K 1s )]s(G[)s(G + ν = = 1s 1 )s(F + α = )1s(K 1s )s(G)s(F)s(Q + α + ν
Anuncio
]s(G[)s(G + ν = = 1s 1 )s(F + α = )1s(K 1s )s(G)s(F)s(Q + α + ν")
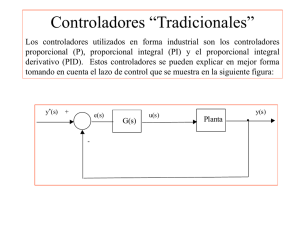
15.3 Síntesis de PID usando la parametrización Modelos de primer orden Ko K o , νo 0 ν os 1 Como no hay ceros inestables, el modelo es invertible exactamente, luego: s1 G oi (s) [G o (s)] 1 o Ko Para que Q(s) sea bipropio; FQ(s) debe tener grado relativo 1, por ejemplo: 1 FQ (s) s 1 Por lo tanto: os 1 Q(s) FQ (s)G oi (s) K o (s 1) Y el controlador es: Consideremos el modelo G o (s) C(s) s1 Q(s) 1 o o 1 Q(s)G o (s) K o s K o K o s Que resulta ser un PI con: KP o K o KI 1 K o Luego tenemos que: To (s) Q(s)G o (s) FQ (s)G oi (s)G o (s) FQ (s) 1 s 1 Donde es el parámetro a sintonizar. Escogiendo pequeño hacemos el lazo más rápido. Con este controlador, las perturbaciones son rechazadas por la función de sensibilidad nominal: s So (s) 1 To (s) 1 FQ (s) s 1 Valores pequeños para rechaza la perturbación de salida más rápido que con valores grandes de . También no se puede escoger arbitrariamente pequeño debido a consideraciones de limitaciones en el actuador. Sistemas con retardos temporales. Consideremos que el modelo nominal de una planta con retardo es: G o (s) e s G o (s) Donde G o (s) es la función de transferencia racional del sistema. La sensibilidad nominal complementaria es: sτ To (s) e G o (s)Q(s) Luego Q(s) se debe diseñar considerando la parte racional del modelo, G o (s) , ya que el retardo no se puede invertir. Luego se necesita una inversa aproximada de G o (s) (estable, causal y propia). Si usamos el esquema realimentado para generar una inversa estable, considerando que: Q(s) C(s) 1 C(s)G o (s) Cuando C( jw ) es grande, entonces Q( jw) [G o ( jw)]1 Esto lleva al siguiente esquema: Di(s) R(s) + U(s) C(s) Do(s) + + + Planta Y(s) + Dm(s) + (e s 1)G o (s) + Ym(s) + - Es la forma tradicional del controlador de Smith. En el caso de considerar la configuración usando la parametrización Q(s), tenemos la figura que se muestra a continuación que es equivalente al controlador de Smith. Di(s) R(s) + U(s) Q(s) Do(s) + + + Y(s) + Planta Dm(s) + Ym(s) + - s e G o (s ) Forma Q(s) del controlador de Smith Ejemplo: Considere una planta con el modelo nominal dado por: G (s ) e s 2s 1 Diseñar un controlador que permita un buen seguimiento de la referencia en un rango [0;1][rad/s]. Desarrollo: Usando la parte racional de Go(s) tenemos que: Q(s) FQ (s)G oi (s) ( 2s 1) (s 2 1,3s 1) Lo cual da: s T(s) Q(s)G(s) FQ (s)G (s)G o (s) i o + e (s 2 1,3s 1)