Ciclo, periodo, fase y transmisión de movimiento. Cuando las partes
Anuncio

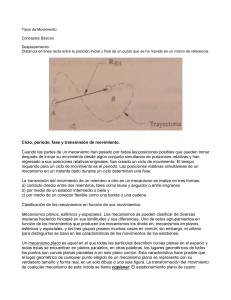
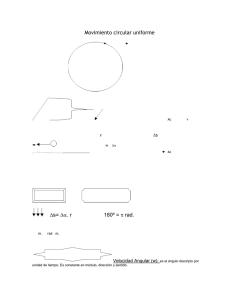
Tipos de Movimiento Conceptos Básicos Desplazamiento. Distancia en línea recta entre la posición inicial y final de un punto que se ha movido en un marco de referencia. Ciclo, periodo, fase y transmisión de movimiento. Cuando las partes de un mecanismo han pasado por todas las posiciones posibles que pueden tomar después de iniciar su movimiento desde algún conjunto simultaneo de posiciones relativas y han regresado a sus posiciones relativas originales, han creado un ciclo de movimiento. El tiempo requerido para un ciclo de movimiento es el periodo. Las posiciones relativas simultáneas de un mecanismo en un instante dado durante un ciclo determinan una fase. La transmisión del movimiento de un miembro a otro en un mecanismo se realiza en tres formas: a) contacto directo entre dos miembros, tales como levas y seguidor o entre engranes b) por medio de un eslabón intermedio o biela y c) por medio de un conector flexible como una banda o una cadena. Clasificación de los mecanismos en función de sus movimientos. Mecanismos planos, esféricos y espaciales. Los mecanismos se pueden clasificar de diversas maneras haciendo hincapié en sus similitudes y sus diferencias. Uno de estos agrupamientos en función de los movimientos que producen los mecanismos los divide en: mecanismos en planos, esféricos y espaciales; y los tres grupos poseen muchas cosas en común; sin embargo, el criterio para distinguirlos se basa en las características de los movimientos de los eslabones. Un mecanismo plano es aquel en el que todas las partículas describen curvas planas en el espacio y todas estas se encuentran en planos paralelos; en otras palabras, los lugares geométricos de todos los puntos son curvas planas paralelas a un solo plano común. Esta característica hace posible que el lugar geométrico de cualquier punto elegido de un mecanismo plano se represente con su verdadero tamaño y forma real, en un solo dibujo o una sola figura. La transformación del movimiento de cualquier mecanismo de esta índole se llama coplanar. El eslabonamiento plano de cuatro barras, y el mecanismo de corredera-manivela son ejemplos muy conocidos de mecanismos planos. La vasta mayoría de mecanismos en uso hoy en día son del tipo plano. Los mecanismos planos que utilizan sólo pares inferiores se conocen con el nombre de eslabonamientos planos y sólo pueden incluir revolutas y pares prismáticos. Mecanismo esférico es aquel en el que cada eslabón tiene algún punto que se mantiene estacionario conforme el eslabonamiento se mueve, y en el que los puntos estacionarios de todos los eslabones están en una ubicación común; en otras palabras, el lugar geométrico de cada punto es una curva contenida dentro de una superficie esférica y las superficies esféricas definidas por varios puntos arbitrariamente elegidos son concéntricas. Por ende, los movimientos de todas las partículas se pueden describir por completo mediante sus proyecciones radiales, o "sombras", proyectadas sobre la superficie de una esfera, con un centro seleccionado en forma apropiada. La articulación universal de Hooke es quizá el ejemplo más conocido de un mecanismo esférico. Eslabonamientos esféricos son aquellos que se componen exclusivamente de pares de revoluta. Un par esférico no produciría restricciones adicionales y, por ende, sería equivalente a una abertura en la cadena, en tanto que todos los demás pares inferiores poseen movimientos no esféricos. En el caso de eslabonamientos esféricos, los ejes de todos los pares de revoluta se deben intersecar en un punto. Los mecanismos espaciales no incluyen, por otro lado, restricción alguna en los movimientos relativos de las partículas. La transformación del movimiento no es necesariamente coplanar, como tampoco es preciso que sea concéntrica. Un mecanismo espacial puede poseer partículas con lugares geométricos de doble curvatura. Cualquier eslabonamiento que comprenda un par de tornillo, por ejemplo, es un mecanismo espacial, porque el movimiento relativo dentro del par de tornillo es helicoide. Por lo tanto, la categoría abrumadoramente más numerosa de mecanismos planos y la de los esféricos son apenas unos cuantos casos especiales, o subconjuntos, de la categoría general de mecanismos espaciales. Estos se obtienen como una consecuencia de la geometría especial en las orientaciones particulares de los ejes de sus pares. Si los mecanismos planos y esféricos son sólo casos especiales de mecanismos espaciales, ¿por qué es aconsejable identificarlos por separado? Debido a que por las condiciones geométricas particulares que identifican estas clases, es factible hacer multitud de simplificaciones en su diseño y análisis. Dado que la inmensa mayoría de mecanismos en uso hoy en día son planos, nuestro estudio se centrará en ellos, sin minimizar la importancia de los mecanismos esféricos y espaciales. Como se señaló con anterioridad, se pueden observar los movimientos de todas las partículas de un mecanismo plano en el tamaño y forma reales, desde una sola dirección. En otras palabras, es factible representar gráficamente todos los movimientos en una sola perspectiva, de donde, las técnicas gráficas son muy apropiadas para su solución. Eslabonamientos Los eslabonamientos son los bloques de construcción básicos de todos los mecanismos. Todas las formas comunes de mecanismos como levas, engranes, bandas, cadenas etc., son variantes comunes de eslabonamientos. Los eslabonamientos se componen de eslabones y juntas. Eslabón Un eslabón es un cuerpo rígido (supuesto) que posee por lo menos dos nodos que son puntos de unión con otros eslabones. Se dividen en: 1. Eslabón binario • Tiene dos nodos 2. Eslabón ternario • Tiene tres nodos 3. Eslabón cuaternario • Tiene cuatro nodos Junta (pares cinemáticos) Una junta es una conexión entre dos o más eslabones (en sus nodos), la cual permite algún movimiento, o movimiento parcial, entre los eslabones conectados. Calificación de Reuleaux Par inferior.- Describe aquellas juntas con contacto superficial (como un pasador rodeado por un orificio. Par superior.- Describe aquellas juntas con contacto de punto o de línea. La principal ventaja práctica de los pares inferiores sobre los pares superiores es su mejor capacidad de atrapar el lubricante entre sus superficies envolventes. La junta de pasador giratorio presenta bajo desgaste y larga vida incluso mejor que la junta prismática de corredera. Movimiento Circular y linear V D Se define como movimiento circular aquél cuya trayectoria es una circunferencia. Cuando un cuerpo se encuentra girando, cada una de las partículas del mismo se mueve a lo largo de la circunferencia descrita por él. Esta velocidad lineal también recibe el nombre de tangencial. 𝜋𝐷𝑛 60 2𝜋𝑟 𝑉𝑡 = 𝑇 𝑉𝑡 = 𝑤 ∗ 𝑟 𝑉𝑡 = Donde: Vt= velocidad periferica o tangencial D=Diametro n=Revoluciones por minuto r=radio T=periodo (tiempo en completar un ciclo) 𝑟𝑎𝑑 𝑤 = 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑎𝑛𝑔𝑢𝑙𝑎𝑟 ( ) 𝑠𝑒𝑔 Ejemplo: Velocidad Calcular la velocidad tangencal de un punto que gira alrededor de un circulo con un diametro de 0.5m siendo que el circulo gira a 10RPM 𝑉𝑡 = 𝜋(0.5)(10) = 0.26 𝑚⁄𝑠 60 El radian “Un radian es un angulo cuyos lados comprenden un arco cuya longitud es igual al radio de la circunferencia” Para obtener el valor del angulo “θ“ en radianes usamos la formula: 𝜃𝑟𝑎𝑑 = 𝐴𝑟𝑐𝑜 (𝑠) 𝑅𝑎𝑑𝑖𝑜 (𝑟) 1 rad=57.3° Velocidad Angular Cuando un objeto se mueve en una circunferencia, llevará una velocidad, ya que recorre un espacio, pero también recorre un ángulo. Para tener una idea de la rapidez con que algo se está moviendo con movimiento circular, se ha definido la velocidad angular (ω) como el número de vueltas que da el cuerpo por unidad de tiempo. De manera sencilla: en el movimiento circular la velocidad angular está dada por la cantidad de vueltas que un cuerpo da por segundo. Otra manera de decir lo mismo sería: en el movimiento circular la velocidad angular está dada por el ángulo recorrido (θ) dividido por unidad de tiempo. El resultado está en grados por segundo o en rad por segundo. 𝑤= ∆𝜃 2𝜋 ∴𝑤= ∆𝑡 𝑇 Donde: w=Velocidad angular (rad/seg). 𝜃= desplazamiento angular en radianes. t= tiempo en segundos en que se efectuo el dezplazamiento angular. T=Periodo (tiempo en dar una vuelta o ciclo) Ejemplo velocidad angular: Una circunferencia rueda sobre su propio centro y da 3 vueltas en 1 segundo, ¿Cuál es la velocidad angular? 𝑇= 1 = 0.3333 3 puesto que tarda un tercio de segundo en efectuar un ciclo. 𝑤= 2𝜋 𝑇 2𝜋 = 1 = 6𝜋 = 18.84 𝑟𝑎𝑑/𝑠𝑒𝑔 ⁄3 puesto que recorre al girar una vez 2𝜋 , y al recorrer 3 vueltas 6 𝜋, en un segundo. 𝑤= 6𝜋 = 18.84 𝑟𝑎𝑑/𝑠𝑒𝑔 1 Aceleración angular Tal como el movimiento lineal o rectilíneo, el movimiento circular puede ser uniforme o acelerado. La rapidez de rotación puede aumentar o disminuir bajo la influencia de un momento de torsión resultante. La aceleración angular (α) se define como la variación de la velocidad angular con respecto al tiempo y está dada por: 𝑤𝑓 − 𝑤𝑖 𝛼= 𝑡 𝛼 = 𝑤2 ∗ 𝑟 donde: α = aceleración angular final en 𝑟𝑎𝑑⁄ 𝑠𝑒𝑔2 ωf = velocidad angular final en rad/s ωi = velocidad angular inicial en rad/s t = tiempo transcurrido en segundos r= radio (m) Ejemplo: aceleracion angular ¿Que aceleracion posee un punto en el extremo de una cuerda cuando esta gira a 10 rad/seg y mide desde el extremo 70cm? 𝛼 = 𝑤 2 ∗ 𝑟 = (10)2 (0.7) = 70 𝑟𝑎𝑑/𝑠𝑒𝑔2 Aceleracion Tangencial 𝛼𝑡 = 𝑣𝑡𝑓 − 𝑣𝑡𝑖 𝑡 𝑎𝑡 = 𝛼 ∗ 𝑟 Donde: 𝛼𝑡 =Aceleacion tangencial 𝑣𝑡𝑓 =Velocidad tangencial Final 𝑣𝑡𝑖 =Velocidad tangencial Inicial 𝛼=Aceleracion angular r= radio Ejemplo: aceleracion tangencial Calcule la aceleracion tangencial de un punto sobre un disco que posee 3m de diametro y se acelera en 55 rad/s^2. 𝑎𝑡 = 𝛼 ∗ 𝑟 = 55(1.5) = 82.5𝑚/𝑠^2