15.4 Polos indeseables en lazo cerrado El siguiente Lema resume
Anuncio

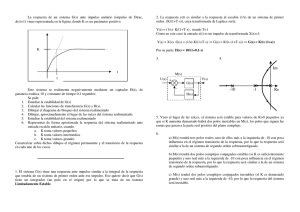
15.4 Polos indeseables en lazo cerrado En la práctica se hace distinción entre los polos estables y los no deseables. Por ejemplo, un par resonante altamente amortiguado podrían ser estables pero probablemente no deseables. Podemos decir que la planta en lazo abierto contiene algunos polos indeseables (incluyendo los inestables). La sola forma de removerlos desde la sensibilidad complementaria es escogiendo un Q(s) que contenga estos polos como ceros. Esto resulta en una cancelación de estos polos en el producto Q(s)Go(s) y por lo tanto de So(s) y To(s). Vemos que los polos cancelados podrían aparecer como polos de la sensibilidad nominal de entrada Sio(s), dependiendo de los ceros de (1- Q(s)Go(s)). Es decir, los ceros de So(s). Para eliminar estos polos en Sio(s) es necesario asegurar que los polos indeseados sean ceros de So(s). El siguiente Lema resume las observaciones anteriores: Lema 4. Considere un lazo de control realimentado nominal con un grado de libertad y asuma que Go(s) contiene polos en lazo abierto no deseables (inclusive inestables). Entonces tenemos lo siguiente: a) Cada una de las funciones de sensibilidad To(s), So(s), Sio(s) y Suo(s) no tendrán polos indeseables si y solo si el controlador se escribe como: Q(s ) (*) C(s ) = 1 − Q(s )G o (s ) Donde Q(s) satisface las siguientes condiciones: 1) Q(s) es propio, estable y tiene sólo polos deseables. 2) Los polos indeseables de Go(s) son ceros de Q(s) teniendo al menos la misma multiplicidad que en Go(s). 3) Los polos indeseables de Go(s) son ceros de (1-Q(s)Go(s)) teniendo al menos la misma multiplicidad que en Go(s). b) Cuando las condiciones (2) y (3) son satisfechas entonces todas las cancelaciones ceros-polos inestables en C(s) inducidas por (*) deberán ser realizadas analíticamente, antes de la implementación. 15.5 Caso lazo abierto inestable. C(s) se puede parametrizar para satisfacer el Lema 4 automáticamente considerando el siguiente Lema: Lema 5. Considerar un lazo de control con un grado de libertad para la planta con modelo nominal Go(s) = Bo(s) / Ao(s). Supongamos que Ao(s) y Bo(s) son polinomios coprimos y que Go(s) podría contener polos no deseables (incluyendo polos inestables). Entonces el lazo cerrado nominal será internamente estable y todas las funciones de sensibilidad contendrán sólo polos deseables si y sólo si es parametrizado por: A (s ) P(s ) + Q u (s ) o E(s ) P(s ) + Q u (s )A o (s ) E(s ) C(s ) = = B o (s ) L(s ) − Q u (s )B o (s ) L( s ) − Q u (s ) E(s ) E(s ) Donde: a) Qu(s) es una función de transferencia propia que tiene polos deseables, y b) P(s) y L(s) son polinomios que satisfacen la siguiente ecuación de asignación de polos: A o (s )L(s ) + B o (s )P(s ) = E(s )F(s ) Donde E(s) y F(s) son polinomios de grado aceptable que tienen ceros en la región deseable del plano complejo sino de otra manera son arbitrarios. Los diagramas del controlador generalizado son: R(s) E(s) + - P(s ) + E( s ) U(s) E( s ) + Planta Y(s) L(s ) Qu(s) Ao ( s ) + Bo ( s ) + E(s) E( s ) P(s) L(s ) R(s) E(s) + - U(s) Ao ( s ) L(s) Bo (s ) L (s) Qu(s) + + + + Planta Y(s) Ejemplo: Considerar el modelo nominal dado por: G (s ) 5 (s − 1)(s + 5) Suponga que el ruido de medición limita la banda del lazo cerrado a w = 10[rad/s]. Determine un controlador usando el método de parametrización de Youla.