Actuadores
Mecánica básica
Robot: dispositivo mecánico programable capaz de ejercer fuerzas.
Mecánica: asegurar que se ejerce la fuerza justa para conseguir el movimiento
deseado.
El movimiento se consigue mediante una fuerza.
Los condicionantes de la fuerza son: la dirección, la magnitud de la fuerza y la
masa sobre la que se ejerce. .
Máquinas sencillas
Plano inclinado:
La fuerza necesaria se reduce con la distancia
Ventaja:
Compromiso entre fuerza y distancia
Ventaja:
Palanca:
Engranajes:
Lo que se gana en fuerza se pierde en distancia
Ventaja:
Dispositivos mecánicos
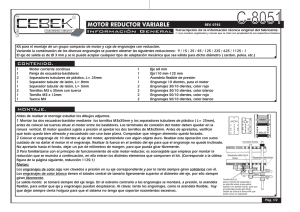
Tipos de engranajes:
Ruedas dentadas: Cambio de fuerza
Cremalleras y piñones: Cambio de rotación a movimiento lineal
Gusanos: reducen la velocidad enormemente
Otros:
Cigüeñales
Poleas
Manivelas
Ejemplo compuesto: El diferencial (giro de los coches).
Motores
Transformar la energía en movimiento.
Distintos tipos de energía: neumática, hidráulica, eléctrica.
En robótica generalmente motores eléctricos.
Motores de corriente continua
Consisten en imanes permanentes y electroimanes.
Al activar los electroimanes reaccionan contra los estáticos produciendo
movimiento.
Parte de la energía se pierde en calor y rozamiento.
A voltaje constante circula más corriente en función del trabajo que realiza el
motor (gasta más empujando que avanzando).
A más corriente más fuerza rotacional (par, o torque).
Los motores eléctricos son eficientes para girar con poca fuerza y gran velocidad
(ventiladores).
Para cambiarlo se usan engranajes.
El par y los engranajes
La fuerza tangencial a su circunferencia en el vértice de un engranaje es igual al
producto del radio y su par:
Combinando engranajes se puede modificar el par del motor
Si el tiene radio con par genera una fuerza perpendicular a su circunferencia
Si se mezcla con, que genera se genera un par
El par resultante es proporcional al par inicial y a la diferencia de radios
Si el par aumenta, si disminuye.
Si el engranaje de salida es mayor que el de entrada el par aumenta, si es menor
disminuye.
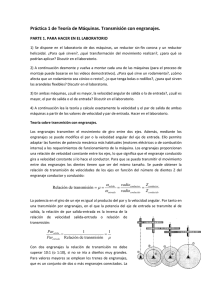
La velocidad y los engranajes
Igual que el par la velocidad cambia al combinar engranajes.
Circunferencia del engranaje 1 es .
Si es el doble de , este tiene girar al doble de velocidad.
Los dientes están bien diseñados para evitar pérdidas.
Para aplicar una reducción se conecta el motor a un engranaje de 8 dientes uno
de 24.
Se reduce la velocidad por 3 y se aumenta la fuerza tres veces.
Se pueden formar cadenas, p.e. 2 cadenas consiguen una reducción
Si el engranaje de salida es mayor que el de entrada la velocidad disminuye, si es menor
la velocidad disminuye.
Servos
Servo motores: motores capaces de colocarse en una posición
Básicamente un motor de corriente continua, engranajes, un sensor de posición y
electrónica para controlar el motor.
Suelen estar limitados a 180 grados.
Se controlan con una onda con una serie de pulsos modulados en anchura.
La anchura (longitud) marca la cantidad de giro.
El control de la anchura es crítica.
La separación de los pulsos no es importante.
 0
0