Algebra Lineal - Parcial 1
Anuncio

Álgebra Lineal - Parcial 1
G. Padilla
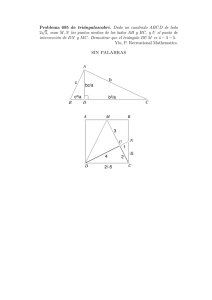
(1) Dados dos vectores u, v ∈ R3 no nulos; muestra que
(a) uv = |u||v| cos(φ) donde φ es el ángulo que separa a u, v. [Resp.] [0.5pt]
Por la regla trigonométrica del coseno, sabemos que en cualquier triángulo
2
2
2
de lados a, b, c; se satisface que c = a + b − 2ab cos(φ) donde φ es el
ángulo que separa a los lados a, b. Si u, v ∈ R3 entonces, por la ley del
paralelogramo; los vectores u, v, w = (u − v) están en el mismo plano y sus
puntos finales forman un triángulo. Aplicando la ley del coseno;
2
2
2
|u − v| = |u| + |v| − 2|u| · |v| cos(φ)
Aplicando las propiedades del producto punto
2
2
2
|u − v| = (u − v) · (u − v) = u · u + v · v − 2u · v = |u| + |v| − 2u · v
Comparando ambas igualdades obtenemos el resultado.
(b) El vector que se obtiene al proyectar u en la dirección de v es w = λv donde
λ = uv
vv . [Resp.] [0.5pt] Esta pregunta se puede resolver de dos formas.
Manera #1: Sea w = λv el vector que se obtiene al proyectar u en la dirección de v. Entonces u, w, (w − u) conforman un triángulo rectángulo
cuyo ángulo recto es formado precisamente por (w − u) y w. Por las propiedades
del producto punto
2
0 = w · (w − u) = (ww − uw) = λ (vv) − λ(uv)
Simplificando la igualdad y despejando λ se deduce que λ =
uv
vv .
Manera #2: Sea w = λv el vector que se obtiene al proyectar u en la dirección de v. Si l es la recta tv, con t ∈ R; entonces w es el punto de la
2
recta l para el cual se minimiza el cuadrado de la distancia g(t) = |tv − u| .
Luego g0 (λ) = 0. Calculando directamente
2
2
g(t) = |tv − u| = (tv − u) · (tv − u) = t (vv) − 2t(uv) + (uu)
Derivando g0 (t) = 2t(vv) − 2(uv). Igualando a cero y evaluando en λ, se
obtiene que λ(vv) − (uv) = 0. Al despejar λ se obtiene el resultado.
(2) Dadas las matrices
A=
3
0 −7
0
0
0
5 −1
−1 −2
0
1
2 −1
1
0
1
0
B=
3
1 −5
T
Calcula B( A − C ). [Resp.] Procedemos por pasos:
1
5
−2
C=
0
2
0 −1
1
1
1
0
1 −3
2
ALP2
5 −2 0
2
3
0 −7
0
1 1
1
0
5 −1 − 0
= 0
−1
1 0 −3
−1 −2
0
1
A−C
T
−2
2 −7 −2
4 −2
= 0 −1
0 −3
0
4
[0.5pt]
Multiplicando
2 −1
1
−2
2 −7 −2
T
1
0 · 0 −1
4 −2
B( A − C ) = 0
3
1 −5
0 −3
0
4
−4 + 0 + 0 4 + 1 − 3 −14 − 4 + 0 −4 + 2 + 4
0+4+0
0−2+0
= 0+0+0 0−1+0
−6 + 0 + 0 6 − 1 + 15 −21 + 4 + 0 −6 − 2 − 20
−4
2 −18
2
4 −2
= 0 −1
−6 20 −17 −28
[0.5pt]
(3) Dados los puntos a = (0, 1, 1); b = (1, 1, −3); c = (2, 1, 0); d = (3, 0, 2);
e = (1, 5, 5); f = (1, −1, 2); halla la intersección π1 ∩ π2 entre el plano π1 que
contiene a a, b, c y el plano π2 que contiene a d, e, f . [Resp.] Procedemos por
pasos.
Ecuaciones de los planos: [1pt] Para los planos π1 , π2 elegimos respectivamente
los puntos de apoyo a, d y los vectores directores (ortogonales)
i j
k
1
0
−
4
= (0, −7, 0)
u = (b − a) × (c − a) = 2 0 −1 i
j k 5 3 = (3, −6, 12)
v = (e − d) × ( f − d) = −2
−2 −1 0 De este modo, los planos π1 , π2 determinan las ecuaciones vectoriales u( P −
a) = 0 y v( P − d) = 0 donde P = ( x, y, z) es un punto variable a determinar. Al
ALP2
3
desarrollar estas ecuaciones obtenemos el sistema de ecuaciones lineales
(
π1 :
−7y
= −7
π2 : 3x −6y +12z =
33
Eliminación de Gauss-Jordan: [1pt] La intersección S = π1 ∩ π2 es el conjunto
de soluciones del sistema anterior; que resolvemos con el método de eliminación de Gauss-Jordan
0 −7 0 −7
3 −6 12 33
1 −2 4 11
∼
∼
3 −6 12 33
0 −7 0 −7
0
1 0 1
∼
1 0 4 13
0 1 0
1
Conjunto solución: [1pt] El sistema simplificado es x + 4z = 13, y = 1. Si
tomamos como parámetro libre a z = t ∈ R entonces x = 13 − 4t, y = 1. Los
puntos que satisfacen estas dos igualdades son de la forma
S{(13 − 4t, 1, t) : t ∈ R }
que corresponden a la recta de vector director w = (−4, 0, 1) y punto de apoyo
P0 = (13, 1, 0).