5. Extinción en tiempo finito del flujo de Ricci.
Anuncio

Extinción en tiempo finito del flujo de Ricci
Tobias Colding, William P. Minicozzi II
(Notas por Joaquı́n Pérez)
El objetivo de estas notas es probar que el flujo de Ricci sobre una 3-variedad
compacta M 3 se extingue en tiempo finito si M tiene los mismos grupos de homotopı́a π1, π2 , π3 que S3 . De hecho, probaremos la extinción en tiempo finito del flujo
de Ricci en condiciones topológicas más generales: bastará que M sea compacta,
orientable y con π3 (M) 6= 0. La utilidad de la extinción en tiempo finito del flujo de
Ricci estriba en que evita estudiar qué ocurre con dicho flujo cuando t → ∞.
1.
Preliminares topológicos.
A menos que se diga lo contrario, M 3 será una variedad diferenciable1, compacta
y orientable.
Definición 1.1 M se dice prima si no puede escribirse como suma conexa de dos
3-variedades distintas de S3. Toda 3-variedad compacta y orientable se escribe de
forma única (salvo homeomorfismos) como suma conexa de 3-variedades primas
(descomposición prima).
1
Como estamos en dimensión 3, podemos cambiar “topológica” por “diferenciable” en el sentido
siguiente: en cada variedad topológica de dimensión n ≤ 3, existe una única estructura diferenciable
(probado por Randon para n = 1, 2, y por Moise para n = 3). En esta lı́nea: para n > 4, existe una
cantidad finita de estructuras diferenciables distintas en cada variedad topológica compacta; de
hecho, esta cantidad es la misma que la de Sn (Kirby y Siebenman). Por ejemplo, 7 es la dimensión
más baja para la que existen esferas exóticas (hay 28 de ellas, ver
http://www.answers.com/topic/differential-structure
para una tabla con el número de estructuras diferenciables en Sn con n ≤ 18). No se sabe cuántas
estructuras diferenciables admite S4 (la llamada Conjetura de Poincaré diferenciable afirma que
sólo existe una). En Rn sólo hay una estructura diferenciable salvo para n = 4, en cuyo caso hay
una cantidad no numerable.
1
M se dice irreducible si toda 2-esfera embebida en M es borde de una 3-bola. Ser
prima y ser irreducible son conceptos casi equivalentes: De la definición se deduce
que irreducible implica prima. En cuanto al recı́proco, si M es prima no irreducible,
entonces M = S2 × S1 (Proposición 1.4 en Hatcher [6]).
Los grupos de homotopı́a de una variedad M (no necesariamente compacta) se
definen ası́: Fijamos a0 ∈ Sk y p0 ∈ M.
cont.
πk (M, p0 ) = {[α: Sk → M] | α(a0) = p0 },
donde [α] es la clase de homotopı́a de α: Dos aplicaciones continuas α, β: Sk → M
con α(a0) = β(a0) = p0 se dicen homotópicas si existe H: Sk × [0, 1] → M continua
tal que H(·, 0) = α(·), H(·, 1) = β(·), H(a0 , t) = p0 ∀t ∈ [0, 1].
La construcción anterior no depende del punto a0 ∈ Sk ; de hecho, πk (M, p0 ) puede
verse como el conjunto de clases de homotopı́a de aplicaciones continuas f : [0, 1]k →
M que aplican el borde ∂[0, 1]k en p0 (las homotopı́as son entonces relativas a
∂[0, 1]k ). Con este lenguaje, la estructura de grupo es
[f ] ∗ [h] = [f ∗ h]
donde
(f ∗ h)(t1 , . . . , tk ) =
(
f (2t1 , t2, . . . , tk )
0 ≤ t1 ≤ 1/2,
h(2t1 − 1, t2 , . . . , tk ) 1/2 ≤ t1 ≤ 1.
Toda aplicación continua f : M → N entre variedades induce de forma natural un
morfismo a nivel de grupos de homotopı́a:
f∗ : πk (M, p0 ) → πk (N, f(p0 )),
f∗ ([α]) = [f ◦ α], ∀[α] ∈ πk (M, p0 ).
Esta correspondencia f 7→ f∗ es funtorial, es decir (f ◦h)∗ = f∗ ◦h∗ , (1M )∗ = 1πk (M,p0) .
Recogemos algunas propiedades de grupos de homotopı́a:
Si M es contráctil2, entonces πk (M) = {0} ∀k. Esto se aplica a M = Rn .
πk (M1 × M2 , (p1 , p2 )) = πk (M1 , p1 ) × πk (M2, p2 ), y πk (M, p0 ) es abeliano para
cada k > 1 (ver por ejemplo Bott y Tu [1] Proposición 17.1).
2
Una variedad se dice contráctil si es homotópicamente equivalente a un punto. Dos variedades
M, N son homotópicamente equivalentes si entre ellas existe una equivalencia homotópica, es decir
existen aplicaciones continuas f: M → N , h: N → M tales que h ◦ f es homotópica a 1M y f ◦ h
es homotópica a 1N . En particular, πk (M ) = πk (N ) ∀k.
2
(Dependencia del punto base) Si M es arcoconexa, entonces πk (M, p0 ) no depende de p0 , ∀k. Rigurosamente, dados p0 , p1 ∈ M existe un isomorfismo de
grupos entre πk (M, p0 ), πk (M, p1 ) (el razonamiento es el mismo que para π1; ver
por ejemplo [1] pág. 210). Eso no quiere decir que se pueda identificar πk (M)
con el conjunto [Sk , M] de clases de homotopı́a libre de aplicaciones continuas α: Sk → M: eso sólo puede hacerse cuando M sea simplemente conexa;
más concretamente, existe una acción de π1 (M) sobre πk (M) que induce un
cociente πk (M)/π1 (M) biyectivo al espacio [Sk , M] (Proposición 17.6.1 en [1]).
f → M es proyección recubridora, entonces π (E, p
f0 ) = πk (M, π(p
f0 )),
Si π : M
k
∀k ≥ 2 (es consecuencia de la propiedad de levantamiento de aplicaciones
continuas vı́a una proyección recubridora y del hecho de que Sk es simplemente
conexa ∀k ≥ 2; para más detalles, ver [1] Ejemplo 15.5). Por tanto:
• πk (Tn ) = πk (Rn ) = {0} ∀k ≥ 2, n ≥ 1 (Tn es un toro n-dimensional).
• πk (S1 ) = {0} ∀k ≥ 2.
• ∀Σ2 superficie compacta, Σ 6= S2, RP2 ⇒ πk (Σ) = {0} ∀k ≥ 2.
Usando que toda aplicación continua f : M → N es homotópica a una aplicación diferenciable,tenemos que para calcular los grupos de homotopı́a de M
uno puede restringirse a aplicaciones f : [0, 1]k → M diferenciables.
Usando que una aplicación diferenciable f : [0, 1]k → Sn con k < n no puede
ser sobreyectiva (teorema de Sard) y que Sn − {p0 } admite como retracto a Rn ,
se prueba que πk (Sn ) = {0} siempre que k < n (Proposición 17.9 de [1]); esto
también puede verse como consecuencia del Teorema de Hurewicz (abajo).
El grado de aplicaciones continuas f : Sn → Sn produce un isomorfismo de
πn (Sn ) en Z (Proposición 17.10 de [1]). Ası́, πn (Sn ) está generado por [1Sn ].
(Grupos de homotopı́a y adjunción de celdas) Si M es un espacio topológico
n
y f : D → M una aplicación continua del disco cerrado n-dimensional en M,
n
el espacio topológico obtenido adjuntando una n-celda a M vı́a f es M ∪f D ,
n
i.e. el cociente de M ∪˙ D por la relación de equivalencia que identifica cada
n
x ∈ Sn−1 = ∂ Dn con f (x) ∈ M. Entonces, πk (M ∪f D ) = πk (M) ∀k < n − 1,
n
y πn−1 (M ∪f D ) es un cociente de πn−1 (M) (Proposición 17.11 de [1]).
3
(Relación entre los grupos de homotopı́a y los de homologı́a3 ) Si M es arcoconexa, entonces H1 (M) es el abelianizado de π1 (M):
H1 (M) =
π1(M)
,
[π1(M), π1 (M)]
donde [G, G] denota el subgrupo conmutador de un grupo G. La generalización
a grupos de homotopı́a superiores es el siguente enunciado.
Teorema 1.1 (Hurewicz)4 Sea X una variedad arcoconexa5 y k > 1. Si
π1 (M) = π2(M) = . . . = πk−1 (M) = {0} y πk (M) 6= {0}, entonces H1 (M) =
. . . = Hk−1 (M) = {0} y Hk (M) = πk (M).
El cálculo de πk (Sn ) con n ≥ 2 y k ≥ n es en general un problema abierto.
Destacamos algunos casos conocidos:
• π3(S2 ) = Z está generado por la fibración de Hopf π : S3 → S2 , i.e. la
proyección de S3 = {(z, w) ∈ C2 | |z|2 + |w|2 = 1} en S3 / ∼, donde el
cociente es por la acción de S1 sobre S3 dada por eiθ ∗ (z, w) = (eiθ z, eiθ w)
(página 227 de [1]).
• π4(S3 ) = Z2 (pág. 252 de [1]).
• π5(S3 ) = Z2 (pág. 258 de [1]).
• πk (S2 ) = πk (S3) ∀k ≥ 3 (Corolario IV.8.13 en Whitehead [15]).
• πn+1 (Sn ) = Z2 ∀n ≥ 3 (Corolario 4J.4 en Hatcher [7]).
• πk (S4 ) = πk (S7) ⊕ πk−1 (S3) ∀k ≥ 2 (Corolario IV.8.13 en [15]).
• πk (S8 ) = πk (S15) ⊕ πk−1 (S7 ) ∀k ≥ 2 (Corolario IV.8.13 en [15]).
Nosotros adoptaremos la siguiente forma simplificada de la célebre conjetura de
Poincaré6 :
3
No definiremos aquı́ los grupos de homologı́a; hay diversos caminos para ello, como la homologı́a
simplicial y singular, o bien la cohomologı́a de De Rham. En relación con la conjetura de Poincaré,
recordemos que los grupos de homologı́a de Sn son: Hk(Sn ) = {0} si k 6= n, Hn(Sn) = Z.
4
Teorema 17.21 de [1].
5
El teorema es válido para cualquier espacio topológico arcoconexo.
6
La conjetura de Poincaré clásica sólo supone π1 (M ) = 0. En esta lı́nea, si suponemos π1(M ) =
π2 (M ) = {0}, entonces π3(M ) = Z por el Teorema de Hurewicz. La hipótesis π2 (M ) = 0 puede
evitarse con un argumento de flujo de Ricci (esencialmente viene a decir que si aplicamos flujo de
Ricci con cirugı́a a una 3-variedad M en las hipótesis de la conjetura de Poincaré clásica, entonces
a partir de cierto momento todas las componentes en que M se ha descompuesto mediante el flujo
con cirugı́a tienen π2 trivial; ver páginas 30-31 de Morgan y Tian [11]).
4
Conjetura 1.1 (Poincaré) Si M 3 es una variedad compacta, orientable con π1 (M)
= π2 (M) = {0} y π3 (M) = Z, entonces M es homeomorfa a S3 .
Si queremos probar la Conjetura 1.1 vı́a el flujo de Ricci, debemos estudiar la extinción en tiempo finito del flujo de Ricci para una variedad compacta M 3 que
cumpla π1 (M) = π2(M) = {0}, π3(M) = Z. Sin embargo, lo que sigue será cierto en
condiciones más generales: bastará que π3(M) 6= {0}. Colding y Minicozzi destacan
situaciones que implican esto último:
Definición 1.2 M se dice no asférica (nonaspherical) si algún grupo de homotopı́a
πk (M), k > 1, es no trivial.
f de M es contráctil, sabemos que ∀k > 1, π (M) =
Si el recubridor universal M
k
f
πk (M ) = {0}, y por tanto M es asférica. El Teorema de Whitehead asegura
que el recı́proco es cierto (basta que M sea un CW-complejo7 ), luego ser asférica
equivale a tener recubridor universal contráctil. Por ejemplo, S1 , todos los toros Tn
y todas las superficies compactas salvo S2 y RP2 son variedades asféricas.
Proposición 1.1 Sea M 3 una variedad diferenciable, compacta, orientable, prima
y no asférica. Entonces, π3(M) = Z.
Demostración. Tenemos dos opciones, según que M sea o no irreducible. Si M no
es irreducible, entonces M = S2 × S1 luego π3(M) = π3(S2 ) × π3 (S1 ) = Z.
Si M es irreducible, entonces π2(M) = 0 por el Teorema de la esfera8 y π3(M) =
H3 (M) = Z por el Teorema de Hurewicz.
2
Damos otra condición en la que π3 (M) 6= 0:
Proposición 1.2 Sea M 3 una variedad diferenciable, compacta, orientable y con
grupo fundamental finito. Entonces, π2 (M) = 0 y π3 (M) = Z.
f el recubridor universal de M, que es compacto por ser π (M)
Demostración. Sea M
1
finito. Como los recubridores no distinguen los grupos de homotopı́a superiores,
f = 0 y π (M)
f = Z. Primero, H (M)
f es el abelianizado de
basta probar que π2 (M)
3
1
7
Un CW-complejo X es un espacio topológico obtenido mediante adjunción recursiva de celdas
a partir de una colección de puntos (0-esqueleto). Las celdas de dimensión ≤ k de X se llaman el
k-esqueleto de X. Toda variedad diferenciable es un CW-complejo (una demostración en el caso
compacto puede encontrarse en el Teorema 17.19 de [1]).
8
Teorema de la esfera: Si M 3 es una variedad orientable con π2(M ) 6= 0, entonces existe un
2
embebimiento f : S → M cuya clase en π2 (M ) no es cero (ver por ejemplo el Corolario 3.9 en
Hatcher [6]).
5
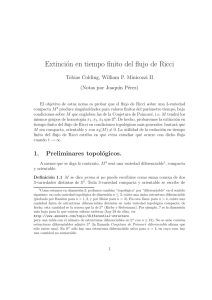
Figura 1: Un sweep-out β en M 3 .
f = 0 y por tanto, H (M)
f = 0. Por ser M
f compacta y orientable, podemos
π1 (M)
1
f implica H (M)
f =
aplicar la dualidad de Poincaré luego la tridimensionalidad de M
2
f = 0. Por el Teorema de Hurewicz, π (M)
f = 0 y π (M
f) = H (M)
f = Z.
H1 (M)
2
2
3
3
Tomemos entonces nuestra variedad M 3 compacta, orientable y con π3 (M) 6= 0.
Consideramos el espacio topológico C 0(S2, M) (con la topologı́a compacto-abierta),
y en éste embebemos topológicamente M mediante las aplicaciones constantes:
J : M → C 0(S2, M),
J (p): S2 → M constante p.
Consideremos el espacio de lazos en C 0(S2 , M) con homotopı́a relativa a J (M):
n
o
π1 C 0(S2 , M), J (M) = [γ: [0, 1] → C 0 (S2 , M)] | γ(0), γ(1) ∈ J (M) ,
donde [γ] denota clase de homotopı́a relativa a J (M) (es decir, las homotopı́as
H: [0, 1] × [0, 1] → C 0 (S2 , M) cumplen H(0, t) = H(1, t) ∈ J (M) ∀t).
Una forma gráfica de imaginar los elementos de π1 (C 0(S2 , M), J (M)) es pensar
en clases de homotopı́a de aplicaciones continuas β: S2 × [0, 1] → M 3 , de forma
que las esferas “inferior” S2 × {0} y “superior” S2 × {1} colapsan en puntos de
M, ver Figura 1 (esto es lo que suele llamarse un sweep-out). Este colapso para
las esferas inferior y superior, y el hecho de que S3 es el cociente de S2 × [0, 1]
identificando S2 × {0} y S2 × {1} a puntos, hace que tengamos una biyección natural
entre π1 (C 0 (S2 , M), J (M)) y π3(M).
Ası́ que siempre que supongamos π3 (M) 6= 0, tendremos una clase de homotopı́a
[β] ∈ π1 (C 0 (S2 , M), J (M)) no trivial. Este será el punto de partida para el siguente
paso, el método de min-max. En éste minimizaremos el funcional energı́a sobre cierto
tipo de aplicaciones valuadas en M, por lo que daremos previamente un rápido repaso
a la energı́a y sus puntos crı́ticos: las aplicaciones armónicas.
6
2.
Energı́a y armonicidad.
A lo largo de esta sección, (M n , g), (N m , g 0 ) denotarán dos variedades Riemannianas. Dada φ ∈ C ∞ (M, N ), la densidad de energı́a de φ es la función
e(φ): M → R,
[e(φ)](p) = kdφp k2 ,
donde kdφp k2 denota la norma al cuadrado de la diferencial de φ en p, vista co0
mo aplicación lineal de (Tp M, gp ) en (Tφ(p), gφ(p)
). La densidad de energı́a e(φ) es
diferenciable sobre M, luego tiene sentido la energı́a de φ, definida como la integral
E(φ) =
Z
e(φ)dA ∈ [0, ∞],
M
donde dA denota el elemento de volumen de (M, g). En lo que sigue supondremos
que φ tiene energı́a finita (esto es gratis si M es compacta, que será nuestra situación
en secciones posteriores; de hecho, M será la esfera S2 y N la 3-variedad en la que
evolucionaremos el flujo de Ricci). Aunque φ no sea una inmersión, hay una forma
natural de generalizar el concepto de segunda forma fundamental mediante
∇dφ: X(M) × X(M) → Xφ (M, N ),
M
(∇dφ)(X, Y ) = ∇N
X (dφ(Y )) − dφ(∇X Y ),
donde X(M), Xφ (M, N ) denotan los espacios de campos diferenciables sobre M y a lo
largo de φ, respectivamente. ∇dφ resulta ser tensorial (y simétrica), luego podemos
localizarla a abiertos y a puntos de M. La tensión de φ es la contracción de la
segunda forma fundamental, luego es un campo a lo largo de φ:
τ (φ) = Traza(∇dφ) =
n
X
(∇dφ)(Ei , Ei ),
i=1
donde {E1 , . . . , En } es una base local g-ortonormal de X(M). Vemamos algunos
ejemplos sencillos:
1. M = (a, b) ⊂ R (ó M = S1 ), N general. En este caso, φ : (a, b) → N es
0
es la derivada covariante en N , y
una curva C ∞ , ∇dφ = ∇∂t (dφ(∂t )) = Dφ
dt
τ (φ) = ∇dφ.
2. M general, N = Rk (con su métrica usual), k ∈ N. Ahora φ = (φ1 , . . . , φk )
con φj ∈ C ∞ (M), luego ∇dφ es el hessiano de φ (valuado en Rk , es decir,
la componente j-ésima de ∇dφ es el hessiano de φj ) y τ (φ) = ∆φ (también
valuado en Rk y entendido por componentes).
7
Volvamos a la situación general. Una variación de φ ∈ C ∞ (M, N ) es una aplicación
F ∈ C ∞ (M × (−ε, ε), N) tal que F (·, 0) = φ(·). El campo variacional de F se define
como
!
∂F
V =
∈ Xφ (M, N ).
∂t (·,0)
La primera fórmula de variación de la energı́a nos dice que en la situación anterior,
la derivada primera de t 7→ E(Ft) es
Z
1 d E(Ft ) = −
g 0 (V, τ (φ)) dA,
2 dt 0
sop(V )
(1)
donde sop(V ) denota el soporte de V , que se supone compacto para que la integral
anterior tenga sentido. Un argumento estándar de densidad y la fórmula (1) nos
llevan a que
φ: M → N es armónica si y sólo si es punto crı́tico de la energı́a para
toda variación con soporte compacto.
Por tanto, de los dos ejemplos explicados arriba deducimos que
1. φ: (a, b) → N es armónica si y sólo si es geodésica de (N, g 0 ).
2. φ: M → Rk es armónica si y sólo si ∆φ = 0.
La armonicidad liga, por tanto, cuestiones puramente geométricas con otras de
las ecuaciones diferenciales. Es por ello que sea una de las herramientas básicas
del Análisis Geométrico. Para poner esto más de manifiesto, destacaremos tres
propiedades que nos serán útiles más adelante.
1 Armonicidad y métricas conformes. Supongamos que M es una superficie
y que g1 , g2 = e2ug1 son dos métricas conformes sobre M, con u ∈ C ∞ (M).
Dada φ ∈ C ∞ (M 2 , N m ), la relación entre bases ortonormales respecto a g1 y
a g2 nos lleva directamente a que
eg2 (φ) = e−2u eg1 (φ),
donde los subı́ndices denotan la métrica respecto de la que se calcula cada
densidad de energı́a. Como la relación entre los elementos de área de g1 , g2 es
dAg2 = e2u dAg1 (aquı́ estamos usando que dim M = 2), tenemos la invarianza
conforme de la integral de Dirichlet:
Eg2 (φ) = Eg1 (φ),
8
De aquı́ se deduce directamente que para superficies, el concepto de armonicidad no depende del representante en la clase conforme métricas de partida.
2 Armonicidad e inmersiones isométricas. Si φ: (M n , g) → (N m , g 0) es una
inmersión isométrica, la ecuación de Gauss nos dice que ∇dφ es la segunda
forma fundamental σ de la inmersión, es decir la parte normal de la conexión
de Levi-Civita de N actuando sobre campos tangentes a M. Tomando trazas,
tenemos
τ (φ) = Traza(σ) = dim M · H,
donde H ∈ X⊥
φ (M, N ) es el campo curvatura media de la inmersión. Por tanto,
para inmersiones isométricas la armonicidad equivale a minimalidad.
3 Armonicidad de aplicaciones S2 → N . Supongamos que M es una superficie
de Riemann y φ: M → (N, g 0 ) una aplicación armónica (por el punto 1 anterior, no hace falta explicitar la métrica en M dentro de la clase conforme
correspondiente a la estructura de superficie de Riemann). Podemos ver (N, g 0 )
embebida isométricamente en un (Rk , g0 ) para algún k ∈ N grande (Teorema
de Nash). Tomemos una coordenada local holomorfa (D, z = x + iy) definida
en un abierto D ⊂ M. Llamando φz = 12 (φx − iφy ), φz = 12 (φx + iφy ) ∈ Ck , se
tiene
(φz , φz )C = |φx |2 − |φy |2 − 2ihφx , φy i,
donde (·, ·)C denota el producto hermı́tico estándar sobre Ck (complexificado
del producto escalar usual h·, ·i en Rk ). (φz , φz )C no está globalmente definida,
pero Ω = (φz , φz )C (dz)2 es una diferencial cuadrática global sobre M. La
armonicidad de φ equivale a que Ω sea holomorfa. En el caso particular M = S2 ,
sabemos que no existen diferenciales cuadráticas holomorfas en S2 salvo la
constante cero, y por tanto |φx|2 = |φy |2 , hφx , φy i = 0, de donde se deduce que
Toda aplicación armónica φ: S2 → N es conforme.
Ahora consideramos en S2 la métrica (posiblemente ramificada) φ∗ g 0, que hace
a φ inmersión isométrica (salvo en sus puntos de ramificación). El punto 2
anterior nos permite enunciar
Toda aplicación armónica φ: S2 → N es una inmersión mı́nima posiblemente ramificada.
9
3.
Anchura de una métrica: el método de minmax.
Fijemos una familia 1-paramétrica y continua de esferas
β : [0, 1] → C 0 ∩ H 1 (S2 , M)
cuyos extremos β(0), β(1) son aplicaciones constantes, tal que la clase de homotopı́a
[β] no es 0 (el sweep-out β existe por los preliminares topológicos). Dado un sweepout γ ∈ [β] y s ∈ [0, 1], γ(s) es una esfera (posiblemente con autointersecciones) en
M y su energı́a respecto de una métrica prefijada g en M es
1
Eg (γ(s)) = E(γ(s)) =
2
Z
S2
kdγ(s)k2 ,
(2)
integral que tiene sentido porque estamos suponiendo γ(s) ∈ H 1 (S2 , M) (espacio de
Sobolev). Nótese que hemos cambiado la definición de energı́a respecto a la sección
anterior en el coeficiente 12 ; este factor de corrección hace que se cumpla
Area(γ) ≤ E(γ),
con igualdad si y sólo si γ es conforme.
(3)
(para la desigualdad anterior, basta notar que el elemento de área kγx ∧ γy kdxdy
cumple 2kγx ∧ γy k ≤ 2kγx k · kγy k ≤ kγx k2 + kγy k2 = kdγk2 con igualdad si y sólo si
γx , γy son ortogonales y de la misma norma).
Como s ∈ [0, 1] 7→ Eg (γ(s)) es continua, existe máxs∈[0,1] Eg (γ(s)). Este máximo
depende de γ ∈ [β]. Minimizando el máximo anterior en γ ∈ [β] definimos la anchura
(width) de g:
W (g) = inf máx E(γ(s)).
(4)
γ∈[β] s∈[0,1]
Podrı́amos definir la anchura con el mismo procedimiento, pero cambiando energı́a
por área. La desigualdad (3) hace que la definición “usando área” sea menor o igual
que la definición “usando energı́a”. La desigualdad contraria también es cierta, y se
sigue de la existencia de coordenadas isotermas (ver detalles en el Apéndice D de
Colding y Minicozzi [4]), luego ambos funcionales producen la misma definición de
anchura. Usaremos esto en la demostración de la Afirmación 5.1.
Colding-Minicozzi definen W (g) cambiando el inf γ∈[β] por mı́nγ∈[β]. Para justificar
este cambio tendrı́amos que probar la existencia de un sweep-out γ ∈ [β] cuya
máxima energı́a coincida con W (g), lo cual no siempre puede hacerse. Sin embargo,
sı́ existirá una colección finita de esferas mı́nimas ramificadas en M cuya suma
10
Figura 2: La anchura W (g) mide el ı́nfimo variando γ ∈ [β] de la energı́a (ó área)
mayor de las esferas γ(s).
de energı́as coincide con W (g), lo cual será suficiente para nuestros propósitos. La
existencia de esta colección de esferas mı́nimas se prueba vı́a el llamado método de
min-max9 . No vamos a explicar rigurosamente este metodo, pero daremos una idea
medianamente extensa de cómo funciona. El método consiste en tomar una sucesión
minimizante {γn }n ⊂ [β], es decir, existe {s(n)}n ⊂ [0, 1] tal que
(
E (γn (s(n))) = máx E(γn (s))
s∈[0,1]
)
& W (g)
n
y probar que podemos construir a partir de {γn (s(n))}n , otra sucesión de sweep-outs
{γ j }j ⊂ [β] y slices esféricos γ j (sj ) que convergen de alguna forma a una esfera (en
realidad, a una colección finita de éstas) cuya energı́a sea W (g) (aquı́ {sj }j es una
sucesión en [0, 1]). La construcción de γ j y sj se hace por etapas:
En una primera etapa hay un proceso recursivo de sustitución de trozos compactos y con borde de γn (s(n)) (en realidad, de cada γn (s) con s ∈ [0, 1])
por aplicaciones armónicas γ j (sj ) del disco D2 en M con los mismos valores
frontera que ese trozo de γn (s(n)). El resultado clave para esta sustitución es
el siguiente, que puede encontrarse en el Lema 4.1.4 del libro de Jost [8]:
Lema 3.1 Sea Ω un dominio acotado 2-dim y BM (p, r) ⊂ M una bola métrica
9
Este método fue originalmente usado por Birkhoff para encontrar geodésicas cerradas en una
esfera S2 con una métrica arbitraria. En el caso de Birkhoff, una dimensión más baja que en nuestra
situación, es posible probar la existencia de una curva de Jordan en S2 cuya energı́a es mı́nima (y
por tanto, es una geodésica cerrada y embebida).
11
centrada en p ∈ M de radio suficientemente pequeño10 . Dada una aplicación
continua ϕ: ∂Ω → BM (p, r) que admita una extensión ϕ: Ω → BM (p, r) con
energı́a finita, existe una aplicación armónica h: Ω → BM (p, r) con h|∂Ω =
ϕ, que minimiza la energı́a de entre todas las aplicaciones con esos valores
frontera. Recı́procamente, todo mı́nimo de la energı́a para este problema de
Cauchy es una aplicación armónica.
Del Lema anterior se deduce que el proceso de sustitución para las γn (s(n))
no aumenta la energı́a, que por tanto seguirá decreciendo en n hacia W (g).
El que cada sustitución pueda hacerse en una bola en M de radio arbitrariamente pequeño hace que tampoco nos salgamos de la clase de homotopı́a [β]
(aunque aumenta el número de sustituciones a hacer). La compacidad de M
y la acotación sobre la energı́a de la nueva sucesión γ j (sj ) permite acotar su
norma H 1 , con lo que un argumento estándar tipo embebimiento compacto
de Rellich permite tomar lı́mite (tras pasar a una parcial) en las γ j (sj ), a una
aplicación u0 ∈ H 1 (S2, M) en la topologı́a débil de este espacio. De nuevo
el Lema anterior y el hecho de que la armonicidad es un concepto local nos
dirá que u0 es una aplicación armónica. Como vimos en la Sección 2, la armonicidad de u0 : S2 → M hace que sea una esfera mı́nima, conforme y posiblemente
ramificada.
La semicontinuidad inferior respecto a la norma Sobolev del funcional energı́a
hace que E(u0) ≤ lı́mj E(γ j (sj )) = W (g). Sin embargo, puede haber una
pérdida de energı́a en el paso al lı́mite. Para que esta pérdida se produzca, debe
haber una acumulación de una cantidad no trivial de energı́a (independiente
de n) en entornos arbitrariamente pequeños de al menos un punto x ∈ S2 .
Tras reescalar dichos entornos intrı́nsecamente se producen nuevas funciones
definidas en discos cada vez mayores, que convergen débilmente en H 1 (R2 ) a
un lı́mite u1 : R2 → M. El que la armonicidad no se pierda por re-escala hace
que u1 sea armónica, y estimaciones para funciones armónicas hacen que la
convergencia anterior sea uniforme sobre compactos de R2. Por construcción,
E(u1 ) > 0 luego u1 no es constante. Además, u1 extiende a ∞ de forma
armónica (como función del espacio de Sobolev de un disco punteado centrado
en ∞, u1 extiende a través de ∞ a una función del espacio de Sobolev en
el disco con su centro; y esta extensión es armónica porque esta propiedad
equivale a cumplir una ecuación elı́ptica cuyos coeficientes extienden a través
π
Explı́citamente, r < mı́n{iM (p), 2κ
} donde iM (p) es el radio de inyectividad de M en p y κ2
es una cota superior de la curvatura seccional de M .
10
12
de ∞). Por último, la aplicación armónica u1: S2 → M es una esfera inmersa,
posiblemente ramificada y mı́nima dentro de M (como en el punto anterior).
Es claro que E(u0 ) + E(u1 ) ≤ W (g), lo que acota la energı́a de u1 por arriba.
Otro ingrediente importante es una acotación de la energı́a de u1 por abajo.
Esto será consecuencia del siguiente enunciado, que puede encontrarse en el
Lema 4.2.1 de [8].
Lema 3.2 Si M es una n-variedad Riemanniana con geometrı́a acotada, existe µ > 0 tal que E(u) ≥ µ, para cualquier esfera inmersa no constante,
mı́nima y ramificada u: S2 → M.
Si E(u0) + E(u1) < W (g) reiteramos el proceso anterior, volviendo a reescalar
desde otros puntos de S2 y encontrando esferas mı́nimas no constantes, posiblemente ramificadas u2 , . . . : S2 → M. Como E(ui ) ≥ µ ∀i ≥ 1 por el Lema
anterior y
X
E(ui ) ≤ W (g)
i≥0
deducimos que este proceso de producción de esferas por re-escala ocurre una
cantidad finita de veces u1 , . . . , uk : S1 → M. El último paso consiste en comprobar que al terminar este proceso finito de blow-up, no hay pérdida de energı́a,
es decir
k
X
E(ui ) = W (g).
(5)
i≥0
Esta igualdad pasa por comprobar que en las regiones anulares de Σ que
“separan” una esfera lı́mite ui de una esfera ui+1 obtenida por blow-up a partir
de ui , no hay pérdida de energı́a tras paso al lı́mite. Este proceso es más técnico
y delicado, y no lo describiremos aquı́; puede encontrarse en detalle en la
Sección 4.3 de [8]. De hecho, todo lo dicho hasta ahora excepto la igualdad (5)
fue probado previamente por Sacks y Uhlenbeck [13] usando una perturbación
del funcional energı́a11,
α
1Z Eα (v) =
1 + kdvk2
2 S
(definido para α > 1 próximo a 1). La igualdad (5) fue probada por Siu y Yau
(Capı́tulo VIII de [14]) independientemente de la prueba citada arriba de Jost.
11
Para α > 1, el funcional α-energı́a Ea cumple las condiciones de Palais-Smale, i.e. toda sucesión
α
{vk }k ⊂ H 1 (S2, M ) tal que {Eα(vk )}k es acotada y dE
(vk ) → 0 tiene una parcial convergente
dt
1 2
en H (S , M ). Con esto se evitan los procesos de blow-up para α > 1, pero luego hay que tomar
α → 1+ para obtener el funcional energı́a.
13
Conviene destacar que en el razonamiento anterior se ha probado implı́citamente que W (g) > 0 y que era necesaria la hipótesis [β] 6= 0 en π1(C 0(S2, M)).
Primero, es claro que si β es nulhomotópica entonces W (g) = 0. Supongamos
entonces que W (g) < µ (µ viene dado por el Lema 3.2). Por el Lema 3.2 no
hay procesos de reescala posibles, y el único lı́mite posible de γ j (sj ) es u0. El
mismo argumento prueba que u0 tiene que ser constante, y se prueba que es
posible pasar de la convergencia de sucesiones γ j (sj ) → cte. a una homotopı́a
entre β y una aplicación constante (página 125 de [8]), lo que contradice que
β no es nulhomotópica.
Para futuras referencias, recogemos todo lo anterior en un enunciado.
Proposición 3.1 (Teorema 4.2.1 en [8]) Dada una métrica g en M 3 y una clase
de homotopı́a no trivial [β] ∈ π1 (C 0 ∩ H 1 (S2 , M)), existe una sucesión de sweep-outs
{γ j : [0, 1] → C 0 ∩ H 1 (S2 , M)}j ⊂ [β], números {sj }j ⊂ [0, 1], m + 1 ≥ 1 esferas
mı́nimas conformes y ramificadas u0 , . . . , um : S2 → M y puntos x1, . . . , xk ∈ S2
tales que
1. W (g) = lı́m máx E(γsj ) = lı́m E(γsjj ) =
j
s∈[0,1]
j→∞
m
X
E(ui ).
i=0
2. ∀i = 1, . . . , m, ui es no constante.
3. γsjj converge a u0 débilmente en H 1 (S2 , M) y uniformemente sobre compactos
de S2 − {x1, . . . , xk }.
4. Para cada i = 1, . . . , m existe ki ∈ {1, . . . , k} y una sucesión de transformaciones conformes Di,j : S2 → S2 (dilataciones centradas en xki ) tales que
{γsjj ◦ Di,j }j → ui.
5. Dado ε > 0, existen j0 ∈ N y δ > 0 tales que si j > j0 y E(γsj ) > W (g) − δ, entonces existen esferas mı́nimas, inmersas y posiblemente ramificadas Σjs,0 , . . . ,
Σjs,m ⊂ M
j
∀j > j0 .
distvarifolds γsj (S2 ), ∪m
i=0 Σs,i < ε
El último apartado anterior merece algunos comentarios. En el artı́culo original de
Colding y Minicozzi [3] aludı́an al survey de min-max de Colding-de Lellis [2] para
probar la propiedad 5, pero no se incluı́a una demostración detallada. Esta falta de
detalles ha hecho necesario un segundo trabajo [4], aparecido recientemente y mucho más extenso que el original. La idea es podemos elegir la sucesión minimizante
14
Figura 3: El apartado 5 de la Proposición 3.1.
de sweep-outs {γ j }j de forma que para cada ε > 0 pequeño, si avanzamos suficientemente en j y si tenemos un slice esférico γsj cuya energı́a es suficientemente
grande12 , entonces la esfera imagen (posiblemente immersa) γsj (S2 ) está muy próxima en términos de ε a una colección de esferas mı́nimas. En cierta forma, 5 nos dice
que le sucesión minimizante {γ j }j se ha elegido eficientemente. Podemos ilustrar
esta eficiencia con un ejemplo una dimensión menor:
Birkhoff ideó el método de min-max para probar la existencia de geodésicas
cerradas en una esfera M 2 con una métrica arbitraria g. Un sweep-out es ahora una
familia continua de curvas cerradas en M 2 (posiblemente inmersas, o cortándose unas
a otras), cuyos valores extremos son dos puntos y que es no trivial en π2(M 2 ) = Z.
Dado un tal sweep-out, calculamos la curva de mayor longitud. La anchura de g
es el valor mı́nimo de estas longitudes maximales, medido en todos los sweep-outs
homotópicos al original. La Figura 3 representa dos sweep-outs en la misma clase
de homotopı́a, cuyas longitudes máximas coinciden con la anchura de g (i.e. con
el valor del min-max). Las curvas negras tienen longitud ≤ que la curva roja en
cada caso, y las longitudes de ambas curvas rojas son ambas W (g). Sin embargo, las
curvas negras de la derecha tienen longitud mucho mayor que las correspondientes
a la izquierda; en ese sentido, el sweep-out de la derecha es menos eficiente que el
de la izquierda. La diferencia entre ambos sweep-outs es que las curvas negras a la
derecha, aunque tengan longitud próxima a W (g), no han de estar cerca de ninguna
geodésica, pero esta propiedad sı́ la tienen las curvas negras de la izquierda.
Volvamos a nuestra situación tridimensional. El enunciado de 5 contiene muchos
detalles técnicos, alguno de los cuales explicamos brevemente.
12
Es decir, la energı́a es suficientemente próxima a W (g).
15
Una 2-varifold (omitiremos el 2) es una medida finita y no negativa en la
Grassmanniana G2 (M) de 2-planos no orientados en M. Es la generalización
conveniente del concepto de superficie a la teorı́a de la medida, donde las
propiedades de compacidad son buenas. El conjunto V de varifolds en M tiene
una topologı́a débil natural: Una sucesión {Vk }k ⊂ V converge a una varifold
V∞ ∈ V si
lı́m
Z
k→∞ G2 (M )
f dVk =
Z
G2 (M )
f dV∞ ,
∀f ∈ C00(G2 (M)).
Toda varifold V ∈ V define una medida kV k sobre M (llamada la masa de V ),
mediante
Z
Z
h dkV k =
(h ◦ π)dV,
∀h ∈ C00(M).
G2 (M )
M
Ası́, podemos ver la masa de V como una generalización del funcional área.
La generalización de superficie mı́nima al lenguaje de varifolds es el concepto
de varifold estacionaria. Una varifold V ∈ V se dice estacionaria si es punto
crı́tico del funcional masa para variaciones con soporte compacto. De forma
más precisa,
d 0 = k(ϕt )] V k
∀X ∈ X0(M),
dt t=0
donde ϕt: M → M es el grupo uniparamétrico de difeomorfismos asociado al
campo X, y dado un difeomorfismo ϕ de M, ϕ] V ∈ V es el pushforward de V
mediante ϕ, es decir
Z
G2 (M )
f d(ϕ] V ) =
Z
G2 (M )
f (ϕ, dϕ)|Jacϕ|dV,
∀f ∈ C00(G2 (M)).
Por tanto, si V ∈ V está inducida por una superficie, entonces la fórmula
de cambio de variables nos dice que ϕ] V es la varifold correspondiente a la
superficie ϕ(V ).
Dado C > 0, sean
V(C) = {V ∈ V | kV k ≤ C},
M(C) = {V ∈ V(C) | V es estacionaria}.
V(C) es un compacto de V y es metrizable. Llamemos distvarifolds a una distancia en V(C) que genere su topologı́a.
Ya podemos entender el enunciado del apartado 5 de la Proposición 3.1 y
parte de su demostración: tenı́amos una sucesión de sweep-outs {γ j }j ⊂ [β],
16
cuya área podemos suponer uniformemente acotada (por la desigualdad (3) y
porque E(γsjj ) & W (g)). Si avanzamos suficientemente en j y tenemos un slice
esférico γsj con E(γsj ) > W (g) − δ, en particular γsj (S2 ) cae en un V(C) para
cierto C > 0 independiente de j y de s. En tales condiciones, la Proposición
4.1 en [2] asegura que tras posiblemente una sustitución de nuestra sucesión
de sweep-outs {γ j }j por otra que conserva las mismas propiedades 1,2,3,4 de
la Proposición 3.1 (y que esencialmente reduce el área de los slices esféricos
sin variar la condición de formar parte de una sucesión minimimizante de
sweep-outs), podemos asegurar que
distvarifolds {γsj (S2)}j , M(C) → 0
cuando j → ∞.
Y ya sólo quedarı́a justificar que la distancia anterior al conjunto M(C) se
puede aproximar por distancia de γsj (S2 ) a una colección de esferas mı́nimas,
inmersas y ramificadas Σjsj ,0 , . . . , Σjsj ,m ⊂ M. No entraremos en detalles sobre
esto, ver Proposición 4.1 en [2] y también [4].
Uno podrı́a preguntarse porqué usar varifolds y topologı́as débiles si estábamos
usando superficies (esferas) dentro de M 3 . La razón es que tendremos que controlar
una integral del tipo
Z
[ρ − RicM (N )]
Σ
para cierta superficie Σ ⊂ M, siendo ρ la curvatura escalar de M y RicM (N ) la
curvatura de Ricci de M evaluada en el normal unitario a Σ. Esencialmente, tendremos saber que si dos superficies Σ, Σ0 ⊂ M son “próximas” en algún sentido,
entonces las correspondientes integrales como la anterior son también próximas (ver
ecuaciones (18) y (19)). El integrando anterior puede verse como una función en
el fibrado tangente a Σ, que es un subconjunto de la Grassmanniana G2 (M), y la
topologı́a débil es la adecuada para que las integrales anteriores esten “próximas”.
4.
Preliminares sobre flujo de Ricci.
De ahora en adelante, supondremos que g(t) es una familia C ∞ de métricas
Riemannianas en M que cumplen
∂tg = −2 RicM (t).
(6)
La ecuación de evolución de la curvatura escalar ρ = ρ(t, x) de (M, g(t)) es (pág 16
de Hamilton [5]):
2
∂tρ = ∆ρ + 2|Ric|2 ≥ ∆ρ + ρ2 ,
(7)
3
17
donde |Ric|2 es la norma al cuadrado del tensor de Ricci y en la desigualdad anterior
se usa la desigualdad de Schwarz en el espacio de matrices simétricas de orden 3
sobre I3, Ric(·, ·).
Lema 4.1 (Estimación de la curvatura escalar) Existe C > 0 que sólo depende de g(0) tal que
3
ρ(t, ·) ≥ −
.
(8)
2(t + C)
Demostración. Fijemos x = x(t) ∈ M un mı́nimo de ρ(t, ·), que existe por ser M
∂ρ
(t, x(t)) + ∂x
(t, x(t))x0(t).
compacta. Sea f (t) := ρ(t, x(t)). Entonces, f 0 (t) = ∂ρ
∂t
Como ρ(t, ·) tiene un mı́nimo en x(t), el segundo sumando anterior se anula y
(∆ρ)(x(t), t) ≥ 0. Por tanto,
f 0 (t) =
(7)
∂ρ
2
2
(t, x(t)) ≥ (∆ρ)(x(t), t) + f 2 (t) ≥ f 2 (t).
∂t
3
3
En particular, f es no decreciente. Como el miembro de la derecha de (8) es negativo
independientemente de C, el Lema se tiene trivialmente si f ≥ 0 (ya que ρ(t, ·) ≥
f (t) ≥ 0), luego podemos suponer que f < 0.
Reescribimos f 0 ≥ 23 f 2 como (1/f)0 ≤ − 23 . Integrando en [0, t],
1
2
1
−
≤ − t,
ρ(t, x(t)) ρ(0, x(0))
3
de donde
ρ(t, ·) ≥ ρ(t, x(t)) ≥
1
1
ρ(0,x(0))
−
2
t
3
=−
3
.
2(t + C)
3
> 0, luego el lema está probado.
Nótese que C = − 2ρ(0,x(0))
2
Sea Σ ⊂ M 3 una superficie compacta, no necesariamente mı́nima. Usando (6) y un
argumento en las págs 38-41 de [5], tenemos
d Areag(t)(Σ) = −
dt 0
Z
Σ
[ρ − RicM (N )].
(9)
Por definición de curvatura escalar, 12 ρ = KM (T Σ) + RicM (N ), donde KM (T Σ) es la
curvatura seccional ambiente sobre cada plano tangente a Σ. Si queremos relacionar
KM (T Σ) con la curvatura intrı́nseca KΣ (para después usar Gauss-Bonnet), usaremos la ecuación de Gauss KΣ = k1 k2 + KM (T Σ), donde k1 , k2 son las curvaturas
18
principales de Σ. Si suponemos Σ mı́nima (sólo usaremos la minimalidad de Σ para
g(0); (Σ, g(t)) podrı́a evolucionar a una superficie no mı́nima), entonces k1 = −k2
luego KΣ = − 12 |A|2 + KM (T Σ). Por tanto, ρ − RicM (N ) = 2KM (T Σ) + RicM (N ) =
KM (T Σ) + 12 ρ = KΣ + 12 |A|2 + 12 ρ luego
d Areag(t)(Σ) = −
dt 0
Z
Σ
1
2
KΣ −
Z
[|A|2 + ρ].
(10)
Σ
Lema 4.2 (Fórmula de Gauss-Bonnet con puntos de ramificación)
Sea Σ una superficie compacta y g 0 una métrica en Σ −{p1 , . . . , pk } con ramificación
de orden bj en pj , i.e. si (D, z) es una coordenada local centrada holomorfa centrada
en pj , entonces g 0 = |z|2bj ds20 , siendo ds20 una métrica Riemanniana en D. Entonces,
Z
K 0 dA0 = 2π χ(Σ) +
Σ
k
X
j=1
bj .
Demostración. Extendiendo cada métrica ds20 alrededor de pj a una métrica Riemanniana g sobre Σ (usar particiones de la unidad) podemos escribir g 0 = e2u g
donde u ∈ C ∞(M − {pj }j ). Tomemos discos Dj (R) de “radio” R alrededor de pj de
forma que lı́mR→0 Dj (R) = {pj }. Usando que K 0e2u = K − ∆u, tenemos
Z
K 0 dA0 =
Σ−∪j Dj (R)
Z
K 0e2u dA =
Z
Σ−∪j Dj (R)
K dA −
Σ−∪j Dj (R)
Z
∆u dA.
Σ−∪j Dj (R)
Tomando R → 0 y aplicando la fórmula de Gauss-Bonnet a (Σ, g) tenemos
Z
0
0
K dA = 2πχ(Σ) − lı́m
Z
R→0 Σ−∪j Dj (R)
Σ
∆u dA = 2πχ(Σ) −
k
X
j=1
lı́m
Z
R→0 {|z|=R}
∂u
ds.
∂η
Si escribimos z = reiθ , la última integral es
Z
{|z|=R}
∂u
ds = −
∂η
Z
2π
0
∂u
R dθ.
∂r
Pero eu = |z|bj luego u = bj log r y
−
Z
2π
0
∂u
R dθ = −
∂r
Z
2π
0
bj
R dθ = −2πbj .
R
2
19
Lema 4.3 (Estimación del área de esferas mı́nimas) Si (Σ, g(0)) ⊂ M 3 es una
esfera mı́nima ramificada, entonces
d 1
Areag(t)(Σ) ≤ −4π − Areag(0)(Σ) mı́n ρ(0).
M
dt 0
2
(11)
Demostración. Usando (10) y la fórmula de Gauss-Bonnet para (Σ, g(0)),
X
d 1
Areag(t)(Σ) = −2π χ(Σ) +
bj −
dt 0
2
j
Z
[|A|2 + ρ]
Σ
Ahora basta estimar bj ≥ 0, |A|2 ≥ 0 y ρ ≥ mı́nM ρ.
5.
2
Extinción en tiempo finito del flujo de Ricci.
Teorema 5.1 (Desigualdad diferencial para la función anchura)
d
3
W (g(t)) ≤ −4π +
W (g(t)),
dt
4(t + C)
(12)
donde C > 0 depende de la métrica inicial g(0).
Nota 5.1 La función t 7→ W (g(t)) podrı́a no ser diferenciable; la desigualdad (12)
se entiende en el sentido siguiente:
lı́m sup
h→0+
3
W (g(t + h)) − W (g(t))
≤ −4π +
W (g(t)).
h
4(t + C)
Demostración. Fijo un tiempo τ . Sea {γ j (τ ) : [0, 1] → C 0 ∩H 1 (S2 , M)}j una sucesión
de sweep-outs para g(τ ) dadas por la Proposición 3.1, todos en la clase de homotopı́a
no trivial [β] ∈ π1 (C 0 ∩ H 1 (S2, M)). Recordemos que denotamos γsj (τ ) = [γ j (τ )](s),
s ∈ [0, 1]. Llamamos {sj }j a la sucesión que aparece en la Proposición 3.1, en
particular
(A) W (g(τ )) = lı́mj Eg(τ )(γsjj (τ )).
20
b > 0 tales que si j > j y 0 < h < h,
b
Afirmación 5.1 Dado ε > 0, ∃j1 ∈ N y h
1
entonces
Areag(τ +h)(γsj (τ )) − máx Eg(τ )(γsj (τ )) ≤
s∈[0,1]
!
3
máx Eg(τ ) (γsj (τ )) h + C 0h2
−4π + C ε +
4(τ + C) s∈[0,1]
0
(13)
(con C, C 0 > 0 independientes de j, ε), siendo s un valor arbitrario en [0, 1].
Asumiendo la afirmación, probamos (12). Para cada j ∈ N fijo, puedo usar el sweepb (respecto a la
out γ j (τ ) ∈ [β] para calcular la anchura de g(τ + h) con h ∈ (0, h)
clase [β]):
(14)
W (g(τ + h)) ≤ máx Areag(τ +h) (γsj (τ ))
s∈[0,1]
(Nótese que hemos cambiado energı́a por área en el miembro de la derecha, pero
vimos que no habı́a problema al hacer esto). Por tanto,
W (g(τ + h)) − máx Eg(τ )(γsj (τ )) ≤ máx Areag(τ +h) (γsj (τ )) − máx Eg(τ )(γsj (τ ))
s
s∈[0,1]
(13)
≤
s
!
3
máx Eg(τ )(γsj (τ )) h + C 0 h2 (15)
−4π + C ε +
4(τ + C) s∈[0,1]
0
Pero W (g(τ )) = lı́mj máxs∈[0,1] Eg(τ )(γsj (τ )), luego de (15) deducimos
!
3
W (g(τ + h)) − W (g(τ )) ≤ −4π + C 0ε +
lı́m máx Eg(τ ) (γsj (τ )) h + C 0h2
4(τ + C) j s∈[0,1]
!
3
0
W (g(τ )) h + C 0h2
= −4π + C ε +
(16)
4(τ + C)
Dividiendo por h > 0 en (16) y tomando h → 0+ tendremos
3
d W (g(τ ))
W (g(t)) ≤ −4π + C 0ε +
dt t=τ
4(τ + C)
Por último, tomando ε → 0 (recordemos que C, C 0 no dependen de ε) terminamos
la demostración del Teorema.
2
Demostración de la Afirmación 5.1. El argumento se divide en dos casos, según que
Eg(τ ) (γsj (τ )) esté “lejos o cerca” de W (g(τ )). Este “lejos o cerca” se mide en términos
del δ > 0 que aparece en la Proposición 3.1.
21
Rigurosamente, la Proposición 3.1 aplicada a (M, g(τ )) y a la clase [β] ∈ π1(C 0 ∩
H 1 (S2 , M)) − {0} en la que estamos calculando anchuras, existen una sucesión de
sweep-outs {γ j (τ ) : [0, 1] → C 0 ∩ H 1 (S2 , M))}j ⊂ [β], otra de números {sj }j ⊂ [0, 1],
m + 1 esferas mı́nimas, conformes y ramificadas u0 (τ ), . . . , um (τ ): S2 → M y puntos
x1 (τ ), . . . , xk (τ ) ∈ S2 (tanto m como k dependen de τ ) tales que
1. W (g(τ )) = lı́mj máxs∈[0,1] Eg(τ )(γsj (τ )) = lı́mj Eg(τ )(γsj (τ )) =
Pm
i=0
Eg(τ )(ui (τ )).
2. ∀i = 1, . . . , m, ui es no constante.
3. γsjj (τ ) converge débilmente a u0 (τ ) en H 1,2 (S2 ) y uniformemente sobre compactos de S2 − {x1 (τ ), . . . , xk (τ )}.
4. Para cada i = 1, . . . , m existe ki ∈ {1, . . . mk } y una sucesión de transformaciones conformes Di,j (τ ) : S2 → S2 (dilataciones centradas en xki (τ )) tales que
{γsjj (τ ) ◦ Di,j (τ )}j → ui (τ ).
5. Dado ε > 0, existen j0 = j0 (τ, ε) ∈ N y δ = δ(τ, ε) > 0 tales que si j > j0
y Eg(τ )(γsj (τ )) > W (g(τ )) − δ, entonces existen esferas mı́nimas, conformes y
ramificadas Σjs,0 (τ ), . . . , Σjs,m (τ ) ⊂ M tales que
j
distvarifolds γsj (τ ), ∪m
i=0 Σs,i (τ ) < ε
∀j > j0 .
(17)
Aplicaremos la propiedad 5 anterior al ε > 0 para el que queremos probar la Afirmación 5.1. Fijamos j > j0 y s ∈ [0, 1]. Estudiamos separadamente los dos casos
siguientes.
Eg(τ ) (γsj (τ )) ≤ W (g(τ )) − δ.
Eg(τ ) (γsj (τ )) > W (g(τ )) − δ.
El caso más sencillo es el primero, ya que no usa las esferas mı́nimas Σjs,0 (τ ), . . . , Σjs,m (τ ):
i
(a) h
Areag(τ +h) (γsj (τ )) ≤ Eg(τ +h) (γsj (τ )) ≤ Eg(τ +h)(γsj (τ )) − Eg(τ )(γsj (τ )) + W (g(τ )) − δ
(b) h
i
≤ Eg(τ +h) (γsj (τ )) − Eg(τ )(γsj (τ )) + máx Eγ(τ ) (γsj (τ )) − δ
s∈[0,1]
donde en (a) hemos usado la desigualdad que define este caso y en (b) la definición
de anchura de g(τ ). El primer sumando (entre corchetes) del miembro de la derecha
22
b
anterior depende continuamente de h, luego puede hacerse < δ2 tomando h ∈ (0, h)
b > 0). Pasando el segundo sumando de la derecha al
(tras achicar posiblemente h
otro miembro, tenemos
δ
Areag(τ +h) (γsj (τ )) − máx Eγ(τ )(γsj (τ )) ≤ − ,
s∈[0,1]
2
que implica la desigualdad de la Afirmación 5.1 en este primer caso, de nuevo tomanb más pequeño si fuera necesario.
do h
Ahora atacamos el segundo caso, Eg(τ )(γsj (τ )) > W (g(τ )) − δ, luego γsj (τ ) es muy
j
próxima en el sentido de varifolds a la colección de esferas mı́nimas ∪m
i=0 Σs,i (τ ), en el
j
sentido de (17). Usando (9) con Σ = γsj (τ ) y después con Σ = ∪m
i=0 Σs,i (τ ), tenemos
d Areag(t)(γsj (τ )) = −
dt t=τ
Z
d j
m
Area
∪
Σ
(τ
)
=−
g(t)
i=0 s,i
dt t=τ
γsj (τ )
[ρ − Ricg(τ )(Nγsj (τ ))],
Z
j
∪m
i=0 Σs,i (τ )
[ρ − Ricg(τ )(N∪m
j
i=0 Σs,i (τ )
(18)
)].
(19)
j
< ε hace que los miembros de la derecha
El que distvarifolds γsj (τ ), ∪m
i=0 Σs,i (τ )
en (18) y (19) disten en valor absoluto menos que C 0εkRicg(τ )kC 1 Area(γsj (τ )), para
cierta constante C 0 = C 0(τ ) > 0.
Por otro lado, aplicando a cada una de las esferas mı́nimas Σjs,i (τ ) el Lema 4.3
(tenemos m + 1 ≥ 1 de ellas), obtenemos
1
d j
j
m
Area
Areag(t) ∪m
Σ
(τ
)
≤
−4π(m
+
1)
−
∪
Σ
(τ
)
mı́n ρ(τ, ·)
g(τ
)
i=0 s,i
i=0 s,i
M
dt t=τ
2
1
j
≤ −4π − Areag(τ ) ∪m
i=0 Σs,i (τ ) mı́n ρ(τ, ·)
M
2
1
j
(20)
= −4π − Eg(τ ) ∪m
i=0 Σs,i (τ ) mı́n ρ(τ, ·),
M
2
donde en la última igualdad hemos usado que cada Σjs,i (τ ) es conforme. Volviendo
j
j
a relacionar el término Eg(τ )(∪m
i=0 Σs,i (τ ) con Eg(τ )(γs (τ )) cometemos de nuevo un
error menor que Cε. Reuniendo entonces (18), (19) y (20), tenemos
d 1
Areag(t)(γsj (τ )) ≤ −4π − Eg(τ )(γsj (τ )) mı́n ρ(τ, ·) + C 0ε.
M
dt t=τ
2
23
Por el Lema 4.1, existe C > 0 que sólo depende de g(0) tal que ρ(τ, ·) ≥ − 2(τ 3+C) en
M y por tanto el mı́nimo de ρ(τ, ·) también cumple la misma desigualdad. Ası́,
d 3
Eg(τ )(γsj (τ )) + C 0ε
Areag(t)(γsj (τ )) ≤ −4π +
dt t=τ
4(τ + C)
3
máx Eg(τ )(γsj (τ )) + C 0 ε.
≤ −4π +
s∈[0,1]
4(τ + C)
(21)
Usando un desarrollo en serie de Taylor13 de la función h 7→ Eg(τ +h) (γsj (τ )) alrededor
b para cierto h
b > 0 independiente de j > j y
de h = 0 en un intervalo del tipo [0, h)
0
de s, se consigue la desigualdad deseada en este segundo caso.
2
Corolario 5.1 En una variedad diferenciable, compacta, orientable, prima y no
asférica, el flujo de Ricci se extingue en tiempo finito.
Demostración. Con la notación anterior,
d
dt
W (g(t))
(t + C)3/4
!
=
(12)
3
1
−4π
d
W
(g(t))
−
W
(g(t))
≤
.
(C + t)3/4 dt
4(C + t)7/4
(t + C)3/4
Integrando en [0, T ],
W (g(T ))
W (g(0))
≤
− 16π[(T + C)1/4 − C 1/4].
3/4
(T + C)
C 3/4
(22)
Como W (g(T )) ≥ 0, la desigualdad (22) lleva a contradicción para T suficientemente
grande.
2
El argumento anterior puede rehacerse si M 3 no es prima, siempre que los factores
en su descomposición prima estén en las condiciones del corolario anterior (para
detalles, ver la Sección 1.5 de Perelman [12] o la Sección 4 de Colding-Minicozzi [3]):
Corolario 5.2 El flujo de Ricci se extingue en tiempo finito en toda 3-variedad
compacta, orientable, cuya descomposición prima no tenga factores asféricos.
13
La regularidad necesaria para este desarrollo en serie se tienen porque h 7→ Eg(τ +h) (γsj (τ )) es
una función C 2 con una cota uniforme hasta la segunda derivada, independiente de j, s cerca de
h = 0; esto sale de que las métricas g(t) varı́an de forma C ∞ , y todo sweep-out γj tiene energı́a
uniformemente acotada.
24
Corolario 5.3 Si M 3 es compacta, orientable y reducible, entonces los factores en
su descomposición prima se separan en tiempo finito al evolucionar según el flujo de
Ricci.
Demostración. (Esquema). Sea N 3 un factor no trivial en la descomposición prima
de M. Entonces, existe una S2 en N que no es borde de una B3 en M. De aquı́ se
puede deducir la existencia, para cada t, de una esfera S2 (t) que minimiza el área
en la clase de isotopı́a de la anterior dentro del ambiente (M, g(t)) (Meeks, Simon y
Yau [9]). Aplicando el argumento en la demostración del Teorema 5.1 es esta esfera
S2 (t), tendremos que Area(S2 (t), g(t)) va a cero en tiempo finito, lo que demuestra
el corolario.
2
Referencias
[1] R. Bott and L. W. Tu. Differential forms and Algebraic Topology. SpringerVerlag, New York, 1982.
[2] T. H. Colding and C. De Lellis. The min-max construction of minimal surfaces.
J. of Differential Geometry, pages 75–107, 2003.
[3] T. H. Colding and W. P. Minicozzi II. Estimates for the extinction time for the
Ricci flow on certain 3-manifolds and a question of Perelman. Journal of the
AMS, 18:347–559.
[4] T. H. Colding and W. P. Minicozzi II. Width and finite extinction time of Ricci
flow. Preprint arXiv:0707.0108.
[5] R. S. Hamilton. The formation of singularities in the Ricci flow. In Surveys
in differential geometry, Vol. II (Cambridge, MA 1993),, pages 1–119. International Press, Cambridge, MA, 1995.
[6] A.
Hatcher.
Notes
on
basic
3-manifold
www.math.cornell.edu/hatcher/3M/3Mdownloads.html.
topology.
[7] A. Hatcher. Algebraic Topology. Number 72. Cambridge University Press, 2002.
ISBN-10: 0521795400.
[8] J. Jost. Two-dimensional geometric variational problems. J. Wiley and Sons,
Chichester, N.Y., 1991.
25
[9] W. H. Meeks III, L. Simon, and S. T. Yau. The existence of embedded minimal
surfaces, exotic spheres and positive Ricci curvature. Annals of Math., 116:221–
259, 1982. MR0678484, Zbl 0521.53007.
[10] M. Micallef and J. D. Moore. Minimal two-spheres and the topology of manifolds with positive curvature on totally isotropic two-planes. Annals of Math.,
127:199–227, 1988.
[11] J. W. Morgan and G. Tian. Ricci flow and the Poincare Conjecture. 2006.
[12] G. Perelman. Finite extinction time for the solutions to the Ricci flow on certain
three-manifolds. math.DG/0307245.
[13] J. Sacks and K. Uhlenbeck. The existence of minimal immersions of two-spheres.
Annals of Math., 113:1–24, 1981.
[14] R. Schoen and S. T. Yau. Lectures on harmonic maps. International Press,
1997.
[15] G. W. Whitehead. Elements of homotopy theory. Springer-Verlag, New York,
1978.
26