MC Laura Jiménez Beristáin CODIGO DE MATLAB 1
Anuncio

UABC
MODELADO DE SISTEMAS DINAMICOS
CODIGO DE MATLAB
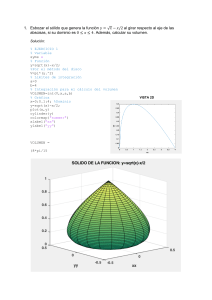
1. EJEMPLO No. 1
%Ejercicio No.1
%-------------------------------------%Se utiliza la ecuacion caracteristica de los sistemas de segundo orden en
%un ejemplo y se obtienen sus graficas correspondientes de los casos:
%subamortiguado, no amortiguado, sobreamortiguado y criticamente
%amortiguado
%-------------------------------------close all, clear, clc
t=0:0.001:20;
zi=0.1;
%tiempo en (segundos)
%factor de amortiguamiento: 0<z<1. Caso 2) SUBAMORTIGUADO.
%Raices complejas y conjugadas
wn=3;
%frecuencia natural (rad/seg). Magnitud fasorial
th=20;
%angulo de fase (grados). Fase de un fasor, leida conforme
%a las manecillas del reloj desde 180.
for i=1:9,
z=zi*i;
y(i,:)=1-(exp(-z.*wn*t)/sqrt(1-z^2)).*sin(wn.*sqrt(1-z^2)*t+th);
end
plot(t,y), title('Caso SUBAMORTIGUADO');
legend('z(0.1)','z(0.2)','z(0.3)','z(0.4)','z(0.5)','z(0.6)','z(0.7)','z(0.8)','z(0.9)');
%-------------------------------------z=0;
%factor de amortiguamiento: z=0. Caso 1)NO AMORTIGUADO
%Raices imaginarias
figure
y=1-(exp(-z.*wn*t)/sqrt(1-z^2)).*sin(wn.*sqrt(1-z^2)*t+th);
subplot(211)
plot(t,y), title('NO AMORTIGUADO, utilizando sol.Subamortiguada');
y=1-cos(wn.*t);
subplot(212)
plot(t,y), title('NO AMORTIGUADO, utilizando sol.No amortiguada');
%--------------------------------------z=2;
%factor de amortiguamiento: z>1. Caso 4) SOBRE AMORTIGUADO
%Raices reales y diferentes
figure
y=1-(exp(-z.*wn*t)/sqrt(1-z^2)).*sin(wn.*sqrt(1-z^2)*t+th);
M.C Laura Jiménez Beristáin
Pag. 1
UABC
MODELADO DE SISTEMAS DINAMICOS
plot(t,y)
% r1=-z*wn+wn*sqrt(z^2-1);
% r2=-z*wn-wn*sqrt(z^2-1);
% b=1;
% figure
% y=1-b*((exp(-r2.*t)/r2)-(exp(-r1.*t)/r1));
plot(t,y), title('SOBRE AMORTIGUADO, utilizando sol.Subamortiguada');
%--------------------------------------z=1;
%factor de amortiguamiento: z=1. Caso 3) CRITICAMENTE AMORTIGUADO
%Raices reales y diferentes
figure
y=1-(exp(-z.*wn*t).*(1+wn.*t));
%y=1-(exp(-z.*wn*t)/sqrt(1-z^2)).*sin(wn.*sqrt(1-z^2)*t+th); %DIVISION ENTRE CERO
plot(t,y), title('CRITICAMENTE AMORTIGUADO');
%---------------------------------------
2. EJEMPLO No. 2
%Ejercicio No.2
%-------------------------------------%Se emplean las instrucciones del toolbox de control: tf(funcion de transferencia) y step(respuesta
%al escalon), para comparar las respuestas obtenidas en los ejercicios 1 y 2
%-------------------------------------close all, clear, clc
zi=0.1;
%factor de amortiguamiento: 0<z<1. Caso 2) SUBAMORTIGUADO.
%Raices complejas y conjugadas
wn=3;
%frecuencia natural (rad/seg). Magnitud fasorial
th=20;
%angulo de fase (grados). Fase de un fasor, leida conforme
%a las manecillas del reloj desde 180.
figure
hold on
for i=1:9,
z=zi*i;
sys=tf(wn^2,[1 2*z*wn wn^2]);
step(sys)
end
hold off
legend('z(0.1)','z(0.2)','z(0.3)','z(0.4)','z(0.5)','z(0.6)','z(0.7)','z(0.8)','z(0.9)');
%Se puede observar que ambas respuestas son muy similares
M.C Laura Jiménez Beristáin
Pag. 2
UABC
MODELADO DE SISTEMAS DINAMICOS
3. La siguiente función de transferencia representa a un sistema eléctrico:
K
V0 (s )
τ RC
, determinar el valor de C de forma que la
=
Vent (s )
(RC + τ )
(K + 1)
2
s +
s + RC τ
RC τ
función de transferencia tenga una relación de amortiguación de 0.7. Sabiendo
que la constante de tiempo es τ = 1 s, la resistencia R = 50 Ω y la ganancia K=20.
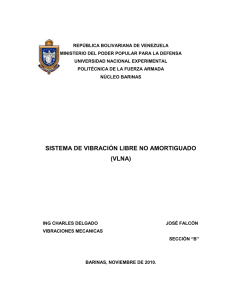
4. EJEMPLO No. 3 . (Ejercicio de tarea de taller)
En la respuesta al escalón de un sistema subamortiguado se encuentran los siguientes
parámetros:
S te p R e s p o n s e
F rom : U (1)
1 .4
1 .2
0 .8
T o: Y(1)
Amplitude
1
0 .6
0 .4
0 .2
0
0
3
6
9
12
15
18
T im e ( s e c . )
Mp =e
Ta =
Tp =
−
3
ζω n
πζ
1−ζ 2
=
Máximo sobreimpulso o sobrepico
3
Tiempo de Asentamiento (±5%)
σ
π
=
π
ωd
ωn 1 − ζ
π −θ
π −θ
=
Tl =
2
ωd
ωn 1 − ζ
2
Tiempo pico
Tiempo de levantamiento o elevamiento
Ejercicio : Obtener Mp, ta, tp, y tl de G (s ) =
9
, utilizando matlab grafique y
s + 2s + 9
2
compare sus resultados con los calculados
1
ωn2= 9, ωn = 3, 2ζωn = 2 , ζ =
3
Mp=0.33=33% , ta = 3 seg, tp= 1.11 seg, θ = 1.23 rad.=70.528o , tl= 0.676 seg
M.C Laura Jiménez Beristáin
Pag. 3