Capítulo 1
Anuncio

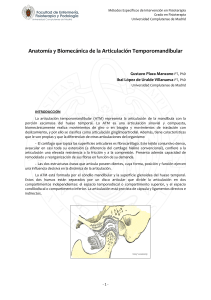
Capítulo 1 Introducción La Biomecánica es la Mecánica aplicada a la Biología, es decir, la disciplina que intenta explicar la mecánica de los sistemas vivos. Esta ciencia ayuda a entender el funcionamiento habitual de los organismos, a caracterizar el comportamiento de tejidos y órganos vivos desde el punto de vista mecánico, a predecir los cambios que sufren debido a alteraciones y a proponer métodos de intervención arti cial. Este trabajo estudia el disco de la articulación temporomandibular ya que se considera uno de los elementos más importantes que intervienen en la apertura y cierre de la mandíbula. Es por esto que una apropiada caracterización de las propiedades mecánicas del disco es necesaria para la simulación numérica del movimiento de la mandíbula. 1.1. Biomecánica de la articulación temporomandibular La ATM es una articulación sinovial que une la mandíbula al cráneo, concretamente los cóndilos de la mandíbula al hueso temporal. El contacto entre ambas partes óseas se produce a través de un disco articular que reparte sobre el hueso temporal las cargas que el cóndilo le transmite. Se utiliza al masticar, hablar, tragar, bostezar, en diversas gesticulaciones faciales, etc. Por ello, es una de las articulaciones más usadas en el cuerpo. Se integra principalmente por el disco articular, el cóndilo mandibular, la fosa articular del temporal (cavidad glenoidea) y la cápsula articular (Ver gura 1-1). Seguidamente se hará una breve descripción de dichas partes de la articulación. 3 4 Introducción Figura 1-1: Constituyentes de la articulación temporomandibular. Figura tomada de [1] 1.1.1. Disco articular La ATM se halla dividida en dos partes por el disco articular, separando la cavidad articular en 2 compartimientos: supradiscal e infradiscal. Es un elemento que merece una mención especial debido a su papel fundamental en la articulación, ya que es capaz de disipar, transportar y transmitir cargas desde la mandíbula hasta el hueso, permitiendo el desplazamiento de la mandíbula fuera de su posición teórica, entendiendo por tal la de reposo. El disco articular forma una envoltura móvil para la cabeza del cóndilo. Tiene forma ovalada de eje mayor paralelo al cóndilo y presenta sus regiones anterior y posterior más engrosadas que el centro (ver gura 1-2). Está directamente unido al cóndilo, medial y lateralmente, en los polos del cóndilo, lo que le obliga a moverse con él en la apertura y cierre de la boca. Las inserciones de la región anterior del disco se llevan a cabo con el ligamento capsular que rodea la mayor parte de la articulación. Por delante de este ligamento el disco también se une al músculo pterigoideo externo, el cual mediante la acción coordinada de sus dos porciones superior e inferior mantiene el disco en su posición anatómica normal. 1.1 Biomecánica de la articulación temporomandibular 5 Figura 1-2: Zonas representativas del disco de la ATM de cerdo. 1.1.2. Cóndilo La super cie articular de la mandíbula comprende las caras superior y anterior de los cóndilos. Sólo la parte anterior hasta la cresta condilar está tapizada por brocartílago. En un adulto, el cóndilo tiene entre 15 y 20 mm de longitud y entre 8 y 10 mm de ancho. Su eje largo es perpendicular a la rama mandibular y debido a la inclinación de ésta, los ejes de los cóndilos izquierdo y derecho se cortan formando un ángulo comprendido entre 145 y 160 grados. La super cie articular del cóndilo es fuertemente convexa vista desde un lateral y no tanto vista desde frente y además está visiblemente inclinada hacia delante. 1.1.3. Fosa gleneoidea La fosa glenoidea o fosa mandibular es la concavidad del temporal donde se aloja el cóndilo. Su pared anterior se denomina eminencia articular y su pared posterior, apó sis postglenoidea. La parte superior de la fosa glenoidea es una pared ósea muy delgada, lo cuál puede indicar que no es una zona que soporte mucha carga. La eminencia articular es la barra de hueso compacto que forma la raíz posterior del arco cigomático y la pared anterior de la fosa mandibular. Tiene la apariencia de una silla de montar: vista desde un lateral es convexa, mientras que vista de frente es ligeramente cóncava, aunque el 6 Introducción grado de convexidad y de concavidad es altamente variable de un individuo a otro. La pendiente anterior de la eminencia articular, denominada plano preglenoideo, desciende suavemente desde la base del hueso temporal. Durante la apertura de la boca, el cóndilo y el disco articular se mueven en dirección anterior por encima de la cresta de la eminencia articular y sobre el plano preglenoideo. Cuando la boca se cierra, disco y cóndilo vuelven a alojarse en la fosa glenoidea, viéndose facilitado su movimiento por la suave pendiente del citado plano. (Ver Figura 1-1 B) El tejido broso que cubre la eminencia articular es bastante grueso y rme. Además, dicha eminencia articular se caracteriza por la elevada densidad del hueso que la compone. Estas características morfológicas refuerzan la hipótesis de que es en esta zona de la articulación donde se transmite la mayor parte de las reacciones entre la mandíbula y el hueso temporal. 1.1.4. Cápsula articular. La cápsula articular es un delgado manguito de tejido que reviste completamente la articulación. El manguito consta de una capa externa de tejido broso revestida por una membrana sinovial sedosa. Esta membrana tiene la función de producir un tejido que lubrique la articulación y la repare se se produce desgaste de la misma. 1.2. Tejidos biológicos blandos Es comúnmente aceptado que los tejidos blandos conectivos tales como el disco temporomandibular son materiales multifásicos, es decir, un mezcla de bras de colágeno y elastina, agua, glicosaminoglicanos, glicoproteínas y células. Basándose en este concepto, Simon et al. [2] utilizó la teoría clásica de consolidación de suelos para describir el comportamiento mecánico del disco intervertebral. En 1980 Mow et al. [3] propuso una aproximación mas rigorosa y teóricamente versátil basada en la teoría de las mezclas [4] para describir la deformación del cartílago articular frente a cargas. En su modelo denominado la teoría bifásica, Mow et al. suponen que el tejido del cartílago es una mezcla de dos constituyentes inmiscibles: una fase sólida incompresible y una fase uida correspondiente al líquido intersticial evidentemente también incompresible. El modelo bifásico ha sido extendido hasta incluir comportamientos no lineales tales como permeabilidad dependiente de la deformación y grandes deformaciones [5], [6]. En los modelos desarrollados por 1.3 Ob jetivos y descripción del traba jo 7 Mow et al. y en los subsiguientes estudios experimentales y teóricos que parten de él, se simula el tejido hidratado blando como una mezcla bifásica de una matriz sólida embebida en tejido intersticial. Estos modelos requieren del uso de la teoría de la poroelasticidad. El cartílago además es un material altamente heterogéneo y anisótropo. Sin embargo, ha sido habitual aproximar su comportamiento como bifásico homogéneo e isótropo [3]. Este modelo ha tenido mucho éxito en la descripción de la mayoría de los resultados experimentales correspondientes a ensayos de compresión no con nada y ha sido estudiado por diversos autores [3], [7], [8], [9], [10] aunque experimentos recientes han sugerido ciertas limitaciones para la interpretación de ensayos con nados utilizando dichos modelos. En contraposición a la teoría bifásica se encuentra la teoría monofásica. Muchos autores han propuesto modelos viscoelásticos lineales para relacionar tensión-deformación, utilizando modelos como el de Voigt, Maxwell y Kelvin. Otros autores, propusieron espectros continuos de relajación, combinando in nitos elementos de Voigt y Maxwell [11] y otros propusieron modelos no lineales de la teoría de Kelvin usando resortes de distinta longitud natural [12]. Sin embargo, estos modelos no son aplicables cuando las deformaciones son nitas, ya que se observa un comportamiento tensión-deformación no lineal. Por esto último, en este trabajo se utiliza un modelo de comportamiento viscoelástico cuasi lineal (QLV), propuesto por Fung [13] para describir el comportamiento del disco de la articulación temporomandibular (ATM) y usado por otros autores para describir el comportamiento mecánico de otros tejidos blandos del cuerpo como [14], [15], [16] y [17]. 1.3. Objetivos y descripción del trabajo La respuesta biomecánica del disco de la ATM para condiciones de carga de compresión in vitro ha sido descrita tanto para ensayos de compresión con nada [18], como compresión no con nada [19] e indentación [20]. Estos experimentos son los que se usan habitualmente para obtener in vitro las propiedades mecánicas de este tejido y son, por tanto, los más utilizados para validar los modelos de comportamiento del disco de la ATM. La procedencia de los especímenes ensayados también es diversa, siendo los más estudiados los discos de ATM de bovino, porcino y humano. En el presente estudio, se ha trabajado con el disco de la ATM de cerdo basándose en las 8 Introducción similitudes anatómicas que presenta con el disco humano [21] y la facilidad de su obtención y tratamiento. Las probetas se han ensayado a compresión no con nada. Para describir el comportamiento del disco se ha usado un modelo viscoelástico cuasi-lineal (QLV). El objetivo de este trabajo es obtener las constantes de este modelo que mejor caracterizan el comportamiento mecánico de los discos ensayados. La primera parte de este trabajo (capítulo 1 y 2) se dedica a describir brevemente la anatomía del disco de la ATM. Se analizan sus constituyentes y la implicación de éstos en el comportamiento viscoelástico del disco. En el capítulo 3 se describen las propiedades mecánicas de los tejidos blandos y los distintos modelos monofásicos que describen su comportamiento. El capítulo 4 tiene como objetivo presentar el modelo de elementos nitos que ha permitido de nir correctamente unas condiciones de ensayo válidas para el posterior ajuste de las constantes del modelo QLV. El capítulo 5 describe el trabajo experimental realizado, con sus correspondientes protocolos de extracción y conservación de muestras y el protocolo de ensayo. En el capítulo 6 se presentan los resultados experimentales obtenidos asi como el ajuste del modelo QLV a dichos resultados. Por último, en el capítulo 7 se extraen una serie de conclusiones y se comentan los trabajos futuros que se desarrollarán en este campo.