Problemas resueltos - Departamento de Ingeniería de Sistemas y
Anuncio

Examen de la Asignatura:
Control e Instrumentación de Procesos Químicos
Junio 2009
3. h.
Problema 1
En la Figura 1 puede verse un dispositivo en el que un cierto producto adquiere una
viscosidad V tras ser procesado. Se conoce que la relación entre la viscosidad V, la
temperatura T de entrada del producto y la señal u al motor M viene dada por:
V
dV
+ VT = bu( t − 2)
dt
(1)
La temperatura T viene impuesta por el proceso anterior, pero la señal u puede ser
manipulada. Se sabe también que el sistema opera normalmente con un valor de u en
torno a 30% de su rango, valor para el cual, en condiciones estacionarias y con una
temperatura de entrada de 60ºC, la viscosidad vale 50, todo ello en el sistema de
unidades en que está expresada (1). (t tiempo en minutos)
u
V
T
M
Figura 1.
Se pide:
a) Proponer un esquema de regulación con nomenclatura ISA y dibujar el
correspondiente diagrama de bloques indicando las funciones de transferencia.
b) Sintonizar un regulador de la viscosidad de salida con el criterio de obtener una
respuesta ante cambios de temperatura en salto sin error estacionario y que minimice
los errores grandes en el punto de trabajo antes indicado.
c) En caso de que sea conveniente, diseñar un compensador feedforward de los
cambios de temperatura.
d) Si la temperatura cambia continuamente a razón de 2ºC por hora, ¿cual será el error
estacionario con el regulador antes diseñado?
e) Si, trabajando en lazo cerrado, la consigna de viscosidad experimentara cambios
sinusoidales de amplitud 2 unidades y periodo 2 minutos, ¿Cuál será la evolución de
la viscosidad al cabo de un cierto tiempo?
Problema 2
En el proceso de la figura, se desea procesar una cierta cantidad de un producto B que
debe mezclarse con otro A en un reactor con un relleno que opera endotérmicamente
para producir el producto C. En el reactor la temperatura debe mantenerse de modo que
en ningún punto del mismo esté por debajo de un cierto valor a pesar de posibles
perturbaciones.
El producto C de la reacción se concentra posteriormente en un evaporador de tipo
Robert en el que se desea mantener con precisión la densidad del concentrado. El vapor
de alimentación se comparte con un intercambiador de calor que permite calentar la
corriente A, y se sabe que el caudal total de vapor no puede manipularse y experimenta
cambios significativos. El condensador de la figura puede experimentar también
cambios de presión.
Se pide: Dibujar un diagrama de control e instrumentación con nomenclatura ISA que
cumpla con los requisitos antes mencionados y explicar su funcionamiento.
B
A
Condensador
Vapor
Condensado
C
Examen de la Asignatura:
Control e Instrumentación de Procesos Químicos
Junio 2009
1 h.
Cuestiones
1. ¿Qué es el diagrama de Nyquist de un sistema y para qué puede usarse?
2. ¿Qué se entiende por control de rango partido? Pon un ejemplo
3. ¿Qué puedes decir sobre el tipo de respuesta ante un salto en escalón en la
entrada que presentaría un sistema cuya función de transferencia fuera:
(s − 2)e−5s
s2 + 4s + 1
4. ¿Qué es un Grafcet? Explícalo brevemente
5. Si, partiendo de unas condiciones de equilibrio, un sistema al que se le da un
salto en la variable manipulada responde como en la figura, ¿Qué tipo de
modelo podría postularse para el mismo?
Step R espons e
0.5
0
Amplitude
-0.5
-1
-1.5
-2
-2.5
0
5
10
Time (sec)
15
Solucion problema 1
Se conoce que:
V
VT = bu
dV
+ VT = bu
dt
50 . 60 = b 30
b = 100
Linealizando el sistema en el punto de operación u = 30, V = 50, T = 60:
dV
+ VT − bu (t − 0.5) = 0
dt
dΔV
dΔV
+ (T0 +
)ΔV + V0 ΔT = 100Δu (t − 0.5)
V0
dt 0
dt
V
dΔV
+ 60ΔV = 100Δu (t − 0.5) − 50ΔT
dt
10e − 0.5 s
5
V (s) =
U ( s) −
T ( s)
5s + 6
5s + 6
50
T
D(s)
V(s)
U
G(s)
Diseño por Lopez con criterio MISE => porque quiero eliminar cambios en la
perturbación T(s), como no quiero errores estacionarios, un PI o un POD, y como quiero
minimizar errores grandes en el punto de trabajo: criterio MISE
d = 0.5
τ = 5/6 = 0.83
K= 10/6 = 1.6
PI => MISE => parte proporcional: a=1.305, b=-0.959
⎛d ⎞
K p K = a⎜ ⎟
⎝τ ⎠
b
τ
⎛d ⎞
= a⎜ ⎟
Ti
⎝τ ⎠
b
⎛d ⎞
= a⎜ ⎟
τ
⎝τ ⎠
Td
b
Para poder aplicar esto d/τ <1 => en nuestro caso: 0.5/0.83 = 0.6 <1 => se cumple
1.6 Kp = 1.305 * 0.6-0.959
=> Kp= 1.33
Integral => a=0.492 ; b= -0.739
0.833 / Ti = 0.492 * 0.6-0.739
=> Ti = 1.16
PI => U(s) = 1.33 ( 1 + 1/ 1.16s)
c) No es conveniente un feedforward => porque la salida del sistema afectado por las
perturbaciones es mucho más rápido que la función de transferencia del sistema G(S)
que tiene un retardo de 0.5 m.
d) Sistema en lazo cerrado:
T
D(s)
W
U
PI
V(s)
G(s)
Error estacionario:
1
D(s)
e ss = lim sE (s) = lim s(
W (s) T (s))
→
→
s 0
s 0
1 + G (s)R (s)
1 + G (s) R (s)
E (s) = −
1 + 1 .6 e
− 0. 5 s
0.9663s
− 5 /(5s + 6)
T (S ) =
T (s)
2
/(0.83s + 1) * 1.33(1 + 1 / 1.16 s )
0.9663s + 1.16 s + 2.12e − 05 s + 2.4592e −0.5 s s
Rampa => T(s)= 2ºC / hora = 2ºC/ 60 minutos = 0.033
T(t)=0.033 t
=> T(s)= 0.0333 / s2
e ss = lim sE ( s) = lim s
s →0
s →0
0.9663s
0.033 0.09633 * 0.033
=
= 0.4558
− 05 s
− 0.5 s
2.12
+ 2.4592e
s s2
0.9663s + 1.16 s + 2.12e
2
e) T= 2 minutos => w = 2π/T = π
Amplitud = 2 * | F(jw) |
Y ( s) =
G ( s) R( s)
D( s)
W (s) +
V (s)
1 + G ( s) R( s)
1 + G (s) R( s)
1.6e −0.5 s 1.33(1.16 s + 1)
(0.83s + 1)
1.16 s
F ( s) =
W ( s)
− 0. 5 s
1.6e
1.33(1.16 s + 1)
1+
(0.83s + 1)
1.16 s
Solución Problema 2
B
FC
FT
FF
LC
FC
FT
LT
A
TT
Condensador
TC
TT
LS
TT
PC
TC
PT
FY
FY
TT
FT
Vapor
Condensado
LT
C
DC
LC
DT
Problemas de la Asignatura “Control e Instrumentación de Procesos Químicos”
4º curso de Ingeniería Química
Problema 1
En el sistema de la figura pueden verse dos depósitos de almacenamiento, A y B, a los que
llega un líquido proveniente de ciertas fuentes de suministro. La salida del depósito B pasa por
un recalentador alimentado con vapor de calefacción y vierte en el depósito C donde también
vierte la salida del depósito A. Los líquidos deben mezclarse en cierta proporción. La mezcla
de ambos en el depósito agitado C se envía a otro proceso que impone el consumo de
determinadas cantidades variables con el tiempo. Dicha mezcla, además, debe enviarse a
temperatura constante mantenida con precisión a pesar de posibles perturbaciones. Se supone
que el líquido que llega a B y A lo hace a temperatura sensiblemente constante, por el
contrario, la presión de suministro de vapor de calefacción sufre cambios notables.
vapor
A
B
C
Se pide:
1) diseñar un sistema de regulación que cumpla los objetivos propuestos, colocando los
transmisores, actuadores y controladores necesarios.
2) justificar el diseño realizado explicando los objetivos del mismo y su funcionamiento.
Solución:
Se necesita implementar un sistema de control que cubra varios objetivos:
Mantener el nivel de los depósitos para evitar desbordamientos o situaciones de falta de algún
fluido para la mezcla
Mantener una proporción entre los flujos de A y B que se vierten en C
Mantener la temperatura en C a pesar de las perturbaciones de la presión de vapor y de los
cambios de caudales entrantes
Para ello se ha diseñado la estructura de la figura:
FY
vapo
PC
LC
PT
LC
LT
A
B
FT
FT
FF
FC
TC
TT
TC
LC
LT
C
TT
Como el caudal de salida de C está predeterminado, los controles de nivel LC en los tres
depósitos deben implementarse hacia atrás, manipulando la entrada a los depósitos. Podrían
diseñarse cascadas nivel-caudal, pero el nivel no es crítico y no parece necesario, por tanto.
Para mantener la proporción entre los caudales de entrada al depósito C, y teniendo en cuenta
que el caudal de salida de A lo determina el regulador de nivel de C, se mide dicho caudal y
se implementa un control ratio FF sobre el caudal de salida de B.
Para mantener la temperatura de C con precisión hay una cascada de reguladores de
temperatura: el regulador de temperatura de C fija la consigna del regulador de temperatura
de la corriente B, la única que puede alterarse. Dado que las corrientes A y B entran en una
cierta relación, esta parece ser una buena política, siendo importante poder mantener la
temperatura de B según se necesite. Para ello, se implementa una cascada adicional con un
regulador de presión de la cámara de calefacción del cambiador para absorver los cambios
LT
de presión de vapor y un feedforward con los cambios de caudal para adelantarse a corregir
su efecto.
Problema 2
Se desea realizar un sistema de control de temperatura de un cierto reactor químico
exotérmico, utilizando como actuador una válvula de regulación de refrigerante, tal como se ve
en la figura.
TC
TT
En un ensayo en lazo abierto se ha medido la respuesta temporal de la temperatura en ºC
cuando la señal de control a la válvula variaba en -20%, resultando ser la de la figura con la
escala temporal en minutos.
Se pide:
1) Diseñar un regulador que no presente error estacionario frente a cambios en escalón en la
referencia, que no presente sobrepico ante los mismos y que se estabilice en un tiempo no
superior a 3 minutos. Justificar el diseño realizado.
2) Si la referencia del regulador varia en rampa de pendiente 5 ºC /min. ¿Presentará el
sistema error estacionario?. En caso afirmativo calcularlo.
3) Dibujar el lugar de las raíces correspondiente a variaciones de la ganancia del regulador y
comentarlo.
Solución:
1) El sistema, dada la forma de su respuesta escalón, puede aproximarse por un sistema de
primer orden sin retardo, ya que es una respuesta estable sin inflexión en la respuesta ni
sobrepico.
G ( s) =
K
τs + 1
De acuerdo a los criterios de diseño, y teniendo en cuenta el tipo de modelo del proceso,
podemos escoger el método de sintonía denominado λ-tuning en el cual el criterio de diseño
es obtener un sistema que en lazo cerrado tenga una respuesta similar a la de la función de
transferencia:
1
λs + 1
la cual es sobreamortiguada. En nuestro caso, si se desea que el sistema en lazo cerrado se
estabilice en menos de 3 minutos, basta que la constante de tiempo λ cumpla con la relación
4λ=3 de modo que podemos escoger λ = 0.75 min.
El regulador, puesto que un sistema de primer orden como el de este proceso no tiene
integradores, deberá ser de tipo PI o PID. La tabla de sintonía de Rivera- Morari para un PI
mejorado proporciona los valores de los parámetros del regulador según:
Kp =
2τ + d
2K λ
Ti = τ +
d
2
Donde K es la ganancia, τ la constante de tiempo y d el retardo de un modelo de primer
orden con retardo que pueda representar al proceso en lazo abierto. En nuestro caso d=0, de
modo que se cumple la condición de validez de uso de la tabla:
λ
> 1 .7
d
El modelo de primer orden puede obtenerse de forma gráfica como puede verse en la figura.
La ganancia es el cambio de la salida dividido por el cambio de la entrada:
K=
2 .5
ºC
= −0.125
− 20
%
y la constante de tiempo puede calcularse, bien mediante el método de la máxima pendiente,
bien buscando en instante de tiempo en el que se alcanza el 63.2% del cambio final. Ambos
métodos dan valores muy parecidos τ = 1.2 min., de modo que:
G ( s) =
K
− 0.125
=
τs + 1 1 .2 s + 1
y los parámetros del regulador resultan:
Kp = -1.2/(0.75 0.125) = -12.8 % / ºC
Ti = 1.2 min
1.58
2.5
1.2
2) El error estacionario ante cambios en la referencia viene dado por:
E (s ) =
1
W (s )
1 + G (s) R (s )
Donde R(s) es la función de transferencia del regulador:
R (s ) = K p (1 +
de modo que:
T s+1
1
1.2s + 1
) = Kp ( i
) = −12.8
Ti s
Ti s
1.2s
1
W (s )
1 + G( s) R (s)
1
5
=
(−0.125) (−12.8)(1.2s + 1) s 2
1+
1.2s + 1
1.2s
5
e ss = lim sE(s ) =
= 2.14
s→ 0
1 + 1.33
E (s) =
y el sistema presentará un error estacionario de 2.14 ºC
3) El lugar de las raíces es un diagrama de las soluciones de la ecuación:
1+ Kp G(s)R(s) = 0
En nuestro caso:
1 + G (s) R (s ) = 1 +
s = 0.1042K p
y el diagrama es:
0.1042K p
( −0.125) K p (1.2s + 1)
= 1−
=0
1 .2 s + 1
1 .2 s
s
s
Examen de la Asignatura:
Control e Instrumentación de Procesos Químicos
Junio 2007
3.5 h.
Problema 1
En el proceso de la figura 1 puede verse un recipiente cerrado y aislado térmicamente de
10 l. de volumen que recibe un flujo q de un fluido, que sale por rebose, y se calienta
desde una temperatura Ti hasta otra T gracias a una resistencia eléctrica R alimentada
por una corriente continua I que procede de un amplificador. Este amplificador tiene
una entrada u que admite señales en el rango 4-20 mA y proporciona una salida de
corriente variable en el rango 0–8A. Se dispone también de un transmisor de
temperatura calibrado en el rango 10-60ºC y de un PID comercial que trabaja en
unidades de %.
Las propiedades del fluido son sensiblemente constantes en el rango de temperaturas de
operación y se sabe que cuando el sistema está en estado estacionario, el caudal de
entrada es de 2 l/min, la corriente del amplificador es de 4A y la temperatura de entrada
es de 20ºC, entonces la temperatura de salida es de 28ºC.
T
Ti
R
q
I
Amplificador
u
Se pide:
a) Calcular un modelo matemático del proceso que relacione las principales variables.
Se supondrá que el amplificador tiene una respuesta lineal y rápida.
b) Proponer un esquema de regulación con nomenclatura ISA y dibujar el
correspondiente diagrama de bloques indicando las funciones de transferencia.
c) Sintonizar un regulador de la temperatura de salida con el criterio de obtener una
respuesta ante cambios de referencia en salto sin error estacionario y con un tiempo
de asentamiento en lazo cerrado de 12min. en un entorno del punto de operación
antes indicado.
d) Si el caudal de entrada experimenta cambios sinusoidales como los de la figura 2,
(Tiempo en min.)¿Cómo evolucionará la temperatura de salida en lazo cerrado?
2.5
2.4
2.3
2.2
2.1
2
1.9
1.8
1.7
1.6
1.5
0
2
4
6
8
10
12
14
16
18
20
e) Si se aumenta la ganancia del regulador desde su valor de diseño, ¿Cómo
evolucionará la respuesta en lazo cerrado del sistema ante cambios en salto de la
temperatura de entrada?
Problema 2
En el esquema de la figura, se desea procesar ciertas cantidades del producto líquido A,
que requiere calentarlo hasta una temperatura de 90ºC en un horno alimentado por gas y
mantener el producto en un tanque un tiempo de residencia de 20 min. Se sabe que la
presión de suministro del gas experimenta cambios apreciables.
El horno calienta simultáneamente una corriente no manipulable de otro producto B que
debe mantenerse siempre a una temperatura superior a 80ºC y que se utiliza para
calentar una tercera corriente C hasta 40ºC, temperatura que debe mantenerse con
precisión a pesar de posibles perturbaciones en la corriente de calefacción.
Se pide:
Dibujar un diagrama de control del proceso, con la instrumentación adecuada y
nomenclatura ISA, y explicar su funcionamiento.
C
B
A
Aire
gas
Examen de la Asignatura:
Control e Instrumentación de Procesos Químicos
Junio 2007
1 h.
Cuestiones
a) ¿Podrias aplicar reguladores PID en el control de un sistema multivariable cuya
RGA fuera:? Razona la respuesta.
[ y1
y2
y3 ]
⎡ u1 ⎤ ⎡ 0.8 − 1,2 1.4 ⎤
⎢u 2⎥ ⎢− 1.2 0.9
1. 3 ⎥
⎥
⎢ ⎥⎢
1.3 − 1.7 ⎥⎦
⎢⎣u 3⎥⎦ ⎢⎣ 1.4
En caso afirmativo, ¿Cuál seria la mejor combinación de lazos entrada/salida?
b) ¿Qué es el lugar de las raíces y para qué se puede emplear?
c) ¿Qué puedes decir sobre el tipo de respuesta ante un salto en escalón en la entrada
que presentaría un sistema cuya función de transferencia fuera:
( s + 2)e −3 s ?
s2 + s +1
d) ¿Qué se entiende por robustez de un lazo de control? ¿Qué medidas de robustez
conoces?
e) ¿Bajo que condiciones se puede emplear una compensación en adelanto o
feedforward?
Solución Problema 1
a) Calcular un modelo matemático del proceso que relacione las principales variables.
Se supondrá que el amplificador tiene una respuesta lineal y rápida.
Un balance energético conduce a:
V
dT
I 2R
= q(Ti −T ) +
dt
ρce
con V, R, ρ, ce = cte.
8- 0
(um − 4) = 0.5(um − 4) con um en mA
20- 4
8 - 0 16
I=
u = 0.08 u con u en %
20- 4 100
I=
En estado estacionario:
R
42 R
0 = 2(20− 28) +
⇒
= 16/ 16 = 1
ρce
ρce
8−0
4=
(u − 4)
⇒ u0 = 12 mA= 50 %
20− 4
por tanto:
10
dT
= q(Ti − T ) + 0.0064 u2
dt
T en ºC u en %
b) Proponer un esquema de regulación con nomenclatura ISA y dibujar el
correspondiente diagrama de bloques indicando las funciones de transferencia.
T
Ti
TT
R
I
u
Amplificador
TC
Para calcular las funciones de transferencia hemos de linealizar previamente el modelo:
dT
= q(Ti −T ) + 6410−4 u 2
dt
f (T, T, T , q, I ) = 0
V
i
∂f ∂f
∂f
∂f
∂f
(T −T0 ) +
(T −T0 ) +
(Ti −Ti0 ) +
(q − q0 ) +
(u − u0 ) = 0
∂T 0
∂Ti
∂q
∂u 0
∂T
0
0
0
d ΔT
= −q 0 ΔT + q 0 ΔTi + (Ti 0 − T0 )Δq + 0.0128 u 0 Δu
dt
(T − T )
0.0128 u0
V d ΔT
+ ΔT = ΔTi + i 0 0 Δq +
Δu
q0 d t
q0
q0
V
d ΔT
+ ΔT = K1ΔTi + K 2 Δq + K 3 Δu
dt
d ΔT
5
+ ΔT = ΔTi − 4Δq + 0.32Δu
dt
y tomando transformadas de Laplace resultan las funciones de transferencia:
τ
K3
K1
K2
U ( s)
Ti ( s ) +
Q( s) +
τs + 1
τs + 1
τs + 1
T en ºC , u en %
−4
1
0.32
T ( s) =
Ti ( s ) +
Q( s) +
U (s)
5s + 1
5s + 1
5s + 1
T ( s) =
y como el span es 100/(60-10) = 2,
T ( s) =
2
0.64
−8
Ti ( s ) +
Q( s ) +
U ( s ) T en % del span, u en %
5s + 1
5s + 1
5s + 1
El diagrama de bloques es entonces:
Ti(s)
Q(s)
−8
5s + 1
w
E(s)
R(s)
U(s)
0.64
5s + 1
2
5s + 1
T(s)
c) Sintonizar un regulador de la temperatura de salida con el criterio de obtener una
respuesta ante cambios de referencia en salto sin error estacionario y con un tiempo de
asentamiento en lazo cerrado de 12min. en un entorno del punto de operación antes
indicado.
En función del objetivo de sintonía Podemos utilizar el criterio de λ-tuning o RiveraMorari IMC, con un PI o un PID. El λ deseado tendría que ser 12/3 = 4 min. el cual
cumple el mínimo λ > 0.2τ = 0.2 * 5 = 1
En nuestro caso el retardo es cero, luego el criterio de sintonía da:
2τ + d
5
=
= 1.953 % / %
2 Kλ
0.64 * 4
Ti = τ + d / 2 = 5 min
Kp =
R ( s ) = k p (1 +
siendo igual para un PID pues resulta Td = 0.
1
5s + 1
) = 1.953
Ti s
5s
d) Si el caudal de entrada experimenta cambios sinusoidales como los de la figura 2,
(Tiempo en min.)¿Cómo evolucionará la temperatura de salida en lazo cerrado?
2.5
2.4
2.3
2.2
2.1
2
1.9
1.8
1.7
1.6
1.5
0
2
4
6
8
10
12
14
16
18
20
La función de transferencia en lazo cerrado es:
D1 ( s)
D2 ( s)
G ( s) R( s)
W ( s) +
V1 ( s) +
V2 ( s)
1 + G ( s) R( s)
1 + G ( s) R( s)
1 + G ( s) R( s)
−8
2
0.64
5s + 1
1.953
5s + 1
5s + 1
5s
Q( s)
T ( s) +
W ( s) +
T ( s ) = 5s + 1
0.64
5s + 1
0.64
5s + 1 i
0.64
5s + 1
1+
1.953
1+
1.953
1+
1.953
5s + 1
5s
5s + 1
5s
5s + 1
5s
Y ( s) =
T (s) =
− 40s
Q( s)
(5s + 1)(5s + 1.235)
La frecuencia de oscilación es:
2*pi/5 = 1.256 rad/min
La respuesta será una sinusoide de frecuencia 1.256 rad/min, amplitud de oscilación
|G(jω)| y desfase arg G(jω):
T ( jω) =
− 40 jω
Q ( jω)
(5 jω + 1)(5 jω + 1.235)
− 40 1.256
− 40 jω
=
= 1.2344
(5 jω + 1)(5 jω + 1.235) (5 j1.256 + 1)(5 j1.256 + 1.235)
arg
1
1.235
− 40 jω
= −π / 2 − arctg
− arctg
= −1.9294 rad
(5 jω + 1)(5 jω + 1.235)
5ω
5ω
f) Si se aumenta la ganancia del regulador desde su valor de diseño, ¿Cómo
evolucionará la respuesta en lazo cerrado del sistema ante cambios en salto de la
temperatura de entrada?
Puesto que
2
10s
5s + 1
T (s) =
Ti ( s ) =
Ti ( s )
0.64
5s + 1
(5s + 1)(5s + 0.64k p )
kp
1+
5s + 1
5s
El sistema tiene un polo en -1/5, otro en -0.64kp/5 que irá haciéndose mas negativo, y
siempre será real, a medida que la ganancia kp aumente, así como un cero en 0.
Nótese que un cero en s=0 produce una respuesta que es la derivada de la misma
respuesta sin el cero. La respuesta si no hubiese cero seria la de un sistema de segundo
orden sobreamortiguado cada vez mas rápido que acercaría su respuesta a uno de primer
orden con constante de tiempo 5, y por tanto, con tiempo de asentamiento 15 min. Por
tanto ante un salto en la temperatura de entrada la respuesta será:
Sin cero
Con cero
Problema 2 Solución
C
B
TT
FT
TT
A
T
TC
FT
TY
Tm
TT
Aire
FT
FC
FF
τ/S
TC
FC
FT
HS
FC
FT
Gas
FF
LC
LT
FC
+
TC
Problemas de “Control e Instrumentación de Procesos Químicos”
4º Ingeniería Química
Problema 3
U
Ti
T
Cambiador
q
El sistema de la figura representa un cambiador de calor con un sistema de calefacción interno
no manipulable que calienta un flujo q de agua desde una temperatuta Ti a una temperatura T.
Para este sistema se sabe que la relación entre la señal de control a la válvula de entrada U en
% y la temperatura de salida T en ºC (tiempo en minutos) viene dada por:
3
dT
= −6T + 8.8U 2 + 2Ti
dt
y que cuando el sistema está en estado estacionario y la temperatura de entrada es de 10 ºC,
la de salida es de 40ºC.
Se pide:
1) Dibujar sobre el esquema un sistema de control de temperatura
2) Suponer que el regulador es de tipo PI, dibujar un diagrama de bloques y calcular la
función de transferencia en lazo cerrado despreciando la dinámica del transmisor.
3) Si la ganancia del regulador es 0.1 y el tiempo integral es de 1min estudiar la estabilidad del
sistema y la forma de la respuesta ante un salto escalón en la referencia.
4) Calcular el error estacionario frente a un salto de 0.2 ºC en la temperatura de entrada de
líquido.
1) Para controlar la temperatura la única posibilidad es actuar sobre el flujo de líquido a
través de la válvula, luego el sistema de control deberá ser como en la figura, donde se ha
instalado un transmisor de temperatura y un controlador que manipula la válvula:
TT
TC
U
Ti
Cambiador
q
T
2) Para poder establecer un diagrama de bloques y calcular la función de transferencia en
lazo cerrado hay que calcular la función de transferencia del proceso. Ello ha de hacerse
linealizando el modelo matemático que relaciona la temperatura T con la apertura de la
válvula y la temperatura Ti :
3
dT
= −6T + 8.8U 2 + 2Ti
dt
Para ello comenzaremos calculando un punto de linealización estacionario. De acuerdo a los
datos del problema se conoce que cuando la temperatura de entrada es de 10 ºC, la de salida
es de 40ºC en equilibrio, de modo que:
0 = −6 * 40 + 8.8U 20 + 2 *10
U 0 = ( 240 − 20) / 8.8 = 5 %
T0 = 40 º C
Ti 0 = 10 º C
Desarrollando en serie de Taylor:
3
3
dT
= −6T + 8.8 U 2 + 2Ti
dt
d ∆T
= −6∆T + ( 2 * 8.8U 0 ) ∆U + 2∆Ti
dt
= −6∆T + 88∆U + 2 ∆Ti
con ∆T = T - T0
∆U = U − U 0
∆Ti = Ti - Ti0
de modo que tomando transformadas de Fourier a ambos lados del signo igual, resulta:
3s∆T( s) = −6 ∆T (s) + 88∆U(s ) + 2∆Ti (s )
3s∆T( s) + 6∆T(s ) = 88∆U(s ) + 2∆Ti (s )
∆T( s) =
88
2
∆U( s) +
∆T (s)
3s + 6
3s + 6 i
y ahora, teniendo en cuanta que la función de transferencia de un regulador PI es:
K p (1 +
1
)
Ti s
es posible dibujar el diagrama en lazo cerrado:
∆Ti
w
error
1
K p (1 +
)
Ti s
∆U
2
3s + 6
88
3s + 6
∆T
y calcular la función de transferencia en lazo cerrado:
∆T( s) =
T s+1
88
2
88
2
∆U( s) +
∆Ti (s) =
Kp ( i
)( W (s) − ∆T(s )) +
∆T ( s)
3s + 6
3s + 6
3s + 6
Ti s
3s + 6 i
88
Tis + 1
88
Ti s + 1
2
1 + 3s + 6 K p ( T s ) ∆T(s ) = 3s + 6 K p ( T s ) W (s ) + 3s + 6 ∆Ti (s )
i
i
T s+1
88
2
Kp ( i
)
3s + 6
Ti s
3s + 6
∆T( s) =
W (s ) +
∆Ti ( s) =
88
T s +1
88
T s+1
1+
Kp ( i
)
1+
Kp ( i
)
3s + 6
Tis
3s + 6
Ti s
K p 88( Tis + 1)
2Tis
=
W (s) +
∆Ti ( s)
(3s + 6) Ti s + K p 88( Tis + 1)
( 3s + 6) Tis + K p 88(Ti s + 1)
3) Dando valores a los parámetros del PI según el enunciado:
8.8( s + 1)
2s
W( s) +
∆T (s) =
(3s + 6)s + 8.8(s + 1)
(3s + 6)s + 8.8(s + 1) i
8.8(s + 1)
2s
= 2
W( s) + 2
∆Ti ( s)
3s + 14.8s + 8.8
3s + 14.8s + 8.8
∆T( s) =
y la estabilidad en lazo cerrado puede calcularse mediante las raíces de:
3s 2 + 14.8s + 8.8 = 0
− 14.8 ± 14.8 2 − 4 3 8.8
=
= −0.69, − 4.24
6
s 1, 2
como ambas son reales y negativas la respuesta ante un cambio en la referencia seriá estable y
sin oscilaciones, con un punto de inflexión, aunque no muy acusado debido a que hay un polo
(-4.24) bastante mas rápido que el otro (-0.69). El tiempo de asentamiento lo impondrá el
polo mas lento y será del orden de 3/0.69 = 4.34 min para un criterio del 5% (4/0.69 = 5.79
min para un criterio del 1%). Sin embargo, como además el sistema tiene un cero en lazo
cerrado en s= -1, se producirá un adelantamiento de la misma. La ganancia es 1. La
respuesta total se ve en la figura.
Step Response
From: U(1)
1
0.9
0.8
0.6
To: Y(1)
Amplitude
0.7
0.5
0.4
0.3
0.2
0.1
0
0
1.4
2.8
4.2
5.6
Time (sec.)
4) Para calcular el error estacionario ante un cambio de 0.2 ºC en Ti :
7
− D(s )
− 2s
0.2
∆Ti (s ) = 2
1 + G( s) R (s)
3s + 14.8s + 8.8 s
− 2s
0.2
e ss = lim sE(s ) = lim s 2
=0
s→ 0
s →0 3s + 14.8s + 8.8 s
E (s) =
y no habrá error estacionario.
Problema 4
A
vapor
B
Reactor
Cambiador
En la figura se representa un reactor químico endotérmico en el que dos productos A y B
reaccionan a una cierta temperatura para formar el producto C, el cual, tras calentarse en el
intercambiador de calor, se almacena transitoriamente en un depósito. El líquido sale por
rebose de la cámara de reacción por lo que siempre está llena de productos, mientras que la
cámara de calefacción recibe un vapor cuya presión experimenta fuertes cambios y sale como
condensado. El caudal del producto B no es manipulable.
Diseñar un sistema de control tal que sea capaz de mantener con precisión la temperatura final
del producto C, así como su concentración. Colocar la instrumentación, transmisores y
actuadores, necesarios y explicar su funcionamiento.
Solución:
FT
FC
FF
FT
A
B
TC
TC
TT
TT
vapor
Reactor
AC
AT
TT
PC
PT
Cambiador
LT
TC
LC
Los objetivos que deben cubrirse son:
• Mantener en el nivel en el depósito, como debe hacerse en todos ellos.
• Dado que se trata de una reacción química, mantener las proporciones en la entrada de
productos al reactor.
• Mantener la temperatura del reactor exotérmico para asegurar una adecuada operación a
pesar de los cambios en la presión del vapor de calefacción
• Mantener la temperatura requerida en el producto C
• Mantener la concentración del producto C
Para ello se ha diseñado un esquema de control como el de la figura. Dado que el caudal del
producto B no es manipulable, implementaremos el control de proporciones de productos A y
B como un ratio sobre B, manejando el caudal de A.
Esto hace que el caudal de salida del reactor venga impuesto, y la única alternativa para
instalar el control de nivel del depósito es actuando sobre su salida.
El control de temperatura del reactor se implementa como una cascada con un lazo interno de
control de temperatura de la camisa, a fin de absorber mas rápidamente en este último las
variaciones de presión de vapor de suministro.
El control de temperatura de C tras el cambiador se implementa también como otra cascada
cuyo lazo interno es uno de presión de vapor por la misma razón.
El control de composición de C se realiza utilizando un analizador para su medida y actuando
sobre la proporción de ambos productos, que puede de este modo corregirse si la
composición de C no es la adecuada.
Nótese que tanto la temperatura como la composición de C podrían medirse en el depósito,
esto incluiría en el lazo de control las posibles perturbaciones que se produjeran en el mismo y
actuaría como un filtro para cambios rápidos, aunque también introduciría un elemento mas
lento que haría menos ágil la respuesta del sistema.
Problemas de “Control e Instrumentación de Procesos Químicos”
4º Curso de Ingenieria Química
Problema 5
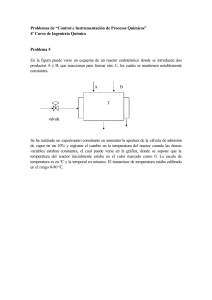
En la figura puede verse un esquema de un reactor endotérmico donde se introducen dos
productos A y B, que reaccionan para formar otro C, los cuales se mantienen notablemente
constantes.
A
B
T
valvula
Se ha realizado un experimento consistente en aumentar la apertura de la válvula de admisión
de vapor en un 10% y registrar el cambio en la temperatura del reactor cuando las demas
variables estaban constantes, el cual puede verse en la gráfica, donde se supone que la
temperatura del reactor inicialmente estaba en el valor marcado como 0. La escala de
temperatura es en ºC y la temporal en minutos. El transmisor de temperatura estába calibrado
en el rango 0-80 ºC.
r
60
50
40
30
20
10
0
0
5
10
15
Se pide:
1) Calcular un modelo dinámico que relacione la temperatura del reactor con la apertura de
la válvula, utilizando para la ganancia unidades %/%.
2) Calcular el tiempo de asentamiento y la frecuencia de oscilación y comparalas con los
valores que pueden estimarse a partir del modelo.
3) Diseñar el regulador de temperatura mas sencillo que proporcione las siguientes
características: sin error estacionario, sin o con muy poco sobrepico y con un tiempo de
asentamiento del orden de 5 min.
Solución:
1) Dado que la única información es la respuesta a un ensayo en salto, utilizaremos dicha
gráfica para deducir un modelo lineal aproximado. De la forma de la respuesta, con
sobrepico y oscilación y sin retardo, se deduce que podemos escoger un modelo de
segundo orden del tipo:
Kω 2n
s 2 + 2δωn + ω2n
r
6
8.5
5
4
3
5%
La ganancia K se calcula mediante el cociente entre el cambio en temperatura en estado
estacionario, 50ºC, y el cambio en la apertura de la válvula 10%. Como se piden unidades en
%/%, debemos convertir los 50ºC a escala de % teniendo en cuenta que 80ºC son el 100%
del transmisor.
K = (50 100 / 80) / 10 = 6.25 % / %
Para calcular el valor del amortiguamiento δ usaremos la medida del sobrepico. El valor del
sobrepico es de 8.5 ºC y en % sobre el valor final: 8.5 100 /50 = 17 % y se sabe que la
relación de este valor con el amortiguamiento viene dada por:
− δπ
100e
1− δ 2
por tanto:
−δπ
e
1− δ 2
= 0.17; ln( 0.17 ) =
− δπ
1− δ2
; ( −1.772) =
2
δ2π2
1− δ2
1.318δ = 0.318; δ = 0.491
2
Un valor similar de δ puede obtenerse de las gráficas %M / δ
Para calcular la frecuencia propia no amortiguada ωn, usaremos el tiempo de pico. El tiempo
de pico es de 3.53 min y se sabe que viene relacionado con los parámetros de la función de
transferencia por:
π
tp =
ωn 1 − δ2
por tanto:
π
3.53 =
; ω n = 1.02
ωn 1 − 0.4912
y la función de transferencia resultante entre los cambios de temperatura y de posición de la
valvula resulta ser en % / %:
6 .5
s + s + 1.04
2
2) El periodo de oscilación obtenido de la gráfica es aproximadamente de 2(7.5 – 3.53) =
7.94 min. Con lo que la frecuencia de oscilación será: 2π/7.94 = 0.79 rad/min. Siendo dificil
hacer las medidas con precisión en la gráfica por la forma plana de la oscilación descendente.
Del mismo modo, el tiempo de asentamiento del 5% obtenido de la gráfica es
aproximadamente de 5.5 min.
Los valores calculados del modelo son:
ω r = ω n 1 − δ 2 = 1.02 1 − 0.49 2 = 0.89rad / min
δωn = 0.49 1.02 = 0.5; 3 / 0.5 = 6 min
que son valores próximos a los medidos. En particular, téngase en cuenta que el cálculo del
tiempo de asentamiento mediante 3/δωn en sistemas de segundo orden es solo una expresión
aproximada. También debe tenerse en cuenta que la respuesta de la gráfica se está
aproximando por la de un sistema de segundo orden, pero en el enunciado no se dice que sea
exactamente un sistema de segundo orden.
3) Para diseñar el regulador pedido debemos escoger en primer lugar su tipo. Teniendo en
cuenta que el proceso no tiene integradores, para eliminar el error estacionario se necesitará
un regulador PI o PID. Por otra parte, dado el tipo de función de transferencia y las
especificaciones de diseño, no es posible aplicar las reglas de Ziegler-Nichols ni las tablas de
Rovira, Lopez o Morari. Un procedimiento de diseño aplicable es obtener un margen de fase
(relacionado con el sobrepico) a una frecuencia dada (relacionada con la velocidad de
respuesta). Si se desea que el sistema en lazo cerrado tenga un ligero o ningún sobrepico
puede tomarse un margen de fase de unos 55º. Para estimar la frecuencia a la que se quiere
obtener este margen de fase para el conjunto proceso-regulador, dado que el tiempo de
asentamiento requerido es un poco inferior al de lazo abierto, tomaremos una frecuencia
ligeramente superior a la de corte en lazo abierto.
Dado que en nuestro caso la función de transferencia es:
6 .5
6.25 1.04
= 2
s + s + 1.04 s + s + 1.04
2
y sabemos que para una función de transferencia:
ω 2n
s 2 + 2δωn + ω2n
la frecuencia de corte está aproximadamente en la frecuencia ωn, podemos hacer el diseño
respecto a esta función de transferencia para la que podemos estimar dicha frecuencia, y
dividir luego la ganancia del regulador resultante por 6.25 .No obstante, dado que el valor de
la ganancia del proceso solo interviene en el denominador de la fórmula de cálculo de la
ganancia Kp del regulador, (como puede verse en las fórmulas que figuran mas abajo) es igual
usar para ellas la función de transferencia del proceso que incluye la ganancia 6.25 y no
dividir despues por este factor. En el diseño, por tanto escogeremos una frecuencia
ligeramente superior a ωn = 1.02, por ejemplo ωf = 1.2 rad/min.
En el caso de un PI, se trata de conseguir unos valores de la ganancia y el tiempo integral del
regulador tales que el margen de fase de G(jω)R(jω) sea 55º a la frecuencia 1.2
O
-
φ
ω
G(jω)R(jω)
La solución, de acuerdo a la teoría, viene dada por las expresiones:
θ = π − φ + arg[G ( jω f )]
Ti =
1
ω f tgθ
Kp =
cos θ
G ( jω f )
Donde
G ( jω f ) =
6 .5
( j ωf ) 2 + j ωf + 1.04
[
=
6 .5
( j1.2) 2 + j1.2 + 1.04
= 5.14
]
arg [G( j ωf ) ] = − arg ( j1.2) 2 + j1.2 + 1.04 = −1.89 rad
55π
− 1.89 = 0.29 rad
180
1
Ti =
= 2.8 min
1.2tg ( 0.29)
θ= π-
Kp =
cos 0.29
= 0.19 % / %
5.14
Una vez obtenidos los parámetros del regulador PI, y dado que no existe una relación exacta
para el sistema resultante de tercer orden con un cero, con el tiempo de asentamiento, seria
conveniente comprobar en simulación que el sistema en lazo cerrado obtenido cumple las
especificaciones.
Otra alternativa de diseño es un procedimiento de síntesis directa. Si tomamos como
comportamiento deseado en lazo cerrado una función de transferencia de primer orden
(sobreamortiguada) con ganancia unidad y constante de tiempo λ = 5/3 = 1.66, podemos
calcular el regulador R(s) que da en lazo cerrado esa función M(s):
G( s) =
1
1
M (s) =
=
λs + 1 1.66s + 1
R (s ) =
M( s)
=
G (s)(1 − M (s ))
Kω2n
6.5
= 2
2
2
s + 2δωns + ω n s + s + 1.04
1
λs + 1
Kω 2n
1
(1 −
)
2
2
s + 2δωn s + ωn
λs + 1
=
s 2 + 2δωn s + ω2n
=
Kω 2n ( λs + 1 − 1)
s 2 + 2δωn s + ω2n s 2 / ω2n + (2δ / ωn )s + 1
=
=
=
Kω 2n λs
Kλs
=
2δ (2δ / ωn )(1 / 2δωn )s 2 + (2δ / ωn )s + 1
ω n Kλ
( 2δ / ω n )s
Kp =
K p ( TiTds2 + Tis + 1)
PID ideal =
Tis
Igualando términos a un PID ideal
y sustituyendo: Kp = 0.093, Ti = 0.96 Td = 0.998
2δ
ω n Kλ
Ti =
2δ
ωn
Td =
1
2δωn
Problema 6
El proceso de la figura representa un horno de calentamiento de un material, que entra a
temperatura Ti y debe salir a temperatura T. En el horno se puede manipular el flujo F de
elemento calefactor para hacer que la temperatura final T del material alcance los valores
deseados.
Ti
Horno
T
F
Se sabe que la relación entre la temperatura T, la temperatura de entrada del material Ti y el
flujo F viene dada por:
dT
(5 + 3F)
+ 2 T2 = 3FT + Ti
dt
con T y Ti en ºC, F en Kg/min y el tiempo en minutos, y que cuando el sistema esta en estado
estacionario a 40ºC la temperatura de entrada en de 10ºC. Se pide:
1) Obtener la función de transferencia del sistema en ese punto de trabajo.
2) Para la regulación del sistema se utiliza un regulador PI de ganancia 0.1 %/ºC y tiempo
integral 20 segundos. Se conoce que la relación entre la señal de control U del regulador
en % y el flujo F en Kg/min es F=U. Dibujar el diagrama de regulación del proceso y el
diagrama de bloques correspondiente en lazo cerrado, y estudiar la estabilidad del
sistema.
3) Calcular la ganancia del regulador para que el sistema se coloque en el límite de
estabilidad.
4) Para un cambio en rampa en la temperatura Ti de 2ºC/min. calcular el error estacionario
con los parámetros de sintonía del apartado 2).
5) Si los cambios en Ti son significativos, ¿Como diseñarias un compensador en adelanto
que mejorara el funcionamiento del sistema?. Calcúlalo y dibuja el esquema
correspondiente.
Solucion:
1) Dado que el modelo del sistema es no lineal, para obtener la función de transferencia entre
la salida T, la entrada F y la posible perturbación Ti debemos linealizar dicho modelo. El punto
de linealización, de acuerdo al enunciado, es el punto de equilibrio que verifica:
2T 2 = 3FT + Ti ;
2 40 2 = 3F0 40 + 10;
F0 = 3190 / 120 = 26.6 Kg / min
con lo que dicho punto de linealización resulta ser:
T0 = 40ªC,
F0 = 26.6 Kg/min, Ti0 = 10ªC,
dT
donde hemos usado la notación T& =
dt
T& 0 = 0
La ecuación del modelo es función de F, Ti, T y su derivada T& , y puede linealizarse usando
una expansión de Taylor:
(5 + 3F)
dT
2
+ 2T − 3FT − Ti = 0
dt
f (T& , T, F, Ti ) = 0
la linealizac ión es una expresión del tipo :
∂f
∂f
∂f
∂f
∆T& +
∆T +
∆F +
∆Ti = 0
∂T& 0
∂T 0
∂F 0
∂Ti 0
donde ∆T& = T& - T& 0 ; ∆T = T - T0 ; ∆F = F - F0 ; ∆Ti = Ti - Ti0 ; con lo que :
(5 + 3F0 )∆T& + ( 4T0 − 3F0 ) ∆T + (3T& 0 − 3T0 ) ∆F − ∆Ti = 0
84.8
d ∆T
+ 80.2∆T = 120 ∆F + ∆Ti
dt
Tomando ahora transformadas de Laplace a ambos lados de esta ecuación linealizada, y
teniendo en cuenta que, si en el instante inicial el proceso está en equilibrio, los valores iniciales
de los incrementos serán nulos:
d ∆T
84.8L
+ 80.2 L{∆T} = 120L{∆F} + L{∆Ti }
dt
84.8sT (s) + 80 .2T(s ) = 120 F( s) + Ti (s) donde T(s) = L{∆T}, F( s) = L{∆F}, Ti (s) = L{∆Ti }
(84.8s + 80.2)T (s) = 120F(s ) + Ti ( s)
y la función de transferencia resulta ser:
T( s) =
120
1
1 .5
0.0125
F(s ) +
Ti (s ) =
F( s) +
Ti (s )
84.8s + 80.2
84.8s + 80.2
1.06s + 1
1.06s + 1
2) El diagrama de regulación es:
T
Ti
Proceso
TT
F
U
TC
y el diagrama de bloques:
Ti
W
E
1
0.1(1 +
)
(20 / 60)s
U
F
1
0.0125
1.06s + 1
T
1 .5
1.06s + 1
La función de transferencia en lazo cerrado puede calcularse como:
G(s ) R( s)
D(s)
W (s ) +
Ti (s ) =
1 + G( s) R (s)
1 + G( s) R (s)
1.5 0.1s + 0.3
0.0125
s
1.06s + 1
= 1.06s + 1
W (s ) +
T (s ) =
1.5 0.1s + 0.3
1.5 0.1s + 0.3 i
1+
1+
1.06s + 1
s
1.06s + 1
s
0.15s + 0.45
0.0125s
=
W( s) +
Ti ( s)
2
2
1.06s + 1.15s + 0.45
1.06s + 1.15s + 0.45
T( s) =
y la estabilidad en lazo cerrado puede estudiarse calculando los polos en lazo cerrado, esto
es, las raices de:
1.06s + 1.15s + 0.45 = 0;
s=
− 1.15 ± 1.15 2 − 4 1.06 0.45
= −0.54 ± j0.36
2 1.06
como la parte real de ambos polos es negativa, el sistema será estable en lazo cerrado.
2
3) Si la ganancia del regulador fuera variable en lugar de 0.1, la función de transferencia en
lazo cerrado seria:
1 .5
s+3
0.0125
Kp
s
1.06s + 1
T( s) = 1.06s + 1
W( s) +
T (s ) =
1 .5
s+3
1 .5
s+3 i
1+
Kp
1+
Kp
1.06s + 1
s
1.06s + 1
s
1 .5 K p s + 4 .5 K p
0.0125s
=
W (s ) +
Ti (s)
2
2
1.06s + (1 + 1.5K p )s + 4.5K p
1.06s + (1 + 1.5K p )s + 4.5K p
y la estabilidad vendria dada en función de las raices de:
1.06s + (1 + 1.5K p )s + 4.5K p = 0; s =
2
− 1 − 1.5K p ± (1 + 1.5K p ) 2 − 4 1.06 4.5K p
2 1.06
las raices serán reales si se verifica:
(1 + 1.5K p ) 2 − 4 1.06 4.5K p ≥ 0; o sea : 1 + 2.25K 2p − 16.08K p = 0
Kp =
16.08 ± 16.08 2 − 4 2.25 1
4 .5
=
16.08 ± 15.79
= 7.08; 0.0627
4 .5
o sea entre Kp = 0.0627 y 7.08 las raices s serán imaginarias y la condición de estabilidad
sería que la parte real de las mismas fuera negativa, o sea debería cumplirse:
− 1 − 1.5K p ≤ 0; K p ≥ −2 / 3 de modo que en este rango de valores de Kp el sistema seria
siempre estable. Fuera del rango de Kp [0.0627, 7.08], las raices s en lazo cerrado son reales
y la condición de estabilidad es:
− 1 − 1.5K p ± (1 + 1.5K p ) 2 − 4 1.06 4.5K p ≤ 0;
para lo cual el valor absoluto del radicando debe ser menor en valor absoluto que 1+1.5Kp lo
cual se cumple para cualquier Kp positivo, de modo que el sistema sera estable para cualquier
Kp>0
Alternativamente
podría
haberse
usado
el
2
1.06s + (1 + 1.5K p )s + 4.5K p = 0 que conduce a:
1.06
1 + 1.5K p
4.5K p
criterio
de
Root
para
4.5Kp >0 ; 1+1.5Kp > 0 o sea Kp>0
4) El error estacionario ante un cambio en rampa en Ti de 2ºC/min puede calcularse mediante
la correspondiente función de transferencia:
1
D( s)
W(s ) −
Ti (s) =
1 + G( s) R (s)
1 + G(s ) R(s )
0.0125
−
− 0.0125s
2
1.06s + 1
=
Ti (s ) =
2
1.5 0.1s + 0.3
(1.06s + 1.15s + 0.45) s 2
1+
1.06s + 1
s
− 0.0125s
2 − 0.0125 2
e ss = lim s
=
= −0.055
2
s → 0 (1.06s + 1.15s + 0.45) s 2
0.45
E (s) =
5) Un compensador en adelanto puede utilizarse, puesto que la dinámica de la salida ante
cambios en la perturbación Ti no es mas rápida que ante cambios en la variable manipulada
U. La función de transferencia del compensador vendrá dada por:
0.0125
− D( s) 1.06s + 1
G F (s ) =
=
= −0.008
1.5
G( s)
1.06s + 1
y corresponderia al siguiente esquema:
T
Ti
Proceso
TT
TT
F
U
TC
TY
Ti
0.0125
1.06s + 1
-0.008
W
E
1
0.1(1 +
)
( 20 / 60)s
U
T
1 .5
1.06s + 1
Examen de la Asignatura "Control e Instrumentación de Procesos Químicos"
4º curso de Ingeniería Química
Problema 7
En un proceso de secado se introduce al secadero un cierto flujo constante de material, junto
con una corriente de un gas caliente, cuyo caudal puede manipularse por medio de la señal a
un sistema ventilador. En un experimento consistente en disminuir la señal al ventilador un 10%
desde una posición de equilibrio, se ha observado un cambio en la humedad del material
como el de la figura. El transmisor está calibrado con un span de 5 unidades. Unidades de
tiempo en minutos.
Se pide:
1) Para controlar la humedad se usa un controlador tipo P. Dibujar un diagrama de bloques
del sistema de control resultante, especificando las funciones de transferencia.
2) Calcular el valor de la ganancia del regulador en %/%, para obtener un sobrepico del 20%
en la respuesta en lazo cerrado a un salto de dos unidades en la consigna.
3) Calcular el valor de la ganancia del regulador para obtener un error estacionario inferior al
1 % en la respuesta en lazo cerrado a un salto del 2% en la consigna. ¿Cual será el valor
estacionario de la variable manipulada en este caso?
4) Si la referencia oscila senoidalmente con una amplitud del 10% y un periodo de 0.1 min. Y
se utiliza el valor de la ganancia del apartado 4) ¿Cómo será la salida del sistema al cabo de
un tiempo bastante largo?
5) Calcular y explicar el diagrama del lugar de las raices del sistema.
Solución
1) Dado que la única información es la respuesta a un ensayo en salto, utilizaremos dicha
gráfica para deducir un modelo lineal aproximado. De la forma de la respuesta, con sobrepico
y oscilación y sin retardo, se deduce que podemos escoger un modelo de segundo orden del
tipo:
Kω 2n
s 2 + 2δωn + ω2n
0.83
0.1
1.1
La ganancia K se calcula mediante el cociente entre el cambio en humedad en estado
estacionario, 0.83, y el cambio en la apertura de la válvula -10%. Como se piden unidades en
%/%, debemos convertir el cambio de humedad a escala de % teniendo en cuenta que 5
unidades son el 100% del transmisor.
K = (0.83 100 / 5) / (-10) = -1.66 % / %
Para calcular el valor del amortiguamiento δ usaremos la medida del sobrepico. El valor del
sobrepico es de 0.1 unidades y en % sobre el valor final: 0.1 100 /0.83 = 12 % y se sabe
que la relación de este valor con el amortiguamiento viene dada por:
− δπ
100e
por tanto:
1− δ 2
−δπ
e
= 0.12; ln( 0.12) =
1− δ 2
− δπ
1 − δ2
; (−2.12) =
2
δ2π2
1 − δ2
14.36δ = 4.495; δ = 0.56
2
Un valor similar de δ puede obtenerse de las gráficas %sobrepico / δ
Para calcular la frecuencia propia no amortiguada ωn, usaremos el tiempo de pico. El tiempo
de pico es de 1.1 min y se sabe que viene relacionado con los parámetros de la función de
transferencia por:
π
tp =
ωn 1 − δ2
por tanto:
π
1.1 =
; ω n = 3.44
ωn 1 − 0.56 2
y la función de transferencia resultante entre los cambios de temperatura y de posición de la
valvula resulta ser en % / %:
− 19.64
s + 3.86s + 11.8
2
y el diagrama de bloques en lazo cerrado es:
W
E
U
Kp
− 19.64
2
s + 3.86s + 11.8
Y
2) La función de transferencia en lazo cerrado resulta ser:
− 19.64 K p
Y( s) =
G(s ) R( s)
W (s ) =
1 + G( s) R (s)
− 19.64K p
s + 3.86s + 11.8 W( s) =
W (s )
− 19.64 K p
s 2 + 3.86s + 11.8 − 19.64K p
1+ 2
s + 3.86s + 11.8
2
Para obtener un sobrepico del 20% a un salto, independientemente del valor del mismo, el
amortiguamiento en lazo cerrado debe ser
− δ cπ
20 = 100e
1−δ c
2
⇒ δ c = 0.45
3.86 = 2δ c w cn = 2 0.45 11.8 − 19.64K p ⇒ K p = −0.34
o sea:
3) La expresión del error en lazo cerrado es:
E (s) =
1
W( s) =
1 + G (s) R (s )
1+
1
− 19.64K p
W (s) =
s 2 + 3.86s + 11.8
20
2
s + 3.86s + 11.8 − 19.64K p s
s 2 + 3.86s + 11.8
s 2 + 3.86s + 11.8
20
11.8 20
e ss = lim s 2
=
= 1 ⇒ K p = −11.41
s → 0 s + 3.86s + 11.8 − 19.64 K
11.8 − 19.64K p
p s
Dado que la función de transferencia entre U y W es:
U(s) = R (s)( W( s) − Y(s)) = R (s )( W (s) − G(s ) U(s))
R (s )
U(s) =
W( s) =
1 + G (s) R (s )
1+
Kp
− 19.64 K p
W (s) =
K p (s 2 + 3.86s + 11.8)
s 2 + 3.86s + 11.8 − 19.64K p
W (s)
s 2 + 3.86s + 11.8
K p (s 2 + 3.86s + 11.8)
20K p 11.8
20
u ss = lim sU (s) = lim s 2
=
= −11.41
s→ 0
s → 0 s + 3.86s + 11.8 − 19.64K
11.8 − 19.64 K p
p s
o sea, un 11.41 % por debajo de su valor de equilibrio.
4) La respuesta del sistema en lazo cerrado a cambios seniodales en la referencia será también
senoidal del mismo periodo 0.1 min, pero con una amplitud y desfase que vendran dados en
función de la magnitud y fase la función de transferencia en lazo cerrado a la frecuencia 2π/0.1
= 20π. Para calcularlas sustituiremos s por j20π en la misma, daremos a Kp el valor –11.41,
y calcularemos el módulo y argumento del complejo resultante:
G ( j ω) R ( j ω)
1 + G ( j ω) R ( j ω)
=
s =20 πj
− 19.64K p
s 2 + 3.86s + 11.8 − 19.64K p
=
s = 20 πj
− 19.64( −11.41)
224.2
=
( j20) + 3.86 j20 + 11.8 − 19.64( −11.41) − 164 + 77.2 j
2
224.2
224.2
=
= 1.14;
− 164 + 77.2 j
164 2 + 77.2 2
arg(
224.2
) = −154.8º
− 164 + 77.2 j
La amplitud de la oscilación será 1.14 . 10% = 11.4%
estará retrasada 154.8º = 0.1 154.8/360 = 0.043 minutos respecto a la referencia.
y
5) El diagrama del lugar de las raices corresponde a las posiciones en el plano s de las raices
de la ecuación característica del sistema en lazo cerrado para distintos valores de la ganancia
Kp, o sea las raices de:
s 2 + 3.86s + 11.8 − 19.64K p = 0
s=
− 3.86 ± 3.86 2 − 4(11.8 − 19.64K p )
Para Kp= 0 resulta:
2
s=
=
− 3.86 ± − 32.3 + 78.56K p
2
− 3.86 ± 5.68 j
2
Como el proceso tiene ganancia negativa, el controlador debe tenerla también. Si no fuera así,
cuando aumentara la humedad disminuiria la corriente de gas caliente, operando al reves de lo
que se espera para corregir las desviaciones. Cuando Kp tome valores negativos cada vez
mayores, el radicando será negativo, por lo que tendremos la misma parte real negativa 3.86/2 y una parte imaginaria que ira siendo cada vez mayor. El diagrama resultante es:
x
x
Lo que significa que para cualquier valor negativo de la ganancia la respuesta será de tipo
subamortiguado, puesto que las raices son complejas conjugadas. Además el tiempo de
asentamiento será similar, al tener todas la misma parte real. Al incrementarse negativamente la
ganancia también lo hace la parte imaginaria, de modo que la frecuencia de las oscilaciones
será cada vez mayor, al igual que el sobrepico.
Problema 8
Se sabe que las funciones de transferencia que relacionan las dos entradas y dos salidas de un
proceso son:
G 11 =
2
s+1
G 12 =
2
s + 3s + 1
2
G 21 =
s−1
s + 4s + 2
2
G 22 =
u1
y1
u2
y2
2
3s + 1
Se desea conocer:
1) Para instalar dos controladores SISO, ¿cual será el mejor apareamiento de entradas y
salidas?
2) ¿Seria aconsejable esa forma de regulación?
3) Suponiendo que se colocan reguladores proporcionales de ganancia unidad, ¿cual será la
función de transferencia que relaciona la salida 1 con las consignas de ambos reguladores?
Solución
1) La medida de la interacción y la mejor forma de aparear entradas y salidas puede
estudiarse con la matriz de ganancias relativas de Bristol. Para ello debe encontrarse
previamente la matriz de ganancias.
Las ganancias entre las entradas y salidas pueden obtenerse a partir de las funciones de
transferencia:
k 11 =
k 21 =
de modo que:
lim s
s →0
lim s
s →0
2 1
s +1s = 2;
1
s −1 1
s + 4s + 2 s = −0.5
1
2
2
2
K=
− 0.5 2
k 12 =
lim s
s →0
2
1
s + 3s + 1 s = 2 ;
1
2
k 22 =
lim s
s →0
2 1
3s + 1 s = 2
1
Para calcular la RGA, calcularemos uno de sus elementos, por ejemplo λ11 y luego estimar los
otros usando las propiedades de la RGA:
λ 11 =
k 11k 22
2 2
=
= 0 .8
k 11k 22 − k 12k 21 2 2 − 2( −0.5)
λ 21 = 1 − λ 11 = 0.2;
λ 12 = 1 − λ11 = 0.2;
λ 22 = 1 − λ 21 = 0.8;
0.8 0.2
RGA =
0.2 0.8
luego:
Ahora, claramente la mejor forma de asociar entradas y salidas es controlar la salida 1 con la
entrada 1 y la salida 2 regularla con la entrada 2, puesto que el termino correspondiente de la
RGA (0.8) es mas próximo a 1, con lo que la interacción entre los lazos resultantes será
menor. La otra asociación, salida 1 regulada con la entrada 2 y salida 2 regulada con la
entrada 1, tiene un valor de 0.2 en la RGA, lo cual quiere deciur que, como 0.2 = 2/10, hay
un cambio de gananciua del 500% en un lazo de esa asociación cuando el otro conmute de
manual a automático y viceversa, lo cual no es admisible.
u1
y1
R1
Proceso
R2
u2
y2
2) En este caso, el cambio en ganancia en un lazo cuando el otro conmuta entre automático y
manual es, teniendo en cuenta que 0.8 =8/10 , de la misma proporción que pasar de 8 a 10,
que es un cambio admisible y probablemente no seria necesario un controlador multivariable.
3) Para calcular esta función de transferencia, partiremos del diagrama de bloques:
y1
G11
w1
u1
R1
G21
R2
w2
u2
G12
G22
y2
Y operando:
y1 = G11u 1 + G12 u 2 =
= G11R 1 ( w 1 − y 1 ) + G 12R 2 ( w 2 − y 2 )
y 2 = G 21u 1 + G 22 u 2 =
= G 21R 1 ( w 1 − y 1 ) + G 22R 2 ( w 2 − y 2 )
G11R1
G12R 2
w1 +
( w 2 − y2 )
1 + G11R1
1 + G11R1
G21R1
G 22R 2
y2 =
( w1 − y1) +
w
1 + G 22R 2
1 + G22R 2 2
y1 =
y1 =
G11R 1
G 12R 2
G 21R1
G 22R 2
w1 +
(w 2 −
( w 1 − y1 ) −
w2)
1 + G11R1
1 + G 11R1
1 + G 22R 2
1 + G 22R 2
y1 =
G 11R1(1 + G 22R 2 ) − G 12R 2G 21R1
G12R 2 (1 + G 22R 2 ) − G 12R 2G 22R 2
w1 +
w2
(1 + G 11R1)(1 + G 22R 2 ) − G 12R 2G 21R1
(1 + G 11R1)(1 + G 22R 2 ) − G 12R 2G 21R1
Ahora, sustituyendo R1 y R2 por Kp1 y Kp2 , así como dando valores a las funciones de
transferencia G:
G 11 =
2
s+1
G 12 =
2
s + 3s + 1
2
obtendremos la función de transferencia pedida.
G 21 =
s−1
s + 4s + 2
2
G 22 =
2
3s + 1
Problemas de “Control e Instrumentación de procesos químicos”
4º Ingeniería Química
Problema 9
La presión de un sistema de almacenamiento de un cierto gas se regula por medio de un
sistema como el reflejado en la figura manipulando la linea de salida.
PT
PC
gas
El sistema opera normalmente a una presión de 3 bar en el depósito de almacenamiento y con
una señal a valvula del 30%. Se sabe que el sistema, en lazo abierto, ante un cambio en la
señal a la válvula desde el 30 % al 35% da una respuesta temporal en la presión como la de la
figura, donde el tiempo aparece en sg., y la presión en bar, estando calibrado el transmisor
en el rango 1-5 bar.
Se pide:
1) Diseñar un regulador que no presente error estacionario frente a cambios en salto en la
referencia, y que minimice la desviación en el tiempo sobre la misma al corregir posibles
perturbaciones.
2) Calcular el error estacionario que se obtendria con el regulador diseñado si la referencia de
presión varia segun la ecuación 3+0.4 t.
3) Si el regulador se coloca en posición manual y se dan cambios sinusoidales de amplitud 2%
y periodo pi/2 sg, a la señal del mando manual en torno al valor 30%, ¿Cual sería la evolución
temporal de la presión cuando se alcance una situación estacionaria?
4) Se sabe que la relación entre la temperatura del producto que llega al dispositivo de
almacenamiento en ºC y la presión en el mismo en bars, para una apertura de válvula del 30%,
viene dada por :
dp
1800
= (−3p 2 + 30)T ( t − 0.4) − 30
dt
¿Como modificariamos el esquema de control anterior para eliminar el efecto de los posibles
cambios de temperatura del producto que llega sobre la presión? Calcula los parámetros del
nuevo esquema de control para que se cumplan las especificaciones de 1) y 4).
Solución
El sistema, por la forma de la respuesta, se ve que no posee integradores en lazo abierto, de
modo que un regulador que no presente error estacionario frente a cambios en la referencia
deberá ser de tipo PI o PID. Por otra parte, el criterio de diseño del enunciado es minimizar
la integral del módulo del error (MIAE) ante perturbaciones. Este es el criterio utilizado en las
tablas de sintonía de Lopez et al. que se aplica a procesos de respuesta sobreamortiguada en
lazo abierto, como el del problema, según se aprecia en la figura. El método de las tablas de
Lopez se basa en el conocimiento de un modelo de primer orden con retardo del proceso del
tipo:
Ke −ds
τs + 1
Donde K es la ganancia, d el retardo y τ la constante de tiempo. La respuesta de nuestro
proceso no es de este tipo, pero puede aproximarse por un modelo de esta clase.
La ganancia se calcula del modo habitual, mediante el cociente entre el cambio en la salida en
estado estacionario y el cambio en la entrada. Para determinar la constante de tiempo y el
retardo podemos seguir varios métodos, el mas común se basa en dibujar la recta tangente a
la curva de respuesta de mayor pendiente, determinando luego los puntos de corte de la
misma con paralelas en los puntos de inicio y final . El resultado puede verse en la figura:
0.3
1.9
2.8125
Por tanto:
K=
2.8125 − 3
bar
100 %
%
= −0.0375
= −0.0375
= −0.94
35 − 30
%
5 −1 %
%
d = 0.3 sg. τ = 1.9 – 0.3 = 1.6 sg. y el modelo estimado es:
− 0.94e −0.3s
1.6s + 1
Otro procedimiento es calcular los instantes de tiempo en los que se alcanzan el 28.3% y el
63.2 % del valor final y aplicar las fórmulas de estimación correspondientes:
0.75
2.9469=
28.3%
2.8815=
63.2%
2.8125
1.4
En este caso t2 = 1.4 sg, t1 = 0.75 sg. de modo que:
τ = 1.5(t2 –t1) = 0.975 sg; d = t2 - τ = 0.425 sg. y el modelo obtenido con esta aproximación
es:
− 0.94e −0.42s
0.98s + 1
Ambos son válidos, teniendo en cuenta que son aproximaciones del tipo primer orden con
retardo de un sistema sobreamortiguado de orden superior.
Ahora podemos aplicar las tablas de Lopez para reguladores PI paralelos. En primer lugar
comprobamos que son aplicables al cumplirse d / τ = 0.3 / 1.6 < 1 (e igual para el otro
modelo). Ahora para calcular la ganancia Kp del regulador usaremos la fórmula:
d
K p K = a
τ
b
Para la cual las tablas de Lopez, siguiendo el criterio MIAE nos proporcionan los valores:
Criterio
Proporcional
Integral
MIAE
a=0.984
a=0.608
b=-
b=-
a=1.305
a=0.492
b=-
b=-
a=0.859
a=0.674
b=-
b=-
MISE
MITAE
a = 0.984, b= - 0.986, con lo cual:
1
0 .3
Kp =
0.984
− 0.94
1 .6
−0 .986
mientras que para el tiempo integral Ti se utiliza la fórmula:
τ
d
= a
Ti
τ
b
= −5.45 % / %
para la cual la tabla de Lopez da los valores: a = 0.608, b = - 0.707 , lo que conduce a:
1
1
0 .3
=
0.608
Ti 1.6
1 .6
−0. 707
⇒ Ti = 0.8sg.
Del mismo modo podria haberse usado el otro modelo, lo cual hubiera conducido a:
2.41; Ti = 0.89
Kp = -
2) Si la referencia de presión varia según 3 + 0.4 t, como el punto de equilibrio es 3 bares, el
cambio en la referencia es 3 + 0.4t – 3 = 0.4t bares = 0.4 t 100/(5-1) = 10 t en % . La
expresión del error es:
10
=
K p ( Tis + 1) s 2
− 0.94e
1+
1.6s + 1
Tis
(1.6s + 1) 0.8s
10
− 0. 3s
(1.6s + 1)0.8s − 0.94e
(−5.45)( 0.8s + 1) s 2
(1.6s + 1) 0.8s
10
0.8 10
e ss = lim s
=
= 1.56%
s → 0 (1.6s + 1)0.8s − 0.94e −0 .3 s ( −5.45)( 0.8s + 1) s 2
− 0.94( −5.45)
E (s) =
1
W( s) =
1 + G (s) R (s )
1
−0 .3 s
3) Si se dan cambios sinusiodales en lazo abierto en torno al 30% de la señal a la válvula, la
presión oscilará sinusoidalmente en torno al punto de equilibrio de 3 bares, al cabo de un
cierto tiempo con una frecuencia igual a la de la señal de mando 2pi/(pi/2) = 4 rad/sg. y con
una amplitud y desfase que dependen del módulo y argumento de la función de transferencia a
esa frecuencia:
G( jω) =
− 0.94e −0. 3 jω
;
1.6( j ω) + 1
G ( jω) =
− 0.94e −0.3 jω
;
1.6( j ω) + 1
G( j4) =
0.94
1.6 2 4 2 + 12
= 0.145
arg( G( j ω)) = − π + arg( e − 0.3 jω ) − arg(1.6( j ω) + 1);
1.6 4
arg( G( j4)) = − π − 0.3 4 − arctg
= −5.75rad
1
o sea oscilara con una amplitud de 2. 0.145 = 0.29% una frecuencia de 4 rad/sg y un desfase
respecto a la señal de mando de –5.57 rad = 1.44 sg.
4) Puesto que la temperatura del producto de entrada actua como una perturbación medible,
podemos mejorar el sistema de control incorporando una compensación en adelanto
(feedforward). Para ello necesitamos la función de transferencia entre la presión y la
temperatura de entrada en el punto de trabajo, la cual podemos obtenerla de la ecuación del
enunciado:
dp
= (−3p 2 + 30)T ( t − 0.4) − 30
dt
En el punto de operación considerado, p0 = 3 bars, de modo que en estado estacionario
podemos escribir: (-3p02 + 30)T0 = 30, de donde T0 = 10 ºC. Conocido el punto de
operación, podemos linealizar la ecuación anterior en torno a:
dp
T0 = 10ªC, p0 = 3 bar, p& 0 = 0 donde hemos usado la notación p& =
dt
La ecuación del modelo es función de T, p y su derivada p& , y puede linealizarse usando una
expansión de Taylor. En lo que sigue, para simplificar la notación, utilizaremos la abreviatura
T = T(t-0.4).
1800
1800
dp
+ (3p 2 − 30)T + 30 = 0
dt
f (p& , p, T) = 0
la linealizac ión es una expresión del tipo :
∂f
∂f
∂f
∆p& +
∆p +
∆T = 0
∂p& 0
∂p 0
∂T 0
donde ∆p& = p& - p& 0 ; ∆T = T - T0 ; ∆p = p - p 0 ; con lo que :
1800∆p& + 6p 0T0 ∆p + ( 3p 20 − 30) ∆T = 0
d ∆p
1800
+ 180∆p = 3∆T ( t − 0.4)
dt
Tomando ahora transformadas de Laplace a ambos lados de esta ecuación linealizada, y
teniendo en cuenta que, si en el instante inicial el proceso está en equilibrio, los valores iniciales
de los incrementos serán nulos:
d ∆p
1800L
+ 180L{∆p} = 3L{∆T( t − 0.4)}
dt
1800sP (s ) + 180P(s ) = 3e −0.4s T( s) donde T(s) = L{∆T( t )}, P(s ) = L{∆P},
(1800s + 180) P(s ) = 3e −0.4s T(s )
y la función de transferencia resulta ser:
P (s) =
3e −0.4s
0.01661e −0.4s
0.416e −0.4s
T (s) =
T( s) bar =
T(s )%
1800s + 180
10s + 1
10s + 1
Dado que la dinámica de la salida ante cambios en la perturbación T no es mas rápida (mayor
constante de tiempo 10 frente a 1.6 y mayor retardo, 0.4 frente a 0.3) que ante cambios en la
variable manipulada U, podrá utilizarse un compensador en adelanto para eliminar la
perturbación:
La función de transferencia del compensador vendrá dada por:
− 0.416e −0. 4s
− D( s)
0.44e −0.4s (1.6s + 1)
10s + 1
G F (s ) =
=
=
G ( s)
− 0.94e −0.3s
10s + 1
1 .6 s + 1
y corresponderia al siguiente esquema:
T
0.416e −0.4s
10s + 1
0.44e −0. 1s (1.6s + 1)
10s + 1
W
E
1
− 5.45(1 +
)
0.8s
U
− 0.94e −0.3s
1.6s + 1
Como el compensador en adelanto no altera la dinámica del lazo de control, no seria
necesario modificar la sintonia del regulador para mantener las especificaciones de 1)
El esquema de proceso sería:
TY
TT
gas
PT
PC
P
Problema 10
Un reactor tubular como el de la figura realiza la conversión de unos reactivos R que se
mezclan previamente con otros S y se introducen por su parte inferior tras pasar por un
precalentador para producir un producto A. Los reactivos poseen una concentración
constante. El flujo de reactivos R viene impuesto por otras partes del proceso. El reactor no
dispone de variables manipulables, si bien se puede actuar significativamente sobre la
concentración del producto A por medio la temperatura de entrada mediante el precalentador.
Este utiliza como fluido calefactor vapor de agua que parcialmente calienta a los reactivos y
despues se utiliza para otros fines con una demanda variable. Se desea diseñar un esquema de
control que permita mantener la concentración de A tan exactamente como sea posible.
Justificar el esquema propuesto.
A
reactor
S
R
vapor
Solución
Los puntos qiue hay que considerar en el diseño del sistema de control son los siguientes:
Sobre la concentración de A influye la adecuada proporción entre los flujo de R y S. Para ello
ha de instalarse un control ratio entre ambas magnitudes. Como el flujo de R viene impuesto,
la única alternativa es medirlo y actuar con un ratio sobre la consigna de un lazo de control de
flujo de S. Nótese que la concentración de R y S es constante según el enunciado. Nótese
también que, de esta forma, el flujo total que llega al reactor esta prefijado por R y el control
ratio.
Para regular la concentración de producto A la única variable manipulada es la temperatura de
salida del precalentador. A su vez, para poder fijar esa temperatura necesitamos un sistema
de control de temperatura de la salida del precalentador. Por tanto el esquema de control
incluirá un lazo de regulación de la concentración de A, en cascada con un lazo de regulación
de la temperatura del precalentador. La concentración de A se puede medir con un analizador
en linea.
Para la regulación de temperatura la única opción que queda, sin alterar la estrucrtura física, es
actuar sobre el vapor por medio de una válvula, ahora bién, teniendo en cuenta que se quiere
mantener con precisión la concentración de A, también deberá poderse actuar con precisión
sobre la temperatura y como el vapor está sujeto a demandas variables, será conveniente no
actuar directamente sobre la válvula de admisión de vapor, sino en cascada sobre un lazo
interno de regulación de presión de vapor en el precalentador que absorva los cambios de
demanda.
Finalmente, y por la misma razón demantener con precisión la concentración de A, debemos
tener en cuenta que los cambios de R, traducidos a cambios de flujo total por el control ratio,
modificarán la concentración de A al variar el tiempo de residencia en el reactor. Por ello,
para compensar esta perturbación, se colocará un compensador feedforward que midiendo el
caudal R actue sobre la consigna de temperatura para adelantarse a los efectos del cambio de
flujo sobre la concentración. Del mismo modo el cambio de flujo afectará a la temperatura del
precalentador, por ello, para asegurar que se siguen las ordenes en temperatura
adecuadamente, se colocará otro compensador feedforward midiendo el caudal R y actuando
sobre la consigna de presión para compensar el efecto de cambio de flujo sobre la
temperatura. El esquema final puede verse en la figura:
A
AT
reactor
S
AC
FT
FC
R
PT
TT
PC
TC
vapor
FF
FT
FY
FY
Problemas de “Control e Instrumentación de Procesos Químicos”
4º curso de Ingeniería Química
Problema 23
En la Fig. 1 se pude ver un proceso al que entra una corriente manipulable A y otra corriente
no manipulable B. La corriente A puede regularse por medio de un sistema de control de flujo
tal como se aprecia en la figura. Cuando se aumenta en 2 l/min la consigna z del regulador de
flujo de A, partiendo de un cierto estado estacionario de todo el sistema, la respuesta que se
obtiene en la densidad ρ del producto de salida puede verse en la Fig. 2. En esta figura, las
unidades del eje de tiempos son minutos y las de densidad Kg/l y esta última se mide con un
transmisor calibrado en el rango 0.5-3 kg/l para dar una señal de 4-20 mA. Del mismo modo
el transmisor de flujo de A está calibrado en el rango 0- 20 l/min.
z
FT
FC
ρ
proceso
A
B
Fig. 1
Se pide:
1) Estimar un modelo matemático dinámico que relacione los cambios de consigna de caudal
de producto A con los cambios en la densidad de salida del producto en esa zona de
trabajo.
2) Proponer un sistema de control de densidad y dibujar un esquema del mismo utilizando
nomenclatura ISA. Diseñar el regulador de densidad mas sencillo que no presente error
estacionario frente a cambios escalón en la referencia y que minimize las desviaciones de
la densidad sobre el valor de referencia cuando B experimenta cambios.
3) Dibujar un diagrama de bloques del proceso en lazo cerrado y expresar las relaciones que
ligan los cambios en densidad con los cambios de referencia de densidad y de B, sí como
las unidades de las distintas variables.
4) En lazo abierto, cuando el caudal B experimenta un salto en escalon, la densidad varia de
forma continua sin estabilizarse, y cuando B experimenta un impulso unitario positivo
(l/min) la densidad se estabiliza, al cabo de un cierto tiempo, en un nuevo valor 2 Kg/l por
debajo del valor estacionario de partida. Sabiendo esto, se pide calcular el error
estacionario, si existe, que presentará el sistema en lazo cerrado con el regulador
calculado en 2), frente a un cambio unitario (l/min) en escalón del caudal B.
5) ¿Cuál es el margen de fase del sistema en lazo cerrado calculado en 2)?, ¿Qué
interpretación puedes dar a este valor?
1.45
T
Fig.2
1.4
1.35
1.3
1.25
1.2
1.15
1.1
1.05
1
0
0.5
1
Fig.2 1.5
Time (min)
2
2.5
3
Fig.2
Solución
1) A la vista del enunciado del problema, debemos obtener el modelo matemático pedido a
partir de la curva de respuesta de la Fig.2. Dado que se trata de un proceso
sobreamortiguado, podemos intentar aproximar la respuesta por la de un sistema de primer
orden con retardo:
Ke −ds
τs + 1
Para estimar este modelo, la ganancia se calcula del modo habitual, mediante el cociente entre
el cambio en la salida en estado estacionario y el cambio en la entrada.
Con referencia a la Fig. 3 se tiene:
K=
1.417 − 1
Kg
= 0.21
2
min
o bien expresado en %/%:
K=
100
3 − 0.5 = 18.8 = 1.88 %
100
10
%
2
20 − 0
(1.417 − 1)
Para determinar la constante de tiempo y el retardo podemos seguir varios métodos, el mas
común se basa en dibujar la recta tangente a la curva de respuesta de mayor pendiente,
determinando luego los puntos de corte de la misma con paralelas en los puntos de inicio y
final . El resultado puede verse en la figura:
1.374
1.45
1.417
1.4
1.35
1.3
1.25
1.2
1.15
1.1
1.05
1
0
0.5
1
1.5
2
Time (min)
0.22
Fig.3
De donde se deduce:
d = 0.22 sg. τ = 1.374 – 0.22 = 1.15 sg. y el modelo estimado es:
ρ(s ) =
1.88e −0.22s
z( s)
1.15s + 1
2.5
3
2) Un esquema de un sistema de control de densidad puede verse en la Fig.4. Incorpora un
transmisor de densidad y un regulkador que actua en cascada sobre la referencia de caudal de
A.
w
DC
z
FT
FC
DT
ρ
proceso
A
B
Fig.4
Dado que el proceso no presenta integradores en su respuesta frente a z, el regulador mas
sencillo que puede eliminar errores estacionarios frente a cambios de consigna es un PI. De
acuerdo a las especificaciones pedidas, podemos utilizar las Tablas de Lopez et al. con el
criterio MIAE para la sintonía, ya que corresponden al tipo de modelo identificado, verifican
la condición d/τ = 022/1.15 < 1, y se ajustan al criterio pedido.
Ahora para calcular la ganancia Kp del regulador usaremos la fórmula:
d
K p K = a
τ
b
Para la cual las tablas de Lopez, siguiendo el criterio MIAE nos proporcionan los valores:
Criterio
Proporcional
Integral
MIAE
a=0.984
a=0.608
b=-
b=-
a=1.305
a=0.492
b=-
b=-
a=0.859
a=0.674
b=-
b=-
MISE
MITAE
a = 0.984, b= - 0.986, con lo cual:
Kp =
1
0.22
0 .984
1.88
1.15
−0 .986
= 2.67 % / %
mientras que para el tiempo integral Ti se utiliza la fórmula:
τ
d
= a
Ti
τ
b
para la cual la tabla de Lopez da los valores: a = 0.608, b = - 0.707 , lo que conduce a:
1
1
0.22
=
0.608
Ti 1.15
1 .15
−0 .707
⇒ Ti = 0.59sg.
3) Un diagrama de bloques del proceso puede observarse en la figura:
B
D(s)
%
W%
E%
z%
2.67 (1 +
1
)
0.59s
−0. 22s
ρ%
1.88e
1.5s + 1
La salida del bloque D, desconocido, debe estar en %, mientras que la entrada puede figurar
en l/min puesto que no sabemos nada del transmisor respectivo. Del diagrama se deduce la
expresión de las funciones de transferencia que relacionan la densidad con la referencia y el
caudal B:
1.88e −0.22s
0.59s + 1
2.67
GR
D
D
0.59s
ρ(s) =
w+
B = 1.15s +− 01.22s
w+
B=
−0 .22 s
1 + GR
1 + GR
1.88e
0.59s + 1
1.88e
0.59s + 1
1+
2.67
1+
2.67
1.15s + 1
0.59s
1.15s + 1
0.59s
−0 .22 s
1.88e
2.67( 0.59s + 1)
0.64s (1.5s + 1) D
=
w+
B
− 0.22 s
(1.15s + 1)0.59s + 1.88e
2.67 (0.59s + 1)
(1.15s + 1)0.59s + 1.88e − 0. 22s 2.67(0.59s + 1)
4) La expresión del error en lazo cerrado ante un cambio en B viene dada por:
E (s ) = −
D
B=−
1 + GR
D (s )
1+
−0 .22s
1.88e
0 .59s + 1
2 .67
1 .15 s + 1
0 .59 s
B=
− 0.59s (1 .15 s + 1) D(s)
B
(1 .15s + 1)0.59 s + 1.88 e −0.22s 2 .67 (0.59s + 1)
y el error estacionario frente a un cambio escalón en B puede calcularse como:
e ss = l im sE (s) = l im s
s→0
s→0
− 0 .59s(1 .15 s + 1) D(s )
1
− 0.59 sD(s)
= l im
− 0.22s
s
→
0
1 .88 2 .67
(1 .15 s + 1) 0.59s + 1.88 e
2 .67 ( 0.59s + 1) s
Para calcular este límite, según el enunciado, se sabe que D(s) contiene un integrador puesto
que responde variando monótonamente sin estabilizarse ante un cambio escalón en B, y
además, solo tiene un integrador puesto que ante un impulso alcanza un valor estacionario.
Esto hará que se cancele la s de la expresión anterior. En realidad, la única información
necesaria para resolver el problema es la relativa al valor estacionario de la la respuesta a un
impulso en B en lazo abierto. Este viene dado por:
l im sD(s)1 = −2 Kg / l = −2
s→0
100
= −80 %
3 − 0 .5
de modo que el error anterior alcanza el valor:
e ss = l im sE(s) = l im
s→0
s→ 0
− 0.59 sD(s) ( −0.59 )(−80 )
=
= 9.4 %
1.88 2.67
1.88 2.67
5) Para cálcular el margen de fase del sistema hay que evaluar el valor de la expresión MF =
π + arg(G(jω)R(jω)) en un valor de la frecuencia para el cual | G(jω)R(jω)|=1.
Para estimar dicha frecuencia debemos, por tanto, resolver primero la ecuación:
1 .88 e −0.22 j ω
0 .59 jω + 1
2.67
= 1;
1 .15 jω + 1
0 .59 jω
1 .88
1.15 2 ω 2 + 1
2.67
0 .59 2 ω 2 + 1
=1
0 .59 ω
72 .4
0 .59 2 ω 2 + 1
= 1;
1.15 2 ω 2 + 1
ω2
72.4 (0.59 2 ω 2 + 1) = (1 .15 2 ω 2 + 1)ω 2 ;
1.15 2 ω 4 − 24 .2 ω 2 − 72 .4 = 0;
ω2 =
24 .2 ± 24 .2 2 + 4 1.15 2 72 .4
2 1 .15
2
=
24 .2 ± 31 .12
= 20 .9
2 1.15 2
ω = 4 .57 rad / min
Ahora podemos calcular el MF:
1.88e −0. 22jω
0.59 jω + 1
π
MF = π + arg
2.67
= π + − 0.22ω + arctan 0.59ω − arctan 1.15ω − =
0.59 j ω
2
1.15 jω + 1
π
π
− 0.22(4.57 ) + arctan 0.59( 4.57 ) − arctan 1.15( 4.57) = − 1 + 1.21 − 1.38 = 0.4 rad =
2
2
= 23º
=
Basándonos en la relación entre margen de fase y amortiguamiento en sistemas de segundo
orden, el pequeño margen de fase encontrado nos permite predecir que la respuesta del
sistema tendra un sobrepico alto y el grado de robustez será pequeño frente a cambios en el
proceso que aumenten el desfase del sistema, como retardos y constantes de tiempo,
existiendo peligro de desestabilización si estos aumentan por algún motivo.
Problema 24
En el diagrama de la figura se puede ver un proceso en el que una corriente A, no manipulable
y que experimenta cambios significativos, intercambia calor con otro líquido C a alta
temperatura tras pasar por el depósito 1. En el punto de suministro del líquido C, la
temperatura es sensiblemente constante, pero la presión sufre variaciones de alguna
importancia. La corriente A, tras atravesar el intercambiador, va al depósito 2, donde una
parte es reciclada al depósito 1 por medio de un sistema de bombeo que impone un caudal
constante y otra parte, B, es la salida del proceso. Se desea mantener el caudal y temperatura
de B tan constantes como sea posible, así como garantizar la seguridad del proceso. Existe un
sistema de rebose en el depósito 2 que hace que no sea problemático un desbordamiento en
dicho depósito.
Se pide:
Elegir la instrumentación y los lazos de control adecuados para ello y dibujar el
correspondiente esquema de control según las normas ISA, justificando el mismo.
A
1
D
C
2
B
Solución
Los objetivos de regulación son mantener el caudal y temperatura de B. Además, por motivos
de seguridad, deben regularse los niveles en ambos depósitos y garantizarse la circulación de
1 a 2 a través del cambiador.
El caudal de B puede mantenerse mediante un controlador de flujo y un transmisor de flujo.
Para actuar sobre la temperatura de B, lo mas sencillo, y que no interfiere en los otros
circuitos, es variar el caudal de C. No obstante, como la presión de alimentación de C
experimenta cambios significativos, lo lógico es utilizar una estrucura en cascada en que el
regulador de temperatura actue sobre la consigna de un regulador de caudal de C, de este
modo este último regulador absorve las perturbaciones de presión de alimentación que no se
transmitirán de forma significativa a la temperatura.
El nivel del depósito 1, puesto que la entrada A es no manipulable, debe regularse con la
salida D. Nótese que, aunque A fuese cero, la salida D no seria nula de forma estable debido
al caudal de recirculación y, por tanto, el intercambiador no quedaría vacio. Una consecuencia
secundaria de este lazo es que modifica la temperatura de salida, con lo cual si se quiere
mantener con precisión, debe incorporarse una corrección feedforward al caudal de C para
compensar estas perturbaciones.
El nivel del depósito 2 debe regularse también pero, al no quedar otras variables manipuladas,
no que da mas remedio que establecer un control overrride sobre el flujo de B. Nótese que
aquí lo importante es mantener el nivel por encima de un mínimo, ya que debe protegerse el
equipo de bombeo y los problemas de rbose no se contemplan como tales.
Para la medida de estas variables se usarán transmisores de temperatura, nivel y caudal
convencionales. El conjunto de la propuesta puede verse en la figura:
FT
FY
A
LC
1
FT
FC
LT
C
2
TT
B
FT
FC
LS
LT
LC
L min
TC