Tipos de Compensación Tipos de compensadores
Anuncio

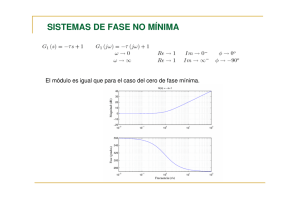
- CONTROL DE PROCESOS (segundo cuatrimestre) - CONTROL AVANZADO y AUTOMATISMO Facultad de Ingeniería – UNER Carrera: Bioingeniería Planes de estudios: 1993 y 2008 Tipos de Compensación + Gc(s) + - Gp(s) - G1(s) + - Gp(s) Gc(s) H(s) H(s) Compensación en serie Compensación en paralelo o de retroalimenación La elección entre una y otra depende de la naturaleza de las señales del sistema, niveles de potencia en los diversos puntos, los componentes disponibles, la experiencia del diseñador con el sistema, las consideraciones económicas, etc. Tipos de compensadores y Atraso o retardo de Fase: Gc ( s) = K c β y Adelanto de Fase: s+ 1 τs + 1 τ = Kc 1 βτs + 1 s+ βτ β >1 1 Gc ( s ) = K cα y Atraso - Adelanto s+ τs + 1 τ = Kc 1 ατs + 1 s+ ατ Teoria 2 de Control - Bioingeniería UNER 0 <α <1 1 Circuito de un Compensador T .s + 1 E ( s ) R 2.R 4 ( R1.C1.s + 1) = =Kβ β .T .s + 1 E ( s ) R1.R3 ( R 2.C 2.s + 1) o c i R 4.C1 R3.C 2 T = R1.C1 β .T = R 2.C 2 K = c R1.C1 < R 2.C 2 ⇒ Comp. ATRASO R1.C1 > R 2.C 2 ⇒ Comp. ADELANTO Compensación utilizando Métodos de Respuesta en Frecuencia Compensación en adelanto Se utiliza el compensador en adelanto siguiente 1 Gc ( s ) = K cα s+ τs + 1 τ = Kc 1 ατs + 1 s+ ατ 0 <α <1 donde alfa es el factor de atenuación y Kc es la ganancia del compensador adelanto. El diagrama polar del compensador es: G c ( j ω ) = K cα jωτ + 1 j ωατ + 1 ωm 1 (1 − α ) 2 ω=0 α 1 (1 + α ) 2 Teoria 2 de Control - Bioingeniería UNER θm ω→∞ 1 2 sen θ m = El ángulo de fase máximo es: 1−α 1+α El diagrama de Bode del compensador, para τ = 1, α = 0.1 es dB 10 0 − 10 − 20 90º 0º 0.1 1 100ω → 10 10 El ángulo máximo del compensador ocurre en la frecuencia media entre polo y cero: log ω m = 1 1 ⎞ 1⎛ ⎜ log + log ⎟ τ ατ ⎠ 2⎝ ωm = 1 ατ Técnicas de compensación en adelanto 1) Suponga el compensador en adelanto Gc (s ) = K cα τs + 1 ατs + 1 defina K = K cα El compensador y la planta en lazo abierto quedan Gc (s )G (s ) = τs + 1 KG (s ) ατs + 1 Determine la ganancia K que satisfaga el requisito de constante estática de error propuesta 2) Dibuje el diagrama de Bode K.G(s).H(s) 3) Determine el ángulo de fase que se necesita agregar al sistema. A ese valor, agréguele de 5º a 12º más (por el desplazamiento de la magnitud). 4) Con el ángulo deseado, determine el factor de atenuación senθm = 1−α 1+ α después determine la frecuencia donde la magnitud del sistema no compensado sea: 1 − 20log⎛⎜ ⎞⎟ ⎝ α⎠ Teoria 2 de Control - Bioingeniería UNER 3 Esta frecuencia es la nueva frecuencia de cruce de ganancia. Utilizando esta frecuencia la ecuación ωm = 1 se obtiene el valor del cero 1 ατ y del polo τ 1 ατ 5) Con K y α , calcule la constante del compensador Kc = K α 6)Verifique el margen de ganancia del sistema compensado. Ejemplo: Dado G(s) diseñe un compensador en adelanto que haga que el error en estado estable ante una rampa sea de 0,05. Al mismo tiempo, el margen de fase sea mayor a 45°. G(s) = 7 .5 s( s + 3) Solución: 1) Se supone un compensador en adelanto de la forma Gc ( s ) = K cα jωτ + 1 jωατ + 1 se define K = K cα 2) Se encuentra la ganancia K que junto con el sistema cumplan con la constante de error estático de velocidad. Kv = limsGc (s)G(s) = lim s→0 τs +1 s→0 ατs +1 KG(s) = lim s7.5K s→0 s(s + 3) = 2.5K = 20 K =8 3) Se realiza el diagrama de Bode del sistema a compensar con la ganancia K: 60 KG ( s) = s ( s + 3) Teoria 2 de Control - Bioingeniería UNER 4 4) Del diagrama de Bode, observe el margen de fase y determine el adelanto de fase que se requiere agregar: M f = 21.9° M f deseado = 45° φm = M f deseado − M f + 5° φm = 28.1° ≈ 28° 5) De φmse obtiene α sen θ m = 1−α 1+α α = 0.361 6) Ahora se calcula el cambio de magnitud que se obtiene al agregar el compensador. Se utiliza: 20 log(1 / α ) 20 log(1 / 0.361) = 4.4249 se observa en el diagrama de Bode en qué frecuencia se tiene una magnitud de − 20 log(1 / α ) y se define como la nueva frecuencia de cruce de ganancia. ωc = 9.77 rad / seg. El máximo aporte de fase del compensador debe ocurrir en wm: ωm = 1 ατ = ωc 7) Se obtiene el cero y el polo del compensador cero 1 = α ωc = 5.88 polo τ 1 ατ = ωc = 16.24 α 8) Con α y K se obtiene la ganancia del compensador Kc = K α = 22,3 y el compensador es Gc ( s ) = 8 * s + 5,88 0,17.s + 1 = 22,3 s + 16,24 0,061.s + 1 Teoria 2 de Control - Bioingeniería UNER 5 Gc Gc G G Gc GcG M f = 45.1° a 9.77 rad / seg G PARA PENSAR: ¿Cómo diseño un compensador en adelanto si el requisito de diseño es un error estático y el MARGEN de GANANCIA? Ejemplo: Dado G(s) diseñe un compensador en adelanto que logre un error de posición (offset) menor al 5% y un margen de ganancia superior a 6[dB]. El Margen de ganancia es el requisito de diseño. G(s) = 20 ( s + 1) .( s + 5).( s + 10) Compensación en atraso 1 Gc ( s ) = K c β el valor del polo − 1 s+ τs + 1 τ = Kc 1 βτs + 1 s+ βτ β >1 es más positivo que el del cero − βτ 1 τ . El diagrama polar del compensador en retraso es Im Kc ω→∞ Kcβ ω=0 Teoria 2 de Control - Bioingeniería UNER Re 6 El diagrama de Bode es el siguiente: dB 20 β =10 τ =1 Kc =1 10 0 0º − 90 º 0.01 0 .1 10 ω → 1 El valor más negativo de la fase se encuentra entre las frecuencias asociadas al polo y al cero. Mientras que la magnitud total disminuye en 20 dB. Técnicas de compensación en atraso 1) Suponga el compensador en atraso Gc ( s ) = K c β se define K = K c β 1 s+ τs + 1 τ = Kc 1 βτs + 1 s+ βτ β >1 y el sistema compensado es Gc ( s )G ( s ) = τs + 1 KG ( s ) βτs + 1 2) Determine la ganancia K que satisfaga el requisito de constante estática de error propuesta 3) Dibuje el diagrama de Bode del sistema sin compensar con la ganancia K calculada en el punto anterior. 4) Si no cumple con los requisitos de margen de fase deseados. Entonces encuentre la frecuencia donde el ángulo de la fase es -180º más el margen de fase requerido, más unos 5 o 12 grados. 5) Seleccione esta frecuencia como la nueva frecuencia de cruce de la ganancia. 6) Seleccione la nueva frecuencia de corte del cero (1/T) una década mas chica que la nueva frecuencia de cruce de la ganancia, obtenida en el paso 5. Esto se hace para alejar de la frecuencia de cruce, los efectos del atraso de fase. 7) Determine la atenuación necesaria para llevar la curva de magnitud a cero dB, en la nueva frecuencia de cruce. Con esta atenuación se determina el valor de β . dB = −20 log β Teoria 2 de Control - Bioingeniería UNER 7 β y el cero, se obtiene la frecuencia de 8) Con el valor de corte del polo 1 βτ 9) Por último se obtiene la ganancia del compensador: Kc = K β Ejemplo: Compense por atraso el siguiente sistema: G(s) = 2 s ( s + 1)( s + 2) de forma tal que la constante de error estático de velocidad −1 sea de 5 seg , el margen de fase sea al menos de 40° y el margen de ganancia al menos de 10dB. . Solución: 1) Se utiliza un compensador en atraso de la forma Gc ( s ) = K c β se define τs + 1 βτs + 1 K = Kc β 2) Ajustar la ganancia K para que junto al sistema cumpla con las especificaciones de error estático de velocidad. K v = lim s s →0 2 τs + 1 =5 KG ( s ) = lim sK s →0 βτs + 1 s ( s + 1)( s + 2) K =5 3) Se realiza el diagrama de Bode del sistema a compensar con la ganancia K KG ( s ) = KG ( jω ) = 10 s ( s + 1)( s + 2) 5 jω ( jω + 1)( j 0.5ω + 1) Teoria 2 de Control - Bioingeniería UNER 8 3) Diagrama de Bode 4) Del diagrama de Bode, observe el margen de fase. El sistema tiene un margen de fase de -13°, por lo que es inestable. Se busca el valor de frecuencia en donde se tiene un ángulo de fase de -180°+ el margen de fase deseado + 12° de margen de seguridad. − 180º +40º +12 º = −128º 5) Generalmente se coloca el cero para que tenga un frecuencia de corte una década menor que la nueva frecuencia de cruce de ganancia. En este caso correspondería a 0,05 [rad/seg], pero por cuestiones de diseño, no se recomiendan constantes de tiempo muy grandes y se opta por asignar al cero una frecuencia de corte de 0,1 [rad/seg] 1 τ = 0.1 6) Lo siguiente es hacer que en la nueva frecuencia de cruce seleccionada ( 0,47 [rad/seg] ) la magnitud pase por 0 [dB]. De la gráfica de Bode se observa que en la frecuencia de cruce seleccionada, la magnitud es de 19.4, se aproxima a 20 [dB]: − 20 = −20 log β β = 10 Teoria 2 de Control - Bioingeniería UNER 9 7) Con el valor de β y el valor del cero, se obtiene el polo 1 βτ = 1 100 8) Por último se obtiene la ganancia del compensador: Kc = K β = 5 10 El compensador en atraso queda: Gc ( s ) = 0.5 s + 0 .1 s + 0.01 PARA PENSAR: ¿Cómo diseño un compensador de ATRASO si el requisito de diseño es un error estático y el MARGEN de GANANCIA? Ejemplo: Dado G(s) diseñe un compensador de ATRASO que logre un error de posición (offset) menor al 5% y un margen de ganancia superior a 6[dB]. El Margen de ganancia es el requisito de diseño. G(s) = 20 ( s + 1) .( s + 5).( s + 10) Ejemplo: Colocar un compensador de ADELANTO en serio con el de atraso recién diseñado para mejorar el Margen de FASE y llevarlo a unos 45º conservando el margen de ganancia y el error de posición anteriores. ESTO ES UN COMPENSADOR DE ATRASO – ADELANTO!!!! G(s) = 20 ( s + 1) .( s + 5).( s + 10) Teoria 2 de Control - Bioingeniería UNER 10