movimiento armónico amortiguado - Universidad de Castilla
Anuncio

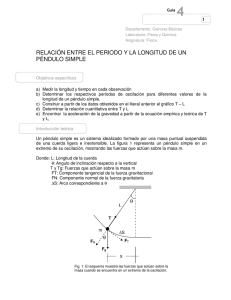
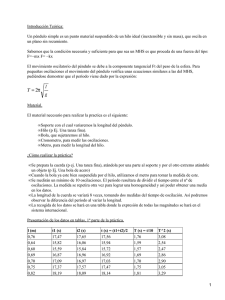
Departamento de Física Aplicada Universidad de Castilla-La Mancha MOVIMIENTO ARMÓNICO AMORTIGUADO OBJETIVO Medida experimental de la variación exponencial decreciente de la oscilación en un sistema oscilatorio de bajo amortiguamiento. FUNDAMENTO TEÓRICO A) SISTEMA SIN AMORTIGUAMIENTO Un movimiento armónico simple1 exento de rozamientos está regido por una ecuación del tipo siguiente: d 2z dt 2 + ω02 z = 0 (1) donde z representa la variable característica del movimiento (puede ser una longitud, un ángulo u otra magnitud física) y ω0 se denomina frecuencia angular del movimiento. La frecuencia angular se relaciona con el periodo (tiempo invertido en una oscilación completa) a través de la relación T0 = 2π/ω0, y la solución de la ecuación (1), la que describe la variación de la magnitud z con el tiempo, es de la forma: z (t ) = A cos(ω0t + δ ) (2) Véase que en esta ecuación existen DOS constantes arbitrarias, la primera es A (amplitud, valor máximo de la oscilación alrededor de una situación de equilibrio), y la segunda es δ, que nos indica la fase inicial, es decir, la separación de la posición de equilibrio en el instante inicial t = 0. Uno de los sistemas físicos más sencillos en los que puede estudiarse el movimiento armónico simple es el péndulo simple (o péndulo matemático), un punto material suspendido de un hilo inextensible y sin peso, que puede oscilar en torno a una posición de equilibrio. La distancia del punto pesado al punto de suspensión se denomina longitud del péndulo simple. Aunque un péndulo matemático no tiene existencia real, ya que los puntos materiales y los hilos sin masa son entes abstractos, en la práctica se 1 Se recomienda repasar la teoría del movimiento armónico simple. 1/6 Departamento de Física Aplicada Universidad de Castilla-La Mancha puede considerar como tal a un cuerpo de reducidas dimensiones suspendido de un hilo inextensible y de masa despreciable comparada con la del cuerpo. El péndulo simple describe un movimiento armónico simple en torno a su posición de equilibrio si sus oscilaciones son de amplitud suficientemente pequeña (en la práctica cuando la amplitud sea inferior a 15º), y la ecuación diferencial que describe dichas oscilaciones se puede escribir como: d 2θ dt 2 + g θ =0 L (3) donde θ designa al ángulo formado por el hilo con la vertical, L es la longitud de dicho hilo y g es la aceleración de la gravedad. El periodo del péndulo simple y su frecuencia angular están dados por: T= 2π ω02 = 2π L g (4) donde L representa la longitud medida desde el punto de suspensión hasta la masa puntual y g es la aceleración de la gravedad en el lugar donde se ha instalado el péndulo. Finalmente la ecuación que nos da el ángulo en función del tiempo es de la misma forma de la ecuación (2), siendo en este caso la variable dependiente θ(t). B) SISTEMA AMORTIGUADO Cuando el sistema oscilador que se considera está sometido a rozamientos, la descripción del movimiento resulta algo más complicada. Refiriéndonos en concreto al caso del péndulo simple, si se tiene en cuenta una fuerza de rozamiento proporcional a la velocidad (buena aproximación en muchos casos), la ecuación diferencial del movimiento es la siguiente: d 2θ dt 2 +γ dθ + ω02θ = 0 dt (5) donde γ es la constante de amortiguamiento y los demás símbolos tienen el significado que se señaló anteriormente. La solución de esta ecuación tiene la forma matemática de oscilaciones amortiguadas, es decir, oscilaciones en que la amplitud decrece con el tiempo. 2/6 Departamento de Física Aplicada Universidad de Castilla-La Mancha Sin entrar en la teoría de resolución de ecuaciones diferenciales, diremos que cuando el amortiguamiento es pequeño2, la variación temporal del ángulo θ con el tiempo, a la que dθ designaremos θ& θ& = puede escribirse como: dt θ& = dθ = Ae−γt / 2 cos(ωt + δ ) dt (6) Debido a la presencia del término exponencial, esta ecuación expresa que la amplitud se va reduciendo a medida que transcurre el tiempo; además, en ella aparece el término ω como frecuencia angular. El valor de ω es ω= ω 02 γ − 2 2 (7) Esto supone que la frecuencia angular del movimiento amortiguado es MENOR que la del movimiento con amortiguamiento nulo, o dicho alternativamente, que el periodo T del movimiento amortiguado crece respecto al del movimiento no amortiguado. * Significado físico de θ& Ya que θ& es la derivada temporal de un ángulo, su significado es la velocidad angular instantánea que tiene el péndulo en su movimiento alrededor del punto de suspensión. No debe confundirse este concepto con el de la frecuencia angular ω, aunque el símbolo ω usado aquí para esta ultima se emplea en otros contextos para representar a la velocidad angular. A partir de la ecuación (6) puede obtenerse si se desea el valor del ángulo como función del tiempo por integración. La obtención completa de la solución θ = θ(t) se presenta en la sección Apéndice, pero no es necesaria para las medidas que van a tomarse en esta práctica. 2 En este contexto, “pequeño” significa que ω0 >> 1 . γ 3/6 Departamento de Física Aplicada Universidad de Castilla-La Mancha MEDIDAS EXPERIMENTALES Se va a medir la velocidad angular máxima en sucesivas oscilaciones de un péndulo simple consistente en una pequeña bola de diámetro D colgada de un hilo de longitud L, sometido a un amortiguamiento débil, con objeto de verificar si a medida que transcurre el tiempo la variación de la velocidad angular es una exponencial decreciente. En primer lugar, obsérvese que a partir de la ecuación 6) puede afirmarse que la velocidad angular máxima en cada oscilación es: θ&max = Ae−γt / 2 (8) Cuando un péndulo oscila, la velocidad angular máxima ocurre en el momento en que pasa por la vertical. Nosotros mediremos experimentalmente esa velocidad angular máxima de modo indirecto, a través de la medida del tiempo de interrupción ti de un haz fotoeléctrico cuando la bola del péndulo pasa a través del mismo. (No debe confundirse nuestra medida experimental, ti, con el tiempo t en la ecuación (8), que empieza a contarse desde que el péndulo pasa por primera vez por la vertical). El montaje experimental se muestra en la figura al margen. La puerta 1 mide el tiempo de interrupción de la oscilación iésima, ti, el cual nos permite calcular la velocidad angular máxima durante esa oscilación (D es el diámetro de la bola y L la longitud del péndulo): ( ) D θ&max i = L ⋅ ti θ&max (9) La puerta 1 debe colocarse debajo de la bola cuando el hilo del péndulo esté vertical, para medir así la velocidad angular máxima. La puerta 2 se conecta en modo de impulsos, con el fin de contar el número de semioscilaciones (la bola del péndulo atraviesa dos vez la puerta 2 en cada oscilación, una a la ida y otra a la vuelta). 4/6 L Puerta 2 D Puerta 1 Departamento de Física Aplicada Universidad de Castilla-La Mancha PROCEDIMIENTO EXPERIMENTAL Se pone a oscilar el péndulo, asegurándose de que oscile en un plano (no debe oscilar como péndulo cónico). Primero se determina el periodo de oscilación usando un cronómetro y contando 20 oscilaciones. Después se realizan las medidas de tiempo de interrupción con el montaje de puertas fotoeléctricas. Una vez que se pone a cero la puerta 2, cada vez que el péndulo pasa a través de la puerta 1 queda registrado el tiempo de interrupción ti (en milisegundos). Debe tomarse el valor de tiempo de interrupción cada 10 semioscilaciones, para cada una de esas medidas hay que poner de nuevo a cero la puerta 1, pues su registro de tiempos es acumulativo. (Véase la sección EJEMPLO DE MEDIDAS) EJEMPLO DE MEDIDAS Puerta 2 ti (ms) semiosc. osc. (θ& ) (rad/s) t (s) 0,265 0,260 0,242 0,238 0,226 0,219 0,209 0,206 0,198 0,192 0,187 0,182 0,175 0,169 0,165 0,161 0,156 0,151 0,145 0 6,70 16,08 22,78 32,16 37,52 48,24 54,94 61,64 68,34 76,38 83,08 89,78 96,48 103,18 109,88 117,92 128,64 135,34 max i 1 6 13 18 25 29 37 42 47 52 58 63 68 73 78 83 89 97 102 53 54 58 59 62 64 67 68 71 73 75 77 80 83 85 87 90 93 97 0 5 12 17 24 28 36 41 46 51 57 62 67 72 77 82 88 96 101 0 2,5 6,0 8,5 12,0 14,0 18,0 20,5 23,0 25,5 28,5 31,0 33,5 36,0 38,5 41,0 44,0 48,0 50,5 Péndulo simple, longitud 1.79 m. Periodo de la oscilación 2.68 s. Diámetro de la bola del péndulo 25.1 mm. (La 1ª columna contiene la lectura de la puerta 2, igual a semioscilaciones+1) 5/6 Departamento de Física Aplicada Universidad de Castilla-La Mancha TRATAMIENTO DE DATOS 1. A partir de los tiempo de interrupción se calculan las velocidades angulares máximas de acuerdo con la ecuación (9) (en realidad se calcula el valor absoluto, ya que podemos tomar los datos en cualquiera de los dos sentidos de la oscilación). Véase 5ª columna en la tabla ejemplo. 2. Conociendo el periodo de oscilación del péndulo, se calcula el tiempo que corresponde a cada una de las oscilaciones medidas. Véase columna 6ª en la tabla ejemplo. 3. Se representa la velocidad angular máxima frente al tiempo, y se procede a ajustar los puntos experimentales a una curva exponencial de la forma dada por la ecuación (8). Si no se dispone de un programa de ajuste que realice directamente el trabajo, hágase una representación semilogarítmica. 0,30 0,28 0,26 θmax (rad/s) 0,24 0,22 . 0,20 0,18 0,16 0,14 0,12 0 20 40 60 80 100 120 140 t (s) Representación gráfica de la velocidad angular en función del tiempo(datos procedentes de tabla de medidas). No se presentan los parámetros del ajuste. 6/6 160