r
1. ¿Cuanto vale el trabajo total?
2. ¿Cuanto vale el trabajo sobre uno de los sólidos?
M
1) El sistema de fuerzas total es un sistema nulo, luego
el trabajo que realiza es independiente del sistema de
referencia donde se calcule. Vamos a usar el sistema S0
para referir los vectores. En dicho sistema de referencia
las acciones sobre S0 no realizan trabajo. La potencia
que desarrolla el resto es:
−F̄
dW
p
M
r
= (F̄R + N̄) · v̄20
+ (M̄M
+ M̄M
) · ω̄20
dt
Teniendo en cuenta que:
~
v̄ M ⊥ N,
ω̄20 = ω̄ r + ω̄ p , ω̄ r ⊥ M̄ p , ω̄ p ⊥ M̄ r
20
20
20
20
M
20
−M̄ r F̄R
−M̄ p
−M̄M
-N̄
M
resulta:
dW
p
p
M
r
r
= F̄R · v̄20
+ M̄M
· ω̄20
+ M̄M
· ω̄20
dt
En los modelos de contacto en un punto que normalmente se usan se tiene:
p
r
M̄M
= M̄M
= 0̄,
F̄R = −f |N̄ |
M
v̄20
M
|v̄20
|
y de esto resulta:
dW
v̄ M
M
M
= −f |N̄| 20
· v̄20
= −f |N̄||v̄20
|
M
dt
|v̄20 |
Conclusiones:
Trabajo/potencia total no positivo/a (nulo/a o negativo/a).
Si no hay rozamiento (f = 0), trabajo/potencia nulo/a
M
Si no hay deslizamiento (v̄20
= 0̄), trabajo/potencia nulo/a
Esto es fácilmente generalizable si los momentos de contacto no son nulos:
p
ω̄ r
ω̄20
p
r
M̄M
= −δ|N̄ | 20
M̄
=
−ǫ|
N̄
|
p
M
r
|ω̄20
|
|ω̄20
|
con lo que resulta:
dW
p
M
r
= −|N̄|(f |v̄20
| + δ|ω̄20
| + ǫ|ω̄20
|)
dt
que igualmente es una potencia no positiva.
2) No puede decirse nada con carácter general. Hay que aplicar la fórmula para cada sólido.
M
P21 = (F̄R + N̄ ) · v̄21
+ M̄M · ω̄21