Automatización de una esclusa para pequeñas embarcaciones
Anuncio

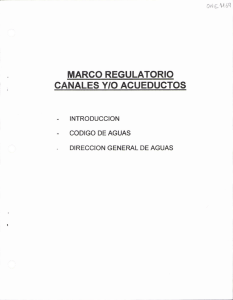
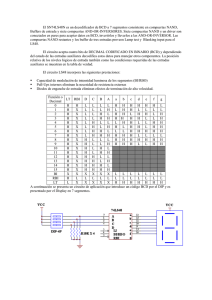
Automatización de una esclusa para pequeñas embarcaciones Argumento Un sistema automatizado controlará las compuertas que comprende una esclusa de una vía navegable para pequeñas embarcaciones. Existirán botones para la apertura de las compuertas y tajaderas de las mismas, que faciliten el tránsito de los pequeños barcos. Composición de la esclusa: ‐ ‐ ‐ Embarcadero superior. Es la parte elevada de la esclusa. En ese lugar el agua tiene su máxima altura. Está limitado por las compuertas superiores. Compuertas superiores. Permiten a las embarcaciones acceder al embarcadero o zona común desde el embarcadero superior. Nunca podrán coincidir abiertas compuertas superiores e inferiores. Tajaderas de compuertas superiores. Son pequeñas compuertas situadas en las compuertas superiores, cuyo cometido es abrir una vía de agua, hacia el embarcadero o zona común. Compuerta Esta pequeña compuerta se llama “tajadera” ‐ ‐ ‐ ‐ Embarcadero o zona común. Es el lugar de unión de los embarcaderos superior e inferior. Se llenará o vaciará de agua, con el propósito de elevar o disminuir las embarcaciones, según sea el tránsito de éstas. Embarcadero inferior. En ese lugar el agua tiene su mínima altura. Está limitado por las compuertas inferiores. Compuertas inferiores. Permiten a las embarcaciones acceder al embarcadero o zona común desde el embarcadero inferior. Nunca podrán coincidir abiertas compuertas superiores e inferiores. Tajaderas de compuertas inferiores. De igual características a las mostradas para las compuertas superiores. Funcionamiento, para un desplazamiento del embarcadero superior, al inferior 1. Primera condición, se consideran las compuertas superiores e inferiores cerradas. 2. Al presionar (I1) pulsador, se activará un motor (Q1), que abrirá las tajaderas de las compuertas superiores. Un final de carrera (I2), detiene la apertura de las mismas. 3. En ese instante, comienza a llenarse el embarcadero o zona común a través de las tajaderas situadas en las compuertas superiores. 4. Un detector analógico (AI1), medirá la altura en todo momento del embarcadero superior. Del mismo modo, otro detector analógico (AI2), medirá la altura del embarcadero o zona común. Cuando ambos detectores indiquen la misma medida, se considerará el embarcadero o zona común lleno de agua con la misma altura que el embarcadero superior. 5. Un pulsador (I3), podrá ordenar la apertura de las compuertas superiores a través del motor (Q3). Una vez las compuertas están abiertas, el motor (Q3), se detiene gracias al final de carrera (I4). El final de carrera (I4) ordenará el cierre de las tajaderas de las compuertas superiores, a través del motor (Q2). Un final de carrera (I5), detiene el cierre de estos elementos. En este instante, el barco puede entrar al embarcadero o zona común. 1 6. Una vez el barco está dentro de la zona común, un pulsador (I6), podrá ordenar el cierre de las compuertas superiores a través del motor (Q4). Un final de carrera (I7), certificará el correcto cierre de las mismas. 7. El siguiente paso es bajar el nivel de agua del embarcadero o zona común, a la altura del embarcadero inferior; para ello, se presionará el pulsador (I8), que abre las tajaderas de las compuertas inferiores. El final de carrera (I9), detiene la apertura de estas pequeñas compuertas. El agua empezará a bajar de nivel del embarcadero común. 8. En el embarcadero inferior existe un detector analógico (AI3), que mide la altura del agua en el mismo. Cuando su medida, coincide con la medida del detector analógico del embarcadero común (AI2), se podrán abrir las compuertas inferiores. 9. Un pulsador (I10), ordenará la apertura de las compuertas inferiores a través del motor (Q7). Un final de carrera (I11), detiene la apertura de dichas compuertas. El final de carrera (I11) ordenará el cierre de las tajaderas de las compuertas inferiores, a través del motor (Q6). Un final de carrera (I12), detiene el cierre de estos elementos. La embarcación puede salir del embarcadero o zona común, hacia el embarcadero inferior, y continuar su marcha. 10. Un pulsador (I13), ordenará el cierre de las compuertas inferiores, a través del motor (Q8). El final de carrera (I14), detiene el cierre de los citados elementos. La esclusa está en disposición de realizar un nuevo traslado. Vea el desarrollo por partes. 1 2 3 4 5 6 2 Dibujo principal: Pulsador que ordena apertura compuertas embarcadero superior Embarcadero superior I1 I3 I6 I7 Q1 Q2 I2 I5 Q3 Q4 Zona común I8 I4 Pulsador que ordena apertura compuertas embarcadero inferior Q5 Q6 I9 Q7 Q8 Embarcadero inferior 3 Donde: I1. Pulsador que abre las tajaderas de las compuertas del embarcadero superior (Q1). I2. Final de carrera que detiene las puertas de las tajaderas de las compuertas superiores. I3. Pulsador que ordena la apertura de las compuertas superiores (Q3). I4. Final de carrera que detiene apertura compuertas embarcadero superior. I5. Final de carrera que detiene cierre de tajaderas de compuertas superiores. I6. Pulsador que ordena el cierre de las compuertas superiores. I7. Final de carrera que detiene el cierre de las compuertas superiores. I8. Pulsador que abre las tajaderas de las compuertas del embarcadero inferior (Q5). I9. Final de carrera que detiene las puertas de las tajaderas de las compuertas inferiores. I10. Pulsador que ordena la apertura de las compuertas inferiores (Q7). I11. Final de carrera que detiene apertura compuertas embarcadero inferior. I12. Final de carrera que detiene cierre de tajaderas de compuertas inferiores. I13. Pulsador que ordena el cierre de las compuertas inferiores. I14. Final de carrera que detiene el cierre de las compuertas inferiores. Q1. Motor que abre tajaderas, compuertas superiores. Q2. Motor que cierra tajaderas de las compuertas superiores. Q3. Motor que abre las compuertas del embarcadero superior. Q4. Motor que cierra las compuertas del embarcadero superior. Q5. Motor que abre tajaderas, compuertas inferiores. Q6. Motor que cierra tajaderas de las compuertas inferiores. Q7. Motor que abre las compuertas del embarcadero inferior. Q8. Motor que cierra las compuertas del embarcadero inferior. AI 1. Detector analógico que mide la altura del agua en el embarcadero superior. AI 2. Detector analógico que mide la altura del agua en el embarcadero común. AI 3. Detector analógico que mide la altura del agua en el embarcadero inferior. Calibre de los conmutadores analógicos de valor umbral: B012 (AI 1): ON y OFF a 350, equivale a 3,5 m de altura de agua. B013 (AI 2): ON y OFF a 350, equivale a 3,5 m de altura de agua. B031 (AI 2): ON a “0” y OFF a “150”. Equivale a una activación inferior a 1,5 m de altura. B017 (AI 3): ON a “0” y OFF a “150”. Equivale a una activación inferior a 1,5 m de altura. Recuerde, que para reducir la complejidad de las conexiones de los bloques, se utiliza la herramienta [Abrir/unir conexión]: Por ejemplo, la entrada I1 conecta con el bloque AND B001 en la segunda entrada de éste, por tanto la marcación que sale de I1 indicará su destino [B001/2] es decir, bloque B001 entrada 2; y en el bloque de destino aparecerá indicada la procedencia, en este caso [I1]. 4 Programación: 5 Donde, los bloques sin identificar son: B001 → B003 → B005 → B006 → B008 → B009 → B011 → B014 → B015 → B016 → B018 → B038 → B039 → 6