La dualidad en la Programación Lineal Su utilidad en el Análisis
Anuncio

La dualidad en la Programación Lineal
Su utilidad en el Análisis
Económico-Financiero
MANUEL GÓMEZ DIAZ
Universidad de Santiago de Compostela
Departamento de Economía Financiera y Contabilidad
El planteamiento de un problema típico de maximización en la Programación Lineal puede ser el siguiente:
Maximizar:
x1 s-a,, x+ +0 x<b
Z=c1 x, •c2x2 + ...~cx
sujeto a
a~ x1
+
a12x,~... ~a; ~
2
—nn
x,=O;x2=O x=O
Si formamos las matrices:
a
a,~ a,,
1n
xI
a,n
~
-
A
.
b=
b,I
-I
—
.1
0ní
a,
h~,
(ni x ti)
J
(nix 1)
o
o
0=
x
o
(nx 1)
(nx 1)
e,... e~j
(1 xn)
podemos expresar el problema así:
Cuadenios de Estudios Empresariales. n~ 6, Servicio de Publicaciones 0CM. Madrid i996.
188
Manuel Gómez Díaz
Máx. Z=CX
AX=b
X=O (Se dice forma abreviada, matricial o canónica)
Para resolver un problema de PL. por el método Simplex, habremos de
convertir previamente en igualdades todas las desigualdades (inecuaciones
existentes) utilizando el conocido procedimiento de las variables de holgura:
.
2+.
aíxí+aaxz+
s-a x +x
.
.
.
.+tii2X
a,¡xí+%x
..
.
+a~¡tnxn
.*
x,,,,
.
matricíalmente se expresa:
[A
fl
siendo:
1
matriz identidad (¡u x u)
matriz de las variables de holguía (ni x 1)
En el caso en que las desigualdades tuviesen sentido inverso (=),la matriz
de la izquierda sería: LA..-fl y para obtener una primera solución básica se uti-
lizarían variables artificiales.
NaTACiÓN MATR1CL4L DE JA SOLUCIÓN DE UN PROBLEMA
LINEAL
Supondremos que los m primeros vectores de la matriz A (columnas) for-
man un programa base y la solución es óptima.
489
La dualidad en la Programación Lineal
Hacemos las siguientes particiones en las matrices:
al’
a,2
...
a,,
¡
a
£12
21
a1 a2
C
=
[C,, i C~]
=
a,,,
[c~e2 ...
...
a
a,,,
a
o,,, c,,,,~... e,,]
según nuestro anterior supuesto, la solución óptima es:
Z=CX=[C,,
AX=b
=
[xl =c x +c x
st
C,jx
[+1
[3 /V] x
=
EX,,
+
B/~
o
np”
;
y como X,,
on,,n
tenemos:
z=c x
4,,
EX1,
=
b
JA DUALIDAD
“A todo problema lineal, llamado primal, le corresponde otro que denominamos dual. Entre ambos existen una serie de relaciones y propiedades importantes”.
programa primal
(D1)
programa dual
190
Manuel Gó,nez l),az
Para un análisis sistemático de la dualidad dividiremos su estudio en cinco
partes perfectamente diferenciadas:
1) PLANTEAMIENTO
2) RELACIONES ENTRE PRIMAL Y DUAL (Teoremas)
3) RESOLUCIÓN DEL DUAL
4) SIGNIFICACIÓN ECONÓMICA DEL DUAL.
5) PRINCIPALES APLICACIONES EN ECONOMíA
PJANTEAMIENTO DEL PROGRAMA DUAL
Podemos enunciar las siguientes relaciones entre un problema primal (P1)
y su dual
a) El dual tiene tantas restricciones como variables existen en el primal.
b) El dual tiene tantas variables como restriccIones existen en el primal.
e) Los coeficientes de la función objetivo del programa primal son los términos independientes (con su signo) de las restricciones del dual.
d) Los términos independientes de las restricciones del programa primal
(con su signo), son los coeficientes de la función objetivo del programa
dual.
e) La matriz de coeficientes de las restricciones del programa dual es igual
a la traspuesta de la matriz de coeficientes de las restricciones del pri-
mal.
f) A un programa primal de maximización, le corresponde un dual de mini-
mización y viceversa.
g) El dual de un dual es su primal.
h) El sentido de la desigualdad o la igualdad de las restricciones del dual es
dependiente de la amplia casuística que puede haber en la presentación
del primal. Lo mismo puede decirse del signo de las variables duales.
A continuación abordaremos este problema y se extraerán las reglas de
general aplicación para plantear correctamente el dual, sea cual fuere la presentación del primal; pero antes haremos un breve recordatorio matemático
que creemos de interés.
Maximizar Zequivale a minimizar -z y minimizar Zequivale a maximizar -Z.
EJEMPLOS:
1) Máx. Z
3x,
+
5x,
+ 6x,
equivale a:
Mín.-Z=-3x1-5x,-6x3
191
La dualidad en la Programación Lineal
2) Mm. Z
=
+
3x,
+
equivale a:
Máx.-Z=-2x-3x.,-x3
Por otra parte:
AX=b equivale a -AX=-b
AX = fi equivale a -¡LV = -b
AX= b equivale a: AX=b
AX = b
Definimos como estmctura canónica en la programación lineal y le llamamos problema primal (P1) a la siguiente:
Máx. Z
=
CX
lix = b
X=O
Existe otra estructura, asociada a la anterior, que llamamos problema dual
(13,) y tiene la siguiente forma:
Mm. G br y
t Y=Cr
A
Y=O
=
Algunos autores denominan a las anteriores formas ‘problemas duales
simétricos”, en contraposición con los “asimétricos” o aquellos en que las restricciones aparecen con el signo igual, es decir: AX b.
ELEMENTOS DEL PROBLEMA DUAL
Y Vector columna de VARIABLES DUALES, (m
—
1)
CT Vector columna de RECURSOS DUALES, (n 1)
bT Vector fila de PRECIOS O RENDIMIENTOS DUALES (1 ni)
A1 Matriz traspuesta. COEFICIENTES TECNOLÓGICOS DUALES (n x ni)
O Escalar. VALOR DE LA FUNCION OBJETIVO DUAL
—
-
—l
192
Manuel Gómez Díaz
El problema primal puede presentarse como máximo o como mínimo y tanto las restricciones como las variables con distintos signos; como quiera que
el dual es una aplicación del primal, según se presente éste así resultará aquél.
Si partimos de un primal en forma abreviada, al considerar máximo y mínimo, así como los diferentes signos de variables y restricciones, llegaremos a
1 8 formas diferentes:
Máx.Z=CX
Mín.Z=CX
(2)
2 x 3 x3
=
ÁX~b
X~0
AX~ b
X no restringida en signo
AX~-b
(3)
X~=O
(3)
18 combinaciones diferentes
Si, además, tenemos en cuenta que dentro del bloque AX puede haber cualquier número de ecuaciones y de inecuaciones en ambos sentidos y que cada
una de las variables x~, independientemente de las otras, puede tomar los valores =(1; ~ =O, o ser no restringida en signo, el problema resulta más complejo.
Trataremos, pues, de establecer una metodología básica para llegar en cualqu ier caso, de forma inequívoca, al planteamiento del dual y, al tiempo, deducir unas reglas generales, de obligado cumplimiento, para alcanzar directamente el mismo objetivo.
Hemos definido anteriormente el problema dual como una aplicación del
primal en su forma canónica, es decir:
(Pa): Máx. Z
AX=b
X=O
—
CX
(D,): Mm. G
b’ Y
,4’Y=C1
Y=O
por lo tanto, cualquiera que sea la forma en que se presente el primal habremos de transformarlo ‘correctamente’ en otro equivalente que tenga la forma
canónica. Luego, la aplicación correspondiente nos llevará sin dificultad al
dual.
Para conseguir lo primero utilizaremos las propiedades matemáticas recordadas anteriormente y, cuando sea necesario, también recurriremos a cambios
de variables.
193
La dualidad en la Programación Lineal
DIVERSAS FORMAS DEL PRIMAL-DUAL
Casos de Máximo
1) (P1): Máx.ZCX
LV =b
(D1): Mm. O
X=O
br Y
=
AT Y=U
Y=O
2) (P1): Máx. Z
CX
AX =b
x =o
Forma canónica:
Máx. 7= CX
-AX=-b
T W
(D1): Mm. O
~Ar W>
X=O
-b
=
CT
W=O
y haciendo Y = W
-
Min~ O
=
A’ Y=CF
Y=O
3) (P
1): Máx. 7
¡LX
=
X=O
b
=
CX
bT Y
194
Manuel Gómez Díaz
Forma canoníca:
Máx. Z
AX =
b
AX=b
X=O
=
CX
Máx. 7 CX;
AX =
b
—AX=-b
X=O
[+]~
Máx. 7= CX
X=O
(Di): Mm. G
[Ar
[b ~ -br]
=
Ar}
_
=C’
[W]
W=O V>O
Mm. O
br y
T
Ar W Ar V> C
=
bT W
-
-
¡‘>0 vsi hacemos Y”~
Mm. O
=
br y
Ar Y=U
Y: no restringida en signo,
depende de los valores de 11
4) (Pr): Máx.Z = CX
lix =b
X=O
Forma canónica:
X=-R
MáX.Z=-CR
-AR =b
R=O
(D
1): Mm. O
=
br Y
~Ar Y=~Cr
Y=O
ó bien:
La dualidad en la Programación Lineal
Mm. G
195
=
br Y
ArY=CT
Y=O
5) (Pr): Máx.Z
=
CX
¡LX = b
X=O
Forma canónica:
X= -R
Máx.Z=-CR
-AR
=b
R=0
Mix. Z
Al?
=
-CR
=-b
R=O
(D1): Miii. O
Ar
w>
=
~br W
~Cr
W=O
haciendo -Y = W
Mm. O
=
b’ Y
~Ar Y> ~Cr
A’ Y=Cr
y~O
196
Manuel Gómez Diaz
6) (P1): Mix. Z
AX
=
=
CX
b
X=o
Forma canónica:
Máx. 7
=
CX
AX =b
AX>b
-AX=-b
X=O
Haciendo X
=
-R
Máx.Z=-CR
-Al? =b
Al?
= -b
l?=O
(Di): Mm. G = Lb r
TA
_
brjIWI.~brwbrv
-C It -A rW+A rí,>~c
[-A
I~>0
Mm. G
=
A’ (V-W)
br (PV
>
-
V)
-c~ ; A~ (PV-U)
W=0;V=O
y haciendo Y
Mía. G
=
PV Y
-
br Y
Arr =U
no restringida en signo
=Cr
197
La dualidad en la Programación Lineal
7) (P1): Máx. 7
=
CX
lix = b
~sorestringida en signo
Forma canónica:
x=x’-r’;
Mix. 7
=
;
-
X”
Mix. z=[C
(A
=0;X’ =0
C (X’ X’)
A (X’- X’)
X’ =O
X’
=b
=O
-C1[f~
-AII[fj=b
X’=0
‘
(D1): Mm. O
br PV
=
[
[iA]
[w]=
W=0
T PV
Mm. O
=
h
[iAVr][§jj ;A rw0
=
PV=O
Mm. O = br PV
ArW= CF
¡1/=0
198
Manuel Gómez Díaz
8) (P
1):
Máx. Z
CX
lix = b
X
no restringida en signo
Forma canoníca:
X=X.-X,-.X’>O
x.’>O
Máx.Z=C(X’-X”)
X’=0
X”>O
Máx. Z=[C
[-A A]
—C}
[f’j~-b
[f’~]
(Da): Mm. G
-U PV
[w]=
[~iir]
w=o
Mm. O
=
rwl
[-A
LA
-U w
= [Cj
L<’i
rwJ
W=
O
y haciendo PV
Mm. O
=
FA
[-A
FYJ
bt Y
=
Y=O
ó bien:
Mm. O = b’ Y
Ar Y
Y=O
=
Cr
=
-
Y
199
La dualidad en la Programación Lineal
9)
(P,): Máx. 7
¡IX
=
CX
=
b
X no restringida en signo
Forma canónica:
x’ >0 X”>O
x=r-r’;
Máx.Z=C(X’-X’
A(X~X”)=b
21>0
o bien:
Máx.7=C(X’-X’)
X’=0, 21”
Máx. 7
=
[C -Cl
=0
[f~
21>0
(D):
Mm. G =[b T ~bT] [PV]
¡7=0, 7=0
Min.G=bFW~b~ 7= b~(W-V)
Arw~Ar 7> Cr
~AT¡7 + Ar 7=~Cr
Mm. G = br
AT(W Pfl =Cr
(¡7-
7)
-
AT(W~ v)=~Cr
¡7=0;7=0,y haciendo Y=¡V-7
200
Manuel Gómez Díaz
Mm. O
bt
=
>7
A’ Y=CT
A~ Y=Cr
no restringida en signo
O lo que es lo mismo:
Mm. O
=
br Y
¡IT Y=C’
no restringida en signo
Casos de Mínimo
1) (P1): Min.Z=CX
¡IX =b
X =O
Forma canónica:
Mix.
¡IX
-Z=-CX
s b
X =O
(D1): Mm. -G br PV
AY ¡7 =~U
=
¡7=0
y haciendo ¡7
=
-
Y
Mm. ~G=~bry
~¡Ií
Y>
-U
Y = O; o lo que es lo mismo:
Mix. O
=
¡IT Y=Cr
Y=O
br y
La dualidad en la Programación Lineal
2)
(Pi): Mm. 7
=
201
CX
AX =b
X= O
(Dr): Máx. G
AT =CF
Y=O
3) (Pi): Mm. 7
AX
=
=
CX
b
X=O
Forma canónica:
Mix.
-Z=-CX
¡IX =b
¡IX =b
X= O
Mix. -7= -CX
¡IX =b
-¡IX =-b
21=0
es decir:
Máx.-7=-CX
[IÁ]rr]=[t]
X=O
br y
202
Manad Gómez Díaz
Mio. —G =[b ~ —b
¡7>0
Mm. -G
1[’¡.?j=b
‘(W-J’3
7>0
=
b’ (¡7- ¡9
AuW~ATV>~CT;Ar(W~ P9>-CT
¡7>0 V>0
y haciendo 7- ¡7 Y
=
Mm. -G
=
-bT y
7> ~Cr
y~ no restringida en signo
~¡IT
6 bien:
Mix. G
=
br >
AT 7=C’
Y: no restringida en signo
) (P
1): Mm. 7
CX
¡LX =b
27=0
Forma canónica:
hacemosX’-R
Mm. 7
-Al?
-
-CI?
=b
R=0
Mix. -7=CR
-AR
=b
R=O
203
La dualidad en la Programación Lineal
(03: Mm. G
br ¡7
t
PV>
C’
-A
=
¡7=0
y haciendo Y
=
-PV
Mín.-G-b’Y
¡IT
Y=U
Y =0, o lo que es lo mismo:
Mix. O
=
b’ Y
¡It Y=CF
Y=O
5) (P
1): Mm. 7
CX
¡IX = b
X=O
Forma canónica:
hacemos X
Mm. 7
=
-2?
-CI?
=
-¡IR =b
R=0
Mix.
Al?
-z
=
CI?
=-b
I?=0
(Di):
Mm. oT -h’ Y
AY =C
Y =~; o lo que es lo mismo:
=
Mix. O bt y
¡Ir 7=C’
=
Y=O
204
Manuel Gómez Díaz
6) (P,): Mm. 7
CX
=
b
¡IX
X= O
Forma canónica:
hacemos X
Mm. 7
-AB
=
-R
-CI?
=
b
=
I?=O
Máx.
-¡IR
-z
=
CI?
=
CI?
=b
AB =-b
R=0
ó sea:
Mix. -Z
I?=O
(D
1) :
Mio. —G [b
—b
=
[—.1’ .á
1 [~j=[C
¡7=0
V>O
iKl
r]
es decir:
Mío. -G
~¡Ií
=
b’jW- U)
(PV - ¡9> Cr
¡7>0 V=O
y haciendo Y
=
-(¡7 - U)
b ‘U
205
La dualidad en la Programación Lineal
Mm. -G -bT
AT Y=CT
>1
Y no restringida en signo
O lo que es lo mismo:
Máx. G
b’ y’
Ar Y=U
no restringida en signo
7) (Pi): Mm. Z
=
CX
¡IX =
b
X no restringida en signo
Forma canónica:
XX’-X’j
X’>0
X”=0
Mín.ZC(X’-X”)
A (X’-X’ ) =b 27’> 0;
Mm.
z=[z
[A —A]
-c}[f1
kYil=[b]
X=0 X’VO
Mix.
[A
-A]
-z -[o -o]
[fI
[fj=[&
21=0:X”=0
206
Manuel Gómez Diaz.
Mm. ~GtbTW
r¡IT1 {w]=[j1i]
W=O
o sea:
Ps-Fn. ~~C=bTW
FA’
1>F<’i ;A rwc
PV
L-A’wYLC’i
W=O
y haciendo el cambio Y
Min.-G
=
-¡7
- br Y
=
.jTy> ~Cr
1Ty<
Y =O
Cc
o lo que es le mismo
Mix. O
=
bT y
AT Y=CF
¡It
Y=C’
Y =O, que equivale a:
Máx.
~1F
Y=O
O
b y
La dualidad en la Programación Lineal
207
8) (P1): Mm. Z = CX
¡IX
=b
21 no restringida en signo
Forma canónica:
X21’-X”;
21’ =0.21”=0
Mín.Z=C(X’-21’j
X’=O; X”=0
Mix. -Z=-C(X’-Xfl
-A(X’-X”)
21’> 0
S-b
21”> 0
Mix. -Z
=
[-C C]
[Íj
[—A A] [f4=[-bl
21>0
;
Mm. -G
=
~bFY
[~;]
w=
Y=0
Mm. -G
=
-b ~Y
=
Y=O
o lo que es lo mismo:
208
Manuel Gómez Díaz
Máx. G = br JI
¡Ity~ Cr
¡IT
y’~
Y=O
o sea:
Mix. G b’
Y=CF
=
¡It
Y=O
9) (J-’~): Mm. 7
=
CX
¡IX = b
21 no restringida en signo
X=X’-X”;
X’=O. X”=O
Mín.7C(X’-X”)
X’>0
o bien:
X’=0
Mix. -Z=-C(21’-X”)
21’> 0
‘
X” =O
o en forma matricial:
Mix.
X’=O;
JI
La dualidad en la Programación Lineal
Mm. —G
209
=
[b T —b
[¡~j=
[-g;]
¡7=0; V=O
Mm. ~G=br W~br V
bT(W-
AT W~ArV>~Cr
~ATPVA~ATV=Cr
¡7=0;V=0
Mm. ~Gbr(W~¡9
AT (¡7- ¡9
>
At (¡1/- ¡9
<
-U
haciendo V - W = Y
y
Mmn.~G~bTY
~Ar y>CI.Ary>Cr
¡It
Y<~CrAtY>Ct
no restringida en signo
o lo que es lo mismo:
Mix. G = b’ Y
Ar
yc~
no restringida en signo
210
Manuel Gómez L>íaz
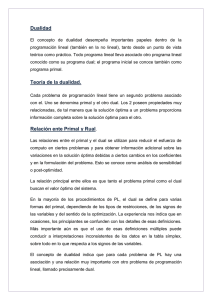
CONCLUSIONES
Podemos representar así las distintas soluciones anteriores:
CASOS DE MAÁ7MO
Signos primal
Signos dual
--
‘/:
>-‘‘
V.:
=•‘
CASOS DE MINIMO
Signos primal
Signos dual
-
=0
~=0
<0
=0
No restr.
— —
y.:
=— -
No restr.
—
=0
=0
Rs>’
~/.: = Rs”
V.: <
=0
-
=0
..-.
—
No restr.
V.:
> O
V:Norestr.
=0
=0
V.: No restr.
=~O
No restr.
V.: No resto
No restr.
<
No resir.
—
-
V.: No resto
1?.:>
-
V.: No restr.
--
--
Rs”
V.: No resto
Claves:
R. (restricciones)
V. (variables)
No resto (no restricción en signo)
><
Distinto sentido
Mismo sentido
O,stinto sentido
No restr.
No restr.
~y<
Mismo sentido
La dualidad en la Programación Lineal
211
REGJAS OBTENIDAS
Cada restricción primal da lugar a una variable dual, por lo que habrá
tantas variables duales como restricciones primales.
Y) Cada variable primal da lugar a una restricción dual, por lo que habrá
tantas restricciones duales como variables primales.
3~) A la función objetivo primal Mdx. Z, se corresponde una función objetivo dual Mhz. G y a cada función objetivo primal Mía. X, se corresponde una
dual Mdx. (3. (Añadimos que los signos de los coeficientes de las respectivas
variables duales serán los de los “oportunos” vectores del primal, con independencia de que en el óptimo dichas variables deban tomar valores mayores
que cero, menores que cero o ser libres en signo)’.
4~) Casos en que el primal es un máximo:
a) Cada restricción del primal determina una variable dual de signo (sentido) contrario al suyo, y si aquélla es igualdad, la variable dual resultante es no restringida en signo (libre).
3)
Restr. (P,)
=
variab. (Da)
=0
Restr. (P,)
=—~
variab. (D,)
=O
Restr. (Pi) igualdad
variab. (D,) no restringida en signo
—‘
b) Cada variable primal determina una restricción dual del mismo signo
(sentido) y si aquélla es no restringida en signo, la restricción dual resultante es una igualdad.
Variab. (Pa) =O
—
restr. (13,)
=
Variab. (P1)
—~
restr. (Da)
=
=O
Variab. (Pi) no restr.
—~
restr. igualdad
5a)cNasos en que el primal es un máximo:
a) Cada restricción del primal determina una variable dual del mismo signo (sentido), y si aquélla es una igualdad, la variable dual resultante es
no restringida en signo (libre).
La forma ‘SIMÉTRICA’ de la dualidad es la quc se obtiene a partir de un programa primal en su forma canón ca.
Algunos autores en los desarrollos que hemos hecho anteriormente no hacen el cambio de variable, por
e¡emplo W = -Y, para que la formulación dcl programa solución quede con signos positivos. En tal casola
vadable que para nosotros aparece al tina> como “menor que cero”, según ellos aparecerá como ‘mayor quc
cero” y sus respectivos coeficicntcs en la función objetivo y en la matriz A irán prcecdidos dcl signo menos.
Volveremos a referirnos a ello con mayor extensión.
Manuel Gómez Díaz
2>2
Restr. (P1)
variab.
=—
Restr. (P1) =
variab. (O~) =O
—---*
Restr. (P1) igualdad
(Di) =O
variab. (Da) no restringida en signo
—.
b) Cada variable primal deterínina una restricción dual de signo (sentido)
contrario, y si aquélla es no restringida en signo, la restricción dual
correspondiente es una igualdad.
Variab. (P1)
=O
—
restr. (Di) >
Variab. (E)
=O
—~
restr.
Variab. (E1) no restr.
—
(~)
<
restr. igualdad
Creemos oportuno hacer las siguientes matizaciones para la correcta aplicación de las anteriores reglas:
En toda La casuística tratada hemos considerado como de única naturaleza
las restricciones que componían el ‘bloque”:
AX =b
es decir, que todas tenían igual signo (sentido de la desigualdad, en su caso);
sín embargo, la realidad puede —y de hecho lo hace— ofrecer pluralidad de
signos en un mismo problema. En tal caso, a cada grupo “homogéneo” de restrícciones (AX =b; AX=b ó AX < b) le aplicaremos las reglas conocidas con
índependencia del otro grupo u otros dos, con los que haremos lo mismo.
Demostración:
Máx. 7
=
CX
¡I’X=b’
Forma canónica:
Mix. Z
=
CX
=27=b’
X= O
-¡I
X =-b”
27=0
La dualidad en la Programación Lineal
en forma matricial:
Mix. 7= CX
Fbi
Al
A 121< ¡—b
A
Ib
AJ
[—b
Li
‘4
J¡
X=O
[
PV
Dual: Mía. G =[b’T
~b”T b”’T —b”’i
1
¡71
31
¡71
[¡71
‘¡7’
3l =CT
I¡71
[¡7J
1
4
¡7>0
¡7>0’
Min.G
¡1’3,
=0
¡74—>0
~
~
W~=O: ¡7,=0; ¡73=0; ¡74=0
y haciendo:
wI
Y!
=
w
3-w4=y3
A~ty+ATy,+¡I~~>ty3=Cr
y! =o
Y2 =0
Y3: no restringida en signo
213
214
Manuel Gómez Díaz
Resolución con la aplicación de las reglas
br Y
1)
Mix.Z=CX
______•
Mm. O
2)
Tres restr. primal
—*
Tres variables duales
—
Y
no restr.
3
3) Una variab. prim.
que:
Mm. G
=
=
Una restr. dual del mismo signo
—>
U’ Y~ + U’
¡I’Ty +¡I”Ty
Y!
O
Y. +
=
b”’ ‘Y3
+¡I’’’Y3=&.
=O
72=0
73: no restringida en signo
RELACIONES ENTRE PRIMAL Y DUAL (Teoremas)
Teorema de la dualidad
“Si un problema primal (dual) tiene una solución óptima finita, su correspondiente dual (primal) tiene una solución óptima finita y los extremos de
tales funciones lineales son iguales”, es decir:
(E,)
(~)
Máx.Z
=
Min.G
Mín.Z
=
MáX.G
DEMOSTRACIÓN
Definiciones
7
=
Vector fila de los rendimientos indirectos:
{Z~Z2
215
La dualidad en la Programación Lineal
¡7
=
Vector fila de los rendimientos marginales:
Vector
21=
Iii
11
r
=
=
fila
siendo
...
21.J
el vector columna
de los coeficientesde la combinaciónlineal equivalente de
[P~P2
Base óptima del primal
P,]
Solución óptima del primal
por lo tanto:
P=BX;¡I=BX;X=B14
270
“fi’ b
;
b
=
11210
0
f(X’)”Mix. Z=Q21
7=QX”C
0B-A
¡7=C-Z=C-C0B<A
y si estamos en el miximo:
¡7=0 ,osea:
¡7 C C0 21= C
=
-
-
C011 -l A =0
lo que implica:
C021=C0B’A=C
216
Manuel Gómez Díaz
Sea Y0
=
yOT
[Y=) una solución del dual, por lo que:
Definimos Y’
=
—
[yO
YO
..~
C
0 E
y postmultiplicando por A:
Y’¡I =C0BIA=C0X=C
por lo que Y’ A =C, o bien A’
1 Y
~
s.j
‘=ua.,
y~’.”’I’JA
AM
.-i,,.,1
.,
‘0”
=
~
1’
W
=U
‘““Y”~’t~
de restricciones
ni’ Yprimer
> O bloquecraíírcln
hinmnie de
—.
—~
-
restricciones del dual2, por lo que Y’ es una solución del dual.
Valor de la función objetivo dual para la solución Y:
G
=
bT Y=
yT b
=
C
0 fi> b
=
C, ~O
=
Máx.
7
así, pues, para la ecuación Y’, el valor de la función objetivo dual es igual al óptimo
de/primal ().
Por otra parte, ¡IX =b y WY’ b, de donde G
y
=Y’ AX
para cualesquiera 21 e
como Y’ A =C, postmultiplicando por X, tenemos Y’ AX =CX=Z (cualquiera),
fIV¾~t(fl
con tu que
ct. u •u que ea iu iii¡3’HU,j ~ 7 ~J Y’), ~
el valor de la función objetivo dual es siempre mayor que el de la función objetivo
~j
primal (**)
De la síntesis de los enunciados (*)
y (~“‘),
se deriva que de no existir soluciones
acotadas en un primal y en su dual, los valores que toma la función objetivo de cada
uno en los óptimos, son las mismas.
2 C~, 8
es el vector de los rendimientos indirectos de las variables unitarias (generalmente de holgura> en una solución óptima de un máximo, en donde todos tos rendimientos marginales son nulos o negativos, por lo que estén o no en la base, dichas variables tendrán rendimienlos indirectos no negativos.
La dualidad en la Programación Lineal
217
Tendremos, no obstante, que hacer una matización. Nuestro anterior desarrollo se ha basado en tomar el primal como un problema de máximo; sin
embargo, si lo tomamos como un mínimo, los enunciados (*) y (**) han de
invertirse pero, lógicamente, la intersección de ambos lleva a la misma sínte515~.
0
br y
c,
270
(1’)--- Mix.
4
~0
210
Yo
1
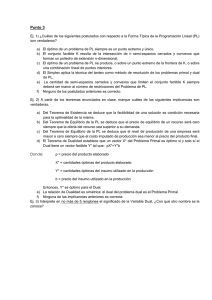
(P)--- Miii.
Comportamientos posibles de un par de problemas Primal-Dual
Programa dual factible
Ambas soluciones óptimas
Programa dual no acotado
Programa dual infactible
Programa primal no acotado
Ambos no tienen solución
Teorema de la holgura complementaria
A) Este teorema fija las condiciones ‘necesarias y suficientes” para que dos
soluciones X e Y sean óptimas, respectivamente, dc (P
1) y (D1).
B) En segundo lugar, permite establecer unas relaciones entre las variables
primales, duales y las de holgura, en el óptimo, de relevantes implicaciones
economicas.
‘At hacer extensivo el teorema de la dualidad al caso del Dual Asimétrico, siguiendo el mismo desarrollo que hacemos con el simétrico, no podremos demostrar que C<~B =0pero, teniendo en cuenta que en
esle caso Y es libre en signo, e,s condición suficiente para ser solución del problema que Y’ A = C0B ‘=C.
218
Manuel Gómez L)íaz
Podemos enunciarlo del siguiente modo:
Sean:
(P,)
Máx. 7
CX
¡IX =b
27=0
(Da)
Mm. G
—~
=‘
b’ Y
¡ItJI=C’
O si ~0 e Y0 son soluciones, respectivamente,
JI>
la condición necesaria y suficiente para que sean óptimas es:
Y>t (b
-
¡IX>)
2701 (¡Ir Yo
-
O
o>
C)
DEMOSTK-l CIÓN
Al ser 270 e Y0 soluciones de (E>) y (13,), se cumple:
AX0=b ;
ATY0>C’
21=0
Y>0obien:
b
-
¡I)<0>
A~ Y0
-
Q
C’> O
y si multiplicamos la primera por Y y la segunda por X ~‘, no se afecta el sentido de la desigualdad:
II Y>’ (b
> O
=
-
¡LV)
N”
(A’ Y> C’) =O
0’ (1> .4270) ~~0T
M+ N Y
~~Yotb~Y~ A
270t
-
(¡IT
220+xot
Y>
-
U)
> O
¡IT yO 2707 (“=0 (los
términos 2 y 3 son iguales)
07 ~-x~’ cí=brYo~cV>o
MI-N=
En el caso de un
problema ydual simétrico, el enunciado sería:
V <AY - 1,) = O, K’ <C’½Xl = O
y su demostración similar a la que hacemos para el primer caso.
La dualidad en la Programación Lineal
219
Sabemos que 7 CX ~ ; J Y0 (3, y como se demostró en el teorema
anterior: (3=7 en el óptimo, tenemos que:
—
—
Al + N
r
br
=
GV
-
=
o
Como hemos partido del supuesto M =y N =0, necesariamente sucederá
que:
Ma Y0T(b
¡I270)
-
=0
U)
O
c.q.d.
Este teorema, denominado ‘de la holgura complementaria”, tiene un relevante significado económico, que más adelante analizaremos. Sus implicaciones inmediatas son:
1) Y0>O
implica A210=b
2)AXO <b
implica Y0
3)X0>0
4)
¡It
}~0>
implica
C’ implica
=
A’
Y0
270
=
O
=
U
O
Otra forma de expresar estas conclusiones es ¡a siguiente:
~
Y0
1 =0
Y%0
;~,,±2
;
0+
Y%±~
=
O
; Y
221%
=
O
;
es decir:
“Cuando en un óptimo una variable de holgura del primal (dual) alcance un
valor positivo, la variable dual (primal) correspondiente a la restricción a que
pertenezca aquélla será igual a cero”. O también, “cuando en un óptimo una
variable del primal (dual) alcance un valor positivo, la variable de holgura dual
(primal) que pertenece a la restricción asociada a aquélla tomará el valor
cero
A pesar de la gran importancia económica de este teorema, es verdadera-
mente “infrecuente’, por parte de los tratadistas, reparar en que tal como se ha
demostrado y enunciado resulta incompleto, hasta el punto de dar pie para
cuestionar prácticamente todo su valor
220
Manuel Gó,nez Díaz
El que un producto de dosfactores no negativos sea cero implica, sin lugar
a dudas, que si uno es positivo el otro es cero, pero no queda excluida la posibilidad de que ambos sean cero. En este caso, el contenido explicativo del teorema se disiparía, lo mismo que buena parte de sus implicaciones económicas, Si queremos recuperar su valor pleno, tendremos que demostrar que
tal posibilidad no es posible, es decir:
(b 2qy0)
(A’ Y>
+
Y>
=O
-
-
U)
-i-
210=0
DEMOSTRACIÓN
Sea el siguiente sistema de desigualdades:
b
- ¡IX = O
¡II Y-CT=O
-Y’ b
+
Cx =O
las dos primeras corresponden a las restricciones (E
1) y (D1), Máx. y Mm.,
respectivamente, y la tercera, según ya conocemos, se da en el caso inverso
(Mm. y Máx.).
Si multiplicamos en las dos primeras a (b) y (CT) por una variable (t), las
desigualdades siguen cumpliéndose con tal que esta última alcance el valor
adecuado; es decir:
AX =O
¡Ir Y-tC’=O
tb
-
-Y~b+CX>0
siendo Y>0X=O;t=O
sistema que también puede expresarse asi:
K; ~[fl
~A
La matriz de coeficientes es “antisimétrica”, o sea: M
MT y, partiendo
de un Lema de “Minkowsky y Fargas”, se llega a un teorema matemático cuyo
enunciado es: “Dadas las desigualdades AX =(1 X < O donde A es una matriz
antisimétrica A AT), hay una solución X que cumple:
—
(
—
~4X~X>0
La dualidad en la Programación Lineal
221
que, aplicado al caso que nos ocupa, resulta:
O
¡I
-b
T
‘
1 -0’] Vi +VI>o
es decir:
-¡IX + tb
*
Y> O
A ‘Y-C’t>-X>O
-b ‘y~CX~t>O
puede suceder que t> O ó t
0, supongamos que se da lo primero. Si dividimos poz
(í) cada inecuación, el sistema sigue cumpliéndose:
—A t
A
—
+
b
_
-
C
+
y
haciendo
l=x
1
1t
1
*
t
-b
5T >0
—
1>0
1
‘Li ~CX >1>0
=
1 (las tres mayores que cero). el sistema inicial
quedaría:
b -¡IX =O
¡Ir y’~~r>~
-b’ 1’’
+
CX’
=O
Las dos primeras inecuaciones del sistema corresponden a las respectivas
restricciones (Pa) y (13,) (Mix., Mm.) y la tercera es típica cuando el primal es Mínimo
222
Manuel Gómez Díaz
y el dual Máximo, por lo que para darse las tres simultáneamente esta última se
verificará como igualdad, lo que sólo sucede en el óptimo. Asi pues:
21’
Y’
y
si tal conclusión la llevamos a
0’)
2=
0
=
Y
de la página anterior, sustituyendo
y
—
porXty
5
Y
—
por Y ) llegamos a:
1
(b - kV0) +
O
~A’ Y0 - C ) + X0> O
quedando así demostrado el Teorema de la holgura complementaria en los dos
sentidos, o sea: u... y cuando la variable de holgura del primal (dual) es cero,
la correspondiente variable dual (primal) es positiva, etc.’.
Y0>
RELACIONES QUE EXISTEN EN LA SOLUCIÓN ÓPTIMA ENTRE LAS
VARIABLES DEL DUAL (PRIMAL) Y LOS VALORES DE LOS
RENDIMIENTOS DIRECTOS Y MARGINALES DEL PRIMAL (DUAL)
Definición: Llamaremos variables duales estructurales a las generadas
directamente por las restricciones del primal, es decir:
y variables de holgura duales a las:
y, oportunamente, podremos decir lo mismo de las variables del primal.
Con anterioridad hemos demostrado que en el óptimo se cumple que:
Más. 7= Mm. G
~0
210
=
b7 Y0
La dualidad en la Programación Lineal
y
como 21
11
-‘
223
b, sustituyendo,
C08
11% E
3=Y9Tb
b=b’Y’
-l =
yOT
sabemos que:
C
0B -JA
c0n-tj
J}=[COR’
=zn+l
z n+2
z 2’ z
:~
zn+,fl]
n,,n
Estamos, pues, en condiciones de hacer el siguiente enunciado:
1) “Si el primal es un máximo canónico (problema simétrico), las variables
duales estmcturales son iguales en valor a los rendimientos indirectos dc las
variables de holgura (o de otras con vectores unitarios, si las hubiere). Y si el
primal es un mínimo (igualmente en el caso simétrico), las respectivas variables duales estructurales son iguales a los rendimientos indirectos de las varíabies de holgura del primal cambiados de signo, con la excepción de ser del
mismo signo las correspondientes con posibles variables primales unitarias y
positivas”.
Así pues:
Y1 =Zn+l
Y2=Zn+2
‘
Yjj<Z,p~q~j
Por otra parte, si el primal es:
Máx. 7
¡IX =b
21=0
=
CX
Esta segunda parte del enunciado no ha sido demostrada, pero resulta evidente al tener en cuenta que
las variables de holgura del mínimo considerado se corresponden con vectores unitarios negativos.
224
Manuel Gómez Díaz
su dual desarrollado será:
a~, Y+a
1
21 Y~
2
•a
‘
a~ 1<-a
22 Y,+.
.
.
Y-Y
-r“‘2
ka,», Y
<Y
“e
»~1~~
también puede expresarse de la forma:
Y
a>, a,>
a
—I
0
...
O
a,, a,2
a,
0
-l
...
O
a>,
a,
...
a
—1
Y,
Yo’
Y
Y
o lo que es igual:
y operando:
¡IT
y
Y’ A
-
íY~
-
Y’,,
=
=
U
C
c
c
225
La dualidad en la Programación Lineal
y como sabemos que en el óptimo yT — C0 11 -l
C0 B -t A
-
Y’,,
C, 11
-
C
-~
A
=
=
C
Y>,,
por lo tanto:
lo que permite hacer el siguiente enunciado:
2) “En el óptimo, si el primal es un máximo canónico (simét.) las variables
de holgura del dual toman el valor de los rendimientos marginales —cambiados de signo— de las variables estructurales del primal. Y si en el mismo caso
simétrico, el primal es un mínimo, las variables de holgura del dual
6. tomarán
el valor de los mismos rendimientos del primal, pero con su signo”
El caso de duales asimétricos
Sea el primal:
Máx. 7
¡IX
=
2=
CX
b
27=0
su dual será:
Mm. O
=
b’ Y
A’ Y =Cr
Y: libre en signo
Máx. 7 = CX
AX = b
X O su dual será:Mín. G
ATY_ CT
—
bT y
6 Esta segunda parte es evidente si t enemos en cuenta que, en tal caso, e’ dual será un máximo y las
variables de holgura positivas.
Manuel Gómez Díaz
226
Las restricciones del dual pueden expresarse:
Y
a”
a>, a,,
a’
Y,
a
1
a,,,
.l
O
Y
Y‘‘‘~1
a,»
Y
[¡I’;ÍJ
A’Y~JY
6
-C’
o bien:
Y ¡I+1”,=C
y teniendo en cuenta qtte en el optimo
(3, 21
=
(3,
E
b
(3,
/3 -I
=
1< y ~
=
Y b
y
sustituimos Y por su valor:
(3,11< A + JI
2=
(3
o sea:
Y,,’ »C’—C,B’A=W
es decir, en el óptimo:
y
=WY
2
=W 2,
Y st,, =~M~
cl.
e,
e
La dualidad en la Programación Lineal
227
Si el primal es:
Máx. 7= CX
¡IX
=
b
21=0
el dual será:
Mm. G
=
b> Y
A>,Y=U
Y: no restringida
y como las variables de holgura tienen, en este caso, vectores unitarios negativos, siguiendo el anterior desarrollo obtenemos:
Y~’ ~=C?0B
‘¡I
-(3222
-w
es decir:
=
-W> ;
2=
~
Y~ =-W,
Finalmente, en los problemas asimétricos, tanto si el primal es un mínimo
como si es un máximo, no existen variables de holgura primales (Xm+í
Xm+2
Xm+n), por lo que no tiene sentido hablar de rendimientos indirectos ni marginales de las mismas. Consecuentemente, los valores de las
variables duales estructurales no podrán relacionarse con los rendimientos de
aquéllas como hemos hecho en (1), podremos, sin embargo, relacionarlos con
tales rendimientos correspondientes a posibles variables estructurales del primal que tuviesen asociados vectores unitarios en la matriz A.
(En el análisis de la significación económica de la “Dualidad” volveremos
sobre estos detalles).
Manuel Gómez Díaz
22R
BIBLIOGRAFÍA
BUEFA,
ES.;
DvER,
J.S.: Ciencias de la Administración e investigación de Operaciones.
México: Limusa.
CHARNES, A. CorWER, W.W.: Managemení Models and Industrial Applic’ations of Linear
Programming. Nueva York: Wiley.
GAss,
SI.: Programación Lineal. México:
CECSA.
KAUI<MANN,
A.: Métodos y modelos de la investigación de operaciones. México: CECSA.
Lt.EWELLYN,
R.W.: Programación Lineal.
PRAWDA,
i.W.:
ROMAKINE,
Barcelona: Marconiho.
Métodos y modelos de investigación de operaciones.
México:
Ml.: Elémenís dalgébre linénire el de programation linéaire.
Limusa.
París: Fyrolles.
SUÁREZ SUÁREz. AS.: Aplicaciones económicas de la programación lineal.
diana de Publicaciones.
B.U.F.,
Gua-