1-1
Volumen I
Capítulo I
1.1 INTRODUCCIÓN
En años recientes, los sistemas de control han asumido un papel cada vez más
importante en el desarrollo y avance de la civilización moderna y la tecnología.
Prácticamente, cada aspecto de las actividades de nuestra vida diaria está afectado por
algún tipo de sistema de control. Los sistemas de control se encuentran en todos los
sectores de la industria, tales como el control de calidad de los productos manufacturados,
líneas de ensamble automático, control de máquinas - herramientas, tecnología espacial y
sistemas de potencia, robótica y muchos otros.
Como los avances en la teoría y práctica del control automático brindan medios para
lograr el funcionamiento óptimo de sistemas dinámicos, mejorar la productividad, liberarse
de la monotonía de muchas operaciones manuales rutinarias y repetitivas, y otras ventajas,
la mayoría de los ingenieros y científicos deben poseer un buen conocimiento de este
campo.
1.2 USO DE LOS SISTEMAS DE CONTROL
Los sistemas de control tienen un amplio uso que va desde los simples controles que
hacen funcionar un tostador automático hasta los complicados sistemas de control
necesarios para exploraciones espaciales. Se usan por ejemplo en:
•
Sistemas domésticos: controles automáticos en los sistemas de calentamiento y aire
acondicionado.
•
Sistemas industriales: sistemas de control de calidad de productos manufacturados.
•
Sistemas aeroespaciales: determinación de órbitas y trayectorias, control remoto.
•
Investigaciones biomédicas:
dinámicas de organismos vivos.
instrumentación de organismos vivos,
conductas
1-2
Volumen I
•
Control de procesos:
plantas químicas que requieren control de ratas de flujo,
temperatura, presión, humedad, etc.
•
Sistemas económicos: dinámica de la economía regional,
inventario, control de
producción.
•
Comunicaciones: Control remoto, transmisión de información.
•
Computadores y sistemas de procesamiento de datos: Solución de problemas analíticos
complejos, control por computadores de sistemas complejos.
•
Sistemas de defensa: control de proyectiles, sistemas de rastreo por radar, estabilidad
aerodinámica.
•
Sistemas de potencia y propulsión: sistemas eléctricos de vapor, control de reactores
nucleares.
•
Psicología: dinámica del operador humano,
dinámicas de grupo,
procesos de
aprendizaje.
•
Estructuras: diseño de puentes, comportamiento dinámico de edificios, estructuras de
aeronaves.
•
Sistemas de transporte: control de tráfico aéreo, control de velocidad y estabilidad de
naves.
1.3 CONCEPTOS GENERALES
A continuación se presentan algunas definiciones que serán manejadas a lo largo del
texto:
Variable controlada
Es la cantidad o condición (flujo, composición, temperatura, nivel y/o presión)
que se mide y controla, bien sea tratando de mantenerla tan constante como sea posible, o
tratando de que siga una trayectoria de tiempo deseada.
Variable manipulada
Es la cantidad o condición (flujo de corriente entrando o saliendo del proceso)
modificada por el controlador, a fin de afectar la variable controlada.
Perturbación
Es una señal que tiende a afectar adversamente el valor de salida de un sistema. Si
la perturbación se genera dentro del sistema, se le denomina “interna”, mientras que una
1-3
Volumen I
perturbación “externa” se genera fuera del sistema y constituye una entrada, no somos
libres de manipularlas. El sistema de control debe ser capaz de mantener la planta bajo
control a pesar de los efectos de una perturbación.
Planta
Es la porción del sistema que va a ser controlada. Puede estar afectada por la
aplicación de señales llamadas “entradas” y produce señales de particular interés llamadas
“salidas”.
Proceso
Es una operación voluntaria o artificial progresivamente continua, que consiste en
una serie de acciones controladas o movimientos dirigidos sistemáticamente hacia
determinado resultado o fin.
Sistema
Es un arreglo de elementos conectados o relacionados entre sí de tal manera que
formen y/o actúen como una unidad entera.
Control
Es la medición del valor de la variable controlada del sistema, y la variación de la
variable manipulada para corregir o limitar la desviación del valor medido, respecto al valor
deseado.
Sistema de control
Es la interacción de componentes dispuestos en una secuencia tal que el conjunto
produzca una respuesta deseada regulándose a él mismo o a otro sistema, tal como se
muestra en la Figura 1.1.
Estímulo E
(Entrada)
Sistemas de Control
Variable Controlada C
(Salida)
Figura Nº 1.1: Esquema de un sistema de control
Su objetivo principal es el de controlar la variable de salida de una manera
recomendada por la señal actuadora o estímulo a través de los elementos de dicho sistema.
1-4
Volumen I
Los componentes de un sistema de control son:
•
Controlador: es un instrumento cuya función es la de hacer la comparación de la
variable controlada con la de referencia, y la de determinar qué hacer con esta
diferencia.
Puede generar a partir de entradas previamente diseñadas, las salidas
requeridas.
•
Sensor: o también llamado elemento primario de medición, es un instrumento que tiene
la función de captar la variable a medir; es decir, responde cuantitativamente a una
variable.
•
Indicador o registrador: es un instrumento que tiene la función de mostrar el valor de la
variable.
•
Elemento de acción final: es un instrumento que tiene la función de influir en el sistema
según la señal de error transmitida; es decir, es el que toma las medidas pertinentes de
qué hacer para disminuir el error.
•
Transmisor: es un instrumento que tiene la función de captar la variable proveniente del
sensor y la convierte en un valor estándar. Se usa para captar valores a medir y lo
transforma a una señal estándar que se puede transmitir a distancia.
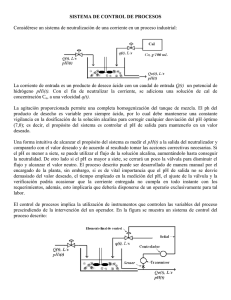
Sistema de control de lazo abierto
Es un sistema de control en el que la variable de salida no tiene efecto sobre la
variable de entrada. La salida ni se mide ni se retroalimenta para compararla con la entrada
de referencia; por tanto, para cada entrada de referencia corresponde una condición de
operación fija. En presencia de perturbaciones, un sistema de control de lazo abierto no
cumple su función asignada. La Figura 1.2 muestra un esquema de este tipo de control.
|
Entrada de
Referencia R
Controlador
Actuador
Variable
Proceso
Manipulada
Figura 1.2: Sistema de control de lazo abierto
Variable
Controlada C
1-5
Volumen I
Sistema de Control de Lazo cerrado y/o retroalimentado
Es un sistema de control donde se une o retroalimenta (feedback) la salida del
sistema, se compara con la entrada, y se ejecuta la acción de reducir la diferencia entre
ambas. Un diseño de un sistema de control de lazo cerrado ofrece los siguientes beneficios:
•
Incrementa la exactitud del sistema ya que puede diseñarse para manejar el error entre
lo deseado y lo medido.
•
Es insensible a la variación de los parámetros pero sensible a las señales de entrada.
•
Reduce los efectos de las perturbaciones, los cuales son en gran manera atenuados.
•
Incrementa la velocidad de respuesta.
•
Puede mejorar la estabilidad o ser dañina si no se aplica adecuadamente.
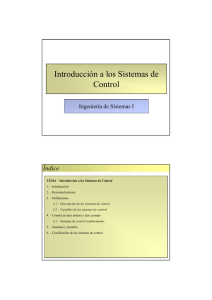
La Figura 1.3 muestra el esquema del sistema de control a lazo cerrado.
Perturbación
Entrada de + Error
Referencia R
-
Controlador
Actuador
Proceso
Controlado
Variable
Controlada C
Transductor
Figura 1.3: Sistema de control de lazo cerrado
La Tabla 1.1 presenta una comparación entre los sistemas de lazo abierto y lazo
cerrado.
1-6
Volumen I
Tabla 1.1: Comparación entre los sistemas de lazo abierto y de lazo cerrado
Sistemas de lazo abierto
Sistemas de lazo cerrado
1. Para cada entrada de referencia 1. La exactitud del sistema no depende de la
corresponde una condición de operación, la calibración.
exactitud del sistema depende de la
calibración.
2. En presencia de perturbaciones no cumple 2. El uso de retroalimentación hace que la
con la función asignada.
respuesta del sistema sea relativamente
insensible a perturbaciones.
3. Se obtiene fácilmente la estabilidad.
3. La estabilidad constituye un problema,
debido a la tendencia a sobrecorregir errores
que pueden producir oscilaciones.
4. Se usan en sistemas en los que las 4. Se usan en aquellas situaciones en que se
entradas son conocidas previamente y en los presentan perturbaciones previsibles y/o
variaciones de los componentes del sistema.
que no hay perturbaciones.
5. Es de menor costo.
5. Es generalmente de mayor costo.
1.4 CLASIFICACIÓN DE LOS SISTEMAS DE CONTROL
Los sistemas de control pueden ser de diferentes tipos, por ejemplo:
Sistemas de Control lineales o no lineales
Los sistemas lineales no existen en la práctica, ya que todos los sistemas físicos son
no lineales en algún grado. Los sistemas de control retroalimentados son modelos ideales
fabricados por el analista para simplificar el análisis y diseño. Cuando las magnitudes de las
señales en un sistema de control están limitados en intervalos en los cuales los componentes
del sistema exhiben una característica lineal, el sistema es esencialmente lineal. Para
sistemas lineales, existe una gran cantidad de técnicas analíticas y gráficas para fines de
diseño y análisis y para ellos se aplica el principio de superposición.
Volumen I
1-7
Sistemas de Control invariantes en el tiempo o variables en el tiempo
Los sistemas de control invariantes en el tiempo (sistemas de control con
coeficientes constantes) son aquellos en los que los parámetros no varían en el tiempo. La
respuesta es independiente del tiempo en el que se aplica la entrada.
Sistemas de Control de tiempo continuo o de tiempo discreto
En sistemas de control de tiempo continuo, todas las variables son funciones de un
tiempo continuo. Sistema de control discreto abarcan una o más variables que son
conocidas sólo en instantes discretos de tiempo (las variables sólo toman valores
puntuales).
Sistemas de Control con parámetros concentrados o con parámetros distribuidos
Los sistemas de control que pueden describirse mediante ecuaciones diferenciales
ordinarias, son sistemas de control con parámetros concentrados. Los que pueden
describirse mediante ecuaciones diferenciales parciales son sistemas con parámetros
distribuidos.
 0
0