Dise˜no de filtros en tiempo continuo
Anuncio

4
Diseño de filtros en tiempo continuo
Quizá una de las operaciones más comunes para el ingeniero en comunicaciones y electrónica es el filtrado de señales. Ya sea una aplicación en sistemas de comunicación, control, o instrumentación, el filtrado aparecerá en
alguna fase del sistema. Ası́ como el procesamiento de la señal es la operación
que nos permite extraer o transformar la información útil al observador, el
filtrado nos permite alterar o seleccionar algún segmento de frecuencias de la
señal a ser filtrada. Esta operación de filtrado permite atenuar algunas frecuencias mientras otras pueden permanecer sin alterar o con una alteración
mı́nima (si no se desea introducir alguna ganancia en amplitud).
Dado que el diseño de una cierta clase de filtros digitales está basado en
la transformación de un filtro analógico, en este capı́tulo se estudia el diseño
de filtros en tiempo continuo, o analógicos, que después serán empleados en
el diseño de filtros digitales con respuesta infinita al impulso (RII).
Por diseño entendemos la obtención de la función de transferencia H(s),
a partir de las especificaciones dadas sobre la respuesta en frecuencia. Son
varios métodos de aproximación de filtros analógicos, funciones de aproximación entre ellos: filtros de Butterworth, filtros de Chebyshev, y filtros
Elı́pticos. Se dice “aproximación” porque un filtro ideal dado a partir de sus
propiedades de su respuesta en frecuencia, es decir
H(jΩ) =
(
1, si Ω ≤ Ωc
0, si Ω > Ωc ,
(4.1)
donde Ωc es la frecuencia de corte, es fı́sicamente no realizable, o no causal.
Esto se puede demostrar al obtener la respuesta al impulso h(t) de la función
de transferencia dada por H(jΩ).
79
80
4.1.
4.1. ESPECIFICACIONES DE UN FILTRO
Especificaciones de un filtro
Generalmente la especificación de un filtro incluye tres regiones: una
banda pasante, una banda de transición, y una banda de rechazo. En la
figura 4.1 se muestran estas regiones para el caso de un filtro pasa-bajas,
donde k1 y k2 son las ganancias a las frecuencias de corte Ω c y de rechazo
Ωr , respectivamente.
k
1
banda
de transición
banda
pasante
banda de
rechazo
k2
Ωc
Ωr
Figura 4.1: Especificaciones de un filtro.
4.2.
La aproximación de Butterworth
En la aproximación de Butterworth, también llamada aproximación con
amplitud máximamente plana, la amplitud al cuadrado del filtro está dada
por
1
|H(jΩ)|2 =
(4.2)
2n ,
1 + ΩΩc
donde n es el orden de la función de transferencia correspondiente y Ω c
está definida como la frecuencia de corte de
√ -3 dB. Puede verse que, cuando
Ω = Ωc , la respuesta en magnitud será 1/ 2 veces la ganancia de corriente
directa, es decir, esto corresponde a una atenuación de 3.01 dB, si se tiene
la ganancia en dB. Más aún, podemos hacer el siguiente análisis.
Sea la ganancia Gn (Ω), entonces
Gn (Ω) = 20 log |H(jΩ)| = 10 log |H(jΩ)|2n
Ω 2n 1
,
= 10 log 2n = −10 log 1 +
Ωc
[1 + ΩΩc
]
(4.3)
donde log es el logaritmo base 10.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.2. LA APROXIMACIÓN DE BUTTERWORTH
81
Para Ω << Ωc , tenemos que
Ω 2n
≈ 0, y entonces
Ωc
Gn (Ω) = −10 log |1 + 0| = 0.
Para Ω >> Ωc ,
1 <<
Ω
Gn (Ω) ≈ −10 log[
Ωc
2n
Ω
Ωc
2n
y entonces
Ω
,
] = −20 n log
Ωc
es decir, presenta una atenuación de −20 n dB/década.
En la figura 4.2 se muestra la respuesta en frecuencia para el filtro de
Butterworth de orden 1 a 3, donde claramente se ve la atenuación de −20n
db/década.
0
−10
n=1
Magnitud en dB
−20
n=2
−30
−40
n=3
−50
−60
−70 −1
10
0
10
Frecuencia en (rad/s)
1
10
Figura 4.2: Respuesta en frecuencia para filtros Butterworth, orden 1 a 3.
Para encontrar la función de transferencia decimos que Ω = s/j, ya que
s = jΩ, y con Ωc = 1 (frecuencia de corte normalizada) tenemos
|Hn (jΩ)|2 = Hn (jΩ)H(−jΩ) =
1
.
1 + (s/j)2n
Para encontrar los polos de la función de transferencia necesitamos encontrar
las raı́ces del denominador. Estas raı́ces están dadas por la ecuación (6.8):
H(jΩ) =
(
π
+ kπ
k=0,1,. . . (2n-1)
si n es par, Sk = 16 2n
n ,
kπ
si n es impar, Sk = 16 n , k=0,1,. . . (2n-1),
(4.4)
donde Sk es la k-ésima raiz o polo del denominador, con magnitud unitaria
y ángulo 6 ·.
Con el uso de (6.8) se pueden obtener los polinomios de Butterworth del
orden n deseado. En la tabla 4.1 se muestran algunos de estos polinomios.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
82
4.2. LA APROXIMACIÓN DE BUTTERWORTH
orden n
1
2
3
4
..
.
Tabla 4.1: Algunos polinomios de Butterworth.
Bn (s)
(s + 1)√
(s2 + 2s + 1)
(s2 + s + 1)(s + 1)
(s2 + 0.765s + 1)(s2 + 1.84s + 1)
..
.
Ejemplo 4.2.1 Encontrar la función de transferencia H 1 (s) para un filtro
de Butterworth normalizado de orden 1.
Solución:
Como n = 1 tenemos dos raı́ces ya que k = 0 y 1, ası́
0π
1
1π
S1 = 16
.
1
Estas dos raı́ces se muestran en la figura 4.3. Tomando los polos del lado
izquierdo, es decir, los polos que darán una función de transferencia estable,
nos queda
S0 = 16
H1 (s) =
1
1
=
.
s − (−1)
s+1
Plano−s
1.5
Eje Imaginario
1
0.5
0
−0.5
−1
−1.5
−1.5
−1
−0.5
0
Eje Real
0.5
1
1.5
Figura 4.3: Raı́ces de la función de Butterworth para n=1.
Ejemplo 4.2.2 Encontrar la función de transferencia H 2 (s) para el filtro
de Butterworth normalizado de orden 2.
Solución:
Como n = 2 tenemos cuatro raı́ces, con k = 0, 1, 2, y 3.
Sk = 16
π kπ
+
, k = 0, 1, 2, 3.
4
2
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.2. LA APROXIMACIÓN DE BUTTERWORTH
83
Desarrollando para n=2 y cada valor de k se obtiene
π
,
4π
π
,
+
= 16
4
2
π
= 16
+π ,
4
π
3π ,
+
= 16
4
2
S0 = 16
S1
S1
S1
Estas cuatro raı́ces se muestran en la figura 4.4. Tomando los polos del lado
izquierdo, es decir, los polos que darán una función de transferencia estable,
nos queda
H2 (s) =
H2 (s) =
1
[s − (−0.7071 + j0.7071)][s − (−0.7071 − j0.7071)]
1
√
.
s2 + 2s + 1
Plano−s
1.5
Eje Imaginario
1
0.5
0
−0.5
−1
−1.5
−1.5
−1
−0.5
0
Eje Real
0.5
1
1.5
Figura 4.4: Raı́ces de la función de Butterworth para n=2.
En las figuras 4.5 y 4.6 se muestran los polos (o raı́ces) en el plano-s
para los polinomios de Butterworth de orden n=6 y n=7. Puede observarse
que los polos de Butterworth están distribuidos en un cı́rculo de radio 1.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
84
4.2. LA APROXIMACIÓN DE BUTTERWORTH
Plano−s
Eje
Imaginario
jΩ
Eje
Real σ
Figura 4.5: Raı́ces de la función de Butterworth para n=6.
Plano−s
Eje
Imaginario
jΩ
Eje
Real σ
−1
1
Figura 4.6: Raı́ces de la función de Butterworth para n=7.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.2. LA APROXIMACIÓN DE BUTTERWORTH
85
Tabla 4.2: Polinomios de Butterworth de orden n, Bn (s) = bn sn + bn−1 sn−1 +
. . . + b1 s + b0 .
orden
n=1
Bn (s)
b0 =1.0000
b1 =1.0000
orden
n=2
n=3
b0
b1
b2
b3
=
=
=
=
1.0000
2.0000
2.0000
1.0000
n=4
n=5
b0
b1
b2
b3
b4
b5
=
=
=
=
=
=
1.0000
3.2361
5.2361
5.2361
3.2361
1.0000
n=6
n=7
b0
b1
b2
b3
b4
b5
b6
b7
=
=
=
=
=
=
=
=
1.0000
4.4940
10.0978
14.5918
14.5918
10.0978
4.4940
1.0000
n=8
Bn (s)
b0 = 1.0000
b1 = 1.4142
b2 = 1.0000
b0 = 1.0000
b1 = 2.6131
b2 = 3.4142
b3 = 2.6131
b4 = 1.0000
b0 = 1.0000
b1 = 3.8637
b2 = 7.4641
b3 = 9.1416
b4 = 7.4641
b5 = 3.8637
b6 = 1.0000
b0 = 1.0000
b1 = 5.1258
b2 = 13.1371
b3 = 21.8462
b4 = 25.6884
b5 = 21.8462
b6 = 13.1371
b7 = 5.1258
b8 = 1.0000
Para el diseño de filtros de Butterworth haremos uso de tablas que contienen los polinomios de Butterworth, una vez que se haya determinado el
orden del filtro deseado. En la tabla 4.2 se muestran los valores para construir las funciones de transferencia de filtros Butterworth normalizados de
orden 1 a 8. Conociendo el orden n del filtro, decimos que H(s) = 1/B n (s)
donde Bn (S) son los polinomios de Butterworth.
4.2.1.
Transformaciones analógico-analógico
En la sección anterior se vio cómo encontrar la función de transferencia
de un filtro de Butterworth normalizado de orden n. Si los polinomios de
Butterworth se anotan en forma de tabla es muy fácil obtener la función de
transferencia del filtro de Butterworth normalizado correspondiente. Como
su nombre lo indica, éstos son filtros normalizados, es decir, tienen una
frecuencia de corte de 1 rad/s; sin embargo, en una aplicación práctica, rara
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
86
4.2. LA APROXIMACIÓN DE BUTTERWORTH
vez necesitaremos un filtro precisamente con esa frecuencia de corte. En esta
sección, se empleará una transformación que permita al filtro de orden n, que
inicialmente tiene una frecuencia de corte de 1 rad/s, tener una frecuencia
de corte según se desee.
Las transformaciones llamadas transformaciones de frecuencia, o transformaciones analógico-analógico permiten no sólo cambiar la frecuencia de
corte sino, también cambiar el tipo de respuesta en frecuencia del filtro, es
decir, es posible transformar un filtro normalizado pasa-bajas en un filtro
pasa-altas con frecuencia de corte Ω d , o bien a un filtro pasa-banda, o a un
filtro rechazo de banda.
Si en nuestra función de transferencia H(s), reemplazamos s por s/Ω d ,
obtenemos una nueva función de transferencia H 0 (s):
H 0 (s) = H(s)
s→s/Ωd
= H(s/Ωd ),
donde H 0 (s) es la nueva función de transferencia, obtenida a partir de H(s)
con una frecuencia de corte deseada Ω d .
Para obtener la respuesta en frecuencia evaluamos H 0 (s) en s = jΩ, ası́:
|H 0 (jΩ)| = |H(jΩ/Ωd )|,
y cuando Ω = Ωd ,
|H 0 (jΩ)| = |H(j1)|,
es decir, |H 0 (jΩ)| es igual al valor de la función de transferencia del filtro
normalizado en Ω = 1. De esta manera hemos desplazado la frecuencia
de corte de 1 rad/s a Ωd rad/s. Ésto también se llama escalamiento en
frecuencia, y puede emplearse para transformar un filtro Pb (pasa-bajas) en
Pa (pasa-altas), o de un filtro Pb a PB (pasa-banda), entre otros.
Por medio de la transformación s = Ω d /s, se obtiene una respuesta en
frecuencia pasa-altas con frecuencia de corte Ω d .
Transformación pasa-banda
Como se vio en la sección anterior, la transformación s/Ω u transforma una respuesta en frecuencia normalizada pasa-bajas en una respuesta
en frecuencia no normalizada pasa-bajas. Para obtener una transformación
pasa-bajas−pasa-banda (Pb-PB) se requiere una transformación doble. Si
tenemos un FPb caracterizado por alguna distribución de ceros y polos sobre el plano s, éstos tendrán su eje de simetrı́a alrededor del eje real (σ). Si
desplazamos el eje de simetrı́a a alguna frecuencia Ω 0 , entonces Ω0 reemplazará a Ω. Esto requiere de una transformación Ω → Ω 0 ; sin embargo, esta
transformación no es útil, ya que para tener un filtro realizable se requieren
polos complejos conjugados, ası́ que la transformación que se utiliza es
s→
G. Miramontes, ISBN 968-5923-15-9
Ω0
s
.
+
Ω0
s
(4.5)
PDS: Introducción con teorı́a y práctica
4.2. LA APROXIMACIÓN DE BUTTERWORTH
87
Si se desea, esto podrı́a considerarse como una doble transformación, una
pasa-altas ( Ωs0 ) más una pasa-bajas ( Ωs0 ). Además,
s2 + Ω2
s
Ω0
=
,
+
Ω0
s
Ω0 s
(4.6)
donde el término (s2 + Ω2 ) nos da los polos complejos conjugados, mientras
que el término 1/s dará los ceros en el origen y en el infinito lo que asegura
una respuesta pasa-banda. El término 1/Ω 0 afecta al ancho de banda.
En las figuras 4.7 a 4.9 se muestra la descripción gráfica de la transformación Pb-PB vista como un desplazamiento del eje real a ±Ω 0 . En la figura
4.7 se muestra la posición de un polo simple para un FPb Butterworth de
primer orden. En la figura 4.8 se muestra la nueva posición del polo cuando
el eje real se ha desplazado a ±Ω0 dando un par de polos complejos conjugados. Es importante notar la inclusión del cero en el origen para garantizar la
respuesta pasa-banda. Finalmente, en la figura 4.9 se muestra la respuesta
en frecuencia correspondiente a la distribución de polos y ceros de la figura
4.8.
Plano−s
1.5
jΩ
Eje Imaginario
1
polo de un
0.5
filtro pasa−bajas
0
−0.5
−1
−1.5
−1.5
−1
−0.5
0
Eje Real
0.5
1
1.5
Figura 4.7: Posición del polo pasa-bajas Butterworth de primer orden.
Plano−s
1.5
jΩ
Eje Imaginario
1
desplazamiento
del eje real
a +Ω0
0.5
polos
complejos
0
σ
conjugados
−0.5
−1
−1.5
−1.5
−1
−0.5
0
Eje Real
0.5
1
1.5
Figura 4.8: Transformación del eje real a ±Ω0 .
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
88
4.2. LA APROXIMACIÓN DE BUTTERWORTH
−1
Magnitud
−2
−3
−4
−5
−6
0
10
Frecuencia [rad/s]
Figura 4.9: Respuesta pasa-banda por desplazamiento del eje real.
De lo anterior se puede deducir que el FPB resultante tendrá un orden
que es el doble del equivalente pasa-bajas. Cabe hacer notar que la transformación por lo general no es aritméticamente simétrica. Si Ω L y ΩU son los
extremos de la banda de paso, entonces el centro de la banda está dado por
Ω0 =
p
ΩL ΩU ,
(4.7)
y no como Ω0 = (ΩL + ΩU )/2. Para filtros con un ancho de banda estrecho
la diferencia entre la media geométrica y la media aritmética es pequeña.
√ En términos del ancho de banda W = Ω U − ΩL y de la frecuencia Ω0 =
ΩU ΩL , la transformación requerida queda como
s=
Ω0
s2 + ΩU ΩL
Ω0 s
+
(
)=
.
W Ω0
s
s(ΩU − ΩL )
(4.8)
Para obtener una transformación Pb–PB la transformación requerida es
la inversa de (4.8) es decir:
s=
4.2.2.
s(ΩU − ΩL )
.
s2 + ΩU ΩL
(4.9)
Diseño de filtros Butterworth pasa-bajas
Se ha visto que es posible desplazar la frecuencia de corte de un filtro
normalizado de 1 rad/s a cualquier frecuencia deseada, pero falta determinar
cuál es el orden requerido del filtro Butterworth para cumplir con los requerimientos de ganancia en la banda pasante, ası́ como la atenuación mı́nima
en la banda de rechazo.
Normalmente, los requerimientos del filtro se especificarán con cuatro
parámetros: k1 , k2 , Ω1 , Ω2 , donde Ω1 = Ωc , y Ω2 = Ωr , corte y rechazo
respectivamente. Empleamos Ω1 y Ω2 en lugar de Ωc y Ωr , y reservamos Ωc
para el filtro normalizado. Además, como se verá más adelante, la n depende
de (Ω1 /Ω2 ) en filtros Butterworth y Ω2 /Ω1 en filtros Chebyshev y parece
más fácil de recordar de este modo.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.2. LA APROXIMACIÓN DE BUTTERWORTH
89
De la figura 4.1, se tienen las siguientes condiciones sobre la respuesta
en frecuencia deseada,
0 ≥ 20 log |H(jΩ)| ≥ k1 , para toda Ω ≤ Ω1 y
20 log |H(jΩ)| ≤ k2 , para toda Ω ≥ Ω2 .
(4.10)
Si evaluamos (4.10) con H(jΩ) = 1/Bn (jΩ), se tiene que cuando Ω = Ω1
se debe satisfacer
10 log
1
1+
10 log
de donde
Ω1
Ωc
2n = k1 y
1
1+
Ω2
Ωc
(4.11)
2n = k2 ,
(4.12)
Ω 2n
1
= 10−k1/10 − 1 y
Ωc
Ω 2n
2
= 10−k2/10 − 1.
Ωc
Dividiendo (4.13) entre (4.14)
Ω 2n
1
Ω2
=
(4.13)
(4.14)
10−k1 /10 − 1
,
10−k2 /10 − 1
(4.15)
para que, finalmente, resolviendo para n,
n=
l m
l log[(10−k1 /10 − 1)/(10−k2/10 − 1)] m
2 log(Ω1 /Ω2 )
,
(4.16)
donde · indica redondeo hacia arriba, ası́ que, si n es fraccionario, emplearemos el número entero siguiente superior.
Una vez determinado el valor numérico de n, tomamos la función prototipo de la tabla 4.2 de polinomios de Butterwoth. Ahora, para que esta
función de transferencia, construida con los polinomios de la tabla 4.2, tenga
una frecuencia de corte Ω1 , si y sólo si k1 = −3dB, debemos desplazar la
frecuencia de corte normalizada a Ω 1 con la transformación s → s/Ω1 . Si k1
es de valor arbitrario debemos hacer un ajuste al escalar la frecuencia de la
función prototipo.
Para realizar este ajuste tenemos dos opciones. Si nos interesa más cumplir con el requerimiento de ganancia en Ω 1 , entonces calculamos la frecuencia de escalamiento con
Ω1
Ωesc =
,
(4.17)
−k1/10
(10
− 1)1/2n
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
90
4.2. LA APROXIMACIÓN DE BUTTERWORTH
y entonces aplicaremos la transformación s = s/Ω esc .
Si, por el contrario, interesa más exceder el requerimiento en Ω 2 entonces
calculamos la frecuencia de escalamiento con
Ωesc =
Ω2
− 1)1/2n
(4.18)
(10−k2/10
para aplicar la transformación.
Ejemplo 4.2.3 Diseñar un filtro con respuesta monotónica con las siguientes especificaciones, frecuencia de corte, f c , de 1000 Hz con -2 dB y una
atenuación mı́nima de -20 dB a una frecuencia de rechazo, f r , de 3000 Hz.
La frecuencia en Hz se denotará por f .
Solución:
Tenemos pues, k1 = −2, Ω1 = 2πfc = 2π1000 k2 = −20, Ω2 = 2πfr =
2π3000, sustituyendo
n=
l log[(100.2 − 1)/(102 − 1)] m
2 log(1000/3000)
=3
entonces, tomamos la función prototipo
HB3 (s) =
1
,
(s2 + s + 1)(s + 1)
ahora aplicamos una transformación Pb–Pb, con
Ωesc =
6.2831853 × 103
= 6.8706913 × 103
(100.2 − 1)1/6
H(s) =
1
|
3
(s2 + s + 1)(s + 1) s=s/6.8706913×10
y
para obtener
H(s) =
3.243406044 × 1011
s3 + 13741.383s2 + 94412799.811s + 3.243406044 × 1011
En la figura 4.10 se muestra la respuesta en frecuencia de la función de
transferencia encontrada. Además, en las figuras 4.11 y 4.12 se puede observar, después de hacer una ampliación, que se cumple con el requerimiento
de -2 dB en 1000 Hz y se excede, con poco más de 5 dB, el requerimiento
en 3000 Hz.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.2. LA APROXIMACIÓN DE BUTTERWORTH
91
10
0
Ganancia en (dB)
−10
−20
−30
−40
−50
−60
−70 1
10
2
3
10
10
Frecuencia (Hz)
4
5
10
10
Figura 4.10: Respuesta en frecuencia del filtro del ejemplo 4.2.3.
2
Ganancia en (dB)
1
0
−1
−2
−3
−4
−5
−6
−7
3
10
Frecuencia (Hz)
Figura 4.11: Ampliación en k1 = −2 dB.
−10
Ganancia en (dB)
−15
−20
−25
−30
−35
−40
−45
3
10
4
Frecuencia (Hz)
10
Figura 4.12: Ampliación en k2 < −20 dB.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
92
4.2. LA APROXIMACIÓN DE BUTTERWORTH
4.2.3.
Diseño de filtros Butteworth pasa-banda
El diseño de filtros Butterworth pasa-banda está basado en la aplicación
de una transformación sobre un filtro prototipo pasa-bajas. Los requerimientos tı́picos son los que se muestran en la figura 4.13. Donde se cumple
con
20 log |H(jΩ)| ≤ k2 , para Ω ≤ Ω1
0 ≤ 20 log |H(jΩ)| ≤ k1 , para ΩL ≤ Ω ≤ ΩU
20 log |H(jΩ)| ≤ k2 , para Ω ≥ Ω2
0
k
1
k2
Ω
1
ΩU
ΩL
Ω
2
Figura 4.13: Especificaciones para un filtro pasa-banda.
La transformación necesaria es
HP B (s) = HP b (s)
s2 +ΩL ΩU
U −ΩL )
s= s(Ω
,
(4.19)
donde PB significa pasa-banda, y Pb significa pasa-bajas. Es decir, se aplicará una transformación analógico-analógico sobre un filtro pasa-bajas para
obtener la función de transferencia del filtro pasa-banda.
Para satisfacer el requerimiento de ganancia k 2 en Ω1 debemos mantener
la igualdad dentro de la transformación, esto es,
jΩr =
(jΩ21 + ΩL ΩU )
jΩ1 (ΩU − ΩL )
Resolviendo para Ωr tenemos
Ωr =
−Ω21 + ΩL ΩU
Ω1 (ΩU − ΩL )
y similarmente para satisfacer k2 en Ω2 , tenemos
Ωr =
−Ω22 + ΩL ΩU
.
Ω2 (ΩU − ΩL )
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.2. LA APROXIMACIÓN DE BUTTERWORTH
93
Ahora bien, dependiendo del valor numérico de Ω 1 y Ω2 (donde Ω1 <
Ω2 ) con respecto al producto ΩL ΩU , la Ωr podrı́a ser positiva o negativa.
También en la mayorı́a de los casos las dos Ω r anteriores no serán iguales
y deberemos seleccionar el caso más restrictivo. Ası́ pues, el valor de Ω r
será aquel que cumpla con
Ωr = mı́n{|A|, |B|},
(4.20)
donde
−Ω21 + ΩL ΩU
Ω1 (ΩU − ΩL )
Ω22 − ΩL ΩU
B=
.
Ω2 (ΩU − ΩL )
A=
(4.21)
Nótese el cambio de signo en el cálculo de B.
Esta Ωr será empleada en el cálculo del orden del filtro pasa-bajos prototipo, empleando (4.16) con Ω1 = 1, y Ω2 = Ωr .
El procedimiento es el siguiente:
1.
Dadas las especificaciones del FPB deseado encontrar A y B.
2.
Determinar Ωr .
3.
Calcular el orden n del FPb prototipo.
4.
Encontrar (o leer de las tablas) la función de transferencia del FPb
normalizado.
5.
Aplicar la transformación dada en (4.19).
Ejemplo 4.2.4 Diseñar un FPB con las siguientes especificaciones: respuesta en frecuencia máximamente plana, con -3 dB a 50 Hz y 2kHz, y con al
menos 20 dB de atenuación en 20Hz y 4.5kHz
Solución:
tenemos los siguientes datos
Ω1 = 2π(20) = 125.6637 rad/s,
Ω2 = 2π(4500) = 2.8274 × 104 rad/s,
ΩL = 2π(50) = 314.1593 rad/s,
ΩU
= 2π(2000) = 1.2566 × 104 rad/s.
Calculando A y B tenemos que A = 2.5640 y B = 2.2963; ası́ que Ω r =
2.2963. Entonces,
n=
l log[(100.3 − 1)/(102 − 1)] m
2 log(1/2.2963)
G. Miramontes, ISBN 968-5923-15-9
l
m
= 2.7667 = 3,
PDS: Introducción con teorı́a y práctica
94
4.3. LA APROXIMACIÓN DE CHEBYSHEV
de modo que nuestra función prototipo será
HP b (s) =
1
,
s3 + 2s2 + 2s + 1
aplicando la transformación (4.19) tenemos
HP B (s) =
1
2 +3.9478×106
3
{[ ss(1.25349×10
4) ]
+
2 +3.9478×106
2
2[ ss(1.25349×10
4) ]
2
6
+3.9478×10
+ 2[ ss(1.25349×10
4 ) ] + 1}
.
Reduciendo términos, la solución es
H(s) =
1.83926132639871 × 1012 s3
,
s 6 + b5 s 5 + b4 s 4 + b3 s 3 + b2 s 2 + b1 s + b 0
donde
b5 = 2.450442269800038 × 104
b4 = 3.120768911624457 × 108
b3 = 2.032740492883779 × 1012
b2 = 1.232030183398072 × 1015
b1 = 3.819125666120342 × 1017
b0 = 6.152890838882032 × 1019
En la figura 4.14 se muestra la respuesta en frecuencia para la función
de transferencia encontrada, puede observarse que se cumple ampliamente
con las especificaciones del filtro.
0
Ganancia en (dB)
−20
−40
−60
−80
−100
−120
1
10
2
10
3
10
Frecuencia (Hz)
4
10
Figura 4.14: Respuesta en frecuencia del FPB del ejemplo 4.2.4.
4.3.
La aproximación de Chebyshev
Otra función de aproximación está basada en los polinomios de Chebyshev también conocidos como Tschebysheff. Al igual que en los filtros de Butterworth se emplearon los polos estables de un polinomio de Butterworth,
para los filtros Chebyshev se emplearán los polos estables de un polinomio
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.3. LA APROXIMACIÓN DE CHEBYSHEV
95
de Chebyshev. Estos filtros exhiben una caı́da más acentuada que los de
Butterworth, a cambio de un rizo que aparece en la banda pasante o en la
banda de rechazo según se trate de Chebyshev tipo I o Chebyshev tipo II,
respectivamente.
4.3.1.
Los polinomios de Chebyshev
Antes de definir la función de transferencia de un filtro de Chebyshev,
conviene revisar algunas caracterı́sticas importantes de estos polinomios.
Los polinomios de Chebyshev están definidos por
Tn (x) =
(
si |x| ≤ 1
cos(n cos−1 x)
cosh(n cosh−1 x) si |x| > 1
(4.22)
donde
T0 (x) = 1, es decir, n = 0
T1 (x) = x, es decir, n = 1
T−n = Tn (x).
(4.23)
Los polinomios de Chebyshev, al igual que las funciones sinusoidales,
son ortogonales, pero con una función de ponderación sobre el intervalo
−1 ≤ x ≤ 1.
Para el caso de las funciones coseno, tenemos
Z
π
cos(mφ) cos(nφ)dφ =
0
haciendo φ = cos−1 x, se tiene que
0,
si m 6= n
π/2, si m = n 6= 0
π,
si, n = m = 0,
dφ = d(cos−1 x) = √
(4.24)
−1
,
1 − x2
cambiando lı́mites
si φ → 0, entonces x → 1
si φ → π, entonces x → −1,
ası́ pues
Z
1
−1
0,
si m 6= n
Tm (x)Tn (x)
p
π/2,
si
m = n 6= 0
dx
=
(1 − x2 )
π,
si n = m = 0
(4.25)
por lo que la función de ponderación es
1
,
(1 − x2 )
p
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
96
4.3. LA APROXIMACIÓN DE CHEBYSHEV
que, como puede verse, crece a medida que x se acerca a ±1.
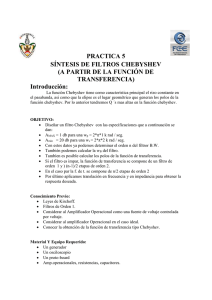
Los polinomios de Chebyshev oscilan entre ±1 dentro del intervalo −1 <
x < 1, mientras que fuera de este intervalo crecen rápidamente hacia +∞ o
−∞. Esto puede observarse en la figura 4.15 con T 5 (x), donde se observa,
además, que el número de oscilaciones es igual a n − 1.
5
4
3
2
n
T (x)
1
0
−1
−2
−3
−4
−5
−1.5
−1
−0.5
0
x
0.5
1
1.5
Figura 4.15: Polinomio de Chebyshev de orden 5, T5 (x).
Usando la identidad trigonométrica
cos[(n + 1)φ] + cos[(n − 1)φ] = 2 cos φ cos nφ,
(4.26)
y cambiando φ por cos−1 x tenemos
cos[(n + 1) cos −1 x] + cos[(n − 1) cos −1 x] = 2x cos(n cos−1 x)
Tn+1 (x) + Tn−1 (x) = 2xTn (x),
(4.27)
esto es, tenemos una fórmula de recursión de tres términos que permite
encontrar Tn+1 , conociendo los dos anteriores Tn (x) y Tn−1 (x). Se obtiene
T0 (x) = 1
T1 (x) = x
T2 (x) = 2x2 − 1
T3 (x) = 4x3 − 3x
T4 (x) = 8x4 − 8x2 + 1
(4.28)
Nótese que para n > 1 el primer coeficiente es 2 n−1 , y que los polinomios
son alternativamente funciones pares e impares de x. También nótese que
T0 (1) = T1 (1) = 1, y
Tn (1) = 1, para toda n.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.3. LA APROXIMACIÓN DE CHEBYSHEV
4.3.2.
97
Los filtros de Chebyshev
La función de transferencia de Chebyshev está dada por
|H(jΩ)|2 =
1
1+
2 [Tn (Ω/Ωc )]2
.
(4.29)
Para |Ω| ≤ Ωc
1
≤ |H(jΩ)|2 = |H(Ω)H(−Ω)| ≤ 1.
1 + 2
En exactamente Ω = Ωc ,
|H(Ω)|2 =
1
; ya que Tn (1) = 1.
1 + 2
Cuando |x| > 1, esperamos un incremento rápido en T n (x), por lo tanto
el efecto en la función de transferencia es hacer que la banda de transición
sea muy estrecha.
Para |Ω| = Ωr = Ω2 , la frecuencia de rechazo, deseamos una ganancia
1/A2 , es decir,
1
1
= 2,
(4.30)
1 + 2 Tn2 (Ω2 /Ω1 )
A
donde Ω2 = Ωr , y Ω1 = Ωc . Entonces
|Tn (Ω2 /Ωc )| =
y resolviendo para n,
n=
cosh−1
√
√
cosh−1
A2 − 1
,
A2 −1
Ω2
Ω1
.
(4.31)
(4.32)
Nótese que en el denominador aparece el término (Ω 2 /Ω1 ), mientras que en
el cálculo de n para los filtros de Butterworth fue (Ω 1 /Ω2 ).
Para encontrar la función de transferencia H(s) necesitamos encontrar
las raı́ces del polinomio
L2 (−s) = 1 + 2 Tn2 (Ω) = 0.
Recuérdese que Tn (Ω) = cosh(n cosh−1 Ω), y haciendo Ω = s/j, entonces
1 + 2 [cosh(n cosh−1 s/j)]2 = 0, y despejando tenemos
cosh(n cosh−1 s/j) =
q
−1/2 = ±j/
(4.33)
si s = σ + jΩ es un cero de L2 (−s), podemos escribir
cosh[n cosh−1 (−jσ + Ω)] = ±j/,
G. Miramontes, ISBN 968-5923-15-9
(4.34)
PDS: Introducción con teorı́a y práctica
98
4.3. LA APROXIMACIÓN DE CHEBYSHEV
haciendo
u + jv = cosh−1 (−jσ + Ω)
(4.35)
−jσ + Ω = cosh(u + jv),
(4.36)
cosh[n(u + jv)] = ±j/,
(4.37)
de (4.33)
y de la bien conocida identidad trigonométrica
cos(α + β) = cos α cos β − senαsenβ;
podemos escribir (4.37) como
±j/ = cos(nv) cosh(nu) + jsenh(nu)sen(nv) = −jσ + Ω.
(4.38)
Comparando ambos lados de esta ecuación,
σ = −sen(nv)senh(nu)
(4.39)
Ω = cos(nv) cosh(nu),
(4.40)
como ±j/ tiene parte real cero y parte imaginaria 1/, entonces
cos(nv) cosh(nu) = 0
sen(nv)senh(nu) = ±1/.
Como para una nu real, cosh(nu) es diferente de cero, entonces cos(nv) debe
ser cero, y entonces
v=
(ya que cos(π/2) = 0, cos
como sen(nv) = sen
π
2
π
2
+ kπ /n, k = 1, 2, . . .
π/2+kπ
n
(4.41)
= 0) para sen(nv)senh(nu) = ±1/, y
+ kπ /n = ±1, entonces
u=±
1
n
senh−1 (1/) .
(4.42)
De (4.39) (4.40) (4.41) y (4.42), se obtiene
σk = ±senh
1
senh−1
1 2k + 1 sen
π,
2n
n
2k + 1 1
Ωk = cosh
senh−1 cos
π, k = 1, 2, . . . , (n − 1),
n
2n
1
y podemos ver que
Ω2k
σk2
+
= 1,
senh2 (u) cosh2 (u)
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.3. LA APROXIMACIÓN DE CHEBYSHEV
99
es decir, los ceros de L2 (s) están localizados sobre una elipse. Los polos de
L2 (−s) están dados por
1
pk = Ωc senh
n
senh−1
1
2k + 1 1 2k + 1 1
senh−1 cos
sen
π + jΩc cosh
π.
2n
n
2n
Finalmente, la función de transferencia normalizada se puede formar
como
K
K
=
,
(4.43)
Hn (s) = Qn
(s
−
p
)
V
i
n (s)
i=1
donde
Vn (s) = sn + bn−1 sn−1 + . . . + b1 s + b0 ,
(4.44)
y además se puede comprobar que
K=
(
b0 ,
√ b0 ,
1+2
si n es impar
si n es par.
(4.45)
En las tablas 4.3, 4.4, y 4.5 se muestran los polinomios para filtros
Chebyshev tipo I para diferentes órdenes y niveles de rizo aceptable en la
banda pasante.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
100
4.3. LA APROXIMACIÓN DE CHEBYSHEV
Tabla 4.3: Polinomios de Chebyshev de orden n, para un rizo de 0.5 dB ( =
0.34931140018895).
orden
Kn y Vn (s)
orden
Kn y Vn (s)
n=1
Kn = 2.86277516124319
b0 = 2.86277516124319
n=2
n=3
Kn =0.71569379031080
b0 = 0.71569379031080
b1 = 1.53489545855561
b2 = 1.25291297268055
n=4
n=5
Kn = 0.17892344757770
b0 =0.17892344757770
b1 = 0.75251811034289
b2 =1.30957474478165
b3 = 1.93736749474810
b4 =1.17249093365202
n=6
n=7
Kn = 0.04473086189442
b0 = 0.04473086189442
b1 = 0.28207222652099
b2 = 0.75565110403040
b3 = 1.64790292616448
b4 = 1.86940790812050
b5 = 2.41265095657871
b6 = 1.15121757854778
n=8
G. Miramontes, ISBN 968-5923-15-9
Kn = 1.43138758062160
b0 = 1.51620262694593
b1 = 1.42562451364020
Kn = 0.35784689515540
b0 = 0.37905065673648
b1 = 1.02545527713700
b2 = 1.71686620544884
b3 = 1.19738565671119
Kn = 0.08946172378885
b0 = 0.09476266418412
b1 = 0.43236692045929
b2 = 1.17186133283420
b3 = 1.58976350135366
b4 = 2.17184462271973
b5 = 1.15917610630976
Kn = 0.02236543094721
b0 = 0.02369066604603
b1 = 0.15254443887580
b2 = 0.57356040094292
b3 = 1.14858936912993
b4 = 2.18401538172037
b5 = 2.14921726034592
b6 = 2.65674980658908
b7 = 1.14608010766183
PDS: Introducción con teorı́a y práctica
4.3. LA APROXIMACIÓN DE CHEBYSHEV
101
Tabla 4.4: Polinomios de Chebyshev de orden n, para un rizo de 1 dB ( =
0.50884713990959).
orden
Kn y Vn (s)
orden
n=2
n=1
Kn =1.96522672836027
b0 = 1.96522672836027
n=3
Kn = 0.49130668209007
b0 = 0.49130668209007
b1 = 1.23840917357824
b2 = 0.98834120988476
n=4
n=5
Kn =0.12282667052252
b0 = 0.12282667052252
b1 = 0.58053415132206
b2 = 0.97439607307168
b3 = 1.68881597917823
b4 = 0.93682013127199
n=6
n=7
Kn = 0.03070666763063
b0 = 0.03070666763063
b1 = 0.21367139021183
b2 = 0.54861981077436
b3 = 1.35754480295084
b4 =1.42879430819559
b5 = 2.17607847362704
b6 = 0.92312347346067
n=8
G. Miramontes, ISBN 968-5923-15-9
Kn y Vn (s)
Kn = 0.98261336418014
b0 = 1.10251032805385
b1 = 1.09773432856393
Kn = 0.24565334104503
b0 = 0.27562758201346
b1 = 0.74261937310676
b2 = 1.45392476228002
b3 = 0.95281137931914
Kn = 0.06141333526126
b0 = 0.06890689550337
b1 = 0.30708063841820
b2 = 0.93934552954141
b3 = 1.20214038896508
b4 = 1.93082492260129
b5 = 0.92825096024867
Kn = 0.01535333381531
b0 = 0.01722672387584
b1 = 0.10734472587535
b2 = 0.44782572369701
b3 = 0.84682432066278
b4 = 1.83690238444740
b5 = 1.65515567030966
b6 = 2.42302641920325
b7 = 0.91981130587012
PDS: Introducción con teorı́a y práctica
102
4.3. LA APROXIMACIÓN DE CHEBYSHEV
Tabla 4.5: Polinomios de Chebyshev de orden n, para un rizo de 2 dB ( =
0.76478310157921).
orden
Kn y Vn (s)
orden
n=2
n=1
Kn = 1.30756027157908
b0 = 1.30756027157908
n=3
Kn =0.32689006789477
b0 = 0.32689006789477
b1 = 1.02219033985978
b2 = 0.73782157715775
n=4
n=5
Kn =0.08172251697369
b0 = 0.08172251697369
b1 = 0.45934912106488
b2 = 0.69347695849584
b3 = 1.49954326711260
b4 = 0.70646056806109
n=6
n=7
Kn =0.02043062924342
b0 = 0.02043062924342
b1 = 0.16612634957256
b2 = 0.38263807763868
b3 = 1.14459656515260
b4 =1.03954580250709
b5 = 1.99366531716017
b6 = 0.69809070637012
n=8
G. Miramontes, ISBN 968-5923-15-9
Kn y Vn (s)
Kn = 0.65378013578954
b0 = 0.82306042667169
b1 = 0.80381643012779
Kn = 0.16344503394738
b0 = 0.20576510666792
b1 = 0.51679810179633
b2 = 1.25648193319480
b3 = 0.71621495822804
Kn = 0.04086125848685
b0 = 0.05144127666698
b1 = 0.21027055620056
b2 = 0.77146177104735
b3 = 0.86701492190888
b4 = 1.74585874591746
b5 = 0.70122570676988
Kn = 0.01021531462171
b0 = 0.01286031916675
b1 = 0.07293732194127
b2 = 0.35870427523376
b3 = 0.59822138558167
b4 = 1.57958072373214
b5 = 1.21171207766297
b6 = 2.24225292847038
b7 = 0.69606454940671
PDS: Introducción con teorı́a y práctica
4.3. LA APROXIMACIÓN DE CHEBYSHEV
103
Ejemplo 4.3.1 Diseñar un filtro pasa-bajas Chebyshev normalizado con
rizo de 2dB y una atenuación de 20 dB o mayor a una frecuencia de 1.5
rad/s en adelante.
Solución:
De las figuras 4.16 y 4.17 observamos que en Ω = Ω c = 1 se cumple la
1
1/(1+ε2)
1/(A2)
Ωr
1
Figura 4.16: Respuesta en frecuencia pasa-bajas Chebyshev n impar.
1
2
1/(1+ε )
2
1/(A )
1
Ω
r
Figura 4.17: Respuesta en frecuencia pasa-bajas Chebyshev n par.
siguiente relación:
1/2
1
20 log |H(j1)| = 20 log
1 + 2
1
= −2,
= 10 log
1 + 2
mientras que en Ω = Ωr
1 1/2 2
20 log |H(j1.5)| = 20 log A
10 log(1/A2 ) = −20.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
104
4.3. LA APROXIMACIÓN DE CHEBYSHEV
Resolviendo para en (4.46) obtenemos un valor para de 0.76478, y para
A en (4.46) obtenemos A = 10. Estos dos valores son necesarios en el cálculo
del orden n del filtro, ya que, aplicando (4.32) tenemos
n =
=
=
l cosh−1
√
A2 −1
cosh−1
cosh−1
m
Ω2
Ω1
√
99
m
l cosh−1 0.76478
l
m
4.3 = 5
1.3
1
Entonces requerimos de un filtro prototipo de Chebyshev de quinto orden
cuya función de transferencia está dada por:
H5 (s) =
s5
+
0.70646s4
+
0.081722
.
+ 0.69347s2 + 0.45934s + 0.08172
1.49954s3
La respuesta en frecuencia de H 5 (s) se muestra en la figura 4.18. Puede
observarse que se cumple el requerimiento de -2 dB a la frecuencia de corte
de 1 rad/s.
10
0
Ganancia en (dB)
−10
−20
−30
−40
−50
−60
0
10
Frecuencia (Hz)
Figura 4.18: Respuesta en frecuencia Chebyshev del ejemplo 4.3.1.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.4. CONSTRUCCIÓN DE TABLAS DE DISEÑO DE FILTROS
NORMALIZADOS
4.4.
105
Construcción de tablas de diseño de filtros
normalizados
Antes de continuar con algunos ejemplos de diseño de filtros Chebyshev,
conviene introducir una forma de construir tablas de diseño que pueden ser
muy útiles cuando no se tiene una tabla completa. Para esto haremos uso
de el ambiente de programación Matlab. Con esto se podrán obtener los
valores de filtros normalizados o no, tipo Butterworth, Chebyshev, Elı́pticos,
entre otros.
4.4.1.
Tabla de filtros de Butterworth usando Matlab
Los polinomios de Butterworth de la tabla 4.1 se pueden obtener usando
la siguiente instrucción:
[num,den]=butter(n,1,’s’)
donde n es el orden del filtro, 1 = Ωc y ’s’ indica analógico. Ası́ pues, para
diferentes valores de n tenemos los resultados que se muestran en la tabla
4.6.
4.4.2.
Tabla de filtros de Chebyshev usando Matlab
Los polinomios de Chebyshev son obtenidos usando la siguiente instrucción:
[num,den]=cheby1(n,e,1,’s’),
donde n es el orden del filtro, e es el rizo permisible en la banda de paso,
1 = Ωc y ’s’ indica analógico. Ası́ pues, para diferentes valores de n tenemos
las funciones de transferencia que se muestran en las tablas 4.7 a 4.9.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
106
4.4. CONSTRUCCIÓN DE TABLAS DE DISEÑO DE FILTROS
NORMALIZADOS
Tabla 4.6: Construcción de HBn (s)
orden n
Resultado de Matlab
n=1
1
num = 0 1
s+1
den = 1 1
n=2
num = 0 0 1
den = 1 1.4142 1
)
1
√
s2 + 2s + 1
n=3
num = 0 0 0 1
den = 1 2.0 2.0 1
)
s3
1
+ 2s + 1
+ 2s2
n=4
num = 0 0 0 0 1
den = 1 2.6131 3.4142 2.6131 1
=
n=5
s4
+
2.6131s3
)
HB4 (s)
1
+ 3.4142s2 + 2.6131s + 1
..
.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.4. CONSTRUCCIÓN DE TABLAS DE DISEÑO DE FILTROS
NORMALIZADOS
107
Tabla 4.7: Construcción de HChn (s) con rizo = 0.5 dB.
orden n
Resultados de Matlab
n=1
num = 0 2.8628
den = 1 2.8628
)
2.8628
s + 2.8628
n=2
num = 0 0 1.4314
den = 1 1.4256 1.5162
)
s2
1.4314
+ 1.4256s + 1.5162
n=3
num = 0 0 0 0.71569379
den = 1 1.2529129 1.5348954 0.71569379
=
)
0.7156
s3 + 1.25291s2 + 1.5348s + 0.7156
n=4
num = 0 0 0 0 0.35784689
den = 1 1.197385 1.7168662 1.0254552 0.379050
=
n=5
s4
+
1.1973s3
)
0.3578
+ 1.7168s2 + 1.0254s + 0.379
..
.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
108
4.4. CONSTRUCCIÓN DE TABLAS DE DISEÑO DE FILTROS
NORMALIZADOS
Tabla 4.8: Construcción de HChn (s) con rizo = 1 dB.
orden n
Resultados de Matlab
n=1
num = 0 1.96522
den = 1 1.96522
)
1.96522
s + 1.96522
n=2
num = 0 0 0.98261
den = 1 1.09773 1.102510
)
s2
0.98261
+ 1.09773s + 1.10251
n=3
num = 0 0 0 0.4913066
den = 1 0.9883412 1.238409 0.4913066
=
)
0.4913066
s3 + 0.9883412s2 + 1.238409s + 0.4913
n=4
num = 0 0 0 0 0.2456533
den = 1 0.9528113 1.453924 0.7426193 0.275627
=
n=5
s4
+
0.9528113s3
)
0.2456533
+ 1.453924s2 + 0.742619s + 0.27562
..
.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.4. CONSTRUCCIÓN DE TABLAS DE DISEÑO DE FILTROS
NORMALIZADOS
109
Tabla 4.9: Construcción de HChn (s) con rizo = 2 dB.
orden n
Resultados de Matlab
n=1
num = 0 1.307560
den = 1 1.307560
)
1.30756
s + 1.30756
n=2
num = 0 0 0.65378
den = 1 0.803816 0.823060
)
s2
0.65378
+ 0.803816s + 0.82306
n=3
num = 0 0 0 0.326890
den = 1 0.737821 1.0221903 0.32689
=
)
0.326890
s3 + 0.737821s2 + 1.0221903s + 0.32689
n=4
num = 0 0 0 0 0.1634450
den = 1 0.7162149 1.2564819 0.516798 0.2057651
=
n=5
s4
+
0.7162149s3
)
0.1634450
+ 1.256481s2 + 0.5167s + 0.2057651
..
.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
110
4.4. CONSTRUCCIÓN DE TABLAS DE DISEÑO DE FILTROS
NORMALIZADOS
Ejemplo 4.4.1 Diseñar un filtro pasa-bajas Chebyshev que tenga un rizo
de -2 dB en la banda pasante y una frecuencia de corte de 60 rad/s, con una
atenuación de 20 dB al menos en 80 rad/s.
Solución:
El procedimiento general es cambiar las especificaciones a un filtro (prototipo) pasa-bajas normalizado. Para esto calculamos la frecuencia crı́tica
2
Ωcr = Ω
Ω1 = 80/60 = 1.333. Luego diseñamos un filtro Chebyshev normalizado con 2 dB de rizo en 1 rad/s, y 20 dB de atenuación en 1.33 rad/s.
Entonces obtenemos n = 5, ası́ que de H C5 (s) del ejemplo 4.3.1 sólo necesitamos aplicar una transformación pasa-bajas −→ pasa-bajas con s = s/60.
En la figura 4.19 se muestra la respuesta en frecuencia para este caso.
10
5
Ganancia en (dB)
0
−5
−10
−15
−20
−25
−30
−35
−40 0
10
1
10
Frecuencia (rad/s)
2
10
Figura 4.19: Respuesta en frecuencia Chebyshev del ejemplo 4.4.1.
Ejemplo 4.4.2 Diseñar un filtro pasa banda (FPB) Chebyshev con las siguientes especificaciones: -2dB de rizo en la banda de frecuencias de 200 Hz
a 3.5 kHz, y -30 dB o mayor a frecuencias menores de 50 Hz y mayores de
10kHz.
Solución:
Comenzamos encontrando la frecuencia crı́tica para determinar el orden del
filtro prototipo.
Ω1 = 2π(50),
ΩL = 2π(200),
ΩU = 2π(3500),
Ω2 = 2π(10000),
A =
G. Miramontes, ISBN 968-5923-15-9
−Ω21 + ΩL ΩU
Ω1 (ΩU − ΩL )
PDS: Introducción con teorı́a y práctica
4.5. FILTROS ELÍPTICOS
111
= 4.2424
y
Ω22 − ΩL ΩU
Ω2 (ΩU − ΩL )
= 3.009.
B =
Ası́ pues, Ωcr = mı́n{|A|, |B|} = 3.009 y = 0.76478 mientras que A r =
√
10−k2/20 = 31.6277, y
√
l cosh−1 ( 31.622 − 1/0.76478) m
n =
cosh−1 (3.009)
=
l
m
2.4998 = 3.
La función prototipo será
Hn (s) =
0.3268
.
s3 + 0.7378s2 + 1.022s + 0.3268
Finalmente, aplicamos la transformación Pb→PB con
H(s) = Hn (s)
=
s2 +ΩL ΩU
U −ΩL )
s→ s(Ω
2.913957075 × 1012 s3
,
s 6 + b5 s 5 + b4 s 4 + b3 s 3 + b2 s 2 + b1 s + b 0
donde
b0 = 2.11044155 × 1022 ,
b1 = 1.1683170 × 1019 ,
b2 = 1.44354926 × 1016 ,
b3 = 3.75949469 × 1012 ,
b4 = 5.223647 × 108 ,
b5 = 1.5298369 × 104 .
En la figura 4.20 se muestra la respuesta en frecuencia para el filtro
pasa-banda del ejemplo 4.4.2.
4.5.
Filtros elı́pticos
Una clase de filtros que presentan una caı́da más pronunciada en la
banda de transición son los filtros elı́pticos. Éstos presentan rizo tanto en la
banda pasante como en la banda de rechazo, y un pequeño aumento en la
complejidad del cálculo de la función de transferencia.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
112
4.5. FILTROS ELÍPTICOS
10
0
Ganancia en (dB)
−10
−20
−30
−40
−50
−60
2
3
10
10
Frecuencia (Hz)
Figura 4.20: Respuesta en frecuencia Chebyshev pasa-banda del ejemplo 4.4.2.
Los filtros elı́pticos se basan en las propiedades de la función elı́ptica,
la cual fue analizada primero por Jacobi en 1829 y que ha sido estudiada
extensivamente en algunos tratados de matemáticas. Para nuestros propósitos es importante reconocer que la función elı́ptica jacobiana, denotada por
sn(u), es una función doblemente periódica de la variable compleja u, es
decir, periódica en Re{u}, y en Im{u}, y analı́tica en el plano-u, excepto en
los polos simples de la función. El patrón básico de dos ceros y dos polos se
repite infinitamente a lo largo de los dos ejes. El desarrollo matemático de
los filtros elı́pticos es algo más complicado que los polinomios de Chebyshev.
Un filtro elı́ptico se basa en una transformación de una función
T 2 (w) =
1
1+
2 sn2 (w, k)
,
(4.46)
desde el plano complejo-w al plano complejo-s, donde
w = sn−1 (z, k) =
Z
z=sn(w,k)
dt
p
(1 −
0
t2 )(1
− k 2 t2 )
(4.47)
es una integral elı́ptica de primera clase, z = sn(w, k) es una función elı́ptica,
k es el módulo y 0 < k < 1. Puede verse, a partir del patrón de ceros y polos
que para valores reales de w, T 2 (w) tiene un máximo en w = 2mK (m es
un entero) y un mı́nimo en w = (2m + 2)K (éste en el comportamiento que
se desea en la banda de paso) donde K es una constante dada por:
K = K(k) =
Z
1
0
dt
p
(1 −
t2 )(1
− k 2 t2 )
.
Es importante notar que a lo largo de Im(w) = K 0 , T 2 (w) = 0 en w =
2mK = jK 0 y T 2 (w) tiene un máximo en w = (2m + 1)K = jK 0 ; y ese es
el comportamiento en amplitud deseado en la banda de rechazo. Para más
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.5. FILTROS ELÍPTICOS
113
detalles sobre las propiedades de las funciones elı́pticas se puede consultar
la bibliografı́a indicada al final del capı́tulo.
El filtro elı́ptico normalizado tiene una respuesta en frecuencia dada por
|Hn (jΩ)|2 =
1
,
1 + 2 Rn2 (Ω)
(4.48)
donde Rn (Ω) es la función elı́ptica. Como en los filtros Chebyshev, tenemos dos casos, uno para n par y el otro para n impar. De igual manera es
conveniente emplear filtros normalizados como una base para obtener filtros
pasa-bajas, pasa-altas, pasa-banda, y rechazo de banda.
Para el filtro elı́ptico, Ω = 1 es la media geométrica de Ω 1 y Ω2 , es decir,
(Ω1 Ω2 )1/2 = 1.
El parámetro que representa lo pronunciado de la banda de transición está definido por la razón
Ωr = Ω2 /Ω1 .
La función de transferencia para el filtro elı́ptico pasa-bajas normalizado
está dada como sigue:
H0
Hn (s) =
(s + s0 )
(n−1)/2
Y
i=1
s2 + A0i
, n impar,
s2 + B1i + B0i
(4.49)
n/2
Hn (s) = H0
s2 + A0i
, n par.
s2 + B1i + B0i
i=1
Y
(4.50)
El filtro queda especificado determinando el orden n, H 0 , el polo simple
s0 , y los coeficientes A0i , B1i B0i . Estos parámetros son determinados a
partir de las especificaciones de diseño, , A, y Ω r , o por su equivalente Rp ,
Rr y Ωr , donde
Rp
Rs
1
= 20 log
= 20 log |Hn (jΩ1 )|,
(1 + 2 )1/2
= 20 log(1/A2 ) = 20 log |Hn (jΩ2 )|,
Rp = rizo en la banda de paso en dB,
Rr = rizo en la banda de rechazo en dB.
4.5.1.
Diseño de filtros elı́pticos analógicos en Matlab
Para el diseño de filtros elı́pticos se hará uso del ambiente de cómputo
Matlab donde la orden de entrada tiene la siguiente forma:
[num,den] = ellip(N,Rp,Rs,Wn,’s’),
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
114
4.5. FILTROS ELÍPTICOS
donde,
num = es el numerador, un polinomio en potencias decrecientes de s,
den = es el denominador, un polinomio en potencias decrecientes de s,
N = orden del filtro,
Rp = rizo en la banda de paso,
Rs = riso en la banda de rechazo,
Wn = frecuencia natural del filtro.
Si Wn es un vector de dos elementos Wn=[W1 W2], entonces se obtiene un
filtro pasa-banda de orden 2N, con una banda de paso W1 < W < W2.
Para obtener un diseño pasa-altas se emplea:
[num,den] = ellip(N,Rp,Rs,Wn,’high’,’s’).
Si, nuevamente, Wn es un vector de dos elementos, entonces se obtiene un
filtro rechazo-de banda con
[num,den] = ellip(N,Rp,Rs,Wn,’stop’).
El orden N del filtro y la frecuencia natural Wn, se obtienen con:
[N, Wn] = ellipord(Wp, Ws, Rp, Rs, ’s’),
donde
Wp = la frecuencia (final) de la banda de paso y
Ws = la frecuencia (inicial) de la banda de rechazo.
También se puede obtener el resultado en forma de ceros, polos y ganancia, empleando
[Z,P,K] = ellip(...),
donde los ceros estarán en un vector Z de N columnas, y los polos en un
vector P de N columnas. La ganancia K es un escalar. Para otras formas en
el resultado ver la guı́a del usuario de Matlab.
Ejemplo 4.5.1 Diseñar un filtro pasa-bajas elı́ptico con las siguientes especificaciones: frecuencia de corte de 1000 Hz con rizo de 3 dB, frecuencia
de rechazo a 2000 Hz con -60 dB de atenuación.
Solución:
Bajo el ambiente de Matlab definimos los siguientes valores y obtenemos
el orden del filtro introduciendo las siguientes lı́neas:
Wp = 2*pi*1000;
Ws = 2*pi*2000;
Rp = 3;
Rs = 60;
[N,Wn] = ellipord(Wp,Ws,Rp,Rs,’s’);
obteniendo el resultado siguiente:
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
4.5. FILTROS EL’IPTICOS
115
N = 5
Wn = 6.2832e+003.
Con este resultado introducimos:
[num,den] = ellip(N,Rp,Rs,Wn,’s’)
Ahora obtenemos la respuesta en frecuencia con:
[H,w] = freqs(num,den);\\
Mag = abs(H);
En lugar de emplear la función plot emplearemos la función semilogx para
obtener una mejor presentación en la gráfica de la respuesta en frecuencia.
Además, calculamos la ganancia en dB haciendo 20*log10( ). Ası́ pues
introducimos la siguiente orden
semilogx(w/(2*pi), 20*log10(Mag))
Si deseamos que aparezcan las unidades en los ejes, entonces introducimos:
xlabel(’Frecuencia (Hz)’)
ylabel(’Ganancia en (dB)’)
Finalmente, colocamos una rejilla para una mejor lectura de las ganancias
y frecuencias en los puntos importantes, con:
grid
La figura 4.21 muestra la gráfica de la respuesta en frecuencia, y puede
observarse que se cumple con las especificaciones de diseño.
10
0
−10
Ganancia en (dB)
−20
−30
−40
−50
−60
−70
−80
−90
−100 1
10
2
10
3
10
Frecuencia (Hz)
4
10
5
10
Figura 4.21: Respuesta en frecuencia del ejemplo 4.5.1.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
116
BIBLIOGRAFÍA
Bibliografı́a
[1] Gabel, R. A., Roberts, R. A., Señales y Sistemas Lineales, LIMUSA,1975.
[2] Haykin, S., Van Veen, B., Señales y Sistema, LIMUSA Wiley, 2001.
[3] Mitra, S. K., Digital Signal Processing: a computer based approach,
McGraw-Hill, 1998.
[4] Neff H. P. Jr., Continuous and Discrete Linear Systems, Harper & Row
Publishers, 1984.
[5] Oppenheim, A. V., Young, I. T., Señales y Sistemas, Prentice Hall
Hispanoamericana, 1994.
[6] Papoulis A., Signal Analysis, McGraw-Hill ISE, 1977.
[7] El-Sharkawy M., Digital Signal Processing Applications with the Motorola’s DSP56002 Processor, Prentice Hall PTR, 1996.
Problemas
Problema 4.1 La función del sistema H n (s) representa un filtro de Butterworth normalizado a 1 rad/s de orden-n. Para n = 5,
a) Escriba H5 (s) en forma polinomial y en forma factorizada.
b) ¿Cuál es la ganancia |H5 (s)| en Ω = 1?, ¿cuál es la ganancia en dB?
c) Repita los incisos anteriores 4.1a) y 4.1b) para un filtro Chebyshev
tipo I, con = 0.7647831.
Problema 4.2 Dado que G(s) = 1/(s 2 +
Butterworth normalizado de segundo orden,
√
2s + 1) representa un filtro
a) Dibuje 20 log |G(jω)| para Ω desde 0 a 100. ¿A qué frecuencia, en
rad/s, tiene una magnitud de -3 dB?, ¿a cuál tiene -20 dB?
b) Aplique una transformación Pb−→PA, s −→ 10/s, a la G(s) para
obtener un nuevo filtro H1 (s), y trace la gráfica de 20 log |H 1 (jΩ)|
para Ω de 0 a 100. ¿Tiene el nuevo filtro el comportamiento que se
esperaba? ¿a qué frecuencia en rad/s tiene la magnitud 3dB abajo?
¿cuál está 20 dB abajo?
c) Aplique la transformación s −→ 5s/(s 2 + 50) a G(s), para obtener un
nuevo filtro H2 (s). ¿Qué tipo de filtro resulta y cuáles son las frecuencias de interés? Dibuje 20 log |H 2 (jΩ)| para verificar sus conclusiones.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
BIBLIOGRAFÍA
117
Problema 4.3 Compruebe que Tn (−1) = (−1)n .
Problema 4.4 Calcule T5 (x) y T6 (x).
Problema 4.5 Demuestre que de
|Tn (Ω2 /Ωc )| =
√
A2 − 1
,
resolviendo para n, se obtiene
n=
cosh−1
√
cosh−1
A2 −1
Ω2
Ω1
.
Problema 4.6 Diseñe a) un filtro Butterworth, y b) un filtro Chebyshev
pasa-bajas analógicos que tengan una atenuación de 3 dB a una frecuencia
de corte de 100 rad/s y una atenuación de 25 dB o mayor para frecuencias
arriba de 250 rad/s. Dibuje 20 ∗ log |H(jΩ)| para los dos filtros y muestre
que se satisfacen los requerimientos a las frecuencias crı́ticas.
Problema 4.7 ¿Cuál es el orden n de un filtro Chebyshev pasa-bajas que
tiene una banda de paso desde 0 a 200 Hz con un rizo aceptable de 1dB y una
banda de rechazo monotónica con -40 dB en y más allá de 250 Hz? Repita
el diseño para un filtro Butterworth y compare las n’s. ¿A qué conclusiones
puede llegar?
Problema 4.8 Se desea diseñar un filtro pasa-bajas analógico que tenga
-0.5 dB a una frecuencia de corte de 75 Hz y que tenga más de 20 dB de
atenuación a frecuencias mayores a 150 Hz. Encuentre H(s) que satisfaga
esos requerimientos y dibuje 20 log |H(jΩ)| y arg H(jΩ) para
a) Filtro Butterworth (respuesta máximamente plana).
b) Filtro Chebyshev tipo I (equirizo en la banda de paso).
c) Filtro elı́ptico.
Compare el orden de cada filtro y comente sus resultados.
Problema 4.9 Diseñe un filtro analógico pasa-banda que satisfaga las siguientes especificaciones:
1.
Frecuencias de paso inferior y superior de 100 Hz y 3.8 kHz, respectivamente, con -3 dB de atenuación.
2.
Atenuación en la banda de rechazo de 20 dB a 20Hz y 8 kHz.
3.
Sin rizo en la banda de paso ni en la banda de rechazo.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica
118
BIBLIOGRAFÍA
Compruebe sus resultados dibujando 20 log |H(jΩ)| y arg H(jΩ).
Problema 4.10 Repita el Problema 4.9 para -3 dB a 50 Hz y 20 kHz, y
una atenuación de 20 dB en 10 Hz y 60 kHz.
Problema 4.11 Diseñe a) un filtro Butterworth, y b) un filtro Chebyshev
pasa-altas que permitan el paso de señales con frecuencias mayores a 100Hz
con una atenuación no mayor a 2 dB y tenga una atenuación mayor de 20
dB a frecuencias menores de 20 Hz.
Problema 4.12 Se encontró que un filtro tiene la siguiente función de
transferencia:
H(s) =
s
s+1
a) ¿Cuál es el orden del filtro?
b) Trace la gráfica de la respuesta en frecuencia en magnitud. Tome sólo
tres puntos de frecuencia: en Ω = 0.1 rad/s, 1 rad/s, y 10 rad/s.
c) ¿Qué tipo de filtro es éste?: FPb (filtro pasa-bajas), FPA (filtro pasaaltas), o FPB (filtro pasa-banda). ¿Podrı́a decirse que es un filtro normalizado?
Problema 4.13 Diseñe un filtro pasa bajas Chebyshev tipo 1 con las siguientes especificaciones:
a) Frecuencia de corte de 100 Hz, con -2 dB de rizo.
b) Frecuencia de rechazo de 1500 Hz con -30 dB de atenuación.
Problema 4.14 Se tiene un filtro analógico Butterworth normalizado de
segundo orden, es decir,
Ha (s) =
s2
1
√
.
+ 2s + 1
Realizar una transformación analógico-analógico para obtener un filtro analógico Butterwoth con respuesta en frecuencia Pasa Altas, con una frecuencia
de corte de 500 Hz.
Problema 4.15 Se tiene un filtro cuya función de transferencia está dada
por
H(s) =
s
s + 10
a)Encuentre la ganancia del filtro, |H(jΩ)| (en magnitud), y la fase theta(jΩ),
si Ω = 10 rad/s.
b) ¿Cuál es la frecuencia de corte de -3dB.
G. Miramontes, ISBN 968-5923-15-9
PDS: Introducción con teorı́a y práctica