TRANSMISION POR ENGRANAJES
En casi toda máquina que pueda imaginarse habrá
transmisión de movimiento de rotación de un eje a
otro. Los engranajes o ruedas dentadas constituyen
uno de los mejores medios disponibles para transmitir
este movimiento.
Un conjunto de dos o más engranajes que transmite el
movimiento de un eje a otro se denomina tren de
engranajes. Los engranajes se utilizan sobre todo para
transmitir movimiento giratorio, pero usando
engranajes apropiados y piezas dentadas planas
pueden transformar movimiento alternativo en
giratorio y viceversa.
Documento elaborado por I.M. Luis Alberto Cuartas Pérez 2008
Engranajes de dientes rectos:
tienen forma cilíndrica y
funcionan sobre ejes paralelos.
•Cremallera recta: un
engrane recto que tiene
dientes rectos los cuales
forman ángulos rectos con
la
dirección
del
movimiento.
Documento elaborado por I.M. Luis Alberto Cuartas Pérez 2008
•Engranes helicoidales: Los
dientes forman un ángulo con
respecto al eje del engranaje.
Los ejes son paralelos cuando
uno de los engranajes está
tallado en sentido derecho y el
otro en sentido izquierdo.
Generan fuerzas axiales sobre
los ejes.
•Engranajes bihelicoidales
o espina de pescado. Cada
uno de los engranajes tiene
tallados
los
dientes
helicoidales a derecha e
izquierda.
Documento elaborado por I.M. Luis Alberto Cuartas Pérez 2008
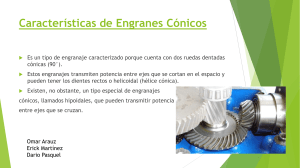
•Engranajes cónicos. Tienen
forma cónica y operan sobre
ejes que se intersectan y
generalmente se instalan
formando ángulos de 90º.
Pueden ser parejas de dientes
rectos o dientes helicoidales.
* Engranajes hipoidales.
Su forma geométrica se
asemeja a los engranajes
cónicos
de
dientes
helicoidales,
pero
formando una curvatura
especial. Sus ejes no se
intersectan.
Documento elaborado por I.M. Luis Alberto Cuartas Pérez 2008
•Engranaje de tornillo sinfín-corona. Un tornillo sin fin se
acopla a un engrane. A estos sistemas se les dice
autobloqueantes, porque solamente se mueven cuando se acciona
el tornillo.
Documento elaborado por I.M. Luis Alberto Cuartas Pérez 2008
Documento elaborado por I.M. Luis Alberto Cuartas Pérez 2008
REDUCTOR DE
VELOCIDAD DE DOBLE
REDUCCIÓN CON
ENGRANES
CONICOHELICOIDALES
Y HELICOIDALES
 0
0