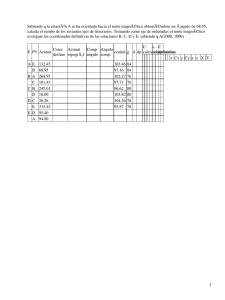
TEMA 9. Radar
Anuncio

Tecnología de Comunicaciones Inalámbrica ((TCI TCI)) 2012--2013 2012 TEMA 9. Radar Juan Carlos Crespo [email protected] 1 INTRODUCCIÓN En este capítulo expondremos los conceptos fundamentales sobre localización de objetos y obtención de imágenes mediante radiolocalización: radar • • • • Cómo funciona un radar y sus limitaciones Tipos de radar y funciones Radares de Apertura Sintética: Alta resolución Radares 3D 2 INDICE 9.1. 9 1 Principios fundamentales de radiolocalización – fundamentales de radiolocalización radar (tipos) radar (tipos) 9.2. Radares de medida de distancia en rango 9 3 Radares de medida 9.3. Radares de medida de velocidad de velocidad 9.4. Radar de alta resolución bidimensional (SAR) 9 5 Radar 3D: SAR Interferométrico 9.5. Radar 3D: 9.6. Ejemplo de MATLAB 3 9.1. Principios Fundamentales de un Radar Un radar tiene por función/objeto, explorar mediante energía electromagnética su entorno. Al enviar radiación electromagnética no necesita un medio físico donde se propague. propague El siguiente esquema recoge un esquema conceptual recogiendo los componentes básicos de un radar: 4 9.1. Principios Fundamentales de un Radar Un radar tienen por función/objeto, explorar mediante energía electromagnética su entorno. Para ello es necesario considerar, al menos, tres aspectos fundamentales: -La engería enviada debe alcanzar el área o objeto a explorar con suficiente energía que permita, después de sufrir ésta la reflexión sobre el mismo, ser recibido de vuelta por el radar con suficiente potencia para ser detectado: ECUACIÓN RADAR - Normalmente resulta más simple emplear radares pulsados, es decir, se envía un pulso g , se cierra el transmisor,, y se abre el receptor p esperando p recibir de vuelta la de energía, energía enviada. En este proceso es necesario poder distinguir a qué pulso enviado corresponde la energía recibida: DISTANCIA AL OBJETO / RESOLUCIÓN EN RANGO y medida de distancia en rango. g ((Se define f rango g como la perpendicular p p a la dirección de máxima radiación del radar) - Capacidad para distinguir el desplazamiento en frecuencia sufrido por la onda electromagnética, debido a la diferencia de velocidades entre el radar y el objeto iluminado: frecuencia Doppler 5 9.1. Principios Fundamentales de un Radar ECUACIÓN RADAR Supongamos un antena transmitiendo un señal con longitud de onda λ con una potencia Pt , que alcanza después de recorrer una distancia R un objeto con un coeficiente de de reflexión (backscatter) σ , ¿qué potencia será la que se recibirá en la misma antena? Normalmente, no se puede considerar concentrado el coeficiente de reflexión en un único punto, por lo que se define el coeficiente de reflexión diferencial, σo como el valor medio del coeficiente de reflexión por unidad de área, así: 6 9.1. Principios Fundamentales de un Radar RESOLUCIÓN EN RANGO El radar envía pulsos de duración τp cada PRI segundos (Pule Repetition Interval). • El PRI debe ser tal que se reciba el pulso de vuelta antes del envío del siguiente • Un pulso se extiende en el espacio cubriendo una distancia igual a c . τp por tanto tanto, se podrán distinguir como objetos distintos siempre que estos estén separados al menos c . τp/2 (resolución en rango) z recepción emisón τp c τp PRI El tiempo que se tarda en recibir la señal de vuelta determina la distancia: c . T /2 Siendo T el tiempo de ida y vuelta de la señal o retardo. “el el flanco anterior del eco del objeto más distante debe llegar al receptor más tarde que el flanco posterior del eco del objeto más cercano” H c τp δr = c τp/2 y 7 9.1. Principios Fundamentales de un Radar RESOLUCIÓN EN RANGO Esquema conceptual de bloques de un radar pulsado. Siendo T, representa el retardo y A la modificación global del pulso en enviado: reflexión y atmósfera, atmósfera el pulso recibido: p la ecuación radar se debe obtener una energía g Aplicando recibida suficiente a partir de la energía transmitida: Pt(w) . τp Debido a que en envío de pulsos suficientemente estrechos y con energía suficiente es difícil tecnológicamente, se emplean en muchas casos pulsos modulados. 8 9.1. Principios Fundamentales de un Radar FRECUENCIA DOPPLER, DOPPLER MEDIDA DE VELOCIDAD El radar envía una onda electromagnética con frecuencia central fc, y recibe la energía enviada modificada por el coeficiente de reflexión y desplazada en frecuencia fD (frec encia Doppler). (frecuencia Doppler) A partir de la fD es posible obtener la diferencia de velocidades elocidades entre ambos: radar y objeto iluminado. El retardo temporal entre el pulso enviado y el recibido no es relevante. Donde uR es la velocidad en la dirección R 9 9.1. Tipos de Radares • Unidimensionales: -Medida de Distancia en rango: pulsados (ya vistos) y Chirp -Medida Medida de velocidad elocidad • Bidimensionales – teledetección • Tridimensionales – levantamiento de Terreno (DTM: Digital Terrain Model) 10 9.2. Ejemplo: Radar pulsado c/s Chirp • Unidimensionales: - Radar pulsado con y sin modulación (Chirp) Geometría General El se desplaza a velocidad , V, en línea recta y altura, H (constantes). La antena apunta lateralmente de forma que su haz sea perpendicular a la trayectoria y dirigido hacia tierra plana. Ejes de coordenadas, acimut, en la dirección de vuelo, y rango, dirección del máximo del diagrama de radiación de la antena. La mínima distancia en rango en el plano de visión como: Ro, y que, al depender de rango, en general se representará por la función Ro(r). Z Lr θl R o H R Se define el ángulo de apuntamiento (look angle,θ l) como el ángulo delimitado por la recta del máximo del lóbulo principal de la antena y la vertical. θa θi X Y El ángulo de incidencia, θ i, se define como el comprendido entre la normal a la superficie de la tierra en el punto de interés y la recta del máximo del lóbulo principal de la antena (si la tierra es plana ambos coinciden) 11 9.2. Ejemplo: Radar pulsado c/s Chirp recepción emisón • Unidimensionales: - Pulsados Resol ción en Rango Resolución τp PRI La resolución en rango, δr, vendrá limitada por la duración de los pulsos emitidos, τp. Lógicamente, para poder discriminar dos objetos situados en la misma dirección en rango, es necesario i que ell flanco fl anterior del d l eco del d l objeto b más distante d ll llegue all receptor más tarde que el flanco posterior del eco del objeto más cercano. Así la resolución en rango en el plano de visión del radar se puede expresar como: δr = cτp / 2 que expresa la separación mínima entre dos curvas equitemporales Caso de ángulo de incidencia θi pequeño Caso de ángulo de incidencia θi grande θi θi δr δr δrt Poca Resolución sobre el terreno superficie fi i Debido a la geometría, para una misma resolución en el plano de visión, dr, la resolución que se obtiene sobre el terreno varía con el ángulo de incidencia incidencia, qi, empeorando cuanto menor sea éste, como puede apreciarse en δrt Buena Resolución sobre el terreno 12 9.2. Ejemplo: Radar pulsado c/s Chirp • Unidimensionales: - Resolución en Rango - Modulación Si la duración de los ppulsos emitidos pudiera p hacerse arbitrariamente estrecha,, se podría p elevar la resolución en rango tanto como fuese necesario, sin embargo, a medida que se disminuye la anchura del pulso, es necesario aumentar la potencia de pico enviada para mantener la potencia media en valores razonables, y así, obtener una relación señal/ruido (Signal to Noise Ratio, Ratio S/R) aceptable, aceptable por lo que pronto se llegaría a un límite tecnológico. tecnológico Como se verá, una solución al problema es introducir una modulación en el pulso emitido y realizar posteriormente su compresión. Con esta técnica es posible alcanzar resoluciones en rango g aceptables p sin degradación g del margen g de S/R. τ τp fc τ Br La modulación habitualmente empleada es la modulación lineal en frecuencia, FM. Al pulso enviado se denomina comúnmente pulso "chirp” La resolución ya NO es función del ancho del pulso sino de su ancho de banda (B): δr = c 2B τp 13 9.2. Ejemplo: Radar pulsado c/s Chirp La frecuencia el pulso enviado crece linealmente con la frecuencia, de la misma f forma ell recibido. ibid Sii se hace h pasar por un ffiltro l que retarda la señal linealmente en función de la frecuencia, entre f1 y f2, teóricamene la señal en el tiempo tendría una anchura τp cero. En la práctica, debido a que la diferencia entre f1 y f2 es finita fi i (finito (fi i ell B), B) se produce d un pulso l “comprimido con forma de sen(x)/x , i.e.: sinc(x), cuya anchura se aproxima por 1/B 14 9.3. Ejemplo medida velocidadvelocidad- Doppler • Unidimensionales: -Medida de velocidad - Doppler Z La frecuencia Doppler se puede expresar, para ángulos pequeños (<30º) y considerando el recorrido de ida y vuelta de la señal radar,, como: fD = - (2V/λ) senθα(t) Donde θα(t) , representa el ángulo formado entre t la l perpendicular di l a la l línea lí d vuelo de l y la l recta que une el radar y el punto observado en función del tiempo en acimut, t. Aproximando el seno ppor el ángulo g y el desplazamiento p ppor el arco, podemos expresar la frecuencia Doppler como: fD = - 2(V/λR)x H Δθ θ R x2 X R x1 Y Δ x Así, la frecuencia Doppler inducida por un punto situado en x1, será, - 2(V/λR)x1, mientras que la de otro en x2, situado a igual distancia en rango e iluminado por el haz radar en el mismo instante, sería í de d -2(V/λR)x 2(V/λR) 2 15 9.3. Ejemplo medida velocidadvelocidad- Doppler • Unidimensionales: U idi i l -Medida de velocidad - Doppler Si sólo existiera un “blanco/punto” que produzca d d l desplazamiento i t D l Doppler, su velocidad se puede obtener como se vio en la transparencia 9. curvas equidoppler curvas equitemporales -f En la E l práctica á ti hay h “infinitos “i fi it puntos”, t ” por lo l que habrá que buscar cómo separar las variaciones en frecuencia que producen cada uno siempre p qque sean separables. p El lugar geométrico de los puntos que producirían un mismo desplazamiento Doppler es una hipérbola en el plano XY, resultado de l intersección la i t ió de d conos coaxiales i l cuyo eje j es la trayectoria y dicho plano: -f f1 1 t 2 t f 2 2 1 X2[(2V / lfD)2-1] 1] - y2 = H2 16 área iluminada 9.4. Ejemplo Bidimensional: Apertura Sintética • Bidimensional: Bidi i l Radar de visión lateral SAR - Resolución en rango: g en función de la modulación / ancho de banda del ppulso comprimido p (igual que el caso de radar en rango con modulación) - Resolución en acimut: en función del ancho de banda Doppler La resolución l ió en acimut i máxima á i alcanzable, l bl es función del ancho de banda Doppler, BD. Éste vendrá dado por la diferencia entre las frecuencias Doppler máxima, fDmax , y mínima, fDmin D D i . Las frecuencias Doppler máxima y mínima se alcanzarán para cada punto del terreno cuando éste esté iluminado por los extremos del haz radar (i.e., separados θa, apertura angular l de d la l antena real). l) (donde fc representa la frecuencia de la portadora). Así: Z θa Y BD ≈ (2V/λ) [sen(θa/2) - sen(-θa/2)] fc BD ≅ 2V / La La: Longitud de la antena en la dirección de vuelo ( i t) (acimut) fc + fDmin r X fc + fDmax 17 9.4. Ejemplo Bidimensional: Apertura Sintética • Bidimensional: Bidi i l Resolución R l ió en acimut i • La longitud de la apertura sintética máxima sintetizable, LA, viene limitada por la necesidad de que un mismo objeto debe ser captado por la antena radar durante todo el tiempo i que en que ésta é dure, d es decir, d i la l apertura máxima á i sintetizable i i bl seráá de: d LA(r) = Ro(r)⋅θa Resolución máxima en acimut. La resolución en acimut, δa, en función de la capacidad de discriminación en frecuencia Doppler, resolución Doppler, δfD , se expresa como: Z LA δa = (λR / 2V)δfD θa La Ro(r) θA Y La resolución máxima en frecuencia será la inversa del tiempo de observación[1], TA, tiempo en que un objeto permanece iluminado, es decir el tiempo en que el radar recorre la longitud de su apertura sintética, así: TA = R θa / V = R λ / La V = 1/δfD y por tanto: δa = (λR / 2V) (La V / R λ ) δa = La / 2 X ¡Resolución que aumenta a medida que disminuye la longitud de la antena[2] en acimut e independiente de la distancia y de la 18 longitud de onda! 9.4. Ejemplo Bidimensional: Apertura Sintética • Bidimensional: Bidi i l Respuesta R a un Blanco Bl Puntual P l (rango) ( ) Cada pulso de la señal enviada, para una portadora de frecuencia fc tendrá la forma: ss(t, t) = a(t) Π(t) exp[j2π(fc+kt)t] -B /2 B/2 A m plitud τ -1/B -3/B -2/B 0 1/B 2/B 3/B Donde: τp • t, representa el tiempo en dirección del rango (retardo en rango), reservando t para el tiempo en la dirección del desplazamiento del CFA, acimut. • a(t), representa el diagrama de radiación de la antena que es considerado localmente constante para cada t y t. • Π(t), representa un pulso rectangular que consideraremos centrado en t = 0 y de duración tp. • k , es ell factor f de d modulación d l ió lineal li l en frecuencia f i (chirp ( h rate). ) D Dependiendo di d ddell signo i de d k, k se tendrá un crecimiento en frecuencia (up-chirp) o decrecimiento (down-chirp). Nota: La doble notación en minúsculas para la señal, ss(⋅), se ha escogido para denotar que es una señal bidimensional y representada en ambas dimensiones (rango y acimut) en el dominio del tiempo 9.4. Ejemplo Bidimensional: Apertura Sintética • Bidimensional: Bidi i l Respuesta R a un Blanco Bl Puntual P l (acimut) ( i ) Calculemos la evolución de fase de un blanco. Al recorrer el radar su apertura sintética. Nótese cómo la variación de R fuerza que la fase de la señal llegue retrasada. Z si R(t) es la distancia al blanco y Ro, la distancia mínima a éste, éste entonces, entonces la fase de la señal enviada en iada 2 2 Δφ(t) ≈ (2π / λ) (Vde t /ida Ro) y vuelta) de: sufrirá un retraso (recorrido q ppresenta una evolución cuadrática de la fase que respecto al tiempo en acimut, es decir lineal en frecuencia. Se observa que la evolución de fase en acimut anteriormente calculada es similar a la introducida (por diseño) en rango si se emplea modulación FM. H Ro R X Y R2(t) = Ro2 + (Vt)2 R(t) ≈ Ro + (Vt)2/2Ro + … 9.4. Ejemplo Bidimensional: Apertura Sintética La señal, así retrasada y modulada por la reflectividad del terreno, es recibida por el radar. En el receptor la señal recibida se suma coherentemente con la señal de referencia del receptor (generada por un oscilador local en fase) para su demodulación. Así, cuando ambas están en fase (diferencia de fase: 0, 0 2π, 2π 4π, 4π ...), ) se alcanzará un máximo de la señal resultante, resultante mientras que cuando están en contrafase (π, 3π, 5π, ...) se tendrá un mínimo. T ie m p o e n a c im u t, t Representado en ordenadas la evolución cuadrática de la fase de la señal recibida (antes de la demodulación) respecto al tiempo en acimut o el espacio recorrido por el radar durante su apertura sintética (abcisas). 8π 6π 4π 2π Mientras que en la parte inferior, se ha representado la amplitud de la señal después de su demodulación (resultado de la suma coherente que tiene lugar en el demodulador). Observándose nuevamente de forma gráfica la variación lineal del periodo de la señal recibida con t. E s p a c io re o c o rrid o e n a c im u t, x 21 9.4. Ejemplo Bidimensional: Apertura Sintética • Bidimensional: Bidi i l Respuesta R a un Blanco Bl Puntual P l (rango ( y acimut) i ) La modulación sufrida en acimut por la señal radar es similar a la modulación chirp en rango. Por ello todo lo expuesto para la primera también es de aplicación a la segunda. Así, la respuesta de un blanco puntual en ambos ejes tendrá la misma forma. • Acimut: Por ello si se registrase la respuesta, procedente de un blanco puntual, ésta dejaría un "rastro" en acimut (señal bruta recibida) cuyas intensidades seguirían una función sen x/ x. • Rango: se tendría un comportamiento similar. similar Así, Así si representáramos la respuesta puntual en un plano (acimut-rango), la respuesta global sería la composición de ambas ra ango Acimut • Resolución en rango ~ 0’5 m • Resolución en acimut ~ 0’15 m 22 9.4. Ejemplo Bidimensional: Apertura Sintética • Bidimensional: Bidi i l V Variación i ió dde lla modulación d l ió en acimut, i migración i ió en rango La evolución de fase de un blanco depende de r, distancia en rango, y ésta varía de rango cercano a rango lejano cubriendo toda la imagen en ese eje. Así pues, cuanto mayor sea r, mayor es el tiempo de observación y mayor será la extensión temporal de la respuesta del blanco. blanco La modulación inducida en rango, depende fuertemente del rango, es decir se induce una modulación que depende del rango. Se ppuede observar la variación de la apertura p sintética en el pplano de visión. Igualmente, g en las figuras g se ha representado la señal tras la demodulación y en amplitud, que se obtendría de dos blancos puntuales situados a diferentes distancias en rango: R1 y R2 / R2 = 2R1. V A p ertu t ra ra ng o cerca no Respuesta en amplitud del blanco r1 1 Respuesta en amplitud del blanco r2 2 23 A p ertura ran go le jan o 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Técnica de Compresión en el tiempo y dominio de la frecuencia (rango y acimut) La extracción de σ (imagen del objeto) de la señal recibida se podría realizar en el tiempo (espacio de la señal), señal) mediante dos correlaciones cruzadas, cruzadas una para comprimir la señal dispersa en rango y otra para la compresión de la señal dispersa en acimut. Estos procesos, sin embargo, resulta más eficiente realizarlos en el dominio de la frecuencia • ϕ(t) pa(t) ( ) = ϕ(t) ϕ( ) * h (t) ( ) ; donde d d “*” * representa ell operador d convolución. l i Es fácil f il demostrar que la compresión en máxima cuando h(t) = ϕ* (t) ϕ* ((t)) pa(t) pa ( t ) = TA / 2 ∫ φ (t + s )φ * ( s )ds −T A / 2 24 9.4. Ejemplo Bidimensional: Apertura Sintética C Compresión ió de d un pulso l Modulación M d l ió intrapulso i t l LFM ( T=10 T 10 μseg, B = 100 Mhz) Mh ) pa (t ) = TA / 2 ∫ exp[2πj (φ t + φ t 1 2 2 ] / 2) exp[2πjφ 2ts ]ds −TA / 2 p a (t ) = {termino de fase} PSLR = - 13.26 13 26 dB sen(πφ 2TAt ) πφ 2TAt δr = c 2B • Aprovechando propiedades de la transformada de Fourier pa(t) = TF-1 [ ϕ(f). ϕ* (f)] Para procesar basta “comprimir la señal” tanto en rango como en acimut. 1)) FFT 2) Multiplicación (complejo conjugada de la función de referencia) 3) IFFT 25 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Diferencias entre rango y acimut • Rango Z Parametros conocidos e invariantes • Acimut θ sq Existencia de Migración en Rango y curvatura variable con el rango Falta de ortogonalidad de las coordenadas SAR fuera del cero Doppler Variación de los parámetros Doppler H Ro Rc R tc Necesidad de: " FILTRO DE COMPRESION DIFERENTE PARA CADA PUNTO" X Y 26 9.4. Ejemplo Bidimensional: Apertura Sintética • Bidimensional: Bidi i l toma de d imagen i bruta b – espacio i de d la l señal ñ l • Estudiemos primero la estructura de la señal recibida. Empleamos una geometría real, donde existe una desviación respecto a la perpendicular al vuelo, θsq Señal bruta (espacio de la señal) t c.τp 1 / PRF 2Ro/c τ El conjunto de ecos radar muestreados pueden ser almacenados de forma natural como un bloque bidimensional de muestras ordenado y referido a los ejes acimut y rango. Dicho orden representa una referencia temporal relativa al comienzo de la toma de imagen y al retardo al primer punto en rango para cada eco. Retardo relativo PRI τp τv Τv fijos durante la toma de imagen 1/ Fm 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Compresión en el dominio del tiempo versus dominio de la frecuencia • Compresión en el dominio del tiempo • Flexible, permite una función de compresión diferente para cada punto • GRAN CARGA COMPUTACIONAL: e.g. Compresión de una señal de longitud L y función de referencia de longitud M ==> Se requieren 2LM operaciones complejas (M=1000, L=2048 ==> 4 Millones de oporeaciones Complejas) • Requiere interpolaciones costosas (e imprecisas) para selección de puntos con información del blanco (migración en rango) • Compresión C ió en ell dominio d i i de d la l frecuencia f i ∞ g (t ) = ∫ f * (t )h(t + s )ds G(w) = F*(w)H(w) −∞ • Compresión de una línea cada vez: Si el ancho de banda de las modulaciones FM sufridas por la señal SAR se pueden considerar acotadas y a que los parámetros que las definen no varían de forma brusca, el espectro correspondiente a dos o más puntos de una misma línea (acimut) o columna (rango) son similares. • EFICIENTE: e.g. Compresión de una señal de longitud L y función de referencia de longitud M ==> Se requieren L+3Llog2(L) operaciones complejas (M=1000, L=2048 ==> 69.632 de operaciones Complejas) 28 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Compresión en el dominio de la frecuencia frecuencia, facilita la corrección de la migración en rango de la señal en acimut τ Domino del tiempo τ t acimut Domino rango Doppler rango-Doppler fDmin 0 acimut (Doppler) fDmax fa 29 9.4. Ejemplo Bidimensional: Apertura Sintética • Bidimensional: Bidi i l Influencia I fl i de d los l errores de d movimiento i i • Estudiemos primero la estructura de la señal recibida. Empleamos una geometría ideal donde no existe una desviación respecto a la perpendicular al vuelo, θsq Señal bruta (espacio de la señal) t c.τp 1 / PRF rango 2Ro/c τ Retardo relativo Acimut •En rango, la modulación es controlada por diseño •En acimut, la modulación es inducida, depende de la geometría, y en particular de la variación de R(LOS), y sus derivadas. 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Influencia de los errores de movimiento No se considera sistemas de CM en tiempo real Ventana de recepción en posición fija Antena NO estabilizada Errores entre pulso y pulso SITUACION MAS GENERAL Z dirección de imagen θ sq máximo de radiación trayectoria CFA H Ro acimut Rc R tc X Y 31 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Influencia de los errores de ACTITUD Efecto principal: variación Doppler Efectos añadidos: Errores en amplit amplitud d o mod modulaciones laciones en amplit amplitud d Errores geométricos Z z DERIVA GUIÑADA V ALABEO X CABECEO X Y Alabeo: Cabeceo: Deriva y guiñada: θ r (t ) = θ r + Δθ r (t ) Y θ p (t ) = θ p + Δθ p (t ) θ dj (t ) ≈ θ d + Δθ j (t ) Todos, T d a excepción ió del d l alabeo, l b suponen un desplazamiento d l i d la de l frecuencia f i en acimut (frecuencia Doppler), desplazamiento que es, en general, dependiente del rango, r. 32 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Error de actitud (ALABEO) SITUACIÓN NOMINAL EN RANGO Bp ¡Unico que no desplaza el espectro! Error en amplitud en rango (parte constante) Modulación en amplitud en acimut (parte variable) No existe error geométrico ALABEO Ganancia de ida y vuelta, relativa a la del máximo de radiación, se puede modelar en tensión para cualquier ángulo z τ 0 3 dB V −K real nominal a (t ) = a e ⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ θ 2 ⎞ ( t ) ⎟⎟ 2 θ 3 dB ⎟ ⎟ ⎟ ⎠ SITUACIÓN CON ALABEO Tv , con Ka ≈ 22'77 77 X Y Un error constante en θr(t), produce una error en ganancia i variable i bl para cada d rango pero constante t t en acimut. Sin embargo la parte variable, Δθr, induce una modulación de la intensidad de la señal en p ecos pares p emporando p el PSLR. acimut qque produce 2K ⎞ Δa ⎛ = ⎜⎜θ r (t ) 2 a ⎟⎟Δθ r θ 3dB ⎠ a ⎝ Δθ r = 2θ 3dB 1 K a PSLR 0 3 dB 33 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Error de actitud (CABECEO) CABECEO z Desplazamiento del espectro Doppler Error constante en amplitud y/o modulación en amplitud Error geométrico en acimut y rango V ERROR DE AMPLITUD EN ACIMUT (RANGO CERCANO) X Pa(f) Bp CABECEO Vx Y X f -f D 0 CABECEO αTv ERROR DE AMPLITUD EN ACIMUT (RANGO LEJANO) V Vx X Pa(f) Bp Y ERROR EN AMPLITUD EN RANGO -f D 0 f ERROR EN GANANCIA EN ACIMUT, POR VARIACIÓN ESPECTRO DOPPLER Δθ p = θ 32dB 1 K aθ p PSLR Y ERROR GEOMETRICO 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Error de actitud (DERIVA Y GUIÑADA) Lo consideraremos compuesto por su parte constante, θd, y su parte variable Δθj(t): θ dj (t ) ≈ θ d + Δθ j (t ) Produciendo una rotación del diagrama de radiación de la antena alrededor del eje vertical. DERIVA Y GUIÑADA z Desplazamiento del espectro Doppler Error constante en amplitud y/o modulación en amplitud Error geométrico en acimut y rango AMPLITUD NOMINAL EN ACIMUT (SIN ERROR) Pa(f) V Bp Vx X X Y f 0 ERROR DE AMPLITUD EN ACIMUT Vx Pa(f) X Y Bp ERROR EN AMPLITUD EN RANGO Δθ j = f -fd θ 32dB 1 K aθ d PSLR Y 0 ERROR EN AMPLITUD DEBIDO A VARIACION ESPECTRO DOPPLER ERROR GEOMETRICO 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Los errores de movimiento al menos tienen que tenerse en cuenta porque influyen en la Variación Doppler Frecuencia Doppler central ¡Factor de modulación ! Estructura de la señal bruta Varia ancho de banda Doppler R Resolución l ió máxima á i f D (t, r ) = − z BD = 2V (t ) λ sen θ sq (t ; r ) ⎛θ ⎞ sin⎜ 3dB ⎟ cos(θ sq ) λ ⎝ 2 ⎠ − 4V V − 2V 2 f dr ≈ cos 2 (θ sq ) λRo (r ) X SQUINT δa ≈ Δφ (t ; r ) = πBDTA Δf dr 4 f dr λ 1 La ≈ 2 θ 3dB cos(θ sq ) 0'89 * 2 * cos(θ sq ) Y ¡Los principales efectos de errores de actitud pueden ser englobados en el ángulo de squint! CORRECCION EN PROCESADO CONSIDERACION EN CADA PASO sen (θ sq ) = sen (θ l ) ⋅ sen θ djd + cos(θ l ) ⋅ sen p (θ p ) PASO DE CALIBRACION (C (Corrección ió radiométrica) di ét i ) 36 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Errores de Traslación PROBLEMA : ¿RELACION ENTRE LOS ERRORES DE TRASLACION Y SUS EFECTOS? Error en amplitud (relativo o absoluto) ERROR DE FASE (relativa) VARIACION DE LA MR (relativa) METODO: 1) Evaluación de los errores de fase (¡con squint!) en la imagen Z 2) Obtener los errores de fase que implica cada error de traslación significativo (velocidad, ...) ==> desarrollo en serie R(t;r) θ sq PROBLEMA ADICIONAL: ¿QUE ERRORES SON SIGNIFICATIVOS? Δy(t) Δz(t) ⎧⎪⎛ x(t ) − x ⎞ 2 ⎛ Δy (t ) ⎞ 2 ⎛ Roy ⎞ 2 Δy (t )Roy o ⎟⎟ + ⎜⎜ ⎟⎟ + ⎜⎜ ⎟⎟ − 2 Re (t ) = Ro ⎨⎜⎜ + Ro2 ⎪⎩⎝ Ro ⎠ ⎝ Ro ⎠ ⎝ Ro ⎠ Δx(t) H Ro 2 Re(t) R(t) Re (t ) = Ro Rc 2 2 ⎛ V t + ΔV (t ) dt − xo ⎞ ∫ ⎜ ⎟ − 2 Δy (t ) Ro − H + 2 Δz (t ) H + 1 ⎜ ⎟ Ro Ro Ro Ro Ro ⎝ ⎠ tc to ¡SOLO LOS CONTENIDOS EN EL PLANO DE VISION DEL RADAR! R oy En particular: t X xo Y rLOS (t ) = Δy (t )sen (θ l ) + Δz (t ) cos(θ l ) V (t ) 37 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Corrección de Erorres Necesidad Necesidad de de corregir: corregir: Variación de velocidad (geométricos y fase) Los desplazamientos p en LOS y sus derivadas (función ( de la apertura) p ) Los errores de fase inducidos Errores radiométricos debidos a los errores anteriores y de actitud Conclusiones: No es posible la corrección de V(t) sin antes corregir el desplazamiento en LOS La variación de fase debida a V(t) es dependiente del punto a enfocar (¡error residual si se corrige el LOS antes de la velocidad!) No es posible corregir el error en LOS exactamente antes de la compresión en rango La corrección en LOS debe constar de dos pasos: desplazamiento y fase (por ello no deben ser separados en general) Las correcciones de V(t), LOS y fase deben realizarse antes de la compresión en acimut La corrección de la MR se realiza de forma natural al corregir los errores de V(t), LOS y fase Error en LOS Señal bruta almacenda Acimut traza asumida de la historia en acimut de un blanco , si no se tiene en cuenta el error LOS traza real de la historia en acimut de un blanco , teniendo en cuenta el error LOS 38 9.4. Ejemplo Bidimensional: Apertura Sintética Sección de la imagen en Banda X polarización VV con CMdS, del aeropuerto de Dornier en Oberpfaffenhofen p ((Munich)) En la imagen la dirección de acimut corresponde a las abcisas y la dirección rango corresponde a ordenadas. La resolución en rango es de 3 m (≈ 4'41 m debido al enventanado t d Hamming H i 0'54), 0'54) mientras i t que lla resolución l ió en acimut i t procesada d es de d 1 m (1'47 debido al enventanado Hamming 0'54. El ángulo de squint medio: qsq ≈ 3'5º, que se ha considerado igual y constante para el procesado. 39 9.4. Ejemplo Bidimensional: Apertura Sintética Sección de la imagen en Banda X polarización VV con CMdS, CMdS del aeropuerto de Dornier en Oberpfaffenhofen (Munich). PARÁMETROS TÉCNICOS: Banda X (fo) 9’6 GHz en 19º / 33º Retardo a la 1ª muestra 18'5 μsg Apertura acimut/rango i t/ Velocidad nominal 75'02 m/sg Duración del pulso Ancho de banda, B Espaciado en rango 5 μ sg 50 MHz 1'5 m Resolución acimut Resolución rango Squint medio 1'0 m 3’0 m 3’4879 º 952'381 Hz ----571'0 m Hamming Acimut Hamming Rango Nº de subimágenes 0'54 0'54 1 PRF Presumming Altura media terreno 40 9.4. Ejemplo Bidimensional: Apertura Sintética • Procesado: Medidas de calidad Medias y desviaciones típicas de la resolución (los 5 conos) – Blancos puntuales: • PSLR: peak side lobe ratio • ISLR: integrated side lobe ratio res (m) ISLR PSLR media acimut 1.54478 -19.661 -14.673 σ acimut 0.01347 0.56492 0.63483 media rango 4.7656 -22.038 -16.661 σ rango 0.01493 1.03540 0.92933 PSLR ISLR 41 9.5. Ejemplo tridimensional: SAR Interferométrico Se emplean dos antenas … S1 Bd ξ S2 • θ • R1 • H R2 • Modos de funcionamiento: Simple Sól una Tx y Rx las Sólo l dos d Simple secuencial Sólo una Tx y Rx primero una y después la otra Dual Tx primero una Rx ella misma, después Tx la otra y recibe ella misma Doble T una y Rx Tx R las l dos, d después d é la l otra Tx T y Rx R las l dos d h y Bd, es la longitud de la línea de base R1, es el rango del blanco a la antena 1 R2, es el rango del blanco a la antena 2 ΔR, es la diferencia de espacio recorrido, i.e., R2-R1 H, es la altura de vuelo sobre suelo plano medida sobre la antena 1 θl, es el ángulo de apuntamiento medido desde la antena 1 ξ, es el ángulo de inclinación de la línea de base h, es la altura del objeto apuntado sobre el suelo x, es la proyección sobre el plano de tierra la línea de vuelo 42 9.5. Ejemplo tridimensional: SAR Interferométrico • Procesado: Obtención de la altura De la geometría se tiene que la altura h, se puede obtener mediante: h = H − R1 cosθ l y a su vez, la diferencia de espacio recorrido se puede obtener a partir de la fase de la diferencia de fase de las señales recibidas por ambas antenas, mediante: { } h = H − R1 cos ξ 1 − sen 2 (θ l − ξ ) − sen ξ sen(θ l − ξ ) Donde (θl-ξ), representa el ángulo de incidencia local, que puede calcularse a partir de la diferencia de espacio recorrido por la señal recibida por ambas antenas, mediante: sen(θ l − ξ ) = (R 1 + ΔR ) − R 2 − Bd 2 2 R1 Bd y a su vez,, la diferencia de espacio p recorrido se ppuede obtener a ppartir de la fase de la diferencia de fase de las señales recibidas por ambas antenas, mediante: Δφ= -d 2π λ ⋅ ΔR Nótese que d, únicamente representa un factor 1 ó 2, dependiendo del modo de actuación del InSAR, en el caso de InSAR de pasada doble o en el caso de que se el modo dual 43 9.5. Ejemplo tridimensional: SAR Interferométrico • Procesado: Ejemplo Volcán Kīlauea (uno de los volcanes más grandes del planeta y uno de los cinco volcanes que forman la isla de Hawai)) Data acquired on April 13, 1994 and on October 4, 1994 from the X-band Synthetic Aperture Radar on board the space shuttle Endeavour were used to generate interferometric fringes, which were overlaid on the X-SAR Diferencias de fase: Interferograma DTM superpuesto con Imagen SAR Tecnología de Comunicaciones Inalámbrica ((TCI TCI)) 2012--2013 2012 TEMA 9. Radar Juan Carlos Crespo [email protected] 45