- Ninguna Categoria
Notas de Aulas - Universidade Federal do Paraná
Anuncio
Lições de Cálculo
de Várias Variáveis Reais
via Exemplos e Exercı́cios Resolvidos
Apenas o primeiro triângulo, da esquerda para a direita, tem sen x · sen y · sen z máximo.
José Renato Ramos Barbosa
UFPR - 2015
Universidade Federal do Paraná
Departamento de Matemática
Lições de Cálculo
de Várias Variáveis Reais
via Exemplos e Exercı́cios Resolvidos
Autor:
Professor José Renato Ramos Barbosa
Chefe do Departamento:
Professor Manuel Jesus Cruz Barreda
2015
www.ufpr.br/∼jrrb
2
Conteúdo
1 Introdução
5
1.1 Origem, Objetivos e Diretrizes das NA . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Cálculo de Funções Reais de Uma Variável Real . . . . . . . . . . . . . . . . . . 10
1.3 Fundamentos de Cálculo de Uma Variável . . . . . . . . . . . . . . . . . . . . . 31
2 Definições Básicas
2.1 Bola Aberta de Centro P0 ∈ Rn e Raio r > 0 . . . . . . .
2.1.1 Exemplos . . . . . . . . . . . . . . . . . . . . . .
2.1.2 Observação . . . . . . . . . . . . . . . . . . . . .
2.2 Conjunto Aberto - Ponto Interior . . . . . . . . . . . . .
2.2.1 Exemplos . . . . . . . . . . . . . . . . . . . . . .
2.3 Ponto de Fronteira . . . . . . . . . . . . . . . . . . . . .
2.3.1 Exemplos . . . . . . . . . . . . . . . . . . . . . .
2.4 Conjunto Compacto . . . . . . . . . . . . . . . . . . . .
2.4.1 Exemplos . . . . . . . . . . . . . . . . . . . . . .
2.5 Gráficos de Funções f Reais . . . . . . . . . . . . . . . .
2.5.1 Exemplos . . . . . . . . . . . . . . . . . . . . . .
2.5.2 Conjunto de Nı́vel . . . . . . . . . . . . . . . . . .
2.6 Traço (ou Trajetória) da Curva Parametrizada γ(t) . . .
2.6.1 Exemplos . . . . . . . . . . . . . . . . . . . . . .
2.6.2 Dinâmica de Uma Partı́cula Percorrendo o Traço
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Resultados - Cálculo Diferencial
3.1 Curvas Parametrizadas . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Limite da Função Vetorial γ(t) = (x(t), y(t), z(t)) em t = t0 . . .
3.1.2 Continuidade de γ(t) em t = t0 . . . . . . . . . . . . . . . . . . .
3.1.3 Derivada da Função Vetorial γ(t) = (x(t), y(t), z(t)) em t = t0 . .
3.1.4 Vetor Aceleração de γ(t) em t = t0 u.t. . . . . . . . . . . . . . . .
3.2 Continuidade e Diferenciabilidade . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Interpretação Geométrica da Continuidade para Funções Reais de
(Duas) Variável (Variáveis) Real (Reais) . . . . . . . . . . . . . .
3.2.2 Propriedades das Funções Contı́nuas . . . . . . . . . . . . . . . .
3.2.3 Derivação Parcial . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.4 (Vetor) Gradiente de f no Ponto P0 , isto é, ∇f(P0 ) . . . . . . . . .
3.2.5 Derivadas Parciais de Ordens Superiores para f(x, y) = cosx y − yx3
3.2.6 Diferenciabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.7 Regra da Cadeia . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.8 Exemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
Uma
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
43
47
47
47
48
48
48
48
48
48
49
49
50
53
53
54
55
55
55
55
55
57
59
59
59
60
60
61
62
65
65
4
CONTEÚDO
3.3
3.4
3.5
3.2.9 Consequências da Regra da Cadeia . . . . . . . . . . . . . .
Otimização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Pontos Crı́ticos; Máximos e Mı́nimos . . . . . . . . . . . . .
3.3.2 Teste da Derivada Segunda; Multiplicadores de Lagrange . .
Formulário - Cálculo Diferencial . . . . . . . . . . . . . . . . . . . .
Exercı́cios - Cálculo Diferencial . . . . . . . . . . . . . . . . . . . .
3.5.1 Curvas Parametrizadas . . . . . . . . . . . . . . . . . . . . .
3.5.2 Continuidade e Diferenciabilidade . . . . . . . . . . . . . . .
3.5.3 Planos Tangentes, Aproximações Lineares e Regra da Cadeia
3.5.4 Otimização . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
65
70
70
73
77
78
78
79
81
88
4 Resultados - Cálculo Integral
4.1 Integrais Duplas . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1 Regiões/Domı́nios de Integração Dxy . . . . . . . . . . . .
4.1.2 Área, Volume e Massa . . . . . . . . . . . . . . . . . . . .
4.1.3 Mudança de Variáveis nas Integrais Duplas . . . . . . . . .
4.1.4 Outros Exercı́cios . . . . . . . . . . . . . . . . . . . . . . .
4.2 Integrais Triplas . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Funções Contı́nuas f(x, y, z) sobre Regiões Dxyz do Tipo 1
4.2.2 Regiões dos Tipos 2 e 3 . . . . . . . . . . . . . . . . . . . .
4.2.3 Mudança de Variáveis nas Integrais Triplas . . . . . . . . .
4.2.4 Outros Exercı́cios . . . . . . . . . . . . . . . . . . . . . . .
4.3 Formulário - Cálculo Integral - Integrais Duplas . . . . . . . . . .
4.4 Formulário - Cálculo Integral - Integrais Triplas . . . . . . . . . .
4.5 Exercı́cios - Cálculo Integral . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
105
105
106
110
112
116
117
117
118
119
121
122
123
124
5 Resultados - Cálculo Vetorial
5.1 Integrais de Linha . . . . . . . . . . . . . . . . . . . . .
5.1.1 Definição das Integrais de Linha . . . . . . . . .
5.1.2 Teorema Fundamental do Cálculo para Integrais
5.2 Teorema de Green . . . . . . . . . . . . . . . . . . . .
5.2.1 Cálculo de Áreas via Integrais de Linha . . . . .
5.2.2 De Green para Stokes . . . . . . . . . . . . . . .
5.2.3 Outros Exercı́cios . . . . . . . . . . . . . . . . .
5.3 Formulário - Cálculo Vetorial . . . . . . . . . . . . . .
5.4 Exercı́cios - Cálculo Vetorial . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
147
147
148
153
154
155
156
158
159
160
. . . . . .
. . . . . .
de Linha
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
Capı́tulo 1
Introdução
“No problem can be solved from
the same level of consciousness
that created it.”
Albert Einstein
“Creativity is a leap in
consciousness that brings new
meaning or new context to any
situation or problem.”
Deepak Chopra
Inicio com o pedido de que este “Prefácio” seja lido e que alguns minutinhos sejam usados para
um bom entendimento da gênese e das metas destas Notas de Aula (NA).
1.1
Origem, Objetivos e Diretrizes das NA
Entre duas pessoas, existem três pontos de vista (ou versões) sobre um mesmo assunto, tema,
fato ou acontecimento: o (ou a) de uma delas, o (ou a) da outra e o (ou a) correto(a). O que
segue é uma visão pessoal de como deveria ser um primeiro curso, não só sobre Cálculo, mas
sobre qualquer assunto.
Bom, o primeiro ‘aviso aos navegantes’ é que tenho, aqui, a intenção de atingir um público
leitor mais voltado as aplicações e não aquele com inclinações mais teóricas. O público-alvo
consiste de estudantes, profissionais e interessados das áreas de Tecnologia (Engenharias Ambiental, Civil, de Bioprocessos e Biotecnologia, de Produção, Elétrica, Mecânica, Mecatrônica
e Quı́mica), das Ciências da Terra (Geografia, Geofı́sica, Geologia e Geomática) e afins (Engenharias Florestal e Industrial Madereira, por exemplo). Também são muitı́ssimo bem vindos,
colegas, alunos e ex-alunos de Estatı́stica, Fı́sica, Informática, Quı́mica e, especialmente, Matemática Industrial. Quanto aos que têm mais envolvimento com a Matemática Pura, que se
sentem mais inclinados para a abstração, preciso ressaltar que existe um grande número de
exercı́cios e aplicações neste, digamos, manual de Cálculo. (Note o uso a palavra ‘manual’ !)
Claro que o pessoal da Licenciatura e do Bacharelado em Matemática também é bem vindo.
Mas, definitivamente, existem ótimos livros onde podem ser obtidas construções axiomáticas
5
6
CAPÍTULO 1. INTRODUÇÃO
elaboradas e demonstrações engenhosas de teoremas fundamentais. Penso que o aprendizado
de qualquer assunto, não só da Matemática, é via ‘aproximação’. Estas NA tentam dar uma
perspectiva de primeira abordagem. Afinal, nos primeiros cursos de Cálculo, não é para se
aprender a calcular?
Entretanto, ainda que possa parecer contraditório, sugiro que o leitor interessado em seguir
estas NA, independente do primeiro curso de Cálculo (de Funções Reais) de uma Variável
(Real) que o mesmo tenha tido, parta para a leitura das mesmas já tendo estudado, em algum momento, limites, derivadas e integrais num contexto de rigor matemático (pelo menos)
moderado.1 Assim, por completeza, para revisão/aprofundamento e para contentar, primordialmente, os alunos oriundos da Matemática, a última parte desta introdução reproduz uma
lista de exercı́cios, sem resoluções mas com várias sugestões, que trabalhei com alunos de um
curso de Fundamentos de Cálculo de Uma Variável, por mim ministrado, há algum tempo atrás.
Tal lista visa a fundamentação do que já tenha sido estudado e, por isso mesmo, requer uma
busca rápida de demonstrações de alguns poucos resultados fundamentais. Saliento que o nı́vel
de rigor desta lista é diferente daquele adotado nos capı́tulos seguintes, como esclareço logo a
seguir.
Embora seja uma excelente oportunidade para formalizar o Cálculo de Uma Variável estudado
anteriormente, leitores com outras aptidões (ou outros gostos) devem desconsiderar tal lista de exercı́cios, sem perda de continuidade no conteúdo do restante destas
NA.
Para aqueles que não fundamentaram o conteúdo do Cálculo de Uma Variável Real, mas necessitam apenas ‘dar uma olhada’ mais informal no assunto, preparamos um material mais
‘light’ que antecede aquela lista super formal que, repito, deve ser dispensada por aqueles aversos ao rigor matemático.
O conteúdo dessas NA, que abrange um curso de Cálculo (de Funções Reais) de Várias Variáveis
(Reais),2 cujas primeiras versões remontam há mais de quinze anos, tem sido uma ‘obra em
construção’. É provável daı́ que a ordem e/ou a redação dos exercı́cios, bem como a quantidade
dos mesmos, tenham variado em muitas das visitas dos meus alunos (e demais interessados) ao
endereço
www.ufpr.br/∼jrrb,
que é minha página pessoal, mantida pela UFPR. Observação análoga vale para os as definições,
os resultados e os formulários destas NA. Entretanto, só recentemente concluı́ que tal material
está numa forma adequada para publicação.3
Muitos Professores de Cálculo de Várias Variáveis reclamam que o assunto (ali tratado) é muito
extenso. Daı́ o risco de não cumprir todo o programa de tal Disciplina é real. Para tentar
solucionar tal dificuldade, o objetivo aqui é mais operacional do que teórico. Isto significa que
a teoria foi submetida a uma ‘lipoaspiração’ e que a ênfase está quase toda na resolução de
exercı́cios e na interpretação geométrica e/ou fı́sica dos resultados. Assim, o que se perde em
precisão e rigor se ganha em concisão e tempo. Aqui, então, a teoria é mı́nima e a prática é
máxima.
Apenas para dar alguns exemplos de estilo:
1
Não existe, na verdade, qualquer contradição, já que o tal (provável) leitor já deve ter concluı́do o seu
primeiro curso de Cálculo, tendo assim estado disponı́vel para aprofundá-lo, durante ou depois da vigência do
mesmo!
2
Tal curso tem o código CM042 na UFPR.
3
Acrescento ainda que uma eventual errata será mantida no endereço eletrônico citado, a medida que forem
encontradas eventuais incorreções e incorporadas sugestões ou melhorias.
1.1. ORIGEM, OBJETIVOS E DIRETRIZES DAS NA
7
• Para uma melhor aceitação dos resultados, alguns exercı́cios são resolvidos de mais de
uma maneira. Tais resoluções extras utilizam, por exemplo, o Cálculo de Uma Variável
ou a Geometria Analı́tica;
• Vários resultados são estabelecidos, pelo menos quando exibidos pelo primeira vez, via
analogias e comparações com aqueles do Cálculo de Uma Variável;4
• Alguns resultados aparecem sem todas as hipóteses e quase todos os resultados são apresentados sem demonstrações (apenas alguns têm, não demonstrações, mas justificativas
razoáveis);
• Algumas definições não são apresentadas com a ênfase que mereceriam,5 embora sejam
utilizadas a exaustão, por entender que definições análogas, do Cálculo de Uma Variável,
são facilmente generalizadas ou que alguns conceitos são fisicamente e/ou geometricamente intuitivos. Por outro lado, a internet (via o Google, por exemplo) está aı́ para
suprir eventuais carências pontuais num tópico ou noutro;
• Em alguns resultados e algumas definições e resoluções de exercı́cios figuram sı́mbolos da
Lógica Matemática e outros. Por exemplo:
– ∴ , usado em conclusões como ‘Daı́’;
– ⇒ , usado quando uma afirmação que o antecede ‘implica’ uma afirmação que o
sucede;
– ⇔ , usado quando uma afirmação que o antecede ‘é equivalente a’ uma afirmação
que o sucede;
• Em alguns resultados e algumas definições e resoluções de exercı́cios o texto é escrito na
forma de uma lista de itens;
• Em alguns pontos em que mais formalização se faz necessária, faço alertas destacados
dentro de caixas. Por exemplo, passamos ao largo dos Limites e ao introduzirmos informalmente as Derivadas Parciais, o alerta de Limites é ativado. Depois, amarramos as
Derivadas Direcionais, daı́ as Parciais em particular, a um Limite via a Regra da Cadeia;
• Para que alguém perceba a obviedade de algo, costuma-se dizer, até com um pouco de
ironia, “Quer que eu desenhe (para você)?”. Assim, como “uma figura vale mais do que
mil palavras”, não economizei no uso de figuras e nas explicações das mesmas.6
4
Por exemplo, a “equação do plano tangente ao gráfico de f(x, y) num ponto” aparece, pela primeira vez,
como uma extensão da equação da reta tangente ao gráfico de f(x) num ponto. Outro exemplo: A Regra da
Cadeia para funções de várias variáveis é apresentada como uma generalização da mesma para funções de uma
variável. Um último exemplo: A Mudança de Variáveis para Integrais Duplas é dada como uma generalização
natural da integração por substituição do Cálculo de Uma Variável.
5
Por exemplo, Máximos e Mı́nimos no estudo de Otimização e Orientação de Curvas no estudo de Integrais
de Linha e Teorema de Green.
6
Tais figuras têm sido geradas ao longo do tempo e de maneiras distintas, de acordo com a temporalidade
delas. Algumas foram plotadas utilizando-se o octave e o gnuplot, que são programas desenvolvidos pelo
projeto GNU/Linux de ‘software’ livre. Outras foram geradas no xfig, um editor gráfico ‘open source’, e depois
modificadas nos arquivos de extensão ‘.pstex t’ para terem letras no formato do texto corrente, escrito em Latex,
este outro um programa de editoração e plotagem cientı́fica bastante utilizado nos meios cientı́fico e acadêmico.
Mais recentemente, inclusive, venho gerando/plotando as figuras diretamente nas linhas de comando dos arquivos
‘.tex’. Em particular, tenho utilizado o pacote tikz. Com este, além de estar produzindo novas figuras, mais
8
CAPÍTULO 1. INTRODUÇÃO
No formulário do terceiro capı́tulo, vários itens são escritos num contexto mais geral, extendendo
resultados de duas e três variáveis ou coordenadas para o caso de um número qualquer de
variáveis ou coordenadas. Ali, o aluno deverá ter o conhecimento, por exemplo, da notação de
somatório.
Por ser ainda incipiente, apenas o último capı́tulo, que trata do Cálculo Vetorial, ainda não tem
um número grande de exercı́cios. Numa próxima versão, pretendo acrescentar mais exercı́cios,
bem como o Teorema de Gauss e um maior aprofundamento do Teorema de Stokes, a estas
NA. Tais teoremas, juntamente com o Teorema de Green (que consta da versão atual), são o
cerne do Cálculo Vetorial.
É conveniente ressaltar que quase todos os exercı́cios aqui propostos são resolvidos logo quando
são apresentados ou nas seções dedicadas aos mesmos. Assim, nos raros momentos em que
não forem apresentados exemplos que corroborem algum resultado, logo após o mesmo ter
sido estabelecido, mas apenas constem enunciados de alguns exercı́cios, estejam certos de que
as resoluções dos mesmos serão apresentadas na seção de exercı́cios do capı́tulo que contiver
aquele resultado.
Observamos ainda que os pré-requisitos para a leitura destass NA são: um curso de PréCálculo (Matemática do Ensino Médio), um curso de Cálculo de Uma Variável, obviamente, e
um curso de Geometria Análitica.7 Falando em pré-requisitos, gostaria de expressar que vejo a
Matemática como uma linguagem tipo Português, Inglês, Francês, etc. Assim, temos também
‘Matematiquês’, ‘Fisiquês’, ‘Quimiquês’, ‘Informatiquês’, etc. Aprender uma Lı́ngua é antes,
praticamente, ser alfabetizado nela. Já nessa etapa preliminar é preciso estudá-la e praticá-la
(para não cometer equı́vocos com a mesma). Por um lado, note que não é fácil querer fazer um
estudo avançado da Lı́ngua sem ter sido alfabetizado nela. Como diz o ditado: ‘O avançado
é fazer o básico bem feito!’. Por outro lado, para se ter fluência na Lı́ngua é preciso, além do
estudo e da prática, conhecer todo um jargão da área. Apenas estudar na proximidade de cada
prova é perda de tempo para quase todos aqueles que assim procedem.
Demonstrações dos resultados destas NA, bem como exercı́cios e exemplos similares e mais
avançados, podem ser encontrados, por exemplo, nos livros:
• CÁLCULO DIFERENCIAL E INTEGRAL, VOLUME 2, Paulo Boulos e Zara Issa Abud,
Makron Books, Edicão Revista e Ampliada, 2006;
• CÁLCULO DE FUNÇÕES DE MÚLTIPLAS VARIÁVEIS, Geraldo Ávila, LTC, Sétima
Edição, 2006;
• CÁLCULO VECTORIAL, Jerrold Marsden e Anthony Tromba, Pearson/Addison Wesley,
Quinta Edição (em Espanhol), 2004;
• FOUNDATIONS OF ANALYSIS, David Belding e Kevin Mitchell, Dover, Segunda Edição
(em Inglês), 2008.
Eventuais sugestões para o aprimoramento e/ou a clareza e/ou a correção das NA serão muito
bem vindas. Nesse contexto, desde já, agradeço aos colegas Ademir Alves Ribeiro, José Carlos
claras e limpas, tenho trocado as figuras antigas geradas pelos outros meios citados aqui. Gerei uma única
figura (para ser a capa das NA e também a figura 3.6) usando o GeoGebra, um pacote gráfico desenvolvido pelo
International GeoGebra Institute, e uma única figura usando o Grapher (para ser a última figura das NA), um
pacote gráfico da Apple que vem com o ‘Mac’. Para concluir esse ‘registro histórico’ das figuras aqui produzidas,
espero que, no todo, o resultado final tenha sido, além de satisfatório, também agradável aos olhos.
7
Por exemplo, é fundamental ter conhecimento de como se calcula distância de ponto a reta (ou a plano)
e que as fórmulas cos ′ x = −sen x e sen ′ x = cos x são válidas apenas para x expresso em radianos. Para x
π
do lado direito da igualdade.
expresso em graus, cada uma destas fórmulas recebe o fator 180
1.1. ORIGEM, OBJETIVOS E DIRETRIZES DAS NA
9
Cifuentes Vasquez e Marcelo Muniz Silva Alves, como também aos ex-alunos Diego Wedermann
Sanchez, Trenton Roncato Juraszek, Nicolas Eugênio Martins Martinhão e Eusébio Labadie
Neto.
Para concluir, dedico estas NA aos meus Pais, Amândio e Conça, e aos meus Filhos, Theo
e Ani.
10
CAPÍTULO 1. INTRODUÇÃO
1.2
Cálculo de Funções Reais de Uma Variável Real
Para a parte de Cálculo de uma Função Real de Uma Variável Real (isto é, Limites, Derivadas
e Integrais destas), a referência, digamos, mais “light”, é o livro
cálculo em quadrinhos;
autor: larry gonick;
editora: edgard blücher;
2014.
Para começar, adotamos a seguinte abordagem intuitiva para tais Limites:
• Como sabemos, não é possı́vel calcular f(x) caso x não esteja no domı́nio de f. Por
exemplo, considere
x2 − 1
f(x) =
e x = 1.
x−1
Assim, por um lado, temos a indeterminação
1−1
12 − 1
=
1−1
1−1
0
= .
0
Por outro lado,
x2 − 1 = (x + 1)(x − 1).
Podemos daı́ definir
f(x) =
x + 1 se x 6= 1;
indefinido se x = 1.
y
y = f(x)
2
1
x
Note que f(x) pode ser calculado ‘arbitrariamente próximo’ de 2 para x ‘arbitrariamente
próximo’ de 1, isto é, como o módulo da diferença entre dois números mede a distância
entre eles, temos que
|f(x) − 2|
pode ser calculado ‘tão pequeno quanto se queira’ para
|x − 1|
‘suficientemente pequeno’.
Por exemplo, considere que x representa as seguintes aproximações, tanto à esquerda
quanto à direita, de 1:
1.2. CÁLCULO DE FUNÇÕES REAIS DE UMA VARIÁVEL REAL
x
0, 900000
0, 990000
0, 999000
0, 999900
0, 999990
0, 999999
f(x)
1.900000
1, 990000
1, 999000
1, 999900
1, 999990
1, 999999
x
1, 100000
1, 010000
1, 001000
1, 000100
1, 000010
1, 000001
f(x)
2, 100000
2, 010000
2, 001000
2, 000100
2, 000010
2, 000001
|x − 1|
0, 100000
0, 010000
0, 001000
0, 000100
0, 000010
0, 000001
11
|f(x) − 2|
0, 100000
0, 010000
0, 001000
0, 000100
0, 000010
0, 000001
Pergunta: Dado um número ε > 0 ‘arbitrariamente pequeno’, digamos
0 < ε ≤ 0, 00 . . . 01
com um número arbitrário de casas decimais, é possı́vel considerar |x − 1| suficientemente
pequeno, mas ainda não nulo, tal que seja possı́vel calcular f(x) a uma distância de 2
menor que ε, isto é, tal que |f(x) − 2| < ε?
Resposta: Sim! Basta considerar x 6= 1 com distância a 1 menor que um número δ que
não exceda ε.
De fato, seja 0 < |x − 1| < δ com δ ≤ ε. Daı́
|f(x) − 2| = |x + 1 − 2|
= |x − 1|
<δ
≤ ε.
(Por exemplo, seja ε = 0, 0000000010. Considere então δ = 0, 0000000005 e |x − 1| < δ.
Daı́
|f(x) − 2| = |x + 1 − 2|
= |x − 1|
< 0, 0000000005
< 0, 0000000010.
Então |f(x) − 2| < ε.)
Isto é, não importa quão pequeno seja ε, sempre podemos obter alguma entrada x (com
|x − 1| > 0 suficientemente pequeno) tal que seja possı́vel calcular a saı́da f(x) com
distância |f(x) − 2| inferior a qualquer número ε inicialmente considerado.
Neste caso dizemos que o limite de f(x) é 2 quando x se aproxima de 1 e denotamos
lim f(x) = 2.
x→1
(De modo análogo, no livro do gonick, verifica-se que
t2 − 3
D(t) =
t−3
é tal que
lim D(t) = 6,
t→3
isto é, o limite de D(t) é 6 quando t se aproxima de 3.)
12
CAPÍTULO 1. INTRODUÇÃO
• Para uma função f(x) arbitrária que esteja definida num intervalo aberto que contenha o
número a, mas não necessariamente no próprio a, a expressão
lim f(x) = L
x→a
significa que, independente de quão pequeno seja o intervalo
(L − ε, L + ε),
L+ε
L
L−ε
podemos obter outro intervalo
(a − δ, a + δ)
L+ε
L
L−ε
a+δ
a
a−δ
suficientemente pequeno tal que
a 6= x ∈ (a − δ, a + δ) =⇒ f(x) ∈ (L − ε, L + ε),
L+ε
a+δ
x
a
L
f(x)
L−ε
a−δ
isto é,8
0 < |x − a| < δ =⇒ |f(x) − L| < ε.
8
Dizer que o módulo da diferença de dois números é menor do que um dado r > 0 significa que um dos dois
tais números pertence ao intervalo aberto de centro no outro e raio r. No antecedente da implicação anterior,
por exemplo, os dois números são x e a enquanto que r = δ. No consequente, os dois números são f(x) e L
enquanto que r = ε.
1.2. CÁLCULO DE FUNÇÕES REAIS DE UMA VARIÁVEL REAL
13
A interpretação geométrica disso é que podemos obter um cı́rculo tão pequeno quanto se
queira de centro no ponto
(a, L)
tal que o gráfico da função neste cı́rculo se aproxima de tal ponto com, no máximo, uma
única interrupção: o próprio (a, L)!9
• Chamamos de funções elementares as funções constantes, a função módulo, bem como as
funções potências, as funções exponenciais, as funções trigonométricas e as suas respectivas inversas. Pois bem, pode ser demonstrado que, se f(x) é uma função elementar e a é
um ponto de seu domı́nio, então
lim f(x) = f(a).
x→a
Por exemplo:
√
√
lim 5 = 5,
x→a
lim x2 = (−2)2 ,
x→−2
lim
t→3−1
1
1
= −1
x
3
e
lim cos θ = cos π.
θ→π
(Os três últimos limites são iguais a 4, 3 e −1, respectivamente.)
Pode também ser demonstrado que o limite da soma e o limite do produto de funções
são a soma e o produto dos limites de tais funções, respectivamente, desde que existam
tais limites, e que o limite do quociente de duas funções é o quociente dos limites destas
funções caso existam tais limites e o limite do denominador não seja nulo.10
Por exemplo:
x
1
ex cos(x)
1
ea cos a
a
4
4
+
+
+
lim 3x + +
=
3a
+
x→a
2 (x − 1)2
x
2 (a − 1)2
a
para cada cada real a diferente de 0 e 1.
• Além das propriedades de limites já citadas, temos ainda muitas outras. Por exemplo,
aquela conhecida como Teorema do Sanduı́che:
Se as funções f(x), g(x) e h(x) estão definidas num intervalo aberto de centro a,
g(x) ≤ f(x) ≤ h(x)
para cada x deste intervalo e
lim g(x) = L = lim h(x),
x→a
x→a
então
lim f(x) = L.
x→a
Segue de tal teorema, por exemplo, que
sen θ
= 1.11
θ→0
θ
lim
(Temos uma ‘explicação’ geométrica para tal limite: ao considerarmos θ cada vez menor,
os comprimentos de sen θ e do arco θ (no cı́rculo trigonométrico unitário) vão ficando
praticamente indistinguı́veis!)
9
Confira o livro do gonick para uma ilustração.
Confira o livro do gonick!
11
Confira o gonick!
10
14
CAPÍTULO 1. INTRODUÇÃO
• limites infinitos e no infinito:
O infinito ∞ não se define: é um conceito abstrato como belo(a), feio(a), estranho(a),
etc.12 Na Matemática é usado para representar uma grandeza que pode assumir valores
‘tão grandes quanto se queira’. Neste caso, denotamos
grandeza → ∞.
Por exemplo, o que acontece com a função f(x) =
tão grandes ou tão pequenos quanto se queira?
Por um lado, a tabela
x
f(x)
−10
−0.1
−100
−0, 01
−1000
−0, 001
−10.000 −0, 0001
..
..
.
.
1
x
quando x assume valores (em módulo)
x
f(x)
10
0.1
100
0, 01
1000
0, 001
10.000 0, 0001
..
..
.
.
nos diz que f(x) vai ficando tão pequeno quanto se queira (em módulo) a medida que x
vai crescendo (em módulo). Neste caso, denotamos
lim f(x) = 0−
x→−∞
e
lim f(x) = 0+ .
x→+∞
Por outro lado, a tabela
x
f(x)
−0.1
−10
−0, 01
−100
−0, 001
−1000
−0, 0001 −10.000
..
..
.
.
x
f(x)
0.1
10
0.01
100
0, 001
1000
0, 0001 10.000
..
..
.
.
nos diz que f(x) vai ficando tão grande quanto se queira (em módulo) a medida que x vai
decrescendo (em módulo). Neste caso, denotamos
lim f(x) = −∞ e
x→0−
lim f(x) = +∞.
x→0+
Daı́ o conhecido gráfico
y
x
12
∞ não é, por exemplo, um 8 que tropeçou e caiu de lado!
1.2. CÁLCULO DE FUNÇÕES REAIS DE UMA VARIÁVEL REAL
15
para tal função potência.13
Outro exemplo: f(x) = ex . Neste caso
lim f(x) = 0 e
x→−∞
Daı́ o conhecido gráfico
lim f(x) = ∞.
x→∞
y
x
para tal função exponencial.
Embora tais exemplos de funções elementares sejam ilustrativos do comportamento de
grandezas no infinito, a dificuldade de lidar com o mesmo ocorre noutros exemplos, digamos, mais sutis. Por exemplo, quando temos de analisar funções racionais, que são
divisões de polinômios.14 Outro exemplo: O teorema do sanduı́che enunciado anteriormente ainda é válido caso a seja trocado por ∞. Daı́, como
−
sen x
1
1
≤
≤
x
x
x
para x positivo e
lim
x→∞
1
= 0,
x
segue que
sen x
= 0.
x→∞
x
lim
Agora, vamos prosseguir para as Derivadas das Funções Reais de Uma Variável Real:
• derivada: um tipo de limite que mede inclinação de reta tangente:
Suponha ser possı́vel obter a (reta) tangente ao gráfico de uma função f(x) no ponto
(x0 , f (x0 )) de tal gráfico. Seja y = ax + b a equação linear de tal reta. (Confira a
ilustração seguinte.)
13
Para valores positivos, é tradicional denotarmos apenas por:
lim f(x) = 0 e
x→∞
14
Confira o gonick!
lim f(x) = ∞.
x→0
16
CAPÍTULO 1. INTRODUÇÃO
f(x)
f (x0 + h)
y = ax + b
f (x0 + h) − f (x0 )
f (x0 )
h
x0
x0 + h
x
Daı́, como (x0 , f (x0 )) é um ponto de tal tangente, temos
b = f (x0 ) − ax0 .
Por outro lado, como obter a inclinação a desta (reta) tangente?
Primeiramente, denotemos
a := f ′ (x0 ) .
Seja agora
(x0 + h, f (x0 + h))
um outro ponto do gráfico de f(x) com |h| suficientemente pequeno mas não nulo.15 Assim,
a inclinação da (reta) secante que passa por tal ponto e pelo ponto (x0 , f (x0 )) é dada por
f (x0 + h) − f (x0 )
.
h
(Este quociente é denominado de quociente de Newton.)
Note que, se |h| se aproxima arbitrariamente de 0, estes dois pontos do gráfico de f(x)
ficam arbitrariamente próximos um do outro e a secante considerada fica ‘arbitrariamente
próxima’ da tangente considerada.
15
Aqui, embora a figura anterior não ilustre, procedemos o nosso estudo nas ‘proximidades’ de x0 , tanto para
pontos à esquerda esquerda de x0 , isto é, para h < 0, quanto para pontos à direita de x0 , isto é, para h > 0.
1.2. CÁLCULO DE FUNÇÕES REAIS DE UMA VARIÁVEL REAL
17
(Daı́, o quociente de Newton fica arbitrariamente próximo de f ′ (x0 ).)
Define-se então
f (x0 + h) − f (x0 )
h→0
h
f ′ (x0 ) := lim
caso exista tal limite. Agora, independente da existência deste limite estar associada a
uma interpretação geométrica para a inclinação a, diremos ainda que f(x) é diferenciável
em x = x0 ou que f ′ (x0 ) é a derivada de f(x) em x = x0 .
Para fixar conceitos, considere, por exemplo, f(x) = x2 e x0 = 1 na discussão anterior.
(Confira a ilustração seguinte.)
f(x)
f(1 + h)
y = f ′ (1)x + b
f(1 + h) − f(1)
f(1)
h
1
1+h
x
A inclinação da tangente ao gráfico de tal parábola em (1, f(1)) é obtida via a derivada
de f(x) = x2 em x = 1 e calculada por
f(1 + h) − f(1)
h→0
h
(1 + h)2 − 12
= lim
h→0
h
1 + 2h + h2 − 1
= lim
h→0
h
= lim (2 + h)
f ′ (1) = lim
h→0
= 2.
18
CAPÍTULO 1. INTRODUÇÃO
Segue daı́ que o coeficiente angular de tal tangente é calculado por
b = f(1) − f ′ (1) · 1
=1−2·1
= −1
e, então, a equação desta tangente é dada por y = 2x − 1.
(No exemplo anterior, se x = x0 é arbitrário, note que f ′ (x0 ) = 2x0 .)
Para f(x) arbitrária, temos a função derivada
f(x + h) − f(x)
,
h→0
h
f ′ (x) := lim
definida onde tal limite existir.
Por exemplo,
f(x) = x2
e f ′ (x) = 2x
estão definidas para cada x ∈ R. Outro exemplo:
f(x) = x3
e f ′ (x) = 3x2
estão definidas para cada x ∈ R. De fato:
f(x + h) − f(x)
f ′ (x) = lim
h→0
h
(x + h)3 − x3
= lim
h→0
h
3
x + 3x2 h + 3xh2 + h3 − x3
= lim
h→0
h 2
= lim 3x + 3xh + h2
h→0
2
= 3x .
Na verdade, para cada inteiro positivo n fixo, demonstra-se que
f(x) = xn
e f ′ (x) = nxn−1
para cada x ∈ R.16
Agora, a derivada de uma função constante é zero. De fato, seja f(x) = c com c constante.
Segue daı́ que
f(x + h) − f(x)
f ′ (x) = lim
h→0
h
c−c
= lim
h→0
h
0
= lim
h→0 h
= lim 0
h→0
= 0.
Ainda, como a derivada da soma de funções é a soma das derivadas destas funções e
a derivada do produto de uma constante por uma função é o produto de tal constante
por tal função,17 é fácil calcular a derivada de um polinômio. Por exemplo, se f(x) =
16
17
Confira o gonick!
Idem!
1.2. CÁLCULO DE FUNÇÕES REAIS DE UMA VARIÁVEL REAL
19
3x4 − x3 + 4x2 + x + 2, então
f ′ (x) = 3(4x3 ) + (−1)(3x2 ) + 4(2x) + 1 + 0
= 12x3 − 3x2 + 8x + 1
para cada x ∈ R.
(A derivada de y = f(x) pode ser denotada das formas:
dy
dx
df
=
dx
d
(f(x)).
=
dx
f ′ (x) =
Por exemplo, se c é uma constante,
d
dx
x2 + c = 2x.)
Além das regras anteriores, existem outras importantes como, por exemplo, as regras das
derivadas do produto e do quociente de funções, bem como a regra da cadeia que calcula a
derivada de funções compostas.18 Ainda, onde as respectivas funções estiverem definidas,
demonstra-se que:19
d
(sen x) = cos x,
dx
d
(cos x) = −sen x,
dx
d x
(e ) = ex ,
dx
d
1
d
(tan x) = sec2 x,
(ln x) = ,
dx
dx
x
d
d
1
1
,
(arcsen x) = √
(arctan x) =
2
dx
dx
1 + x2
1−x
d r
(x ) = rxr−1
dx
e
com r ∈ R fixo.
• derivada mede taxa de variação instantânea:
A derivada dy
pode ser interpretada como a taxa de variação instantânea de uma grandeza,
dx
y, em relação a outra, x. Em outras palavras, quão rapidamente y varia em função de x.
Para exemplificar, vamos denotar a função f(x) = x2 por
s(t) = t2 ,
que aqui representa a posição de uma partı́cula no instante de tempo t u.t..20 Considere
que queremos saber a velocidade de tal partı́cula no instante t u.t., isto é, queremos
18
Idem!
Idem!
20
Por exemplo, desconsiderando as dimensões, uma bola de boliche lisa descendo, sem atrito, um plano
inclinado com inclinação adequada, varia a sua posição (no tempo) aproximadamente via tal s(t).
19
20
CAPÍTULO 1. INTRODUÇÃO
saber quão rapidamente a posição varia em relação ao tempo. Neste caso, a velocidade é
calculada pela derivada
ds
s ′ (t) =
dt
′
no instante t u.t.. Assim s (t) = 2t u.v. é a medida de tal velocidade instantânea. Por
exemplo, caso a posição seja medida em metros e o tempo em segundos, passados t = 10
segundos, a partı́cula fica sujeita a uma velocidade (neste instante) de s ′ (t) = 20 m/s.21
• otimização (maximização-minimização):
Um ponto α de máximo (respectivamente, de mı́nimo) local de uma função f(x), pertence
ao domı́nio da mesma e tem a maior (respectivamente, menor) imagem por f(x), quando
comparada com as de pontos arbitrariamente próximos a α. Neste caso, tal α é dito um
extremo local de f(x).
(Um ponto do gráfico de uma função cuja abcissa é um ponto de máximo local representa
o ‘cume de uma montanha’, enquanto aquele cuja abcissa é um ponto de mı́nimo local
representa o ‘fundo de um vale’.)
Por exemplo, na figura 1.1, considere que Pi = (xi , f (xi )) pertence ao gráfico de uma
função f(x), i = 0, . . . , 6. As abcissas de tais pontos são extremos locais de f(x).
Como este exemplo ilustra, em extremos locais similares a xi , i = 1, 2, 3, 4, 5, a função
muda de crescente para decrescente ou de decrescente para crescente.
Um ponto interior ao domı́nio de uma função pertence a algum intervalo aberto, por
menor que seja tal intervalo, inteiramente contido no domı́nio de tal função.
Por exemplo, na figura 1.1, apenas x0 e x6 não são interiores ao domı́nio de f(x).
Demonstra-se que:
Se f(x) tem extremo local num ponto α interior ao seu
domı́nio e tem derivada f ′ (α) nesse ponto, então tal
ponto é crı́tico, isto é, f ′ (α) = 0.22
Por exemplo, na figura 1.1, embora as abcissas de ı́ndices pares sejam pontos de máximo
locais e as de ı́ndices ı́mpares sejam pontos de mı́nimo locais, apenas x1 , x2 e x5 são
interiores ao domı́nio de f(x) e existe f ′ (x) em cada um destes pontos. Note que, f ′ (xi ) = 0
para i = 1, 2, 5.
P6
P0
P4
P2
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
P3
P1
Figura 1.1: O que ocorre em x0 , x3 , x4 e x6 ?
21
Confira o gonick para mais exemplos.
P5
1.2. CÁLCULO DE FUNÇÕES REAIS DE UMA VARIÁVEL REAL
21
Contudo, a recı́proca da proposição anterior não é verdadeira: Para f(x) = x3 , por
exemplo, x = 0 é um ponto interior com f ′ (0) = 3 · 02 = 0, mas não é extremo local. Um
ponto como este é dito um ponto de sela.
f(x) = x3
x
0
Isto significa que os candidatos a extremos locais interiores ao domı́nio de uma função
são aqueles nos quais a derivada de tal função seja nula. Mas derivada nula num ponto
interior não é garantia para tal ponto ser um extremo local!
A próxima proposição é conhecida como o
teste da derivada de segunda ordem.
Antes de enunciá-la, o que é uma derivada de segunda ordem?
Suponha que é possı́vel derivar a derivada de y = f(x), isto é, podemos obter a derivada
de
dy
f ′ (x) =
,
dx
isto é, existe a derivada
d dy
′ ′
(f ) (x) =
.
dx dx
Neste caso, tal derivada é dita a derivada de segunda ordem de y = f(x) e é denotada por
f ′′ (x) =
d2 y
.
dx2
Por exemplo, se s(t) = t2 u.p. é a posição de uma partı́cula no instante t u.t., já vimos
que ds
= 2t u.v. é a sua velocidade no mesmo instante. Aqui,
dt
d2 s
u.a.
dt2
é a aceleração de tal partı́cula em tal instante.
Demonstra-se que:
Seja α um ponto interior de algum intervalo onde f(x)
esteja definida e seja diferenciável. Se f ′ (α) = 0, então
a tabela seguinte é válida:
f ′′ (α)
α
> 0 mı́nimo local de f(x);
< 0 máximo local de f(x).
(Neste teste, está implı́cita a existência da derivada de segunda ordem!)
22
CAPÍTULO 1. INTRODUÇÃO
Por exemplo, 0 é ponto crı́tico de f(x) = x2 (que é diferenciável em cada x ∈ R) e interior
ao domı́nio de tal função. (De fato, f ′ (x) = 2x acarreta f ′ (0) = 0 e R é o domı́nio comum
de f(x) e f ′ (x).) Por outro lado, f ′′ (0) > 0. (De fato, f ′′ (x) = 2 para cada x ∈ R.) Assim,
0 é ponto de mı́nimo (global) de f(x).
f(x) = x2
0
x
Um raciocı́nio análogo nos mostra que 0 é ponto de máximo de f(x) = −x2 .
0
x
f(x) = −x2
E quanto a concavidade do gráfico de uma função f(x) a medida que x varia?
Considere a inclinação f ′ (x) da tangente a tal gráfico no ponto x, f(x) . Neste caso, o
que acontece a medida que x cresce?
(Veja, por exemplo, as funções cúbica e quadráticas dos últimos três exemplos.)
Por um lado, se x cresce e f ′ (x) cresce com x, note que o gráfico de f(x) tem concavidade
para cima. Isto ocorre precisamente onde a taxa de variação da derivada (em relação a
x), isto é, (f ′ ) ′ (x) = f ′′ (x), é positiva. Por outro lado, se f ′ (x) decresce a medida que x
cresce, tal gráfico tem concavidade para baixo. Isto ocorre onde f ′′ (x) < 0.
A abcissa de um ponto do gráfico de uma função onde a sua concavidade para cima
(respectivamente, baixo) muda para baixo (respectivamente, cima) é dito um ponto de
inflexão.
(0 é ponto de inflexão para a função cúbica anterior.)
Em tal ponto, a derivada de segunda ordem é zero.23
E quanto ao esboço do gráfico de uma função f(x) arbitrária?
Para esboçar retas, basta obter os pontos onde tais retas interceptam os eixos coordenados.
Caso o gráfico não seja uma reta, tais interseções, se existirem, são insuficientes para
esboçar o mesmo. Neste caso, o roteiro é o seguinte:
I. Caso existam, obtenha as interseções do gráfico com os eixos coordenados, isto é,
determine:
23
Confira o gonick!
1.2. CÁLCULO DE FUNÇÕES REAIS DE UMA VARIÁVEL REAL
23
f(x) para x = 0; x para f(x) = 0.
Marque tais pontos nos eixos coordenados.
II. Caso existam, determine os pontos crı́ticos da função, isto é, obtenha x para f ′ (x) = 0.
(Lembre-se que tais pontos são os possı́veis extremos locais!)
Para cada ponto crı́tico α obtido, marque o ponto α, f(α) pertencente ao gráfico
de f(x).
III. Para cada ponto crı́tico obtido, use o teste da derivada de segunda ordem.
(Daı́ saberemos o tipo de extremo que temos!)
IV. Caso existam, obtenha os pontos de inflexão. Para cada ponto de inflexão β obtido,
marque o ponto β, f(β) pertencente ao gráfico de f(x).
V. Estude a concavidade: onde é para cima ou para baixo.
VI. Estude o comportamento do gráfico no infinito via
lim f(x).
x→±∞
Agora, reunindo todas as informações anteriores, esboce o gráfico de f(x).
Por exemplo, seja f(x) = x3 − 6x2 + 11x − 6.
(Daı́ f ′ (x) = 3x2 − 12x + 11 e f ′′ (x) = 6x − 12.)
I. Para a interseção com o eixo das ordenadas, seja x = 0. Então f(x) = −6 e (0, −6)
pertence ao gráfico de f(x). Para a interseção com o eixo das abcissas, seja f(x) = 0.
Daı́, como as raı́zes de x3 − 6x2 + 11x − 6 = 0 são x = 1, 2, 3, temos que (1, 0), (2, 0)
e (3, 0) pertencem ao gráfico de f(x).
f(x)
1 2 3
x
−6
II. Se f ′ (x) = 0, como 3x2 − 12x + 11 = 0, temos que
√
6∓ 3
1, 42 = α1 ;
≈
x=
2, 58 = α2 .
3
Então, calculando as imagens, temos que
f (α1 ) ≈ 0, 39 e f (α2 ) ≈ −0, 39.
24
CAPÍTULO 1. INTRODUÇÃO
f(x)
α1 , f (α1 )
x
α2 , f (α2 )
(Tal figura nos indica que α1 e α2 são pontos de máximo e mı́nimo locais, respectivamente. O teste do item seguinte serve apenas como confirmação analı́tica deste
fato!)
III. Como f ′′ (α1 ) = 6α1 − 12 < 0 e f ′′ (α2 ) = 6α2 − 12 > 0, temos que, de fato, α1 e α2
são pontos de máximo e mı́nimo locais, respectivamente.
IV. f ′′ (x) = 0 é equivalente a 6x − 12 = 0, isto é, x = 2, que é o ponto de inflexão e
cuja imagem por f(x) é dada por f(2) = 0. (O ponto (2, f(2)) = (2, 0) já havia sido
marcado nas figuras anteriores.)
V. Concavidade para baixo em (−∞, 2) (pois f ′′ (x) < 0 em tal intervalo) e para cima
em (2, ∞) (pois f ′′ (x) > 0 em tal intervalo).
VI. Como f(x) é um polinômio de grau ı́mpar cujo coeficiente do termo que determina
tal grau é 1, pode ser verificado que
lim f(x) = −∞ e
x→−∞
lim f(x) = ∞.
x→∞
Coletando agora todas as informações anteriores, temos o seguinte gráfico para f(x):
f(x)
x
1.2. CÁLCULO DE FUNÇÕES REAIS DE UMA VARIÁVEL REAL
25
Vamos agora usar tais idéias para resolver um problema de otimização mais aplicado.
Considere que queremos construir um cercado retangular utilizando a parede de um celeiro
como um dos lados. Suponha que temos 80 metros de táboas de madeira em pedaços
cortados iguais, um a um. Pergunta-se:
Qual a maior área que pode ser delimitada por tal cercado?
parede do celeiro
A(x) = x(80 − 2x)
x
x
80 − 2x
Assim, queremos obter o máximo da área
A(x) = −2x2 + 80x
para x > 0 e 80 − 2x > 0, isto é, 0 < x < 40. Logo, por um lado, como A ′ (x) = −4x + 80,
A ′ (x) = 0 nos fornece x = 20 metros como ponto crı́tico. Por outro lado, para garantir
que tal ponto crı́tico é ponto de máximo, usaremos o teste da derivada de segunda ordem.
De fato, isto segue de A ′′ (x) = −4 < 0 (e, em particular, para x = 20). Daı́, a área
máxima é dada por A(20) = 800 metros quadrados.24
Por último, vamos para as Integrais das Funções Reais de Uma Variável Real:
• integração:
Assim como a Subtração e a Divisão, quando possı́veis, são as operações inversas da
Adição e da Multiplicação, respectivamente, a Integração, quando possı́vel, é a operação
inversa da Derivação. Isto posto, sejam F(x) e f(x) funções obtidas, uma da outra, como
resultados destas duas últimas operações. A equivalência
d
dx
R
F(x) = f(x) ⇐⇒ f(x) dx = F(x)
significa que f(x) é a derivada de F(x) se, e somente se, F(x) é a integral (ou anti-derivada
ou primitiva) de F(x). Para ficar claro:
24
Para uma confirmação extra disto, faça o gráfico da função quadrática
A(x) = x(80 − 2x)
= −2x2 + 80x,
que é, obviamente, uma párabola com concavidade para baixo, com raı́zes x = 0 e x = 40, abcissa do vértice
xV = 20 e ordenada do vértice f (xV ) = 800.
26
CAPÍTULO 1. INTRODUÇÃO
R
f(x) dx iguala a função F(x) cuja derivada resulta em f(x).
Antes dos exemplos, considere o seguinte:
Seja C uma constante arbitrária e considere válida a equivalência anterior. Daı́
d
dx
F(x) + C) = f(x) ⇐⇒
R
f(x) dx = F(x) + C
também é válida.
Vejamos alguns exemplos:
1. Seja r ∈ R, r 6= −1, fixo. Daı́
Z
xr dx =
xr+1
+C
r+1
pois
d
dx
xr+1
1 d
+C =
xr+1
r+1
r + 1 dx
1
=
· (r + 1)xr
r+1
= xr .
2. Para completar o exemplo anterior, temos
Z
Z
1
−1
x dx =
dx
x
= ln |x| + C.
De fato, por um lado, seja x > 0. Daı́:
d
d
ln |x| + C =
ln x + C
dx
dx
1
= .
x
Por outro lado, seja agora x < 0. Daı́:
d
d
ln |x| + C =
ln(−x) + C
dx
dx
1
= (−1) ·
(−x)
1
=
x
via a regra da cadeia na segunda igualdade para a função interna y = −x e a função
externa z = ln y.
1.2. CÁLCULO DE FUNÇÕES REAIS DE UMA VARIÁVEL REAL
3. Para trigonométricas e inversas, é imediato que
Z
Z
cos x dx = sen x + C,
sen x dx = − cos x + C,
Z
1
√
dx = arcsen x + C e
1 − x2
De fato, temos que
d
sen x + C = cos x,
dx
Z
4. É imediato que
Z
e
d
tan x + C = sec2 x,
dx
d
1
.
arctan x + C =
dx
1 + x2
ex dx = ex + C.
O caso geral, para a 6= 0 constante, é o seguinte:
Z
eax
+ C.
eax dx =
a
De fato,
d
dx
1 d ax
eax
+C =
(e )
a
a dx
1
= · aeax
a
= eax
via a regra da cadeia.
5. Se F ′ (x) = f(x) e a é uma constante não-nula, então
Z
af(x) dx = aF(x) + C
Z
= a f(x) dx
pois
d
d
aF(x) + C = a
F(x)
dx
dx
= af(x).
Por exemplo,
Z
2x
sec2 x dx = tan x + C,
1
dx = arctan x + C.
1 + x2
d
− cos x + C = sen x,
dx
d
1
arcsen x + C = √
dx
1 − x2
Z
Z
2e dx = 2 e2x dx
= e2x + C.
27
28
CAPÍTULO 1. INTRODUÇÃO
R
2
6. Queremos agora calcular a integral 2xex dx!
2
f(x) = 2xex não parece o resutado da aplicação da regra da cadeia em alguma
função F(x)?
De fato, se u(x) = x2 e v(u) = eu , então a derivada de
F(x) = v(u(x))
= eu(x)
= e2x
em relação a x é dada por
d
d
u(x) ·
v(u)
dx
du
= 2x · eu
F ′ (x) =
2
= 2xex .
Assim, temos que
Z
2
2
2xex dx = ex + C.
7. Vamos agora calcular a integral
Z
Bom, sabemos que
Z
Façamos assim
Z
1
dx.
4 + x2
1
dx = arctan x + C
1 + x2
Z
1
dx
2
4 1 + x4
Z
1
1
=
dx.
4 1+ x 2
1
dx =
4 + x2
2
Será que
Não pois
Z
1
dx = arctan(x/2) + alguma constante?
1 + (x/2)2
1
d
1
arctan(x/2) = ·
dx
2 1 + (x/2)2
pela regra da cadeia. Aparece um incômodo fator 1/2. Logo, levando em consideração tal fator, temos
Z
x
1
1
dx
=
·
2
·
arctan
+C
4 + x2
4
2
arctan x2
+ C.
=
2
1.2. CÁLCULO DE FUNÇÕES REAIS DE UMA VARIÁVEL REAL
29
8. Pode ser facilmente demonstrado que a integral da soma de funções é a soma das
integrais destas funções. Daı́, por exemplo,
Z
Z
Z
Z
1
4
3
0
3
dx
=
(−4)
x
dx
+
x
dx
+
(−4)
dx
−4x + 1 −
4 + x2
4 + x2
x4 x1
= −4 ·
+
− 4 · (integral do exemplo 7)
4
1
x
= −x4 + x − 2 arctan
+ C.
2
Existem técnicas que podem ser úteis no cálculo de integrais. Por exemplo, a integração
por substituição e a integração por partes.25
• cálculo de área via integral:
Seja f(x) uma função não-negativa definida num intervalo [a, b]. Considere ainda que f(x)
é contı́nua neste intervalo, isto é, o gráfico de tal função não é interrompido em (x, f(x))
para todo x naquele intervalo.
(b, f(b))
(x, f(x))
(a, f(a))
a
x
b
Uma importante consequência do teorema fundamental do cálculo (confira gonick) nos diz que se F(x) é uma primitiva de f(x), isto é, (F(x)+C) ′ = f(x), num intervalo
aberto que contenha [a, b], então a área delimitada pelo gráfico de f(x), o intervalo [a, b]
e as retas x = a e x = b é dada por
b
F(b) − F(a) := F(x)a
Zb
:= f(x) dx
a
unidades de área (u.a.).
Por exemplo, considere os seguintes gráficos:
4
1
y
0
25
Veja gonick!
y=x
1
x
y
y = x2
1
0
1
2
x
30
CAPÍTULO 1. INTRODUÇÃO
A área relativa ao gráfico da esquerda é calculada por
1
Z1
x2 x dx = 2 0
0
12 02
=
−
2
2
1
u.a..
=
2
De fato, tal área também é calculada por
1·1
base × altura
=
2
2
1
u.a..
=
2
Agora, a área referente ao gráfico da direita é dada por
2
Z2
x3 2
x dx = 3 1
1
23 13
=
−
3
3
8 1
= −
3 3
7
u.a..
=
3
Para concluir, é importante dizer que, independente de f(x) ser não-negativa,
Zb
f(x) dx = F(b) − F(a)
a
é dita a integral definida de f(x) (entre x = a e x = b).26
26
x = a e x = b são ditos os limites de integração.
1.3. FUNDAMENTOS DE CÁLCULO DE UMA VARIÁVEL
1.3
31
Fundamentos de Cálculo de Uma Variável
Apenas leitores com viés para o rigor matemático devem tentar resolver os
exercı́cios que seguem.
Parte I
1. R ∋ a é dito um ponto de acumulação de S ⊂ R quando a condição dada na caixa que
segue é satisfeita.
Dado ε > 0 arbitrário, existe algum x ∈ S tal que 0 < |x − a| < ε.
Mostre que:
(a) 0 é um ponto de acumulação de S = {1/n | n ∈ N};
(b) Z não tem pontos de acumulação.
2. Sejam: f uma função; a um ponto de acumulação de Dom(f); L ∈ R.
lim f(x) = L
x→a
significa que, dado ε > 0 arbitrário, é possı́vel apresentar algum δ = δ(ε) > 0 tal que a
condição da caixa que segue seja válida.
x ∈ Dom(f), 0 < |x − a| < δ ⇒ |f(x) − L| < ε.
Use tal definição de limites para demonstrar cada um dos cinco itens seguintes.
(a) Se lim f(x) existe, então tal limite é único.27
x→a
(b) Se lim f(x) = L e lim g(x) = M, então:
x→a
x→a
i. lim (f + g)(x) = L + M;
x→a
ii. lim (f · g)(x) = L · M;
x→a
iii. lim (f/g)(x) = L/M se M 6= 0.
x→a
iv. f(x) ≥ 0 (respectivamente, f(x) ≤ 0) para cada x ∈ Dom(f) suficientemente
próximo de a ⇒ L ≥ 0 (respectivamente, L ≤ 0).
Sugestão: Para o item anterior, considere L < 0 e ε = − L2 (respectivamenete,
L > 0 e ε = L2 ). Obtenha daı́ uma contradição.
3. Seja p(x) um polinômio. Mostre que p é contı́nua em a demonstrando os itens abaixo.
(a) Pela definição de limites, lim c = a para toda constante c.
x→a
(b) Pela definição de limites, lim x = a.
x→a
(c) Pelo item anterior, pelo item ii. da questão anterior e por indução finita, lim xn = an
x→a
para cada inteiro positivo n.
27
Assuma que L 6= M são ambos limites de f em a. Considere ε = |L − M|/2 na definição anterior. Use a
desigualdade triangular para obter a contradição 2ε < 2ε.
32
CAPÍTULO 1. INTRODUÇÃO
(d) Pelo itens (a) e (c) anteriores e pelo item ii. da questão anterior, lim cxn = can para
x→a
cada constante c.
(e) Pelo item anterior, pelo item i. da questão anterior e por indução finita, lim p(x) =
x→a
p(a).28
4. Demonstre que lim+ f(x) e lim− f(x) existem e são iguais se, e somente se, lim f(x) existe.
x→a
x→a
x→a
Neste caso, tal limite iguala os limites laterais.29
5. Considere ε > 0 arbitrário. Use a definição adequada de limites para verificar cada item
seguinte.30
(a) lim 3x − 1 = 5.31
x→2
(b) lim 2 − 4x = 6.32
x→−1
(c) lim x sen x1 = 0.33
x→0
(d) Se g(x) é limitada, isto é, existe B ∈ R tal que |g(x)| ≤ B para todo x ∈ Dom(g),
então
lim xg(x) = 0.34
x→0
√
√
(e) Se a > 0, então lim x = a.35
2
(f) lim x + 1 = 5.
x→a
36
x→−2
1
(g) lim 2x+1
= 15 .37
x→2
√
(h) lim+ x = 0.38
x→0
28
29
Uma função f é dita contı́nua em a ∈ Dom(f) quando, na definição de limite dada na questão 2, L = f(a).
Para definir lim+ f(x) = L, basta considerar Dom(f) = (a, b) na definição de lim f(x) = L dada anteriorx→a
x→a
mente. Neste caso, escreva 0 < |x − a| < δ como 0 < x − a < δ. Analogamente, para definir lim− f(x) = L, basta
x→a
considerar Dom(f) = (c, a) na definição de lim f(x) = L dada anteriormente. Neste caso, escreva 0 < |x − a| < δ
x→a
como −δ < x − a < 0.
30
Além das definições de limites já apresentadas, considere agora as definições seguintes, para f definida no
intervalo I e ε > 0, como já estabelecido, arbitrariamente dado.
(a)
(b)
31
lim f(x) = L quando existe algum K = K(ε) > 0 tal que:
x→+∞
x ∈ I = (a, +∞), x > K ⇒ |f(x) − L| < ε;
lim f(x) = L quando existe algum K = K(ε) > 0 tal que
x→−∞
x ∈ I = (−∞, b), x < −K ⇒ |f(x) − L| < ε.
Sugestão: Tome δ ≤ ε/3. Justifique como tal escolha (para δ) é feita.
Sugestão: Tome δ ≤ ε/4. Justifique como tal escolha é feita.
33
Sugestão: Tome δ ≤ ε. Justifique como tal escolha é feita.
34
Note que, embora tenhas que resolver o item anterior pela definição, uma resolução mais simples é via este
item!
√ 35
Sugestão: Tome δ ≤ min a, ε a . Justifique como tal escolha é feita.
36
Sugestão: Tome δ ≤ min {1, ε/5} ou δ ≤ min {2, ε/6}. Justifique como tais escolhas são feitas.
37
Sugestão: Tome δ ≤ min {2, 5ε/2}. Justifique como tal escolha é feita.
38
Sugestão: Tome δ ≤ ε2 . Justifique como tal escolha é feita.
32
1.3. FUNDAMENTOS DE CÁLCULO DE UMA VARIÁVEL
(i) Se f(x) =
(j)
lim 1
x→±∞ x
|x|
,
x
33
então não existe lim f(x) pois lim− f(x) = −1 e lim+ f(x) = 1.
x→0
x→0
x→0
= 0.
6. Se f é uma função definida no intervalo I e y = 1/x, demonstre os dois itens abaixo.
(a) Para I = (a, +∞),
lim f(x) = L ⇔ lim+ f(1/y) = L.39
x→+∞
(b) Para I = (−∞, b),
y→0
lim f(x) = L ⇔ lim− f(1/y) = L.
x→−∞
y→0
7. Use a questão anterior e o item (c) da questão 5 para mostrar que
sen x
= 0.
x→+∞
x
lim
8. Assuma que f e g são contı́nuas em a. Demonstre então que:
(a) f + g é contı́nua em a;
(b) f · g é contı́nua em a;
(c) f/g é contı́nua em a se g(a) 6= 0.
Sugestão: Use o item (b) da questão 2 anterior.
9. Use a questão anterior pra mostrar que
√
8x + x + 1
h(x) =
2x2 + x + 9
é contı́nua para todo x > 0.
10. Se g é contı́nua em a e f é contı́nua em g(a), demonstre que f ◦ g é contı́nua em a.
11. Use a questão anterior para mostrar que a função
ϕ(x) =
é contı́nua para todo x ∈ R.
p
3
6(x3 − 1)2 + 2 + 1
12. f é dita contı́nua em [a, b], a < b, quando as duas condições que seguem são satisfeitas.
• f é contı́nua em (a, b);
• lim+ f(x) = f(a) e lim− f(x) = f(b).
x→a
(a) Mostre que f(x) =
x→b
√
x é contı́nua em [0, b].40
39
Para ⇒, se ε > 0, escolha K = K(ε) > 0 em relação ao limite de f quando x → +∞. Use então δ ≤ 1/K.
Usar: item (e) da questão 5 para verificar que f é contı́nua em (0, b); item (h) da questão 5 para verificar
que lim+ f(x) = f(0); item (e) da questão 5 e questão 4 para verificar que lim− f(x) = f(b).
40
x→0
x→b
34
CAPÍTULO 1. INTRODUÇÃO
(b) Mostre que f(x) = x sen
1
x
não é contı́nua em [0, b].41
(c) Seja s a função definida em [0, b] por
x sen
s(x) =
0
1
x
se x 6= 0;
.
se x = 0.
i. Mostre que lim+ s(x) = s(0).42
x→0
ii. Mostre que s é contı́nua em [0, b].43
13. Demonstre o Teorema da Conservação de Sinal (TCS), isto é, se f é contı́nua em
c e f(c) 6= 0, demonstre que existe algum δ > 0 tal que f(x) · f(c) > 0, isto é, f(x) e f(c)
têm mesmo sinal, para cada x ∈ Dom(f) para o qual |x − c| < δ.
Sugestão: Considere ε = |f(c)|
para lim f(x) = f(c). Conclua daı́ que:
2
x→c
f(x) >
f(x) <
f(c)
2
f(c)
2
se f(c) > 0,
se f(c) < 0.
14. Seja S um conjunto não-vazio de números reais. S é dito limitado superiormente (respectivamente, inferiormente) quando existe algum número real B cuja condição dada na
caixa que segue seja válida.
x ≤ B (respectivamente, B ≤ x) para cada x ∈ S.
Neste caso, a existência do menor (respectivamente, maior) entre todos tais números B,
denotado por sup S (respectivamente, inf S) é garantida. Por causa disso, dizemos que R
é completo.
(a) Considere o conjunto S do item (a) da questão 1. Mostre que sup S = 1 e inf S = 0.
(b) Preencha os detalhes da demonstração do Teorema do Valor Intermediário
(TVI) dada a seguir.
TVI: Se f : [a, b] → R é contı́nua e f(a) 6= f(b), então f assume em (a, b) todos
os valores entre f(a) e f(b).
Demonstração: Considere f(a) < d < f(b) e S = {x ∈ [a, b] | f(x) < d}. Daı́,
como R é completo, obtenha f(c) = d com c = sup S. De fato, suponha que
f(c)−d < 0 e use o TCS (da questão anterior) na função ϕ(x) = f(x)−d. Considere
ainda x̄ = c + δ2 . Obtenha daı́ que x̄ ∈ S, que é uma contradição. Daı́ f(c) ≥ 0.
Repita o argumento com a suposição f(c)−d > 0. Para concluir, se f(b) < d < f(a),
aplique o caso anterior para g(x) = −f(x). Obtenha daı́ c ∈ (a, b) tal que f(c) = d.
(c) Use o TVI para verificar que cada uma das equações seguintes tem uma raiz entre
os números indicados.
i. cos x = x entre 0 e 1.
41
42
Verifique que embora lim+ f(x) = 0 (pelo item (c) da questão 5 e pela questão 4), f(0) não está definida.
x→0
Use o item (c) da questão 5 e a definição de s.
43
Usar: item anterior; item (b) da questão 8, questão 10 e que sen x é contı́nua para mostrar que s(x) é
contı́nua para x 6= 0; questão 4 para mostrar que lim− = s(b).
x→b
1.3. FUNDAMENTOS DE CÁLCULO DE UMA VARIÁVEL
35
ii. 2x3 − 5x2 − 10x + 5 = 0 entre: −2 e −1; 0 e 1; 3 e 4.
iii. ln x = e−x entre 1 e 2.
15. Demonstre que f é contı́nua em a se, e somente se, lim (f(a + h) − f(a)) = 0.
h→0
16. Seja f uma função cujo domı́nio contém um intervalo aberto de centro a, isto é, seja a
um ponto interior ao Dom(f).
f é dita diferenciável em a quando existe o limite do quociente de Newton dado na caixa
que segue.
f ′ (a) = lim
h→0
f(a+h)−f(a)
.
h
Neste caso, f ′ (a) é dito a derivada de f em a e
y = f ′ (a)x + (f(a) − f ′ (a)a)
é dita a equação da reta tangente ao gráfico de f em (a, f(a)). (Para uma ilustração de
uma tal reta, confira a página 39.)
Use a questão anterior para provar que f é contı́nua em a se f é diferenciável em a.
17. Use a definição de derivada dada na questão anterior para mostrar que:
(a) f(x) = x2 , x ∈ R, é diferenciável e que f ′ (x) = 2x;
(b) f(x) = x3 , x ∈ R, é diferenciável e que f ′ (x) = 3x2 ;
√
(c) f(x) = x = x1/2 , x > 0, é diferenciável e que f ′ (x) =
1
√
2 x
= 21 x−1/2 .
Ainda, para cada um dos três itens anteriores, obtenha a equação da reta tangente ao
gráfico de f em (1, 1).
18. Vale a recı́proca da penúltima questão? Considere, por exemplo, f(x) = |x| e a = 0. f é
contı́nua em a? f é diferenciável em a? (Use a definição de continuidade dada na nota
de rodapé do item (d) da questão 3 e a definição de derivada dada na penúltima questão
para justificar suas respostas. Confira também o ı́tem (i) da questão 5.)
19. Sejam f e g diferenciáveis em a. Demonstre que:
(a) f + g é diferenciável em a e (f + g) ′ (a) = f ′ (a) + g ′ (a);
(b) fg é diferenciável em a e (fg) ′ (a) = f ′ (a)g(a) + f(a)g ′ (a);
(c) f/g é diferenciável em a e (f/g) ′ (a) =
f ′ (a)g(a)−f(a)g ′ (a)
[g(a)]2
se g(a) 6= 0.
20. Demonstre a Regra da Cadeia, isto é, se f é diferenciável em a e g é diferenciável em
f(a), demonstre que g ◦ f é diferenciável em a e, neste caso,
(g ◦ f) ′ (a) = f ′ (a) · g ′ (f(a)).
21. Use as questões 17, 19 e 20 para derivar a função ϕ da questão 11.
36
CAPÍTULO 1. INTRODUÇÃO
22. Seja f diferenciável em a como na questão 16.44 Se a é um ponto de máximo (respectivamente, mı́nimo) local de f,45 mostre então que a é um ponto crı́tico de f, isto é, f ′ (a) = 0.
Sugestão: Sem perda de generalidade, seja a um ponto (interior ao Dom(f)) de máximo
local. Considere então o quociente de Newton em a tanto para h < 0 quanto para h > 0.
Agora, via os limites laterais de tal quociente, a questão 4 e o item iv. da questão 2,
deduza que f ′ (a) é simultaneamente ≤ 0 e ≥ 0.
23. Vale a recı́proca da questão anterior? Por exemplo, considere f(x) = x3 e a = 0.
Parte II
1. Uma sequência N ∋ n 7→ xn ∈ R é denotada por (xn ) e o inteiro positivo n é o ı́ndice
do termo xn . Dizer que tal sequência é convergente para L ∈ R significa dizer que, dado
ε > 0 arbitrário, existe um ı́ndice N = N(ε) tal que
n > N ⇒ |xn − L| < ε .46
Neste caso, dizemos que L é o limite de (xn ) e denotamos lim xn = L.
n→∞
(a) Mostre que uma sequência constante converge para tal constante.
1
n→∞ n
(b) Verifique que lim
= 0.47
(c) Demonstre a unicidade do limite de uma sequência convergente.
(d) Enuncie e demonstre as tradicionais propriedades da soma, produto e quociente de
limites para sequências convergentes.
(e) Sejam c ∈ R e k ∈ N duas constantes. Use os itens (a), (b) e (d) anteriores para
mostrar que lim nck = 0.
n→∞
(f) Demonstre o Teorema do Sanduı́che para Sequências (TSS), isto é, se N é
um inteiro positivo, xn ≤ yn ≤ zn para cada ı́ndice n > N e lim xn = lim zn = L,
n→∞
n→∞
demonstre que lim yn = L.
n→∞
(g) Use o item anterior para mostrar que
lim |xn | = 0 ⇒ lim xn = 0.
n→∞
n→∞
(h) Dada a sequência (xn ), se a função f(x) é tal que f(n) = xn para todo ı́ndice n e
lim f(x) = L, demonstre que lim xn = L.
x→∞
n→∞
(i) Seja 0 ≤ r < 1. Considere o item anterior e suponha já termos demonstrado que
lim rx = 0. Qual conclusão é obtida daı́?
x→∞
(j) Dizer que (xn ) é limitada significa dizer que existe B ∈ R tal que
|xn | ≤ B para todo ı́ndice n .
44
Daı́, em particular, a é um ponto interior ao domı́nio de f!
O que isto significa?
46
Todos os termos da sequência de indı́ces maiores que N pertencem a (L − ε, L + ε).
47
Use o item (a) da questão 1 da Parte I.
45
1.3. FUNDAMENTOS DE CÁLCULO DE UMA VARIÁVEL
37
Mostre que toda sequência convergente é limitada.
(k) Sejam
x1 = 3, 1,
x2 = 3, 14,
xn = 3, 1415926 . . . dn
...,
e dn o dı́gito da n-ésima casa decimal de π. Verifique que tal sequência é limitada
e convergente.48
(l) Seja xn = (−1)n para cada ı́ndice n. Verifique, pela definição, que a sequência (xn )
é limitada mas não é convergente.
2. Divida o intervalo [0, 1] em n partes iguais. Cada uma destas partes é um subintervalo
de comprimento 1/n. Tais subintervalos têm extremos
0,
n−1 n
1 2
, ,...,
, = 1.
n n
n n
Para a (parte da) parábola f(x) = x2 com x ∈ [0, 1], considere os retângulos cujas bases
sejam os n subintervalos e cujas alturas sejam as imagens por f dos extremos destes
subintervalos. (Para uma representação geométrica destes retângulos para n = 8, confira
a ilustração que segue.)
f(x) = x2
Y
0
1
8
1
4
3
8
1
2
5
8
3
4
7
8
1
X
Seja sn (respectivamente, Sn ) a soma das áreas destes retângulos de alturas dadas pelos
extremos inferiores (respectivamente, superiores) destes subintervalos. Por último defina
R1
f como o valor da área da região limitada pelo gráfico de f, pelo eixo das abcissas e
0
pelas retas x = 0 e x = 1. Obviamente, sn ≤
(a) Calcule sn e Sn para n = 2, 4, 8, 16, 32.
R1
0
f ≤ Sn .
(b) Mostre que lim sn = lim Sn = 13 .49
n→∞
n→∞
48
Para a convergência, mostre que π − xn ≤ 10−n para cada ı́ndice n. Depois use o TSS combinado com o
item (i) anterior.
49
Mostre, por indução finita, que
12 + 22 + 32 + · · · + n2 =
n(n + 1)(2n + 1)
,
6
n ∈ N.
38
CAPÍTULO 1. INTRODUÇÃO
(c) O que o item anterior te diz sobre o valor de
R1
f.50
0
3. Como na questão anterior, seja f uma função real não negativa e contı́nua sobre [a, b].
Divida tal intervalo em n subintervalos, não necessariamente de mesmo comprimento,
[xi , xi+1 ] , i = 1, 2, . . . , n,
tais que x1 = a, xn+1 = b e, sendo ∆n o maior entre os comprimentos de todos tais
subintervalos,
lim ∆n = 0.
n→∞
Por outro lado, suponha já termos demonstrado o Teorema dos Valores Máximo
e Mı́nimo (TMM), isto é, se uma função é contı́nua num intervalo fechado e limitado,
assuma já termos provado que tal função assume valores máximo e mı́nimo (globais) em
tal intervalo. Então, sendo mi e Mi os valores mı́nimo e máximo de f em [xi , xi+1 ] , i =
1, 2, . . . , n, considere a soma inferior (respectivamente, superior)
sn :=
n
X
mi (xi+1 − xi ) (respectivamente, Sn :=
i=1
n
X
Mi (xi+1 − xi ) )
i=1
de Riemann de f em relação a partição {x1 , x2 , . . . , xn , xn + 1} de [a, b]. Assim, devido a f
ser contı́nua, pode ser demonstrado que os limites lim sn e lim Sn existem e são iguais.
n→∞
n→∞
Neste caso, defina a área da região limitada pelo gráfico de f, pelo eixo x e pelas retas
Rb
x = a e x = b como sendo tal limite comum. Denote tal área por f. Defina ainda a
a
função I do seguinte modo:
Demonstre os itens seguintes:
[a, b] ∋ x 7→ I(x) =
Zx
f.
a
(a) I é diferenciável e I ′ = f, isto é, I é uma primitiva de f;
Sugestão: Inicie considerando a continuidade de f no intervalo [x, x + h] ⊂ [a, b]
para h suficientemente pequeno mas positivo. Daı́, pelo TMM, existem xm , xM ∈
[x, x + h] tais que, neste intervalo, f (xm ) é o menor e f (xM ) é o maior entre todos
os valores de f. (Por exemplo, na ilustração seguinte, xM = x e xm = x + h.)
y = f(x)
a
x
x+h
b
X
Depois use tal identidade no cálculo de lim Sn . Ainda, no cálculo do limite anterior, use o item (e) da questão
n→∞
1 anterior. Para concluir, utilize um raciocı́nio análogo para calcular lim sn .
50
n→∞
Use o TSS.
1.3. FUNDAMENTOS DE CÁLCULO DE UMA VARIÁVEL
39
Agora, compare as áreas dos retângulos aproximantes e da região sob a curva y =
f(x) de base [x, x + h] via
f (xm ) h ≤
Z x+h
x
f ≤ f (xM ) h.
Verifique então que a área entre as desigualdades é dada por I(x + h) − I(x). Estude,
para concluir, o quociente de Newton que surge daı́ para h → 0.
(b) (Teorema Fundamental do Cálculo (TFC) para Funções Não Negativas)
x=b
Rb
F é uma primitiva de f ⇒ a f = F(b) − F(a) := F(x)x=a .
Sugestão: Use que F − I é uma função constante.
4. Considere as mesmas hipóteses da questão anterior com uma exceção: f agora pode
assumir também valores negativos em [a, b]. Escolha x̄i ∈ [xi , xi+1 ] para i = 1, 2, . . . , n.
Então, como
mi (xi+1 − xi ) ≤ f (x̄i ) (xi+1 − xi ) ≤ Mi (xi+1 − xi )
para i = 1, 2, . . . , n, segue que
sn ≤
n
X
i=1
f (x̄i ) (xi+1 − xi ) ≤ Sn .
Considere agora tais desigualdades para n tão grande quanto se queira. Como na questão
anterior, devido a f ser contı́nua e lim ∆n = 0, podem ser demonstradas a existência e a
n→∞
igualdade dos limites das sequências que figuram em tais desigualdades, bem como que
lim
n→∞
n
X
f (x̄i ) (xi+1 − xi )
i=1
é independente da escolha de x̄i , i = 1, 2, . . . , n. Tal limite é dito a integral definida de
Rb
f em [a, b] e é denotado por f(x)dx. Ainda, neste caso, f é dita integrável. (Observe
a
que, se f é não negativa,
Rb
a
a < b.
Resolva os seguintes itens:
f(x)dx =
Rb
f.) Para terminar, defina
f(x) =
Verifique daı́ que:
a
a
(a) Considere a função
Rb
Ra
f(x)dx = − f(x)dx se
b
−x2 se x < 0,
x2 se x ≥ 0.
+
−
+
i. lim S2n = 0 com S2n = S−
n +Sn tal que Sn e Sn são somas superiores de Riemann
n→∞
de f restrita aos intervalos [−1, 0] e [0, 1], respectivamente.51
R1
ii. f(x)dx = 0.52
−1
51
52
Use o item 2.(b) anterior.
Use o item anterior.
40
CAPÍTULO 1. INTRODUÇÃO
(b) Use a definição de Integral anterior e propriedades de somatórios adequadas para
demonstrar que:
Rb
Rc
Rb
i. f(x)dx = f(x)dx + f(x)dx se c ∈ [a, b];
c
a
a
Sugestão: Inicie considerando 2n subintervalos de [a, b], digamos
[xi , xi+1 ], i = 1, 2, . . . , 2n,
com x1 = a, xn+1 = c e x2n+1 = b, e escolhendo x̄i pertencente ao i-ésimo
subintervalo anterior, i = 1, 2, . . . , 2n. Daı́, estude
2n
X
f (x̄i ) (xi+1 − xi ) =
i=1
n
X
f (x̄i ) (xi+1 − xi ) +
i=1
2n
X
f (x̄i ) (xi+1 − xi )
i=n+1
para n suficientemente grande. (Note ainda que, se j = i − n, então o último
n
P
f (x̄j ) (xj+1 − xj ).)
somátorio anterior é dado por
j=1
ii.
Rb
a
Rb
(constante · f(x))dx = constante · f(x)dx;
a
iii. f1 e f2 são contı́nuas em [a, b] ⇒
iv.
Rb
a
Rb
(f1 (x) + f2 (x)) dx =
a
f(x)dx ≥ 0 se f é não negativa em [a, b].
Rb
a
Rb
f1 (x)dx + f2 (x)dx;
a
(c) Suponha já termos demonstrado o TFC para funções não necessariamente não negativas, isto é, se f : [a, b] → R é contı́nua, assuma termos provado que
Zb
t=b
f(t)dt = F(t)t=a = F(b) − F(a).
a
Use tal fato para demonstrar as técnicas de integração enunciadas nos dois subitens
seguintes.
i. (Integração por Substituição)
u
Se [c, d] ∋ x 7→ u(x) ∈ [a, b] é uma bijeção com derivada contı́nua, não nula e
tal que u(c) = a e u(d) = b, então
Zd
Zb
du
f(u(x)) dx = f(u)du.
dx
c
a
Sugestão: Inicie considerando uma primitiva F de f e a integração
Zd
Zd
du
du
f(u(x)) dx = F ′ (u(x)) dx
dx
dx
c
c
Zd
d
(F(u(x))) dx,
=
c dx
onde usamos a Regra da Cadeia (exercı́cio 20 da Parte I) na última igualdade. Agora use o TFC na última integral e continue daı́.
1.3. FUNDAMENTOS DE CÁLCULO DE UMA VARIÁVEL
41
ii. (Integração por Partes)
Use a Regra da Derivada do Produto (exercı́cio 19.(b) da Parte I) para
demonstrar que, se u e v são contı́nuas em [a, b], então
Zb
x=b
dv
du
v(x) dx = u(x)v(x) x=a − u(x) dx
dx
dx
a
a
b R b
Rb
(que costumamos denotar por a vdu = uva − a udv).
Zb
(d) Em bons livros de Cálculo de Uma Variável, encontre e resolva integrais que utilizem, em tais resoluções, as duas técnicas de integração enunciadas nos dois subitens
anteriores.
42
CAPÍTULO 1. INTRODUÇÃO
Capı́tulo 2
Definições Básicas
“Suppose that you want to
teach the ‘cat’ concept to a very
young child. Do you explain
that a cat is a relatively small,
primarily carnivorous mammal
with retractible claws, a
distinctive sonic output, etc.?
I’ll bet not. You probably show
the kid a lot of different cats,
saying ‘kitty’ each time, until it
gets the idea. To put it more
generally, generalizations are
best made by abstraction from
experience.”
Ralph Philip Boas, Jr.
Como todos devem recordar, se A e B são dois conjuntos não vazios, uma função f (definida em
A a valores em B) associa a cada elemento a ∈ A um único elemento f(a) ∈ B; A é o domı́nio
de f; f(a) é a imagem de a (por f) e o subconjunto de B de todas tais imagens é a imagem de
f.
Aqui estudaremos funções f cujos domı́nios são subconjuntos do Rn e cujas imagens são subconjuntos do Rm , isto é,
A = Dom(f) ⊂ Rn
e Im(f) ⊂ Rm = B.
No já estudado ‘Cálculo de Funções y = f(x) Reais de Uma Variável Real’ temos n = m = 1:
• Para todo x ∈ Dom(f) ⊂ R, existe y ∈ R tal que y = f(x).
Aqui estudaremos principalmente os casos em que:
• n = 2 e m = 1: Para todo (x, y) ∈ Dom(f) ⊂ R2 , existe z ∈ R tal que z = f(x, y);
• n = 3 e m = 1: Para todo (x, y, z) ∈ Dom(f) ⊂ R3 , existe w ∈ R tal que w = f(x, y, z);
• n = 1 e m = 2: Para todo t ∈ Dom(f) ⊂ R, existe (x, y) ∈ R2 tal que (x, y) = f(t);
• n = 1 e m = 3: Para todo t ∈ Dom(f) ⊂ R, existe (x, y, z) ∈ R3 tal que (x, y, z) = f(t).
43
44
CAPÍTULO 2. DEFINIÇÕES BÁSICAS
No primeiro caso temos Funções Reais de Duas VariáveispReais. Por exemplo, a função f
que a cada vetor (x, y) associa o seu comprimento f(x, y) = x2 + y2 . Daı́, por exemplo,
q√ 2
√
p
2, 1/2 =
2 + (1/2)2 = 3/2 u.c..
f(3, 4) = 32 + 42 = 5 u.c. e f
Outro exemplo, a função f(x, y) = xy que calcula a área de um retângulo cuja base mede x
u.c. e cuja altura mede y u.c.. Assim, por exemplo, f(2, 2) = 4 u.a. é a área de um quadrado
cujo lado mede duas u.c..
No segundo caso temos Funções Reais de Três Variáveis Reais. Por exemplo, a função f
que a cada ponto do espaço associa a sua distância ao plano OXY. Daı́, por exemplo,
f(7, 4, −2) = 2 u.c. e f(1, 2, 3) = 3 u.c.;
Nos dois últimos casos temos as Funções (a Valores) Vetoriais (de Uma Variável Real)
ou Curvas Parametrizadas e, em geral, seus domı́nios são intervalos da reta real. Além disso,
é conveniente ressaltar que as ‘coordenadas’ de f(t) também dependem da variável independente
t, isto é, x = x(t), y = y(t) e z = z(t). Por exemplo, a função f que a cada instante de tempo
t ∈ [0, 2π) associa a posição f(t) = (cos t, sen t) de uma partı́cula numa circunferência de centro
na origem e raio unitário. (Aqui, x(t) = cos t e y(t) = sen t.)
(Em geral, denotaremos tais funções vetoriais por letras gregas. Por exemplo, no lugar de f
usaremos γ. Além disso, por abuso de notação, funções vetoriais com imagens em R3 e com
uma das componentes nula podem ser consideradas como funções vetoriais com imagens em
R2 . Por exemplo, no lugar de γ(t) = (x(t), y(t), 0) podemos usar apenas γ(t) = (x(t), y(t)).)
Como todos devem lembrar dos estudos iniciais das funções reais de uma variável real, y =
f(x), o domı́nio e a imagem de f podem ser (e quase sempre são) intervalos (ou reunião de
intervalos) da reta real.1 Cada um desses intervalos pode ser de um dos seguintes tipos: aberto,
fechado, aberto à direita e fechado à esquerda, fechado à direita e aberto à esquerda, limitado
ou ilimitado. Iniciaremos nossos estudos generalizando o conceito de intervalo da reta real
para subconjuntos do Rn que aparecem, com certa frequência, como domı́nios de funções de
várias variáveis. Terminaremos este capı́tulo estudando ‘Gráficos’ de funções de duas variáveis
e ‘Traços’ de funções vetoriais. Mas antes, vamos determinar os domı́nios e as imagens de
algumas funções z = f(x, y) e w = f(x, y, z):
1. z = x2 + y2 pode ser obtido para todo (x, y) ∈ R2 . Daı́ Dom(f) = R2 . Por outro lado,
como a soma de dois quadrados no mı́nimo é 0 e (tal soma) pode se tornar tão grande
quanto se queira (ao variarmos os pontos do domı́nio), temos que Im(f) = [0, +∞).
2. Para z = √
x+y
1−x2 −y2
, note que:
(a) O domı́nio é dado por
Dom(f) = (x, y) ∈ R2 1 − x2 − y2 > 0
= (x, y) ∈ R2 x2 + y2 < 1 ,
√
Por exemplo, o domı́nio e a imagem de y = x é o intervalo [0, +∞). Outro exemplo, o domı́nio de y = ex é
o intervalo (−∞, +∞) e a imagem é o intervalo (0, +∞), enquanto que o contrário ocorre para a função y = ln x.
O domı́nio de y = tan x é a união de intervalos
1
· · · ∪ (−5π/2, −3π/2) ∪ (−3π/2, −π/2) ∪ (−π/2, π/2) ∪ (π/2, 3π/2) ∪ (3π/2, 5π/2) ∪ · · · ,
enquanto que a sua imagem é o intervalo (−∞, +∞)!
45
isto é, o domı́nio é o conjunto dos pontos do plano que pertencem ao cı́rculo de centro
(0, 0) e raio unitário, exceto aqueles que pertencem a sua circunferência x2 + y2 = 1;
(b) Em considerando pontos do domı́nio arbitrariamente próximos da circunferência
x2 + y2 = 1, temos que op
numerador x + y é limitado, podendo ser negativo ou
positivo, e o denominador 1 − (x2 + y2 ) se aproxima de 0 pela direita, isto é,
se aproxima de ±∞. Daı́
1
z = (x + y) · p
1 − (x2 + y2 )
Im(f) = (−∞, +∞).
3. Para z = ln 9 − x2 − 9y2 , note que:
(a) O domı́nio é dado por
Dom(f) = (x, y) ∈ R2 9 − x2 − 9y2 > 0
= (x, y) ∈ R2 x2 + 9y2 < 9
2
2
2 x
= (x, y) ∈ R + y < 1
9
2
y2
2 x
= (x, y) ∈ R 2 + 2 < 1 ,
3
1
isto é, o domı́nio é o conjunto dos pontos do plano que pertencem a elipse de centro
(0, 0), eixo maior sobre o eixo dos x (com vértices em (±3, 0)) e eixo menor sobre
o eixo dos y (com vértices em (0, ±1)), exceto aqueles pontos que pertencem a sua
2
2
fronteira x32 + y12 = 1, isto é, 9 − x2 + 9y2 = 0;
(b) Em considerando
próximos da fronteira da elipse
pontos do domı́nio 2arbitrariamente
2
2
2
9 − x + 9y = 0, temos que 9 − x + 9y se aproxima
de 0 pela direita, isto é, z
se aproxima de −∞. Por outro lado, 9 − x2 + 9y2 atinge o seu maior valor quando
x2 + 9y2 alcança o seu menor valor, isto é, quando x = y = 0. Daı́
4. Para w = cos
p
Im(f) = (−∞, ln 9).
1 − x2 − y2 − z2 , note que:
(a) O domı́nio é dado por
Dom(f) = (x, y, z) ∈ R3 1 − x2 + y2 + z2 ≥ 0
= (x, y, z) ∈ R3 x2 + y2 + z2 ≤ 1 ,
isto é, o domı́nio é o conjunto dos pontos do plano que pertencem a esfera de centro
(0, 0, 0) e raio unitário: cada um desses pontos está a uma distância da origem não
maior do que 1 u.c.;
(b) Note que, para cada ponto (x, y, z) ∈ Dom(f), como
0 ≤ x2 + y2 + z2 ≤ 1 ⇔ −1 ≤ − x2 + y2 + z2 ≤ 0
⇔ 0 ≤ 1 − x2 + y2 + z2 ≤ 1
p
⇔ cos 1 ≤ cos
1 − (x2 + y2 + z2 ) ≤ cos 0
⇔ cos 1 ≤ w ≤ 1,
46
CAPÍTULO 2. DEFINIÇÕES BÁSICAS
temos que
Im(f) = [cos 1, 1].
2.1. BOLA ABERTA DE CENTRO P0 ∈ RN E RAIO R > 0
47
Bola Aberta de Centro P0 ∈ Rn e Raio r > 0
2.1
• Para n = 1, é o intervalo aberto ]P0 − r, P0 + r[;
P −r
❞0
P
+r
❞0
P
t0
A figura anterior ilustra um tal intervalo aberto.
• Para n = 2, é o conjunto dos pontos de um cı́rculo de centro P0 e raio r, exceto aqueles
que pertencem a sua circunferência, isto é, aqueles que distam de P0 exatamente r;
r
P0
A figura anterior ilustra uma bola aberta de centro P0 e raio r em R2 .
• Para n = 3, é o conjunto de todos os pontos de uma esfera de centro P0 e raio r, exceto
aqueles que distam de P0 exatamente r.
Em geral, uma tal bola aberta é o conjunto
P ∈ Rn ||P − P0 || < r ,
onde ||P − P0 || representa a distância euclidiana entre P e P0 .
2.1.1
Exemplos
• Para n = 1, P0 = x0 e P = x, a bola aberta é dada por
x ∈ R |x − x0 | < r ;
• Para n = 2, P0 = (x0 , y0 ) e P = (x, y), a bola aberta é dada por
p
x ∈ R2 (x − x0 )2 + (y − y0 )2 < r .
2.1.2
Observação
P ∈ Rn ||P − P0 || ≤ r é a Bola Fechada de Centro P0 e raio r.
48
CAPÍTULO 2. DEFINIÇÕES BÁSICAS
2.2
Conjunto Aberto - Ponto Interior
Cada ponto P0 de um subconjunto aberto de Rn , digamos, A ⊂ Rn , é interior (a A), isto é,
existe alguma bola aberta de centro P0 inteiramente contida em A.
2.2.1
Exemplos
• Para n = 1, P0 = 1 é interior ao intervalo aberto A =]0, 2[ pois 1 − 21 , 1 + 12 ⊂ A, por
exemplo. Contudo, 0 e 2 não são interiores a A. Na verdade, A é aberto: qualquer ponto
P0 ∈ A é centro de algum intervalo aberto contido em A;
• Para n = 2, considere o conjunto A ′ de todos os pontos do primeiro quadrante, exceto
aqueles que estejam nos eixos coordenados. A ′ é aberto pois qualquer um de seus pontos
é interior (a A ′ ). Nenhum ponto dos eixos coordenados é interior a A ′ ;
• Para n = 3, todos os pontos de um cubo são interiores ao mesmo, exceto aqueles pertencentes as suas faces. Um cubo sem as faces é aberto.
2.3
Ponto de Fronteira
P0 ∈ Rn está na fronteira de um subconjunto A de Rn se toda bola aberta de centro P0
intercepta A e intercepta o complementar de A em Rn .
2.3.1
Exemplos
• Para n = 1, {0, 2} é a fronteira de A =]0, 2[;
• Para n = 2, para o conjunto A ′ dos pontos do primeiro quadrante que não estejam nos
eixos coordenados, a origem e todos os pontos que pertecem aos semi-eixos coordenados
positivos formam a fronteira de A ′ ;
• Para n = 3, as faces de um cubo formam a sua fronteira.
2.4
Conjunto Compacto
Um subconjunto C de Rn é compacto quando contém a sua fronteira e está contido em
alguma bola fechada. Se apenas contém a fronteira, C é dito fechado. Se apenas está contido
em alguma bola fechada, C é dito limitado.
2.4.1
Exemplos
Nos exemplos anteriores, tanto A quanto A ′ não são compactos. Contudo, [0, 2] é compacto
pois além de conter a sua fronteira está contido em, por exemplo, [1 − 1, 1 + 1]. Agora, ainda
que consideremos a união de A ′ com a sua fronteira, tal união não é um conjunto compacto
pois nenhuma bola fechada pode contê-la. Finalmente, um cubo, incluindo as suas faces, é
compacto.
2.5. GRÁFICOS DE FUNÇÕES F REAIS
2.5
49
Gráficos de Funções f Reais
de Uma Variável Real é o conjunto
G(f) = (x, f(x)) ∈ R2 x ∈ Dom(f) ;
de Duas Variáveis Reais é o conjunto
G(f) = (x, y, f(x, y)) ∈ R3 (x, y) ∈ Dom(f) ;
de Três Variáveis Reais é o conjunto
G(f) = (x, y, z, f(x, y, z)) ∈ R4 (x, y, z) ∈ Dom(f) .
f, no primeiro caso, tem domı́nio contido em R e gráfico contido em R2 ; no segundo, domı́nio
contido em R2 e gráfico contido em R3 ; no último, domı́nio contido em R3 e gráfico contido em
R4 .
Na ilustração seguinte, exemplos de gráficos (ou partes dos mesmos) dos dois primeiros casos são
representados(as). Note que não há possibilidade de se ilustrar tridimensionalmente o último
caso!
(x, f(x))
2.5.1
(x, y, f(x, y))
Exemplos
Em alguns poucos exemplos, podemos usar algumas figuras geométricas conhecidas (planos,
esferas, parabolóides, etc) para a visualização dos gráficos.
1. Para z = f(x, y) = −x − y + 1, primeiramente note que existe z para todo (x, y) ∈ R2 ,
isto é, Dom(f) = R2 . Agora, de z = −x − y + 1 temos x + y + z − 1 = 0. Esta é a equação
do plano ax + by + cz + d = 0 para a = b = c = 1 e d = −1 (veja figura 2.1). Por fim
temos
G(f) = (x, y, −x − y + 1) ∈ R3 (x, y) ∈ R2 .
p
2. Para z = f(x, y) = 1 − x2 − y2 , primeiramente note que existe z (não negativo) para
(x, y) ∈ R2 tal que 1 − x2 − y2 ≥ 0, isto é, x2 + y2 ≤ 1. Daı́, Dom(f) é a bola fechada em
R2 com centro na√origem e raio 1. Agora, da equação da esfera unitária x2 + y2 + z2 = 1,
segue que z = ± 1 − x2 − z2 . Daı́, desconsiderando o sinal negativo, temos que
p
G(f) = (x, y, 1 − x2 − y2 ) ∈ R3 x2 + y2 ≤ 1
é a semiesfera unitária superior (veja figura 2.2).
Agora, ‘secções transversais’ de um gráfico G(f) dado acarretam curvas espaciais que, quando
projetadas no plano OXY, são ditas curvas de nı́vel da função z = f(x, y). Estas, juntamente
com intersecções de G(f) com planos verticais (paralelos ao eixo OZ), resultam num modo
qualitativo de se obter G(f) como veremos a seguir.
50
CAPÍTULO 2. DEFINIÇÕES BÁSICAS
3
2.5
2
1.5
1
z
0.5
0
-0.5
-1 1
1
0.5
0.5
0
y
0
-0.5
-0.5
x
-1-1
Figura 2.1: Gráfico da função z = f(x, y) = −x − y + 1 para x e y variando entre −1 e 1.
1
0.9
0.8
0.7
0.6
z
0.5
0.4
0.3
0.2
0.6
0.4
0.2
0
y
-0.2
-0.4
-0.6
Figura 2.2: Gráfico da função z = f(x, y) =
2.5.2
p
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
x
1 − x2 − y2 para x e y variando entre −0.7 e 0.7.
Conjunto de Nı́vel
Curva de Nı́vel c, c ∈ R fixo, no plano OXY
É a projeção no plano z = 0 (plano OXY) da interseção do gráfico de z = f(x, y) com o plano
horizontal z = c (plano paralelo ao plano OXY de altura c), isto é, é o conjunto
(x, y) ∈ R2 f(x, y) = c .
Superfı́cie de Nı́vel c, c ∈ R fixo, em R3
É o conjunto
(x, y, z) ∈ R3 f(x, y, z) = c .
Para f(x, y, z) = x2 + y2 + z2 , por exemplo, as superfı́cies de nı́vel são esferas com centro na
origem cujos raios pertencem ao conjunto [0, ∞). De fato, uma tal esfera é a representação
geométrica do conjunto
√ 2 3 2
2
2
(x, y, z) ∈ R x + y + z =
c
com c ∈ [0, ∞) fixo. Note ainda que a superfı́cie de nı́vel 0 é representada pela origem do
sistema OXYZ.
2.5. GRÁFICOS DE FUNÇÕES F REAIS
51
Exemplo do Uso de Curvas de Nı́vel e de Interseções de Gráficos com Planos
Verticais para Visualização do Gráfico de Uma Função
Seja z = f(x, y) = x2 + y2 . Da Geometria Analı́tica ou da Álgebra Linear (Identificação de
Quádricas) sabemos que x2 + y2 − z = 0 é um parabolóide de revolução com vértice na origem
e eixo das cotas como eixo de revolução. (Veja figura 2.3.)
Outro modo de visualizar o gráfico é observando, em
√ primeiro lugar, que as curvas de nı́vel são
circunferências em R2 com centro na origem e raio c (veja a ilustração seguinte), isto é, uma
tal curva pode ser representada pelo conjunto
√ 2 (x, y) ∈ R2 x2 + y2 = c =
c
com c ∈ [0, ∞) fixo.
c=0
c=1
c=4
c=9
c = 16
c = 25
Note que:
• Para constante c negativa, não existe curva de nı́vel x2 + y2 = c, isto é, nenhuma parte
do gráfico está abaixo do plano z = 0;
• Para c = 0, a curva de nı́vel x2 + y2 = 0 representa o ponto (x, y) = (0, 0);
• A medida que c cresce, cresce a altura do plano horizontal z = c, bem como o diâmetro da
circunferência x2 +y2 = c que representa a projeção da interseção do gráfico de z = x2 +y2
com o plano z = c;
• As curvas de nı́vel indicam que o gráfico pode ser o parabolóide ou o cone de vértice na
origem e eixo OZ como eixo de revolução.
Assim, para descartar a possibilidade do gráfico ser o cone, vamos interceptar z = x2 + y2 com
o plano x = 0 (ou com o y = 0), isto é, o plano OYZ (ou o OXZ). Se x = 0, então z = y2
é uma parábola em OYZ com vértice na origem e concavidade para cima (e, analogamente,
sendo y = 0, z = x2 é uma parábola em OXZ com vértice na origem e concavidade para cima),
conforme ilustrada a seguir.
52
CAPÍTULO 2. DEFINIÇÕES BÁSICAS
z = y2 (ou z = x2 )
Z
Y (ou X)
O
Em geral, a interseção do gráfico e qualquer outro plano que contenha o eixo OZ é uma parábola
em tal plano com vértice na origem e concavidade para cima. Assim, o gráfico só pode ser o
8
7
6
5
4
z
3
2
1
02
1.5
1
y
0.5
0
-0.5
-1
-1.5
-2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
x
Figura 2.3: Gráfico da função z = f(x, y) = x2 + y2 com x e y variando entre −2 e 2.
parabolóide da figura 2.3.
Para outros exemplos e alguns exercı́cios sobre o uso de curvas de nı́vel e de interseções de
planos verticais com gráficos de funções, para uma visualização destes gráficos, confira as referências dadas na seção Introdução. Ainda, é fortemente recomendável o uso de ‘softwares’
livres para a ‘plotagem’ de gráficos de funções tais como: Winplot, Kmplot, GeoGebra, Gnuplot, etc. Como diz o ditado, “uma figura vale mais do que mil palavras!”. Além disso, em
geral, tal visualização só será possı́vel via algum destes programas.
2.6. TRAÇO (OU TRAJETÓRIA) DA CURVA PARAMETRIZADA γ(T )
2.6
53
Traço (ou Trajetória) da Curva Parametrizada γ(t)
É a imagem da função γ, isto é, é o conjunto
2.6.1
Exemplos
Im(γ) = γ(t) t ∈ Dom(γ) .
O traço é uma reta que passa pelo ponto P0 = (1, 0, 4) na direção do vetor ~v = (2, 3, 5)
O conjunto
Im(γ) = P0 + t~v t ∈ R
= (1 + 2t, 3t, 4 + 5t) t ∈ R
pode ser representado geometricamente por tal reta (veja figura 2.4).
reta por (1,0,4) com vetor diretor (2,3,5)
20
15
z(t)
10
5
12
10
8
6
y(t)
4
2
01
2
3
4
5
6
7
8
9
x(t)
Figura 2.4: Traço de γ(t) = (1 + 2t, 3t, 4 + 5t).
O traço é uma circunferência de centro na origem e raio unitário no plano OXY
O conjunto
Im(γ) = (cos t, sen t, 0) t ∈ [0, 2π)
pode ser representado geometricamente por tal circunferência (veja figura 2.5). De fato, da
Relação Fundamental da Trigonometria, temos que x(t)2 + y(t)2 = cos2 t + sen2 t = 1 para todo
t ∈ [0, 2π). Por outro lado, para todo (x, y) ∈ R2 tal que x2 + y2 = 1, existe t ∈ [0, 2π) tal que
x = cos t e y = sen t.
A trajetória é uma Helix (ou Hélice)
t ∈ [0, ∞) é um subconjunto do cilindro representado pelo
O traço Im(γ)
=
(cos
t,
sen
t,
t)
conjunto (x, y, z) ∈ R3 | x2 + y2 = 1 (veja figura 2.6).2
2
Verifique!
54
CAPÍTULO 2. DEFINIÇÕES BÁSICAS
circunf. em OXY
1
0.5
0
z(t)
-0.5
-1 1
1
0.5
0.5
0
y(t)
0
-0.5
-0.5
x(t)
-1-1
Figura 2.5: Traço de γ(t) = (cos t, sen t, 0).
helix
25
20
15
z(t)
10
5
01
1
0.5
0.5
0
y(t)
0
-0.5
-0.5
x(t)
-1-1
Figura 2.6: Traço de γ(t) = (cos t, sen t, t).
2.6.2
Dinâmica de Uma Partı́cula Percorrendo o Traço
γ(t0 ) é o Vetor Posição de uma partı́cula que percorre o traço da curva γ no instante de
tempo t = t0 u.t.. No exemplo da reta que passa por P0 na direção de ~v, γ(0) = P0 é o vetor
posição da partı́cula no instante t = 0 u.t..
A seguir estudaremos os vetores Velocidade e Aceleração em t = t0 u.t..
Capı́tulo 3
Resultados - Cálculo Diferencial
“I will not define time, space,
place and motion, as being well
known to all.”
Isaac Newton
3.1
3.1.1
Curvas Parametrizadas
Limite da Função Vetorial γ(t) = (x(t), y(t), z(t)) em t = t0
É dado por
lim γ(t) =
t→t0
lim x(t), lim y(t), lim y(t)
t→t0
t→t0
t→t0
(se existem tais limites). Daı́, por exemplo, para γ(t) = t, t2 , t3 ,
lim γ(t) = lim t, lim t2 , lim t3 = (2, 4, 8).
t→2
3.1.2
t→2
t→2
t→2
Continuidade de γ(t) em t = t0
Ocorre quando
lim γ(t) = γ(t0 ) ,
t→t0
isto é, quando lim x(t) = x(t0 ), lim y(t) = y(t0 ) e lim z(t) = z(t0 ), isto é, quando x(t), y(t)
t→t0
t→t0
t→t0
e z(t) são contı́nuas em t = t0 . Assim, no exemplo anterior, γ(t) = (t, t2 , t3 ) é contı́nua em
t = 2. Também são contı́nuas funções vetoriais como as dos exemplos dados no final da seção
Definições, isto é, funções cujos traços sejam retas, circunferências e hélices!
3.1.3
Derivada da Função Vetorial γ(t) = (x(t), y(t), z(t)) em t = t0
Em existindo, é dada por
55
56
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
γ ′ (t0 ) = lim
h→0
γ(t0 +h)−γ(t0 )
h
.
Pelo item anterior, tal limite é igual a
y(t0 + h) − y(t0 )
z(t0 + h) − z(t0 )
x(t0 + h) − x(t0 )
, lim
, lim
lim
h→0
h→0
h→0
h
h
h
,
isto é, γ ′ (t0 ) = (x ′ (t0 ) , y ′ (t0 ) , z ′ (t0 )). (γ ′ (t0 ) também é chamada de Vetor Velocidade da
curva γ no instante t = t0 u.t..)
Exemplo: Reta Tangente ao Traço (a Trajetória) de γ(t) = (t, t2 ) em t = 1
Para obter o traço, considere x = t e y = t2 = x2 . Daı́ o traço é o gráfico da parábola y = x2 .
Agora, qual é a dinâmica de uma partı́cula sobre tal trajetória?
A medida que t cresce de −∞ até 0, x = t também cresce nesse intervalo, enquanto que y = t2
decresce de +∞ até 0. Quando t cresce de 0 até +∞, x = t e y = t2 também crescem em
[0, +∞). Daı́ a partı́cula ‘desce’ pela parte da parábola do segundo quadrante até atingir o
seu vértice. Depois ‘sobe’ pela parte da parábola do primeiro quadrante. Tal análise deve ser
confirmada pelo vetor velocidade. De fato, como γ ′ (t) = (1, 2t) para todo t ∈ R, seu módulo
√
1 + 4t2 diminui de arbitrariamente grande para 1 (quando t varia de −∞ até 0) e aumenta
de 1 até ficar tão grande quanto se queira (quando t varia de 0 até +∞).1
Por completeza, vamos agora exemplificar o que ocorre no instante t = 1 u.t.. P0 = γ(1) = (1, 1)
é a posição de uma partı́cula em t = 1 u.t.. ~v = γ ′ (1) = (1, 2) é o vetor velocidade em t = 1
u.t.. Assim, para obter a reta tangente a trajetória em t = 1, considere a reta que passa por
P0 na direção de ~v, isto é,
r(t) = P0 + t~v = (1 + t, 1 + 2t) ∀t ∈ R.
Para confirmar que esta é, de fato, a reta tangente a trajetória em t = 1, vamos obter a reta
y = ax + b tangente ao gráfico de f(x) = x2 no ponto de coordenadas x = t = 1 e y = t2 = 1,
isto é, em P0 , usando o Cálculo de Uma Variável. Por um lado sabemos que a = f ′ (1) = 2 · 1.
Daı́, y = 2x + b é a reta tangente ao gráfico de f em P0 = (1, 1). Por outro lado, como P0
pertence a tal reta tangente, isto é, suas coordenadas satisfazem a equação y = 2x + b, temos
que b = 1 − 2 · 1 = −1, isto é,
y = 2x − 1 ∀x ∈ R
é a equação da reta tangente ao gráfico de f(x) = x2 em P0 .
1
Note que o vetor velocidade tem direção e sentido compatı́veis com a dinâmica descrita anteriormente!
3.1. CURVAS PARAMETRIZADAS
9
57
Y
t=3
y = x2
t=2
y = 2x − 1
P0 t = 1
t=0
3
X
Para mostrar que y = 2x − 1 e r(t) = (1 + t, 1 + 2t) representam a mesma reta, basta eliminar a
variável t da segunda equação, obtendo assim a primeira. De fato, sendo x = 1 + t e y = 1 + 2t,
temos x − 1 = t = y−1
, isto é, y = 2x − 1.
2
3.1.4
Vetor Aceleração de γ(t) em t = t0 u.t.
Em existindo, é dado por
γ ′′ (t0 ) = (x ′′ (t0 ) , y ′′ (t0 ) , z ′′ (t0 )) .
Por exemplo, para γ(t) = (t, t2 ) do exemplo anterior, γ ′′ (t) = (0, 2) é constante para todo
t ∈ R.
Exercı́cios
1. Verifique que, para a curva γ(t) = (cos t, sen t) dada no final da seção Definições, em
cada instante de tempo t, o vetor velocidade é tangente ao movimento da partı́cula,
isto é, perpendicular ao vetor posição, e o vetor aceleração é simétrico ao vetor posição.
Considerando a massa da partı́cula unitária, como podemos descrever a força centrı́peta
atuando em tal partı́cula?
2. Considerando que uma partı́cula de massa unitária percorre a trajetória descrita pela
curva γ(t) = (cos t, sen t, t) (Helix) dada no final da seção Definições, como podemos
descrever a força centrı́peta atuando em tal partı́cula?
3. Para funções vetoriais γ1 (t) = (x1 (t), y1 (t), z1 (t)) e γ2 (t) = (x2 (t), y2 (t), z2 (t)), e para a
função real f(t), todas deriváveis em t = t0 , temos que, em t = t0 :
(a) (γ1 + γ2 ) ′ = γ1′ + γ2′ ;
(b) (fγ) ′ = f ′ γ + fγ ′ , onde fγ representa a multiplicação de um escalar por um vetor.
(Em particular, vale que (constanteγ) ′ = constanteγ ′ );
(c) (γ1 · γ2 ) ′ = γ1′ · γ2 + γ1 · γ2′ , onde · representa o produto escalar de dois vetores;
(d) (γ1 × γ2 ) ′ = γ1′ × γ2 + γ1 × γ2′ , onde × representa o produto vetorial de dois vetores.
58
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
4. Determine os pontos em que a curva γ(t) = (t3 − 1, t2 + 1, 3t) intercepta o plano 3x −
2y − z + 7 = 0.
3
5. A curva R ∋ t 7→ γ(t) = t, t2 , t 5−1 ∈ R3 representa o movimento de um corpo. Em
t = 1 u.t. o corpo se desprende da curva e continua seu movimento sem forças atuando
sobre ele. Determine o ponto e o instante no qual o corpo atinge o plano x + y + z = 10.
6. Suponha que uma partı́cula siga pela trajetória γ(t) = (et , e−t , cos t) até sair pela tangente
no instante t = 1 u.t.. Onde estará a partı́cula no instante t = 3 u.t.?
7. Sendo γ(t) uma curva parametrizada com coordenadas diferenciáveis tal que ||γ(t)|| = c
constante para todo t pertencente a algum intervalo aberto I, prove (usando a Regra da
Derivada do Produto Escalar) que γ(t) ⊥ γ ′ (t) para todo t ∈ I.
8. Sendo γ(t) uma curva parametrizada com coordenadas diferenciáveis, definida num intervalo aberto, cujo traço está sobre uma esfera de centro na origem e raio r, prove que
γ(t) ⊥ γ ′ (t) para todo t pertencente a tal intervalo.
9. Tente resolver exercı́cios sobre curvas parametrizadas de algum bom livro de Cálculo. Por
exemplo, confira algum dos livros referenciados no Capı́tulo 1 destas NA.
3.2. CONTINUIDADE E DIFERENCIABILIDADE
3.2
3.2.1
59
Continuidade e Diferenciabilidade
Interpretação Geométrica da Continuidade para Funções Reais de Uma (Duas) Variável (Variáveis) Real (Reais)
Formalmente, o estudo de Continuidade precisa do conceito de Limites!
y = f(x) é contı́nua se, e somente se, seu gráfico não apresenta interrupções (‘saltos’ e/ou
‘buracos’) enquanto x varia numa parte sem interrupções de Dom(f). Analogamente, z = f(x, y)
é contı́nua se, e somente se, seu gráfico não apresenta interrupções (‘saltos’ e/ou ‘buracos’)
enquanto (x, y) varia numa parte sem interrupções de Dom(f).
Daı́, por exemplo, é contı́nua uma função cujo gráfico seja o plano ax + by + cz + d = 0. Logo,
são contı́nuas:
FUNÇÃO CONSTANTE
z = cte(x, y) = constante (c = 1, a = b = 0 e d = −constante);
PROJEÇÃO NA PRIMEIRA COORDENADA
z = p1 (x, y) = x (a = 1, b = 0, c = −1 e d = 0);
PROJEÇÃO NA SEGUNDA COORDENADA
z = p2 (x, y) = y (a = 0, b = 1, c = −1 e d = 0).
3.2.2
Propriedades das Funções Contı́nuas
Somas, diferenças, produtos, quocientes adequados e composições adequadas de funções reais contı́nuas de uma variável real também são contı́nuas. O mesmo vale para funções reais
contı́nuas de duas variáveis reais.
Exemplos
Utilizando as funções cte, p1 e p2 dadas anteriormente, são contı́nuas as funções:
• z = f(x, y) =
Pk
i=1
constantei xmi yni para os mi e ni inteiros não-nulos;
√
√
• z = 3xy2 + (log 2)x3 y3 + x2 + y + cos 2π
(aqui,
constante
=
3, constante2 = log 2,
1
7
,
m
=
1,
m
=
3,
m3 = 2, m4 = m5 =
constante3 = constante4 = 1, constante5 = cos 2π
1
2
7
0, n1 = 2, n2 = 3, n3 = n5 = 0 e n4 = 1);
√
3xy2 +(log 2)x3 y3 +x2 +y+cos
• z=e
2π
7
.
Resultados análogos são válidos para funções reais q
de três variáveis reais que sejam contı́nuas.
3 2
5 z7 +2z6
.
Por exemplo, é contı́nua a função w = f(x, y, z) = πx y z+y
z2 +1
60
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
3.2.3
Derivação Parcial
É necessário o conceito de Limites para uma definição formal!
Para calcular a derivada parcial de uma função em relação a uma de suas variáveis independentes, digamos y, considera-se todas as suas outras variáveis independentes, digamos x e z,
como constantes e, em sendo possı́vel derivar-se, deriva-se a função apenas em relação a y. Por
exemplo, se w = f(x, y, z), fy pode ser obtida derivando-se f (como no cálculo de funções reais
de UMA variável real) apenas em relação a variável y, sendo x e z constantes em tal derivação.
∂f
Além da notação fy , podemos usar, por exemplo, ∂y
ou ∂w
.
∂y
Finalmente, seja f simétrica, isto é, a permutação de duas ou três de suas variáveis não modifica
tal função. Para fixar idéias, suponha que tal simetria tem lugar nas variáveis x e y (como
nos exercı́cios (a), (b) e (d) de 1, (a) e (b) de 2 e (c) de 3 dados a seguir). Assim, fy é obtida
simplesmente permutando-se as váriaveis x e y da fx . Em outras palavras, o cálculo só precisa
ser feito para fx . fy então segue via uma permutação simples.
Exercı́cios
1. Obter fx e fy para:
(a) f(x, y) = xy;
(b) f(x, y) = exy ;
(c) f(x, y) = x cos x cos y;
(d) f(x, y) = (x2 + y2 ) ln(x2 + y2 ).
2. Calcular as derivadas parciais ∂z/∂x e ∂z/∂y das funções dadas nos pontos indicados.
p
(a) z = a2 − x2 − y2 , (0, 0), (a/2, a/2);
√
(b) z = ln 1 + xy, (1, 2), (0, 0);
(c) z = eax cos(bx + y), (2π/b, 0).
3. Em cada um dos casos seguintes obter as derivadas parciais ∂w/∂x e ∂w/∂y.
(a) w = xex
(b) w =
2 +y2
x2 +y2
x2 −y2
;
;
(c) w = exy ln(x2 + y2 );
(d) w = x/y;
(e) w = cos(yexy )sen x.
3.2.4
(Vetor) Gradiente de f no Ponto P0 , isto é, ∇f(P0 )
Em existindo as derivadas seguintes, é dado por:
∇f (x0 ) = f ′ (x0 ) para P0 = x0 e y = f(x);
∇f (x0 , y0 ) = (fx (x0 , y0 ) , fy (x0 , y0 )) para P0 = (x0 , y0 ) e z = f(x, y);
∇f (x0 , y0 , z0 ) = (fx (x0 , y0 , z0 ) , fy (x0 , y0 , z0 ) , fz (x0 , y0 , z0 )) se P0 = (x0 , y0 , z0 ) e w = f(x, y, z);
Etc. (Isto é, o padrão se mantém para funções reais de mais de três variáveis reais.)
3.2. CONTINUIDADE E DIFERENCIABILIDADE
61
Exemplo
Sejam f(x, y, z) = sen(ln(xy)) + cos
fx =
temos que
xzπ
4
, em radianos, e P0 = (1, 1, 2). Daı́, como
xzπ cos(ln(xy)) zπ
cos(ln(xy))
−
sen
, fy =
x
4
4
y
e fz = −
xzπ xπ
sen
,
4
4
π
π
π
cos(ln 1)
cos(ln 1) π
− sen
e fz (P0 ) = − sen
, fy (P0 ) =
.
fx (P0 ) =
1
2
2
1
4
2
π
π
∴
∇f (P0 ) = 1 − , 1, −
.
2
4
Exemplo
Sendo r(x, y, z) = (x, y, z) o vetor que vai da origem ao ponto (x, y, z) e r(x, y, z) =
o seu módulo, o gradiente de r é dado por
∇r = (rx , ry , rz )
=
x
y
z
p
,p
,p
x2 + y2 + z2
x2 + y2 + z2
x2 + y2 + z2
1
(x, y, z)
=p
x2 + y2 + z2
r
= .
r
p
x2 + y2 + z2
!
Exercı́cios
Verifique (para pontos que não sejam a origem) que:
1. ∇ 1r = − rr3 ;
2. ∇ ln r =
r
;
r2
′
3. ∇f(r) = f (r)r
com f diferenciável. (Note que este exercı́cio generaliza os dois exercı́cios
r
anteriores.)
3.2.5
Derivadas Parciais de Ordens Superiores para f(x, y) =
yx3
cos y
x
−
y
∂f
∂f
fx = ∂x
= − cos
= − senx y − x3 são as derivadas parciais de primeira ordem
− 3yx2 e fy = ∂y
x2
de f(x, y). Em sendo possı́vel derivá-las, obtemos suas derivadas parciais de segunda ordem.
Como há tal possibilidade, obtemos então:
2 cos y
∂f
∂
∂2 f
= x3 − 6yx;
• fxx = ∂x
2 = ∂x
∂x
sen y
∂2 f
∂f
∂
• fxy = ∂y∂x
= x2 − 3x2 ;
= ∂y
∂x
y
∂f
∂
∂2 f
− 3x2 ;
= sen
= ∂x
• fyx = ∂x∂y
∂y
x2
62
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
• fyy =
∂2 f
∂y2
=
∂
∂y
∂f
∂y
= − cosx y .
Analogamente, destas derivadas de segunda ordem, podemos obter as derivadas parciais de
terceira ordem e assim sucessivamente
Não apenas para a função do exemplo dado, mas para qualquer f(x, y) definida em alguma
bola aberta de centro em (x0 , y0 ) onde fx , fy , fxy e fyx existam e sejam contı́nuas, vale que
fxy (x0 , y0 ) = fyx (x0 , y0 ) .
Exercı́cios
p
1. f(x, y) = ln( x2 + y2 ) satisfaz a equação fxx + fyy = 0?
√
2
2. Verifique que a função z = e−x /4kt / t satisfaz a zt = kzxx , dita Equação de Difusão
ou Equação do Calor, onde k é uma constante.
3.2.6
Diferenciabilidade
Aqui, o conceito de Limites é necessário!
Reta Tangente para y = f(x)
y = f(x) é diferenciável em x0 se, e somente se, existe reta tangente ao gráfico de f em
P0 = (x0 , f(x0 )) dada por
f ′ (x0 ) · (x − x0 ) + (−1) · (y(x) − f (x0 )) = 0.
(x, y(x))
(x, f(x))
(x0 , f (x0 ))
Temos, na figura anterior, (uma representação geométrica de) parte de uma reta y(x) = ax + b
tangente ao gráfico de f num ponto P0 (de tal gráfico) com a = f ′ (x0 ).
Para y = f(x) ser diferenciável em x0 basta que exista f ′ (x0 )!
Aproximação Linear
Podemos aproximar (localmente) o gráfico de f em P0 pela sua reta tangente em P0 , isto é,
(x, f(x)) próximo de P0 pode ser aproximado pelo ponto (x, y) da reta tangente, isto é, sendo
|x − x0 | = |∆x| ≪ 1 (arbitrariamente pequeno), temos que
f(x) ≈ f(x0 ) + f ′ (x0 ) · ∆x.
3.2. CONTINUIDADE E DIFERENCIABILIDADE
63
Exemplo
No inı́cio deste capı́tulo, num exemplo sobre curvas parametrizadas, vimos que para f(x) = x2
e x0 = 1, y = 2x − 1 é a reta tangente ao gráfico de f(x) no ponto P0 = (x0 , f (x0 )) = (1, 1).
(Confira páginas 34 e 35.) Vamos estimar o erro absoluto cometido quando aproximamos f(x)
linearmente no ponto x = 1, 001. (Note que ∆x = x − x0 = 0, 001.) Assim, como
f(x0 ) + f ′ (x0 ) · ∆x = f(1) + f ′ (1) · (0, 001)
= 1 + 2 · (0, 001)
= 1, 002
e
f(x0 ) = x20
= (1, 001)2
= 1, 002001,
temos que a aproximação linear calcula f(1) com erro de 10−6 .
Plano Tangente para z = f(x, y)
z = f(x, y) é diferenciável em (x0 , y0 ) se, e somente se, existe plano tangente ao gráfico de f em
P0 = (x0 , y0 , f (x0 , y0 )) dado por
fx (x0 , y0 ) · (x − x0 ) + fy (x0 , y0 ) · (y − y0 ) + (−1) · (z(x, y) − f (x0 , y0 )) = 0.2
(x, y, z(x, y))
(x0 , y0 , f (x0 , y0 ))
(x, y, f(x, y))
2
A equação do plano tangente para z = f(x, y) é dada aqui por analogia a equação da reta tangente para
y = f(x). Contudo, será obtida via a consequência (C3 ) da Regra da Cadeia.
64
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
Temos, na figura anterior, (uma representação geométrica de) parte de um plano ax + by +
cz(x, y) + d = 0 tangente ao gráfico de f num ponto P0 (de tal gráfico) com a = fx (x0 , y0 ),
b = fy (x0 , y0 ) e c = −1.
Para que z = f(x, y) seja diferenciável em (x0 , y0 ) basta
que fx e fy existam e sejam contı́nuas em alguma bola
aberta de centro (x0 , y0 )!
Aproximação Linear
Daı́ podemos aproximar (localmente) o gráfico de f em P0 pelo seu plano tangente em P0 , isto
é, (x, y, f(x, y)) próximo de P0 pode ser aproximado pelo ponto (x, y, z) do plano tangente, isto
é, sendo |x − x0 | = |∆x| ≪ 1 e |y − y0 | = |∆y| ≪ 1 (arbitrariamente pequenos), temos que
f(x, y) ≈ f (x0 , y0 ) + fx (x0 , y0 ) · ∆x + fy (x0 , y0 ) · ∆y.
Exemplo
Qual é a equação do plano
tangente a esfera de centro na origem e raio unitário no ponto
√
√
√ P0 = 1/ 3, 1/ 3, 1/ 3 ?
Resolução:
~ = (1, 1, 1), o mesmo pode ser rePor um lado, como tal plano tangente tem vetor normal n
√
presentado por x + y + z + d = 0. Daı́, como P0 satisfaz tal equação, x + y + z − 3 = 0 é a
equação do plano procurado.
p
Por outro lado, a calota superior de tal esfera é gráfico de z = f(x, y) = 1 − x2 − y2 com
x2 + y2 ≤ 1. (Confira a seção Definições.) Daı́, como fx = − √ x 2 2 e fy = − √ y2 2
1−x −y
1−x −y
√
√ existem e são contı́nuas em alguma bola aberta de centro em 1/ 3, 1/ 3 , temos que f é
diferenciável em tal ponto, isto é, a equação
fx
√
√
√
√ √ √ 1
1
1/ 3, 1/ 3 · x − √
+ fy 1/ 3, 1/ 3 · y − √
+ (−1) · z − f 1/ 3, 1/ 3 = 0
3
3
√
√ p
representa o plano tangente procurado. De fato, devido a f 1/ 3, 1/ 3 = 1 − (2/3) =
√
√
√
√ √ e fx 1/ 3, 1/ 3 = fy 1/ 3, 1/ 3 = √−1/ 3 = −1, temos
1−(2/3)
√ √ √ (−1) x − 1/ 3 + (−1) y − 1/ 3 + (−1) z − 1/ 3 = 0,
isto é, x −
√1
3
+y−
√1
3
+z−
√1
3
= 0, isto é, x + y + z −
√
3=0.
Exercı́cios
1. Obtenha a equação do plano tangente ao gráfico de z = f(x, y) no ponto P0 para:
(a) z = 2x2 + y2 (Parabolóide) e P0 = (1, 1, 3);
√
(b) z = x − y e P0 = (5, 1, 2);
(c) z = ln(2x + y) e P0 = (−1, 3, 0).
√1
3
3.2. CONTINUIDADE E DIFERENCIABILIDADE
65
2. Aproximar linearmente uma função adequada f(x, y) e a partir dela estimar:
(a) (0, 99e0,002 )8 ;
(b) (0, 99)3 + (2, 01)3 − 6(0, 99)(2, 01).
3.2.7
Regra da Cadeia
• Para x(t) diferenciável em t = t0 e f(x) diferenciável em x = x(t0 ),
df
dx
d
f(x(t))
=
·
dt
dx
dt
t=t0
x=x(t0 )
t=t0
= ∇f(x(t0 )) · x ′ (t0 );
• Para x(t) e y(t) diferenciáveis em t = t0 e f(x, y) diferenciável em (x, y) = (x(t0 ), y(t0 )),
d
dx
dy
f(x(t), y(t))
·
= fx (x,y)=(x(t ),y(t )) ·
+
f
y
(x,y)=(x(t0 ),y(t0 )) dt 0
0
dt
dt t=t0
t=t0
t=t0
= ∇f(x(t0 ), y(t0 )) · (x ′ (t0 ), y ′ (t0 ));
• Em geral, para γ(t) com coordenadas diferenciáveis em t = t0 e f diferenciável em γ(t0 ),
d
f(γ(t))
= ∇f(γ(t0 )) · γ ′ (t0 ),
dt
t=t0
onde · representa o produto escalar de vetores.
3.2.8
Exemplo
x(t) = et e y(t) = ln t são diferenciáveis para todo t ∈ (0, ∞) e f(x, y) = ey ln x é diferenciável
para todo (x, y) ∈ (0, ∞) × R. Por um lado, de f(x(t), y(t)) = eln t ln et = t · t = t2 temos
y(t)
d
f(x(t), y(t)) = 2t. Por outro lado, como x ′ (t) = et , y ′ (t) = 1/t, fx (x(t), y(t)) = ex(t) =
que dt
eln t
et
′
= ett e fy (x(t), y(t)) = ey(t) ln x(t) = eln t ln et = t2 , temos também que ∇f(x(t), y(t)) ·
(x (t), y ′ (t)) = ett · et + t2 · 1t = 2t.
3.2.9
Consequências da Regra da Cadeia
(C1 ) Derivada de f no Ponto P0 e na Direção do Versor ~u:
∂f(P0 )
∂~
u
= f~u (P0 ) = ∇f (P0 ) · ~u
Exemplo
Se P0 ∈ R3 e ~u ∈ ~i,~j, ~k , então f~u (P0 ) ∈ {fx (P0 ) , fy (P0 ) , fz (P0 )}. Por exemplo, a derivada
de f na direção de ~i é dada por f~i (P0 ) = (fx (P0 ) , fy (P0 ) , fz (P0 )) · (1, 0, 0) = fx (P0 ). Em geral,
√
sendo ~u = a~i + b~j + c~k tal que a2 + b2 + c2 = 1, então
∂f (P0 )
∂f (P0 )
∂f (P0 )
∂f (P0 )
=a
+b
+c
.
∂~u
∂x
∂y
∂z
66
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
Exercı́cio
Obter a derivada da função dada, no ponto dado e na direção dada. (Dica: Normalize a
direção.)
1. f(x, y, z) = ex cos(yz), P0 = (0, 0, 0), ~v = (2, 1, −2);
2. f(x, y, z) = xy + yz + zx, P0 = (1, 1, 2), ~v = (10, −1, 2).
Pergunta: Por que f~u (inclusive fx , fy e fz ) representa (de fato) uma derivada?
“Justificativa” da Fórmula para a Derivada Direcional
Para definir Derivadas Direcionais é necessário o conceito de Limites!
f~u (P0 ) é obtida da regra da cadeia, considerando uma curva parametrizada γ(t) tal que γ (t0 ) =
P0 e γ ′ (t0 ) = ~v 6= ~0. (Veja Figura 3.1.) De fato, se ~u = ||~~vv|| ,
1111111
0000000
0000000
1111111
0000000
1111111
0000000
1111111
θ
0000000
1111111
∇f(P
0)
0000000
1111111
0000000
1111111
0000000
1111111
γ ′ (t0 )
0000000
1111111
0000000
1111111
||γ ′ (t0 )||
0000000
1111111
000000000
111111111
0000000
1111111
000000000
111111111
0000000
1111111
000000000
111111111
0000000
1111111
000000000
111111111
0000000
1111111
000000000
111111111
0000000
1111111
000000000
111111111
0000000
1111111
000000000
111111111
0000000
1111111
000000000
111111111
0000000
1111111
000000000
111111111
0000000
1111111
000000000
111111111
0000000
1111111
000000000
111111111
00
11
0000000
1111111
000000000
111111111
00
11
00
11
~
=u
γ(t0 ) = P0
γ(t)
1
0
0
1
0
1
~ =
Figura 3.1: Note ainda que, como proj~v w
~ ·~v
w
~v
||~v||2
~ sobre ~v 6= ~0, o
é a projeção ortogonal de w
módulo da derivada de f no ponto P0 = γ (t0 ) e na direção de ~u =
γ ′ (t0 )
||γ ′ (t
0 )||
é igual ao módulo
γ ′ (t0 ) ′
da projeção ortogonal de ∇f (γ (t0 )) sobre ~v = γ (t0 ), isto é, é igual a ∇f (γ (t0 )) · ||γ ′ (t0 )|| =
||∇f (γ (t0 )) || | cos θ|.
Logo
∂f(P0 )
∂~
u
~v
d
= ||~v|| · f~u (P0 ).
f(γ(t))
= ∇f(P0 ) · ~v = ||~v|| ∇f(P0 ) ·
dt
||~v||
t=t0
é simplesmente um múltiplo da derivada
d
f(γ(t))t=t .
dt
0
A próxima consequência da Regra da Cadeia interpreta ∂f/∂~u como ‘taxa de variação’.
3.2. CONTINUIDADE E DIFERENCIABILIDADE
67
(C2 ) Em sendo não nulo, ∇f (P0 ) (respectivamente, −∇f (P0 )) aponta na direção na
qual f cresce (respectivamente, decresce) mais rapidamente
0)
= ||∇f (P0 ) || · ||~u|| · cos θ, onde θ ∈
De fato, da fórmula do produto interno, temos que ∂f(P
∂~
u
[0, π] é o ângulo entre os vetores envolvidos. (Confira a Figura 3.1.) Daı́, como ||~u|| = 1 e
−1 ≤ cos θ ≤ 1, temos que
−||∇f (P0 ) || ≤ ||∇f (P0 ) || cos θ ≤ ||∇f (P0 ) ||,
isto é, ||∇f (P0 ) || é o maior valor de
0)
, ocorrendo para θ = π.
de ∂f(P
∂~
u
∂f(P0 )
,
∂~
u
ocorrendo para θ = 0, e −||∇f (P0 ) || é o menor valor
Exemplo
A partir do ponto (0, 1), em que direção f(x, y) = x2 − y2 cresce maisrapidamente?
De ∇f(x, y) = (2x, −2y), temos ∇f(0, 1) = (0, −2) = −2~j. Daı́ f cresce mais rapidamente a
partir de (0, 1) na direção −~j.
Exercı́cio
Achar a direção na qual a função z = x2 + xy cresce mais rapidamente noponto (−1, 1). Qual
é a norma de ∇z nesse ponto e como podemos interpretar tal valor?
(C3 ) Para P0 ∈ R3 , ∇f (P0 ) é normal a superfı́cie f(x, y, z) = constante = f (P0 )
De fato, sem perda de generalidade, considere ∇f (P0 ) 6= ~0. Agora, seja γ(t) uma curva
parametrizada sobre a superfı́cie f(x, y, z) = constante, isto é, f(γ(t)) = constante. Por fim,
suponha que tal curva passa por P0 em t = t0 , isto é, γ(t0 ) = P0 , e que ~v = γ ′ (t0 ). (Veja
Figura 3.2.) Daı́, resulta da regra da cadeia que
∇f (P0 ) · ~v = ∇f (γ (t0 )) · γ ′ (t0 )
d
= f(γ(t))
dt
t=t0
d
= (constante)
dt
t=t0
= 0,
isto é, ∇f(P0 ) é perpendicular a ~v. Analogamente, para outra curva sobre a mesma superfı́cie
~ , temos que
e que também passa por P0 num dado instante, agora com vetor velocidade w
~ . Daı́, ∇f (P0 ) é normal ao plano gerado pelos vetores ~v e w
~ . Como tais vetores
∇f (P0 ) ⊥ w
são tangentes a superfı́cie em P0 , tal plano também é tangente a superfı́cie em P0 .
Exemplo
Qual é a√equação
√ do√plano tangente a esfera de centro na origem e raio unitário no ponto
P0 = (1/ 3, 1/ 3, 1/ 3)?
Resolução:
Já vimos que tal plano é dado pela equação x + y + z −
√
3 = 0 . De fato, se f(x, y, z) =
68
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
∇f(P0 )
~
w
~
v
P0
γ(t)
~, a
Figura 3.2: ∇f(P0 ) é perpendicular ao plano gerado por vetores tangentes, digamos ~v e w
curvas em P0 .
x2 + y2 + z2 = 1 = f (P0 ) e ∇f (x0 , y0 , z0 ) = (2x0 , 2y0 , 2z0 ) =
√2 , √2 , √2
3
3
3
, então tal plano é
dado pela equação √23 · x + √23 · y + √23 · z + d = 0. Para determinarmos d, note que P0 é um
ponto deste plano. Daı́, basta substituir d = −3 · √23 · √13 = −2 na equação anterior.
Exercı́cios
1. Verificar√que o vetor normal unitário a superfı́cie x3 y3 + y − z + 2 = 0 em (0, 0, 2) é
~ = (1/ 2)(~j − ~k).
n
2. Obter o vetor normal unitário a superfı́cie cos(xy) = ez − 2 em (1, π, 0).
3. Obter o plano tangente e a reta normal ao hiperbolóide x2 + y2 − z2 = 18 em (3, 5, −4).
Segue de (C3 ) que,
se F(x, y, z) = f(x, y)−z com f(x, y) diferenciável em (x0 , y0 ), então o plano tangente a superfı́cie
F(x, y, z) = 0 em P0 = (x0 , y0 , f (x0 , y0 )) tem vetor normal dado por
(Fx (P0 ) , Fy (P0 ) , Fz (P0 )) = (fx (x0 , y0 ) , fy (x0 , y0 ) , −1) .
Assim a equação do plano tangente a tal superfı́cie em P0 é dada por
fx (x0 , y0 ) x + fy (x0 , y0 ) y + (−1)z + d = 0.
Como P0 pertence a tal plano, basta agora substituir
d = −fx (x0 , y0 ) x0 − fy (x0 , y0 ) y0 − (−1)f (x0 , y0 )
3.2. CONTINUIDADE E DIFERENCIABILIDADE
69
na equação anterior para obter a equação
fx (x0 , y0 ) · (x − x0 ) + fy (x0 , y0 ) · (y − y0 ) + (−1) · (z − f (x0 , y0 )) = 0
do plano tangente ao gráfico de z = f(x, y) no ponto P0 .
(C4 ) Outra Regra da Cadeia
Se x = x(u, v) e y = y(u, v) são diferenciáveis em (u, v) = (u0 , v0 ) e z = f(x, y) é diferenciável em (x, y) = (x(u0 , v0 ), y(u0 , v0 )), então z = f(x(u, v), y(u, v)) é diferenciável em
(u, v) = (u0 , v0 ) e, nesse ponto,
1.
∂z
∂u
=
∂z ∂x
∂x ∂u
+
∂z ∂y
,
∂y ∂u
2.
∂z
∂v
=
∂z ∂x
∂x ∂v
+
∂z ∂y
.
∂y ∂v
Vamos demonstrar tal resultado apenas para ∂z/∂u, mas antes, vamos verificá-lo para z =
2
2 4
ex sen y, x = uv2 e y = u2 v. Como z = eu v sen(u2 v), temos pela regra da derivada do
produto que
2 4
2 4
zu = 2uv4 eu v sen(u2 v) + eu v 2uv cos(u2 v).
2
2 4
2
2 4
Por outro lado, como zx = 2xex sen y = 2uv2 eu v sen(u2 v), zy = ex cos y = eu v cos(u2 v),
xu = v2 e yu = 2uv, temos que zx xu + zy yu = zu .
Agora a demonstração:
Fixe v = v0 . Sejam as funções reais apenas da variável real u dadas por X(u) = x(u, v0 ) e
Y(u) = y(u, v0 ). Daı́ podemos usar a Regra da Cadeia para z = f(X(u), Y(u)) em u = u0 :
d
f(X(u), Y(u))
= ∇f (X(u0 ), Y(u0 )) · (X ′ (u0 ), Y ′ (u0 )) .
du
u=u0
Isto equivale a zu = zx xu + zy yu em (u, v) = (u0 , v0 ).
Exercı́cio
Calcular ∂z/∂x e ∂z/∂y para
z=
u2 + v2
, u = e−x−y e v = exy ,
u2 − v2
das seguintes maneiras:
1. Substituindo e calculando diretamente;
2. Utilizando a Regra da Cadeia.
70
3.3
3.3.1
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
Otimização
Pontos Crı́ticos; Máximos e Mı́nimos
Um ponto de máximo (respectivamente, mı́nimo) local, P0 , pertencente ao domı́nio de uma
função, f, tem a maior (respectivamente, menor) imagem por f, f (P0 ), quando comparada com
imagens por f de pontos arbitrariamente próximos a P0 , isto é, pontos pertencentes a alguma
bola aberta de centro P0 e raio tão pequeno quanto se queira.
(O1 ) Se f tem máximo (respectivamente, mı́nimo) local num ponto interior ao seu
domı́nio onde exista o gradiente ∇f, então tal ponto é crı́tico, isto é, ∇f = 0 em tal
ponto.
Por exemplo, na figura 3.3, considere que Pi = (xi , f(xi )) pertence ao gráfico de uma função
real f de uma variável real, i = 0, . . . , 6.3 Embora as abcissas de ı́ndices pares sejam pontos de
máximo locais e as de ı́ndices ı́mpares sejam pontos de mı́nimo locais, apenas x1 , x2 e x5 são
interiores ao domı́nio de f com derivadas nulas: x0 e x6 não são interiores, enquanto que f ′ (x3 )
e f ′ (x4 ) não existem.
P6
P0
P4
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
00000000
11111111
P2
P5
P3
P1
Figura 3.3: Somente as abcissas dos Pi ’s interiores ao Dom (f) e onde existam derivadas são
pontos crı́ticos.
A seguir, exemplificaremos a validade de tal resultado para funções reais de várias variáveis
reais. Contudo, a recı́proca de (O1 ) não é verdadeira nem mesmo para funções de uma variável
real. Para f(x) = x3 , por exemplo, x = 0 é um ponto interior com f ′ (0) = 3 · 02 = 0, mas não é
ponto de máximo local nem de mı́nimo local. Um ponto como este é dito um Ponto de Sela.4
Y
0
f(x) = x3
X
3
Este exemplo já foi apresentado no primeiro capı́tulo. Encontra-se aqui para um estudo comparado e/ou
para aqueles que dispensaram a leitura do primeiro capı́tulo!
4
Idem!
3.3. OTIMIZAÇÃO
71
(O1 ′ ) ‘Candidatos’ a Pontos (Interiores) de Máximo ou Mı́nimo Locais onde exista
o Gradiente: Pontos onde o Gradiente seja Nulo!
Por exemplo, seja a função f(x, y) = x2 + y2 . Note primeiramente que todo ponto (x, y) ∈ R2
é interior a Dom(f) = R2 . Agora, embora possam existir pontos interiores que anulem o
gradiente de f e não sejam de máximo nem de mı́nimo locais (confira exemplo anterior), nossos
‘candidatos’ a pontos (interiores) de máximo ou mı́nimo locais existem entre aqueles que anulem
o gradiente.5 Assim, de ∇f = (2x, 2y) = (0, 0), temos apenas um tal ‘candidato’: (x, y) = (0, 0).
E, de fato, como f(x, y) = x2 + y2 ≥ 0 = f(0, 0) para todo (x, y) ∈ R2 , temos que (0, 0) é ponto
de mı́nimo Global para f. Ainda, como vimos no final da seção Definições, o gráfico de f é
um parabolóide com vértice na origem cujo eixo de revolução é o semi-eixo positivo das cotas.
(O2 ) Se f é Contı́nua num Domı́nio Compacto, então f tem Máximo e Mı́nimo
Globais neste Domı́nio.
A figura 3.4 representa dois exemplos para funções reais de uma variável real.
Figura 3.4: No primeiro gráfico, os pontos de máximo e mı́nimo globais ocorrem nos extremos
do intervalo compacto que representa o domı́nio da função. No segundo, os pontos de máximo
e mı́nimo globais são interiores ao intervalo compacto que representa o domı́nio da função.
Além dos exemplos anteriores, o resultado também é válido para funções reais de várias variáveis
reais, podendo ser aplicado para garantir a existência de pontos de máximo e mı́nimo globais
num domı́nio fechado e limitado. Por outro lado, se o domı́nio não for compacto, f pode não
admitir ponto de máximo ou de mı́nimo globais. Por exemplo: f(x) = ln x, definida para todo
x ∈ (0, ∞), não tem máximo nem mı́nimo globais. Outro exemplo: f(x, y) = x2 + y2 , definida
para todo (x, y) ∈ R2 , tem (0, 0) como ponto de mı́nimo global (confira exemplo anterior), mas
não tem ponto de máximo global pois f(x, y) pode se tornar tão grande quanto se queira!
Exemplo
Considere agora que o domı́nio da função f(x, y) = x2 + y2 contı́nua está restrito ao cı́rculo de
centro na origem e raio unitário, isto é,
Dom (f) = (x, y) ∈ R2 x2 + y2 ≤ 1 .
Por um lado, acabamos de ver que (0, 0) é o mı́nimo global de f. Por outro lado, é fácil ver que
todo ponto da circunferência unitária x2 + y2 = 1 é máximo global de f.
5
Isto é, por (O1 ), ponto interior onde exista gradiente não nulo, não é ponto de máximo nem de mı́nimo.
72
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
Exemplo
p
Seja f(x, y) = 1 − x2 − y2 . f é contı́nua e está definida (apenas) no cı́rculo de centro na
origem e raio unitário, isto é,
Dom (f) = (x, y) ∈ R2 x2 + y2 ≤ 1 .
Note que o gráfico de f é a semi-esfera superior de centro na origem e raio unitário. Logo, por
uma lado, (0, 0) é o máximo global de f pois
f(x, y) =
p
1 − (x2 + y2 ) ≤ 1 = f(0, 0) para todo (x, y) ∈ Dom (f).
Por outro lado, claramente, cada ponto da circunferência unitária x2 + y2 = 1 é mı́nimo global
de f.
Exemplo
Considere a função f(x, y) = xy(3 − x − y) = 3xy − x2 y − xy2 , que é contı́nua, com
Dom(f) = (x, y) ∈ R2 | x ≥ 0, y ≥ 0, x + y ≤ 3 ,
que é compacto, representado pelo triângulo (interior e fronteira) da figura seguinte.
Y
3
x+y=3
x=0
Dom(f)
0
y=0
3
X
Daı́ (O2 ) nos diz que f admite pontos de máximo e mı́nimo globais em Dom(f). Agora, (O1 ′ )
acarreta que, para pontos interiores, os candidatos a pontos de máximo e mı́nimo são obtidos
via as seguintes equações:
fx = 3y − 2xy − y2 = 0,
fy = 3x − 2xy − x2 = 0.
Uma solução é imediata: O = (0, 0), que não é interior!
Outras duas soluções, P1 = (3, 0) e P2 = (0, 3), que não são interiores, seguem de:
• x = 0 e y 6= 0 ⇒ 3 − y = 0, isto é, y = 3;
• x 6= 0 e y = 0 ⇒ 3 − x = 0, isto é, x = 3.
3.3. OTIMIZAÇÃO
73
Agora sendo x e y diferentes de zero, podemos dividir fx = 0 por y e fy = 0 por x, resultando
em
3 − 2x − y = 0,
3 − 2y − x = 0,
isto é,
2x + y = 3,
x + 2y = 3.
Resolvendo tal sistema, temos x = y = 1. Assim, temos um último candidato para ponto
(interior) de máximo/mı́nimo: P3 = (1, 1).
Por um lado, note agora que todos os pontos da fronteira de Dom(f) (inclusive O, P1 e P2 )
anulam a função f, isto é, satisfazem a equação f(x, y) = 0. De fato, x = 0, y = 0 e x + y = 3
anulam f(x, y) = xy(3 − x − y). (Por exemplo, f(0, 0) = f(3, 0) = f(0, 3) = 0.) Então,
como f(P3 ) = 1, nenhum ponto da fronteira pode ser ponto de máximo global. Logo tal
máximo pertence ao interior de Dom(f). Mas, por (O1 ′ ), temos que pontos de máximo (locais)
interiores a Dom(f) devem anular o gradiente. Ora, o único ponto interior que anula o gradiente
é P3 , sendo este então o máximo global. Por outro lado, não há ponto de mı́nimo interior ao
domı́nio.6 Ainda, por (O2 ), deve existir ponto de mı́nimo no domı́nio. A conclusão desses dois
fatos é que o mı́nimo global pertence a fronteira do domı́nio. Como todos os pontos da fronteira
têm a mesma imagem (nula) por f, todos eles são pontos de mı́nimo globais!
3.3.2
Teste da Derivada Segunda; Multiplicadores de Lagrange
(O3 ) Teste da Derivada Segunda para:
(O3.1 ) y = f(x)
Se a derivada de segunda ordem de f é contı́nua num intervalo aberto com centro no ponto
crı́tico x0 , então a tabela seguinte é válida.
f ′′ (x0 )
x0
>0
mı́nimo local
<0
máximo local
Note que todos os pontos de um intervalo aberto são interiores ao mesmo.
(O3.2 ) z = f(x, y)
Se as derivadas parciais de segunda ordem são contı́nuas numa bola aberta de centro no ponto
crı́tico (x0 , y0 ) e H := fxx fyy − (fxy )2 , então a tabela seguinte é válida.
H (x0 , y0 ) fxx (x0 , y0 )
(x0 , y0 )
>0
>0
ponto de mı́nimo local
>0
<0
ponto de máximo local
<0
≥ 0 ou < 0
ponto de sela
=0
≥ 0 ou < 0
teste inconclusivo
Note que todos os pontos de uma bola aberta são interiores a mesma.
6
De fato, eventuais pontos (interiores) de mı́nimo anulariam o gradiente e apenas quatro pontos anulam o
mesmo. Três deles, O, P1 e P2 , estão na fronteira e o que está no interior, P3 , é máximo global.
74
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
Exemplo
Vimos no Exemplo anterior que (1, 1) é o único ponto interior ao Dom(f) que anula o gradiente
de f(x, y) = xy(3 − x − y), onde fx = 3y − 2xy − y2 e fy = 3x − 2xy − x2 . Agora, como
fxx = −2y, fyy = −2x e fxy = 3 − 2x − 2y, temos que fxx (1, 1) = −2 < 0 e H(1, 1) =
fxx (1, 1)fyy (1, 1) − (fxy (1, 1))2 = (−2)(−2) − (−1)2 = 3 > 0. Daı́, pela tabela apresentada em
(O3.2 ), (1, 1) é ponto de máximo local. Logo, devido a não existirem outros pontos interiores
ao Dom(f) que anulem o gradiente,7 f(1, 1) = 1 e, como visto naquele Exemplo, cada um
dos pontos pertencentes a fronteira de Dom(f) anular f, temos que (1, 1) é o ponto de máximo
global.
(O4 ) Multiplicadores de Lagrange com:
(O4.1 ) Uma Restrição
Para determinar o valor máximo (respectivamente, mı́nimo) de f(x, y) para (x, y) satisfazendo
a restrição g(x, y) = k, supondo que esse valor exista e que ∇g 6= ~0 para tais (x, y), proceda
do modo seguinte:
1. Determine todos os (x, y) (e λ) tais que:
(a) ∇f(x, y) = λ∇g(x, y);
(b) g(x, y) = k;
2. Calcule f(x, y) para todos os (x, y) obtidos no ı́tem anterior: o maior (respectivamente,
menor) valor de f será o seu máximo (respectivamente, mı́nimo).
Vale um resultado análogo para funções reais de três variáveis reais (x, y, z).
Exercı́cio
Em existindo, obtenha as dimensões de uma caixa retangular sem tampa, de modo que ela
tenha um dado volume V e área mı́nima.
Resolução via Multiplicadores de Lagrange:
Sendo f(x, y, z) = xy+2xz+2yz e g(x, y, z) = xyz a área e o volume da caixa, respectivamente,
onde x, y e z são positivos, devemos minimizar f(x, y, z) para g(x, y, z) = V u.v. constante. De
fx = λgx , fy = λgy e fz = λgz , obtemos y + 2z = λyz, x + 2z = λxz e 2x + 2y = λxy. Para
estas três últimas equações, multiplique a primeira por x, a segunda por y e a terceira por z,
obtendo daı́ xy + 2xz = xy + 2yz = 2xz + 2yz. Em relação a estas duas igualdades anteriores,
da primeira obtemos xz = yz e da segunda
obtemos xy = 2xz, isto é, x = y = 2z. Daı́, como
p
3
3
xyz = V, temos 4z = V, isto é, z = V/4,
que pode p
ser racionalizado
(multiplicando tanto
√
√
3
3
3
o numerador quanto o denominador por 2) em z = 2V/8
= 2V/2 u.c.. Segue daı́ que
√
√
√
√
3
3
3
3
2V, 2V, 2V/2 é, de fato, ponto de mı́nimo (e
x = y = 2V u.c.. (Para confirmar que
não de máximo) para f, considere outro ponto que satisfaça xyz = V e compare as imagens dos
dois pontos por f. Por exemplo,
√
√
√
√
3
3
3
3
f
2V, 2V, 2V/2 = 3 4V 2 e f(1, 1, V) = 1 + 4V.
7
Assim, não podem existir outro ponto de máximo local nem algum ponto de mı́nimo local interiores a tal
domı́nio!
3.3. OTIMIZAÇÃO
75
√
3
Segue daı́ que 3 4V 2 < 1 + 4V pois, caso contrário,
√
3
3 4V 2 ≥ 1 + 4V ⇒ 33 · 4V 2 ≥ 13 + 3 · 12 · 4V + 3 · 1 · (4V)2 + (4V)3
⇒ 108V 2 ≥ 1 + 12V + 48V 2 + 64V 3
⇒ 64V 3 − 60V 2 + 12V + 1 ≤ 0,
que é algo absurdo para V > 0.)
Resolução via Teste da Derivada Segunda:
V
u.c.. Substituindo tal z na área
Sendo x, y e z positivos, de xyz = V u.v., temos que z = xy
(variável) da caixa dada por xy + 2xz + 2yz, obtemos a função nas variáveis x e y dada por
f(x, y) = xy+ 2V
+ 2V
. Assim, de fx = y− 2V
= 0 e fy = x− 2V
= 0, temos que x2 y = xy2 = 2V.
y
x
x2
y2
√
, fyy = 4V
Então o ponto crı́tico (x, y) de f tem x = y = 3 2V u.c.. Agora, como fxx = 4V
x3
y3
√
√
√
√
3
3
3
3
2
e√fxy =√1, temos que fxx ( 2V, 2V) = 2 > 0 e H( 2V, 2V) = 2 · 2 − 1 = 3 > 0. Logo
( 3 2V, 3 2V) é ponto de mı́nimo local para f. Por outro lado, como Dom(f) = (0, ∞) × (0, ∞),
isto é, tal domı́nio é representado pelo primeiro quadrante
sem√os semi-eixos coordenados,8 e
√
o único ponto do Dom(f) que anula o gradiente
de f é ( 3 2V, 3 2V),9 tal ponto é de mı́nimo
√
3
2V
V
global. Por fim, calcula-se z = √
u.c..
2 =
3
2
2V
(O4.2 ) Duas Restrições
Para determinar o valor máximo (respectivamente, mı́nimo) de f(x, y, z) para (x, y, z) satisfazendo as restrições g(x, y, z) = k1 e h(x, y, z) = k2 , supondo que esse valor exista e que ∇g e
∇h não se anulem e não sejam paralelos entre si para tais (x, y, z), proceda do modo seguinte:
1. Determine todos os (x, y, z) (e (λ, µ)) tais que:
(a) ∇f(x, y, z) = λ∇g(x, y, z) + µ∇h(x, y, z);
(b) g(x, y, z) = k1 ;
(c) h(x, y, z) = k2 ;
2. Calcule f(x, y, z) para todos os (x, y, z) obtidos no ı́tem anterior: o maior (respectivamente, menor) valor de f será o seu máximo (respectivamente, mı́nimo).
Exemplo
Sendo f(x, y, z) = x + y + z, ache o máximo e o mı́nimo de f restrita à interseção do plano
x + y − z = 1 com o cilindro y2 + z2 = 4.
Resolução:
Tal interseção é uma elipse, que é um conjunto compacto, em R3 . Logo a função contı́nua f
admite máximo e mı́nimo em tal interseção por (O2 ). Daı́, considerando g(x, y, z) = x + y − z
e h(x, y, z) = y2 + z2 , temos o sistema
(1, 1, 1) = λ(1, 1, −1) + µ(0, 2y, 2z),
8
9
g(x, y, z) = 1 e h(x, y, z) = 4.
Daı́ todos os pontos deste domı́nio são interiores ao mesmo.
Assim, por (O1 ), não existe outro ponto de mı́nimo local interior ao Dom(f).
76
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
Da primeira equação do sistema anterior, segue que λ = 1, λ + 2µy = 1 e −λ + 2µz = 1. Daı́
µy = 0 e µz = 1. Logo y = 0 e, como y2 + z2 = 4 e x + y − z = 1,10 temos z = ±2 e x ∈ {−1, 3}.
Assim f(−1, 0, −2) = −3 é o valor mı́nimo e f(3, 0, 2) = 5 é o valor máximo.
Exercı́cios
1. Proceda como no exemplo anterior, mas agora com f(x, y, z) = x − y − z e as funções g
e h dadas nos primeiros membros de x + y + z = 2 e x2 + y2 = 4.
2. Este é similar ao anterior mas com f(x, y, z) = 2x − y + 4z e as funções g e h obtidas a
partir de x2 + 3y2 = 84 e z = x.
3. Obter o ponto pertencente aos planos x + 2y + 3z = 8 e z = x mais próximo da origem.
10
Veja as duas últimas equações do sistema anterior.
3.4. FORMULÁRIO - CÁLCULO DIFERENCIAL
3.4
77
Formulário - Cálculo Diferencial
Fórmulas válidas no contexto anterior. Para n = 2, (x1 , . . . , xn ) = (x, y). Para n = 3, (x1 , . . . , xn ) = (x, y, z).
• Vetores:
– Posição em t: γ(t) = (x1 (t), . . . , xn (t));
– Velocidade em t: γ ′ (t) = (x1′ (t), . . . , xn′ (t));
– Aceleração em t: γ ′′ (t) = (x1′′ (t), . . . , xn′′ (t));
– Gradiente em P = (x1 , . . . , xn ): ∇f(P) = (fx1 (P), . . . , fxn (P));
Pn
• Aproximação Linear: f(x1 , . . . , xn ) ≈ f(x10 , . . . , xn0 ) + i=1 fxi (x10 , . . . , xn0 )∆xi , |xi − xi0 | = |∆xi | ≪ 1;
d
f(γ(t))t=t = ∇f(γ(t0 )) · γ ′ (t0 );
• Regra da Cadeia: dt
0
0)
• Derivada em P0 na Direção do Versor ~u: ∂f(P
= ∇f(P0 ) · ~u = ∇f(P0 ) cos θ, θ ângulo entre ∇f(P0 ) e ~u;
∂~
u
n
• ∇f(P0 ) ⊥ S com S = (x1 , . . . , xn ) ∈ R f(x1 , . . . , xn ) = f(P0 ) ;
• Regra da Cadeia para z = f(x(u, v), y(u, v)):
∂z
∂u
=
∂z ∂x
∂x ∂u
+
∂z ∂y ∂z
∂y ∂u , ∂v
=
∂z ∂x
∂x ∂v
+
∂z ∂y
∂y ∂v ;
• Se f tem máximo/mı́nimo local num ponto interior ao seu domı́nio e existe o gradiente ∇f nesse ponto, então
tal ponto é crı́tico, isto é, em tal ponto ∇f = 0;
• f é contı́nua e Dom(f) é compacto ⇒ f tem ponto de máximo e ponto de mı́nimo em Dom(f);
• Teste da Derivada de Segunda Ordem para f(x, y):
H (x0 , y0 )
>0
>0
<0
=0
fxx (x0 , y0 )
>0
<0
≥ 0 ou < 0
≥ 0 ou < 0
(x0 , y0 )
mı́nimo local
máximo local
sela
?
sendo H = fxx fyy − (fxy )2 e (x0 , y0 ) ponto crı́tico interior ao Dom(f);
• Multiplicadores de Lagrange com Uma Restrição:
Para determinar o valor máximo/mı́nimo de f(x, y) para (x, y) satisfazendo a g(x, y) = k, supondo que
esse(s) valor(es) exista(m) e que ∇g 6= 0 para esses (x, y):
– determine todos os (x, y) (e λ) tais que:
∗ ∇f(x, y) = λ∇g(x, y);
∗ g(x, y) = k;
– calcule f(x, y) para todos os (x, y) obtidos no ı́tem anterior: o maior/menor valor de f será o seu
máximo/mı́nimo.
Vale um resultado análogo para funções reais de três variáveis reais (x, y, z).
• Multiplicadores de Lagrange com Duas Restrições: Para determinar o valor máximo/mı́nimo de f(x, y, z) para
(x, y, z) satisfazendo a g(x, y, z) = k1 e h(x, y, z) = k2 , supondo que esse(s) valor(es) exista(m) e que ∇g
e ∇h não se anulem e não sejam paralelos entre si para tais (x, y, z):
– determine todos os (x, y, z) (e (λ, µ)) tais que:
∗ ∇f(x, y, z) = λ∇g(x, y, z) + µ∇h(x, y, z);
∗ g(x, y, z) = k1 ;
∗ h(x, y, z) = k2 ;
– calcule f(x, y, z) para todos os (x, y, z) obtidos no ı́tem anterior: o maior/menor valor de f será o seu
máximo/mı́nimo.
78
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
3.5
Exercı́cios - Cálculo Diferencial
3.5.1
Curvas Parametrizadas
1. Determine os pontos em que a curva γ(t) = (t3 −1, t2 +1, 3t) corta o plano 3x−2y−z+7 =
0.
Resolução:
Para a curva interceptar o plano, temos que x(t) = t3 − 1, y(t) = t2 + 1 e z(t) = 3t
devem satisfazer 3x − 2y − z + 7 = 0. Daı́ 3t3 − 2t2 − 3t + 2 = 0, cujas raı́zes são ±1 e
2
. Logo os pontos de interseção são γ(−1) = (−2, 2, −3), γ(2/3) = (−19/27, 13/9, 2) e
3
γ(1) = (0, 2, 3).
3
2. A curva R ∋ t 7→ γ(t) = t, t2 , t 5−1 ∈ R3 representa o movimento de um corpo. Em
t = 1 u.t. o corpo se desprende da curva e continua seu movimento sem forças atuando
sobre ele. Determine o ponto e o instante no qual o corpo atinge o plano x + y + z = 10.
Primeira Resolução:
O corpo se desprende da curva no ponto P0 = γ(1) = (1, 1, 0) (veja figura 3.5). Nesse
P
P0
Figura 3.5: Corpo ‘sai’ pela tangente a curva no ponto P0 e colide no plano no ponto P.
instante (t = 1 u.t. para a curva γ(t)), como R ∋ t 7→ γ ′ (t) = 1, 2t, 35 t2 ∈ R3 , o seu
vetor velocidade é dado por ~v = γ ′ (1) = (1, 2, 3/5). Daı́ o corpo ‘sai’ pela (reta) tangente
a curva dada por R ∋ t 7→ r(t) = P0 + t~v = 1 + t, 1 + 2t, 35 t ∈ R3 . (Note que P0 é obtido para t = 0 como ponto da reta, isto é, r(0) = P0 . Daı́ ao instante em que o corpo
atingir o plano acrescentamos uma unidade de tempo.) Sobre a reta, no instante t u.t. em
que o corpo atinge o plano, as coordenadas de r(t) satisfazem a equação x + y + z = 10,
isto é, 1 + t + 1 + 2t + 53 t = 10. Daı́ 18t = 40, isto é, t = 209 = 2, 2 u.t. é o instante em
que o corpo atinge o plano, visto como uma partı́cula que estivesse em movimento sobre
a reta durante todo tempo
t. Assim, 3,
2 u.t. é o exato instante do impacto e isso ocorre
6,6
no ponto P = r 2, 2 = 3, 2, 5, 4, 5 .
Segunda Resolução:
Considerando qualquer curva parametrizada γ(t) que seja derivável em t = t0 , a equação
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
79
da reta que passa pelo ponto P0 = γ(t0 ) no instante t = t0 u.t. (não no instante t = 0
u.t.) na direção do vetor ~v = γ ′ (t0 ) é dada por R ∋ t 7→ r(t) = P0 + (t − t0 )~v ∈ R3 . No
nosso exemplo, como o corpo se desprende da curva em t = t0 = 1 u.t., temos
3
r(t) = (1, 1, 0) + (t − 1)(1, 2, 3/5) = t, 2t − 1, (t − 1) .
5
Daı́, ao contrário da Primeira Resolução, existe uma sincronização de tempo entre a
curva e a reta, não sendo necessário acrescentar unidades de tempo ao tempo transcorrido
ao longo da reta. Assim, quando r(t) atinge o plano x + y + z = 10 temos t + 2t − 1 +
3
(t − 1) = 10, isto é, 18t = 58. Daı́ t = 29
= 3, 2 u.t. é o instante do impacto com o
5
9
plano e isto ocorre no ponto P = r 3, 2 = 3, 2, 5, 4, 6,6
.
5
3. Suponha que uma partı́cula siga pela trajetória γ(t) = (et , e−t , cos t) até sair pela tangente no instante t = 1 u.t.. Onde estará a partı́cula no instante t = 3 u.t.?
Resolução:
O vetor velocidade é γ ′ (t) = (et , −e−t , −sen t), que no instante t = 1 u.t. é o vetor
~v = (e, −1/e, −sen 1). A partı́cula está em P0 = (e, 1/e, cos 1) no instante t = 1 u.t..
Daı́
t
2
a equação da reta tangente é r(t) = P0 +(t−1)~v = et, − e + e , cos 1 − (t − 1) sen 1 (confira a Segunda Resolução do exercı́cio anterior). Daı́ no instante t = 3 u.t. a posição
sobre a reta é dada por r(3) = (3e, −1/e, cos 1 − 2 sen 1) ≈ (8, 155, −0, 368, −1, 143).
4. Sendo γ(t) uma curva parametrizada com coordenadas diferenciáveis tal que ||γ(t)|| = c
constante para todo t pertencente a algum intervalo aberto I, prove (usando a Regra da
Derivada do Produto Escalar) que γ(t) ⊥ γ ′ (t) para todo t ∈ I.
Resolução:
p
Basta derivar γ(t) · γ(t) = c, isto é, γ(t) · γ(t) = c2 , obtendo-se 2γ(t) · γ ′ (t) = 0.11
5. Sendo γ(t) uma curva parametrizada com coordenadas diferenciáveis, definida num intervalo aberto, cujo traço está sobre uma esfera de centro na origem e raio r, prove que
γ(t) ⊥ γ ′ (t) paratodo t pertercente a tal intervalo.
Resolução:
Como ||γ(t)|| = r, basta aplicar a questão anterior.
3.5.2
Continuidade e Diferenciabilidade
√
3xy2 +(log 2)x3 y3 +x2 +y+cos
1. z = e
2π
7
é uma função contı́nua? (Justifique a sua resposta!)
Resolução:
Funções constantes tais como
cte1 (x, y) =
11
√
3, cte2 (x, y) = log 2 e cte3 (x, y) = cos
~ ⇔ ~u · w
~ = 0.
Via Geometria Analı́tica ou Álgebra Linear, temos que: ~u ⊥ w
2π
,
7
80
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
bem como as funções não constantes
p1 (x, y) = x e p2 (x, y) = y,
são contı́nuas pois seus gráficos são planos e daı́ não têm ‘buracos’ ou ‘saltos’.
Como o produto de funções contı́nuas é uma função contı́nua, são contı́nuas as funções
√
f1 (x, y) = 3xy2 , f2 (x, y) = (log 2)x3 y3 e f3 (x, y) = x2 .
Como a soma de funções contı́nuas é uma função contı́nua, é contı́nua a função
f(x, y) =
√
3xy2 + (log 2)x3 y3 + x2 + y + cos
2π
.
7
Finalmente, devido a composição de funções contı́nuas (quando for possı́vel compor as
mesmas) ser uma função contı́nua, como g(t) = et é contı́nua para todo t ∈ R, então
√
z = g(f(x, y)) = ef(x,y) = e
3xy2 +(log 2)x3 y3 +x2 +y+cos
2π
7
é uma função contı́nua.
2. Para funções f(x, y, z) e g(x, y, z), cujas derivadas parciais de primeira ordem existam
num dado ponto, prove que ∇(fg) = f∇g + g∇f em tal ponto.
Resolução:
∂
∂
∂
(fg),
(fg), (fg) = (fx g + fgx , fy g + fgy , fz g + fgz )
∂x
∂y
∂z
= f(gx , gy , gz ) + g(fx , fy , fz ).
p
3. f(x, y) = ln( x2 + y2 ) satisfaz a equação fxx + fyy = 0?
Resolução:
Para facilitar as contas, escreva
f(x, y) =
1
· ln(x2 + y2 ).
2
Logo, pela Regra da Cadeia, temos que
fx =
x2
x
y
e fy = 2
.
2
+y
x + y2
Daı́, pela Regra da Derivada do Quociente, segue que
fxx =
cuja soma é zero.
1 · (x2 + y2 ) − y · 2y
1 · (x2 + y2 ) − x · 2x
e
f
=
,
yy
(x2 + y2 )2
(x2 + y2 )2
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
81
4. Seja f uma função de uma variável, diferenciável até a segunda ordem. Verifique que
z = f(x − ct) satisfaz a zxx − c12 ztt = 0, dita Equação das Ondas, onde c é uma constante.
Resolução:
Basta observar que, para y = x − ct , pela Regra da Cadeia para funções de uma variável,
df(y)
df(y) dy
df(y)
=
=
,
dx
dy dx
dy
df(y)
df(y) dy
df(y)
zt =
=
= −c
,
dt
dy dt
dy
d df(y) dy
d2 f(y)
d df(y)
=
=
e
zxx =
dx
dy
dy
dy
dx
dy2
df(y)
d df(y) dy
d2 f(y)
d
−c
= −c
= c2
.
ztt =
dt
dy
dy
dy
dt
dy2
zx =
√
2
5. Verifique que a função z = e−x /4kt / t satisfaz a zt = kzxx , dita Equação de Difusão
ou Equação do Calor, onde k é uma constante.
Resolução:
Segue das derivadas parciais
√
2
2
zt = ((x2 /4kt2 )e−x /4kt / t) + (e−x /4kt /(−2t3/2 ))
2
2
x
1
e−x /4kt
,
−
= √
4kt2 2t
t
√
2
zx = (−2x/4kt)e−x /4kt / t e
zxx =
3.5.3
(−1/2kt)e−x
2 /4kt
+ (−x/2kt)(−x/2kt)e−x
√
t
2 /4kt
.
Planos Tangentes, Aproximações Lineares e Regra da Cadeia
1. Onde o eixo das cotas intercepta o plano tangente ao gráfico de z = ex−y em P0 = (1, 1, 1)?
Resolução:
Sendo zx = ex−y e zy = −ex−y em (1, 1) dados, respectivamente, por 1 e −1, tal plano
tangente é dado por (x − 1) + (−1)(y − 1) + (−1)(z − 1) = 0. Este intercepta o eixo das
cotas quando x = y = 0, isto é, (−1) + (−1)(−1) + (−1)(z − 1) = 0. Daı́ (0, 0, 1) é o
ponto de interseção.
2. Ache a equação do plano tangente a superfı́cie z = 2x2 − 3xy + y2 que seja paralelo ao
plano 10x − 7y − 2z + 5 = 0.
Resolução:
Se f(x, y, z) = 2x2 −3xy+y2 −z, então ∇f = (fx , fy , −1) = (4x−3y, −3x+2y, −1) é normal
ao plano tangente a superfı́cie f(x, y, z) = 0 = f (P0 ) num ponto P0 = (x0 , y0 , z0 ) qualquer
desta superfı́cie. Contudo, não é dado o P0 que determina unicamente o plano a ser determinado. Por outro lado, como tal plano é paralelo ao plano 10x − 7y − 2z + 5 = 0, temos
82
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
que ∇f (P0 ) = λ(10, −7, −2), isto é, (4x0 − 3y0 , −3x0 + 2y0 , −1) = (10λ, −7λ, −2λ), isto
é,
4x0 − 3y0 = 10λ,
−3x0 + 2y0 = −7λ,
−1 = −2λ ⇒ λ = 21 .
Daı́ ∇f (P0 ) = (10/2, −7/2, −1) e
4x0 − 3y0 = 102 ,
−3x0 + 2y0 = − 27 .
Multiplicando a primeira equação de tal sistema por 3, a segunda por 4, e somando as
duas, temos que y0 = −1, x0 = 12 e z0 = 2(1/4) − 3(1/2)(−1) + 1 = 3. Assim, a equação
do plano procurado é dada por
(10/2) x + (−7/2) y + (−1)z + d = 0.
Como P0 satisfaz tal equação, basta agora substituir
10 1 7
d=−
· − · (−1) + (−1) · 3 = −3
2 2 2
na mesma para obter
(10/2) x + (−7/2) y + (−1)z − 3 = 0,
isto é, 10x − 7y − 2z − 6 = 0.
3. Verifique que: a curva espacial de equações paramétricas x = sen t, y = sen t e z = cos 2t
pertence a superfı́cie x2 + y2 + z = 1; a reta tangente a tal curva no ponto P0 em t = π/4
pertence ao plano tangente a tal superfı́cie neste ponto.
Resolução:
Sendo S = (x, y, z) ∈ R3 x2 + y2 + z = 1 a superfı́cie e γ(t) = (sen t, sen t, cos 2t) a
curva do enunciado, queremos verificar que γ(t) ∈ S, isto é, γ(t) satisfaz a equação
x2 + y2 + z = 1. De fato,
x(t)2 + y(t)2 + z(t) = sen2 t + sen2 t + cos 2t
= sen2 t + sen2 t + cos2 t − sen2 t
= 1.
√
√
Note agora que P0 = γ(π/4) =
2/2, 2/2, 0 . Daı́, sendo r(t) = P0 + ~vt a reta
tangente a curva γ(t) em P0 , como γ ′ (t) = (cos t, cos t, −2 sen 2t) e ~v = γ ′ (π/4), temos
!
√
√
√
√
2
2
2
2
r(t) =
+
t,
+
t, −2t .
2
2
2
2
Assim, seja Π o plano tangente a S em P0 , isto é, o plano de equação
√ !
√ !
2
2
+ fy (P0 ) y −
+ (−1)(z − 0) = 0
fx (P0 ) x −
2
2
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
83
com f(x, y) = 1 − x2 − y2 , isto é,
√ !
√ ! √ √
2
2
y−
+ − 2
+ (−1)z = 0.
− 2
x−
2
2
Queremos verificar que r(t) ∈ Π, isto é, r(t) satisfaz a equação anterior. De fato,
√ − 2
√ − 2
√
√
2
2
+
t−
2
2
√
√
2
2
+
t−
2
2
√ !
2
+
2
√ !
2
+
2
(−1)(−2t) =
−t − t + 2t =
0.
4. Aproxime linearmente uma função adequada f(x, y) e a partir dela estime:
(a) (0, 99e0,002 )8 ;
(b) (0, 99)3 + (2, 01)3 − 6(0, 99)(2, 01).
Resolução:
Sendo |x − x0 | = |∆x| ≪ 1 e |y − y0 | = |∆y| ≪ 1 (arbitrariamente pequenos), temos que
f(x, y) ≈ f(x0 , y0 ) + fx (x0 , y0 ) · ∆x + fy (x0 , y0 ) · ∆y.
(a) Sendo f(x, y) = (xey )8 , fx = 8(xey )7 ey , fy = 8(xey )8 , x = 0, 99, x0 = 1, ∆x = x − x0 =
−0, 01, y = 0, 002, y0 = 0 e ∆y = y − y0 = 0, 002, temos que
(0, 99e0,002 )8 = f(0, 99, 0, 002)
≈ f(1, 0) + fx (1, 0) · ∆x + fy (1, 0) · ∆y
≈ 1 + 8(−0, 01) + 8(0, 002)
≈ 0.936.
(Numa calculadora(0, 99e0,002 )8 ≈ 0.938. Daı́, o erro é aproximadamente 0, 002.)
(b) Sendo f(x, y) = x3 + y3 − 6xy, fx = 3x2 − 6y, fy = 3y2 − 6x, x = 0, 99, x0 = 1,
∆x = x − x0 = −0, 01, y = 2, 01, y0 = 2 e ∆y = 0, 01, temos que
(0, 99)3 + (2, 01)3 − 6(0, 99)(2, 01)7 = f(0, 99, 2, 01)
≈ f(1, 2) + fx (1, 2) · ∆x + fy (1, 2) · ∆y
≈ −3 + (−9)(−0, 01) + 6(0, 01)
≈ −2, 8500.
(Numa calculadora (0, 99)3 + (2, 01)3 − 6(0, 99)(2, 01) ≈ −2.8485. Daı́ o erro é aproximadamente 0, 0015.)
84
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
5. Considere um cilindro cujo raio mede cerca de 2 metros e cuja altura mede cerca de 3
metros. Determine a precisão das medidas do raio e da altura tal que o erro estimado
do volume via aproximação linear não exceda 0, 1 metros cúbicos. Considere ainda que o
possı́vel erro cometido ao se medir o raio seja igual ao possı́vel erro cometido ao se medir
a altura.
Resolução:
V(r, h) = πr2 h é o volume do cilindro de raio r e altura h. Suas derivadas parciais são
dadas por Vr = 2πrh e Vh = πr2 . Assim, queremos usar a aproximação linear
V(r0 + ∆r, h0 + ∆h) ≈ V(r0 , h0 ) + Vr (r0 , h0 ) · ∆r + Vh (r0 , h0 ) · ∆h
sendo r0 = 2, h0 = 3 e ∆r = ∆h ≪ 1 o erro cometido nas aproximações do raio e da
altura. Logo, o erro estimado do volume é dado por
|∆V| = |V(2 + ∆r, 3 + ∆h) − V(2, 3)|
≈ |Vr (2, 3) · ∆r + Vh (2, 3) · ∆h|
≈ |(Vr (2, 3) + Vh (2, 3)) · ∆r|
≈ 16π|∆r|.
Então, para que |∆V| seja majorado por 0, 1 m3 , basta que 16π|∆r| o seja. Considere daı́
1
≈ 0, 001989.
160π
Assim, a precisão requerida é da ordem de 2 mm tanto no raio quanto na altura.
16π|∆r| ≤ 0, 1 ⇔ |∆r| ≤
6. O interior de um tanque cilı́ndrico metálico tem altura de 1, 2 m e raio de 80 cm. Se
a espessura das paredes é de 5 mm, calcule a quantidade aproximada de metal usada
na construção do tanque via aproximação linear e o erro relativo cometido em tal aproximação.
Resolução:
Como no exercı́cio anterior, V(r, h) = πr2 h é o volume do cilindro de raio r e altura
h, com derivadas parciais Vr = 2πrh e Vh = πr2 , e queremos usar a fórmula da aproximação linear lá apresentada. Sejam agora r0 = 80 cm, h0 = 120 cm, ∆r = 0, 5 cm e
∆h = 2 · 0, 5 = 1 cm. Assim, como ∆V = V(r0 + ∆r, h0 + ∆h) − V(r0 , h0 ), por um lado,
via aproximação linear,
∆V ≈ 2πr0 h0 ∆r + πr20 ∆h
≈ 30159, 29 + 20106, 19 = 50265, 48 cm3 .
Por outro lado, calculando diretamente pela fórmula do volume de um cilindro, temos
que
∆V = π (r0 + ∆r)2 (h0 + ∆h) − πr20 h0
≈ 2463355.00 − 2412743.16 = 50611, 84 cm3 .
Então, o erro absoluto é dado por 50611, 84 − 50265, 48 = 346, 36 cm3 , enquanto que
346,36
o erro relativo é dado por 50611,84
≈ 0.0068 < 7 · 10−3 . Note ainda que, embora o erro
relativo seja pequeno, o erro absoluto é grande pois ∆r e ∆h não são muito menores do
que 1, que é a condição para que a aproximação linear seja efetiva.
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
85
7. Um observador vê o topo de uma torre sob um ângulo de elevação de 30◦ com um possı́vel
erro de 1 ′ . Sua distância a torre é de 300 m com possı́vel erro de 10 cm. Via aproximação
linear, determine o possı́vel erro no cálculo da altura aproximada da torre.
Resolução:
Sendo x a distância do observador a torre, θ o ângulo de elevação e h = x tg θ a altura
da torre, temos hx = tg θ e hθ = x/ cos2 θ. Considere x0 = 300 m e θ0 = π6 rad com
∆x = 0, 1 m e ∆θ ≈ 0, 0003 rad.12 Daı́, como ∆h = h (x0 + ∆x, θ0 + ∆θ) − h (x0 , θ0 ), por
um lado, o erro aproximado da altura pela aproximação linear é dado por
∆h ≈ (tg θ0 ) ∆x +
x0
∆θ
cos2 θ0
≈ 0, 177735 m.
Por outro lado,
π
π
∆h = h 300, 1, + 0, 0003 − h 300,
6
6
≈ 173, 382877 − 173, 205081 = 0, 177796 m.
Note então que o erro relativo é dado por
0,177796−0,177735
0,177796
≈ 3.4 · 10−4 .
8. Se f é uma função diferenciável tal que fx (1, −1) = 2 e fy (1, −1) = 0, determine a inclinação da reta tangente ao gráfico da função Z(t) = f 2t2 − t, −t4 no ponto de abscissa
t0 = 1.
Resolução:
Sabemos do “Cálculo I” que a inclinação é dada por Z ′ (1). Assim, seja P0 = (t0 , Z (t0 ))
um ponto fixo do gráfico G (Z) de Z (como ilustra a figura seguinte).
(t, z(t))
G (Z)
(t, Z(t))
(t0 , Z (t0 ))
Para tal ponto, se z(t) = at + b é a reta tangente a G (Z) em P0 , tal reta tem inclinação
12
Via uma simples Regra de Três,
π
180
rad está para 1◦ que está para 60 ′ .
86
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
a = Z ′ (t0 ). Logo, se t0 = 1, x(t) = 2t2 − t e y(t) = −t4 , então
a = Z ′ (1)
d
= f(x(t), y(t))
dt
t=1
= ∇f(x(1), y(1)) · (x ′ (1), y ′ (1))
= (fx (1, −1), fy (1, −1)) · 4 · (1) − 1, −4 · (1)3
= 2 · 3 + 0 · (−4)
= 6,
onde usamos a Regra da Cadeia na terceira igualdade anterior, de cima para baixo.
~ perpendicular à curva de equação x ln y − y ln x = 0√no ponto
9. Determine o vetor n
P0 = (1, 1), considerando que a sua primeira componente é positiva e ||~n|| = 2 2.
Observação: Analogamente ao caso de funções reais de três variáveis reais, para uma
função f(x, y) adequada, ∇f (P0 ) é ortogonal a curva f(x, y) = constante = f (P0 ) no
ponto P0 desta curva.
Resolução:
~ = k∇f (P0 ) e ∇f = ln y − yx , yx − ln x , temos que ∇f(1, 1) = (−1, 1) e n
~ =
Como n
(−k, k), sendo que, para −k > 0, temos k < 0. Daı́
√
√
√
||~n|| = 2 2 ⇒ 2k2 = 2 2
√
√
⇒ |k| 2 = 2 2
⇒ k = −2
~ = (2, −2).
⇒n
10. Dê os versores normais a superfı́cie de equação eyz ln x + ln z = 1, no ponto P0 dessa superfı́cie de ordenada e cota iguais a 1.
Resolução:
Se P0 = (x0 , 1, 1) satisfaz a equação eyz ln x + ln z = 1, então eln x0 = 1, isto é, x0 = 1.
Por outro lado, a superfı́cie dada é representada por f(x, y, z) = eyz ln x + ln z = 1 =
f (P0 ) e tem vetor normal em P0 = (1, 1, 1) dado por múltiplos do vetor ∇f (P0 ) =
(fx (P0 ) , fy (P0 ) , fz (P0 )) com
fx =
yz yz ln x
e
,
x
fy = z ln xeyz ln x
e fz = y ln xeyz ln x + 1z .
Então ∇f (P0 ) = (1, 0, 1). Daı́ os versores normais a superfı́cie em P0 são dados por
~ = ± √12 (1, 0, 1).
n
11. Se u = f(x, y) está definida e tem derivadas parciais de primeira ordem contı́nuas num
domı́nio adequado, x = r cos θ e y = r sen θ, prove então que
∂u
∂x
2
+
∂u
∂y
2
=
∂u
∂r
2
1
+ 2
r
∂u
∂θ
2
.
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
87
Sugestão: Regra da Cadeia no segundo membro.
Resolução:
Calculando separadamente cada parcela do segundo membro e somando os resultados
temos que
∂u
∂r
2
2
∂u ∂x ∂u ∂y
=
+
∂x ∂r ∂y ∂r
= (ux cos θ + uy sen θ)2
= u2x cos2 θ + 2ux uy cos θ sen θ + u2y sen2 θ
+
1
r2
∂u
∂θ
2
2
1 ∂u ∂x ∂u ∂y
= 2
+
r
∂x ∂θ ∂y ∂θ
1
= 2 (ux r(−sen θ) + uy r cos θ)2
r
= u2x sen2 θ − 2ux uy sen θ cos θ + u2y cos2 θ
=
u2x + u2y .
88
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
3.5.4
Otimização
1. Em existindo, qual é a menor distância entre o ponto P0 = (2, 1, 4) e o plano Π dado pela
equação x + 2y + z = 5?
Resolução via Geometria Analı́tica:
Distância entre P0 = (x0 , y0 , z0 ) e Π : ax + by + cz + d = 0 é dada por
|ax0 + by0 + cz0 + d|
√
a2 + b2 + c2
|1 · 2 + 2 · 1 + 1 · 4 − 5|
√
=
12 + 22 + 12
3
=√
6
r
3
u.c..
=
2
d(P0 , Π) =
Resolução via Teste da Derivada Segunda:
Se P = (x, y, z) ∈ Π, então
pP = (x, y, 5 − x − 2y) e d(P0 , Π) é, em existindo, o menor valor
de d(x, y) = d(P0 , P) = (x − 2)2 + (y − 1)2 + (1 − x − 2y)2 . Note agora que, como d
é positiva, se f(x, y) = d(x, y)2 = (x − 2)2 + (y − 1)2 + (1 − x − 2y)2 , então temos que
fmı́nimo = (dmı́nimo )2 . (Note que isso nos livra de derivar raiz quadrada!)
Determinação do(s) Ponto(s) Crı́tico(s):
fx = 2(x − 2) − 2(1 − x − 2y) = 4x + 4y − 6 = 0
⇒ y = 0, x = 3/2.
fy = 2(y − 1) − 4(1 − x − 2y) = 4x + 10y − 6 = 0
Como cada ponto do domı́nio de f é interior ao mesmo, em particular (3/2, 0) é interior
a tal domı́nio. Assim, podemos aplicar o
Teste da Derivada II para (3/2, 0):
Como H(3/2, 0) = fxx fyy − f2xy |(3/2,0) = 4 · 10 − 42 > 0 e fxx (3/2, 0) = 4 > 0, P é ponto
de mı́nimo local (e global)
mais próximo de P0
p sendo P = (3/2, 0, 7/2) ∈ Π o p
√ para f e d,
com distância dmı́nimo = fmı́nimo = (−1/2)2 + (−1)2 + (−1/2)2 = 3/2 u.c..
2. Em existindo, qual a menor distância da origem a superfı́cie xyz = 8?
(Aqui, note que x, y e z são diferentes de 0.)
Resolução via Teste da Derivada Segunda:
Como na resolução da questão anterior, seja f(x, y) = d(x, y)2 = x2 + y2 + (8/xy)2 .
Determinação do(s) Ponto(s) Crı́tico(s):
= 0 ⇒ x4 y2 = 64
fx = 2x − x128
3 y2
⇒ x = ±y = ±2.
fy = 2y − x128
= 0 ⇒ x2 y4 = 64
2 y3
Como pontos que não estão nos eixos cartesianos são interiores ao domı́nio de f, podemos
aplicar o
Teste da Derivada II para (2, 2), (2, −2), (−2, 2) e (−2, −2):
Como H = fxx fyy − f2xy = [2 + (3 · 128/x4 y2 )][2 + (3 · 128/x2 y4 )] − (2 · 128/x3 y3 )2 > 0 e
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
89
fxx > 0, (±2, ±2) são pontos de mı́nimo locais para f e d com distância
p
dmı́nimo = fmı́nimo
p
= (±2)2 + (±2)2 + (±2)2
√
= 12
√
= 2 3 u.c..
Note ainda que, como xyz = 8 > 0, temos que (2, 2, 2), (2, −2, −2), (−2, 2, −2) e
(−2, −2, 2) são os pontos da superfı́cie mais próximos da origem.
Resolução via Multiplicadores de Lagrange:
fx
p
fy
Sejam d(x, y, z) = x2 + y2 + z2 , f = d2 , g(x, y, z) = xyz e
fz
g(x, y, z)
2x = λyz,
2y = λxz,
∴
2z = λxy,
xyz = 8.
=
=
=
=
λgx ,
λgy ,
λgz ,
8.
Multiplicando agora a primeira equação do sistema anterior por x, a segunda por y e a
terceira por z, obtemos 2x2 = 2y2 = 2z2 , isto é, y = ±x e z = ±x. Assim, da última
equação do sistema, temos que ±x3 = 8, isto é, x = ±2, y = ±2 e z = ±2. Por outro
lado, como xyz = 8 > 0, resulta que (2, 2, 2), (2, −2, −2), (−2, 2, −2) e (−2, −2, 2) são
os pontos da superfı́cie mais próximos da origem. Note ainda que, se P é qualquer um
destes quatro pontos,
√
√
dmı́m = d(P) = 12 = 2 3 u.c..
(Para ter certeza que os quatro pontos obtidos são pontos de mı́nimo (e não de máximo)
para d, considere outro ponto P ′ 6= P cujas coordenadas
a condição xyz = 8.
√satisfazem
√ √
√
′
′
Daı́, verifique que d (P ) > d(P). Por exemplo, se P = 2 2, 2, 2 , então 2 2·2· 2 = 8
√
√
e d (P ′ ) = 14 > 12 = d(P).)
3. Obter, via multiplicadores de Lagrange, as dimensões da caixa de maior volume cuja área
total da superfı́cie seja igual a 64 cm2 .
Resolução:
Sejam f(x, y, z) = xyz e g(x, y, z) = 2(xy + yz + xz) o volume e a área, respectivamente.
Daı́
⇒
yz = 2λ(y + z),
fx = λgx
fy = λgy
⇒
xz = 2λ(x + z),
fz = λgz
⇒
xy = 2λ(x + y),
g(x, y, z) = 64 ⇒ xy + yz + xz = 32.
Multiplicando a primeira equação do sistema anterior por x, a segunda por y, a terceira
por z, igualando-as e notando-se que λ 6= 0,13 temos que xy + xz = xy + yz = xz + yz.
13
Se λ = 0, então, por exemplo, yz = 0 acarreta volume nulo!
90
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
2
Daı́ x =
py = z. Assim, Da última equação do sistema anterior temos que 3x = 32, isto
é, x = 32/3 cm, onde desconsideramos
a raiz negativa.
p
p
p
32/3, 32/3, 32/3 é ponto de máximo (e não de mı́nimo)
(Para ter certeza que P =
para f, considere outro ponto P ′ 6= P cujas coordenadas satisfazem a condição xy + yz +
xz = 32. Daı́, verifique que f (P ′ ) < f(P). Por exemplo, para x = y = 1, a condição
anterior fica 1 · 1 + 1 · z + 1 · z = 32, isto é, z = 31/2. Considere daı́ P ′ = 1, 1, 312 . Logo
r
31
32 32
′
f (P ) =
<
= f(P)
2
3
3
pois, caso contrário, temos
31
32
≥
2
3
r
2 2
32
32
31
≥
·
2
3
3
3
2
32
31
≥
⇒
4
27
⇒ 27 · 31 · 31 ≥ 4 · 32 · 32 · 32,
32
⇒
3
que é uma desigualdade inválida.)
4. Em existindo, determine o elipsóide
região de volume mı́nimo.14
x2
a2
+
y2
b2
+
z2
c2
= 1 que passa por (1, 1, 2) e limita a
Resolução via Multiplicadores de Lagrange:
e, como (1, 1, 2) satisfaz a equação
f(a, b, c) = 4πabc
3
1
1
4
+ b2 + c2 = 1.
a2
∴
fa = λga
fb = λgb
f = λgc
c
g(x, y, z) = 1
⇒
⇒
⇒
⇒
1
a2
+
x2
a2
+
4πbc
=
3
4πac
=
3
4πab
=
3
1
+ c42
b2
y2
b2
+
z2
c2
= 1, g(a, b, c) =
− a2λ3 ,
− b2λ3 ,
− 8λ
,
c3
= 1.
Multiplicando a primeira equação do sistema anterior por a, a segunda por b e a terceira
por c, igualando-as e notando que λ 6= 0,15 segue que a2 = b2 e c2 = 4b2 . Substituindo
tais quadrados na última equação do sistema anterior resulta em b2 = 3. Daı́ a2 = 3 e
2
2
2
c2 = 12. Assim, em existindo, x3 + y3 + z12 = 1 é o elipsóide de menor volume que passa
por (1, 1, 2).
√ √ √ 3, 3, 2 3 é ponto de mı́nimo (e não de máximo) para f,
(Para ter certeza que P =
considere outro ponto P ′ 6= P cujas coordenadas satisfazem a condição a12 + b12 + c42 = 1.
Daı́, verifique que f (P ′ ) > f(P). Por exemplo, para a = b = 2,
a condição anterior fica
√ √
1
1
4
′
+ 4 + c2 = 1, isto é, c = 2 2. Considere daı́ P = 2, 2, 2 2 . Então
4
√ 3
√
3
4π2
4π23 2
>
= f(P)
f (P ′ ) =
3
3
14
Em integrais triplas, mostraremos que o volume da região limitada pelo elipsóide
u.v..
por 4πabc
3
15
Se λ = 0, então, por exemplo, bc = 0 acarreta volume nulo!
x2
a2
+
y2
b2
+
z2
c2
= 1 é dado
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
91
pois, caso contrário, temos
3
2
√
√ 3
√
√
2≤2
3 ⇒4 2≤3 3
que é uma desigualdade inválida.)
⇒ 16 · 2 ≤ 9 · 3
⇒ 32 ≤ 27,
5. Em sendo possı́vel, obter a caixa retangular de maior volume que pode ser inscrita no
2
2
2
elipsóide ax2 + yb2 + cz2 = 1.
Resolução via Multiplicadores de Lagrange:
Sendo (x, y, z) o vértice da caixa no primeiro octante, f(x, y, z) = 8xyz é o volume da
2
2
2
caixa para (x, y, z) satisfazendo a equação g(x, y, z) = ax2 + yb2 + cz2 = 1.
∴
fx = λgx
f = λg
y
y
f
=
λg
z
z
g(x, y, z) = 1
⇒
⇒
⇒
⇒
x2
a2
4yz = aλx2 ,
4xz = λy
,
b2
λz
4xy = c2 ,
2
y2
+ b2 + cz2 = 1.
Multiplicando a primeira equação do sistema anterior por x, a segunda por y, a terceira
2
2
2
por z, igualando-as e notando que λ 6= 0,16 temos que ax2 = yb2 = cz2 e, da última equação
2
2
2
= 3y
= 3zc2 = 1. Daı́ x = √a3 , y = √b3 e z = √c3 u.c..
do sistema anterior, 3x
a2
b2
(Podemos proceder como nos exercı́cios anteriores para verificar que tais x, y e z são as
coordenadas do ponto P de máximo (e não de mı́nimo) da função f restrita a condição
g = 1. Contudo, daremos agora uma explicação mais simples para tal fato. De fato,
desconsidere a aplicação do problema. Daı́ Dom(f) = R3 e
a
b
c
±√ , ±√ , ±√
3
3
3
são as soluções do sistema anterior - onde P é a solução com as três coordenadas positivas
√ .17 )
- com imagens por f dadas por ± 8abc
3 3
6. Seja f(x, y) = x2 + y2 definida em D = (x, y) ∈ R2 | x2 + 2y2 ≤ 1 . Obter os pontos de
máximo e mı́nimo globais de f sobre D.
Resolução:
Como f é contı́nua e D é compacto, f tem máximo e mı́nimo globais em D por (O2 ).
Daremos agora duas resoluções distintas para esta questão.
Resolução sem Cálculo de Várias Variáveis:
Como f(0, 0) = 0 ≤ x2 + y2 = f(x, y) para todo (x, y) ∈ R2 , (0, 0) é o ponto de mı́nimo
global. Por outro lado, de y2 ≤ 2y2 temos f(x, y) = x2 + y2 ≤ x2 + 2y2 ≤ 1 para pontos
(x, y) ∈ D. Logo o valor máximo de f em D é 1 pois, devido a f(x, y) ser o quadrado da
16
17
Se λ = 0, então, por exemplo, yz = 0. Daı́ o volume seria nulo!
O valor positivo é o máximo e o valor negativo é o mı́nimo.
92
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
distância de (x, y) a (0, 0), o ponto de máximo ocorre nos vértices (±1, 0) da elipse que
representa a fronteira de D.
Resolução com Cálculo de Várias Variáveis:
Devemos assim analisar
de D.
tanto o interior quanto a fronteira
2
2
Interior de D =
(x, y) ∈ R2 x2 + √y
<1 :
1
1/2)2
(
Análise do(s) Ponto(s) Crı́tico(s):
Se ∇f = (0, 0), então (x, y) = (0, 0), que é mı́nimo local via (O3.2 ). De fato, a origem é mı́nimo global de f(x, y) = x2 + y2 pois não existe ponto (x, y) ∈ R2 tal que
f(x, y) < f(0, 0)!
2
y
2 x2
Fronteira de D =
(x, y) ∈ R 12 + √ 2 = 1 :
(
1/2)
Da análise no interior de D, resta obter apenas o(s) ponto(s) de máximo global(globais)
na fronteira de D. Obteremos tais pontos via duas resoluções distintas.
Resolução via Multiplicadores de Lagrange:
= λgx
= 2λx,
fx
2x
2
2
2
2
fy
= λgy ⇒
2y
= 4λy,
f(x, y) = x + y , g(x, y) = x + 2y ⇒
2
2
g(x, y) =
1
x + 2y =
1.
Multiplicando a primeira equação do sistema anterior por 2y, a segunda por x, e igualando os primeiros membros das duas, temos que xy = 0. Daı́, usando a terceira equação
do sistema anterior, temos:
√
(a) x = 0 ⇒ y = ± 2/2;
(b) y = 0 ⇒ x = ±1.
√
√
Como f(0, ± 2/2) = 02 +(± 2/2)2 = 1/2 e f(±1, 0) = 12 +02 = 1, (±1, 0) são os pontos
de máximo globais de f em D.
Resolução em que Escrevemos f como Função Apenas de x ou Apenas de y na Fronteira
de D:
2
(a) Substituindo x2 = 1 − 2y2 em f(x, y) = xp
+ y2 ,pf passa a ser uma função apenas
2
de y, digamos, g(y) = 1 − y com y ∈ [− 1/2, 1/2]. Como g ′ (y) = −2y, y = 0
′′
é o único ponto crı́tico
p de g.pComo g (y) = −2 < 0, y = 0 é o ponto de máximo
local no intervalo (− 1/2,
p 1/2) com valor máximo local g(0) = 1. Por fim, na
fronteira, temos que g(± 1/2) = 1/2 < 1.
∴
x2 = 1 − y2
{z
}
|
=⇒
x = ±1 ⇒ (±1, 0) são pontos de máximo locais para a f
y=0
com valor máximo local f(±1, 0) = (±1)2 + 02 = 1.
(b) Substituindo y2 = (1 − x2 )/2 em f(x, y) = x2 + y2 , f passa a ser uma função apenas
de x, digamos, h(x) = (1 + x2 )/2 com x ∈ [−1, 1]. Como h ′ (x) = x, x = 0 é o
único ponto crı́tico de h. Como h ′′ (x) = 1 > 0, x = 0 é o ponto de mı́nimo local no
intervalo (−1, 1), que não nos interessa pois, da análise no interior de D, já obtemos
o ponto de mı́nimo global para f. Por fim, na fronteira, h(±1) = 1. Daı́ (±1, 0) são
pontos de máximo locais para f em D.
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
93
Então (±1, 0) são os pontos de máximo globais para f em D.
7. Sendo f(x, y) = x2 − xy, ache os valores máximo e mı́nimo globais de f na bola fechada
x2 + y2 ≤ 1.
Resolução:
f é contı́nua no compacto D = (x, y) ∈ R2 | x2 + y2 ≤ 1 . Então f admite máximo e
mı́nimo globais em D por (O2 ). Vamos assim realizar uma busca por tais pontos no
interior e na fronteira de D.
2
Interior de D = (x, y) ∈ R2 | x
+ y2 < 1 :
fx = 0
2x − y = 0
Cálculo do(s) Ponto(s) Crı́tico(s):
⇒
⇒ x = y = 0.
fy = 0
−x
= 0
Teste da Derivada Segunda: H(0, 0) = fxx fyy − f2xy |(0,0) = −1 < 0 ⇒ (0, 0) é ponto de sela.
Daı́ o máximo e o mı́nimo de f não ocorrem no interior de D. Devemos buscá-los então na
Fronteira de D = (x, y) ∈ R2 | x2 + y2 = 1 :
1a. Resolução: Multiplicadores de Lagrange:
= λgx
fx
2x − y = 2λx;
2
2
2
f
=
λg
−x
= 2λy;
f(x, y) = x − xy, g(x, y) = x + y ⇒
y
y ⇒
2
2
x +y =
1.
g(x, y) =
1
Multiplicando a primeira equação do sistema por y, a segunda por x, igualando os primeiros membros das duas, e usando a terceira equação, temos:
2xy − y2 = −x2 = y2 − 1 ⇒ 2y2 − 1 = 2xy e x2 = 1 − y2
⇒ (2y2 − 1)2 = (2xy)2 = 4(1 − y2 )y2
⇒ 4y4 − 4y2 + 1 = 4y2 − 4y4
⇒ 8y4 − 8y2 + 1 = 0
t=y2
Daı́:
(a) y2 =
√
2+ 2
4
(b) y2 =
√
2− 2
4
Daı́,
√
1− 2
2
√
2− 2
4
=⇒ 8t2 − 8t + 1 = 0
√
2± 2
2
.
⇒y =t=
4
√
⇒ 2xy = y2 − x2 = 22 ⇒
√
√
√
2
2− 2
1− 2
2
f(x, y) = x − xy =
−
=
;
4
4
2
⇒ x2 = 1 − y2 =
√
2+ 2
4
√
⇒ 2xy = y2 − x2 = − 22 ⇒
√
√
√
1+ 2
2
2+ 2
2
+
=
.
f(x, y) = x − xy =
4
4
2
⇒ x2 = 1 − y2 =
é o valor mı́nimo e
√
1+ 2
2
é o máximo.
2a. Resolução: Composição de f com Curva Parametrizada:
94
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
Sendo x(t) = cos t e y(t) = sen t, t ∈ [0, 2π], uma parametrização de x2 + y2 = 1, note
que obter o valor máximo/mı́nimo de
z(t) = f(x(t), y(t)) = cos2 t − cos t sen t =
1 + cos(2t) − sen(2t)
, t ∈ [0, 2π],
2
significa obter o valor máximo/mı́nimo de f ao longo de x2 + y2 = 1. Daı́:
(a) z(t) é contı́nua no compacto [0, 2π]. Assim, por (O2 ), z(t) tem máximo e mı́nimo
globais em [0, 2π];
(b) Valores de z(t) na Fronteira de [0, 2π], isto é, {0, 2π}: z(0) = z(2π) = 1;
(c) Valores Máximo/Mı́nimo no Interior de [0, 2π], isto é, (0, 2π):
Ponto(s) Crı́tico(s) de z:
z ′ (t) = −sen(2t) − cos(2t) = 0 para 0 < t < 2π, isto é, cos(2t)
= −sen(2t) para
√
3π
7π
11π
15π
1± 2
0 < 2t < 4π. Daı́ 2t = 4 = 4 = 4 = 4 , sendo z(t) = 2 para tais valores.
Como f não tem valor máximo nem mı́nimo no
interior do compacto D,
tais valores devem
√
√
1+ 2
1− 2
ocorrer na fronteira de D. Segue daı́ que 2 é o valor mı́nimo e 2 é o valor máximo
de f em D.
8. Determinar o máximo e o mı́nimo globais de z = Ax2 + 2Bxy + Cy2 , para B 6= 0, na
circunferência x2 + y2 = 1.
Resolução via Multiplicadores de Lagrange:
Se z = f(x, y) e g(x, y) = x2 + y2 , então
= λgx
By = 0;
fx
2Ax + 2By = 2λx ⇒ (λ − A)x −
fy
= λgy ⇒
2Bx + 2Cy = 2λy ⇒
−Bx + (λ − C)y = 0;
2
g(x, y) = 1
x + y2
= 1.
Note que λ 6= A. (De fato, λ = A na primeira equação do sistema anterior implica em
y = 0. Tal valor na segunda equação acarreta x = 0. Mas (x, y) = (0, 0) não é ponto da
circunferência x2 + y2 = 1, isto é, x = y = 0 não satisfaz a terceira equação do sistema
B
anterior!) Da primeira equação temos x = λ−A
y e, multiplicando a primeira equação por
(λ−C), a segunda por B, e somando as duas resultantes temos ((λ−A)(λ−C)−B2 )x = 0.
Daı́ x = 0 (o que acarretaria y = 0!) ou B2 = (λ − A)(λ − C) . Ainda, da condição
h 2
i
2
B
2
2
x + y = 1 temos (λ−A)2 + 1 y2 = 1, isto é, y2 = B2(λ−A)
. Dessas obtemos
+(λ−A)2
AB2
2B2
z=
+
+ C y2
(λ − A)2 λ − A
A(λ − C)
(λ − A)2
=
+ 2(λ − C) + C
λ−A
(λ − A)(2λ − (A + C))
A(λ − C) + 2(λ − A)(λ − C) + C(λ − A)
=
2λ − (A + C)
2
2λ − (A + C)λ
=
2λ − (A + C)
= λ,
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
2
95
A+C±
2
√
(A+C)2 −4(AC−B2 )
que é obtido via λ − (A + C)λ + AC − B = 0, isto é, λ± =
. Daı́,
2
z = λ+ é o valor máximo global e z = λ− é o mı́nimo global.
Observação: Para a parte da
fronteira do√ exercı́cio anterior observe que A = 1, B =
√
1+ 2
−1/2 e C = 0. Daı́ zmáx = 2 e zmı́n = 1−2 2 !
9. Uma fábrica produz dois tipos de lâmpadas. Sendo feitas x lâmpadas do tipo 1 e y do
tipo 2, cada uma delas poderá ser vendida por 100 − 2x e 125 − 3y u.m., respectivamente.
O custo de fabricação de x lâmpadas do tipo 1 e y do tipo 2 é de 12x + 11y + 4xy u.m..
Quantas lâmpadas de cada tipo devem ser produzidas para que a fábrica obtenha o lucro
máximo e de quanto é tal lucro?
Resolução:
f(x, y) = x(100 − 2x) + y(125 − 3y) − (12x + 11y + 4xy) = 88x + 114y − 2x2 − 3y2 − 4xy
é a função lucro e, sendo
x ≥ 0, y ≥ 0, 100 − 2x ≥ 0 e 125
− 3y ≥ 0, temos que f é
125
2
contı́nua no domı́nio (x, y) ∈ R | 0 ≤ x ≤ 50 e 0 ≤ y ≤ 3 fechado e limitado. Daı́ f
tem máximo e mı́nimo globais em tal domı́nio.
:
Interior do Domı́nio: (x, y) ∈ R2 : 0 < x < 50 e 0 < y < 125
3
Cálculo
do(s)
Ponto(s)
Crı́tico(s):
fx = 88 − 4x − 4y = 0
x + y = 22 ×(−2)
⇒
⇒ x = 9, y = 13.
fy = 114 − 6y − 4x = 0
2x + 3y = 57 ←֓ +
Teste da Derivada Segunda:
(9, 13) é ponto de máximo local com valor máximo local f(9, 13) = 1137. (Verifique!)
Fronteira do Domı́nio:
Vamos verificar que (9, 13) é, de fato, o ponto de máximo global. Para iniciar, vamos dividir a fronteira em quatro partes que representam os lados de tal fronteira. Para concluir,
vamos observar que em nenhuma delas f assume um valor maior que 1137.
Y
III
125/3
II
IV
(9, 13)
0
I : segmento de reta y = 0, x ∈ [0, 50]:
I
50
X
• Interior, isto é, (0, 50):
f1 (x) = f(x, 0) = 88x − 2x2 ⇒ f1′ (x) = 88 − 4x ⇒ f1′′ (x) = −4.
∴ f1 tem máximo local de 968 em x = 22.
• Fronteira, isto é, {0, 50}:
f1 (0) = 0 e f1 (50) < 0.
96
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
∴ f(9, 13) > f(22, 0) = 968 ⇒ máximo global de f não ocorre em I.
II : segmento de reta x = 0, y ∈ [0, 125/3]:
• Interior, isto é, (0, 125/3):
f2 (x) = f(0, y) = 114y − 3y2 ⇒ f2′ (y) = 114 − 6y ⇒ f2′′ (x) = −6.
∴ f2 tem máximo local de 1083 em y = 19.
• Fronteira, isto é, {0, 125/3}: f2 (0) = 0 e f2 (125/3) < 0.
∴ f(9, 13) > f(0, 125/3) = 1083 ⇒ máximo global de f não ocorre em II.
, x ∈ [0, 50]:
III : segmento de reta y = 125
3
f3 (x) = f(x, 125/3) = f1 (x) − 1375
− 500
x < f1 (x) ⇒ máximo global de f não ocorre
3
3
em III.
IV : segmento de reta x = 50, y ∈ [0, 125/3]:
f4 (y) = f(50, y) = f2 (y) − 600 − 200y < f2 (y) ⇒ máximo global de f não ocorre em
IV.
Conclusão: Para 9 lâmpadas do tipo 1 e 13 do tipo 2, temos lucro máximo de 1137
u.m..
10. Em existindo, qual a menor distância da origem a curva y = x3 + 1?
Resolução via Multiplicadores de Lagrange:
Objetivo: Minimizar f(x, y) = d(x, y)2 = x2 + y2 restrita a g(x, y) = y − x3 − 1 = 0.
Para uma representação de parte do gráfico de y = x3 + 1, ver gráfico com concavidade
para baixo na ilustração que segue.
Y
1
x1
−1
x2
0
h(x) = 3x4 + 3x + 1
y = x3 + 1
X
(Nesta ilustração, o gráfico com concavidade para cima representa parte do gráfico da
função h(x) = 3x4 + 3x + 1, que iremos precisar a seguir. Ainda, são ilustradas as raı́zes
x1 e x2 com h (x1 ) = h (x2 ) = 0.)
(0, 0) não pode então ser o ponto de mı́nimo global de f pois o gráfico de y = x3 + 1 não
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
passa pela origem. De fato, 0 6= 03 + 1. Considere agora
= λgx
fx
2x
fy
= λgy ⇒
2y
g(x, y) = 0
y − x3 − 1
97
o sistema
= −3λx2 ,
= λ,
= 0,
com λ 6= 0 (caso contrário, x = y = 0!). Daı́:
(1) y 6= 0 (pela segunda equação);18
y − 03 − 1 = 0
|
{z
}
(2) x = 0
=⇒
y = 1;19
y = x3 + 1
| {z }
=⇒
h(x) = 3x4 + 3x + 1 = 0.
(3) x 6= 0, x(3λx + 2) = 0 e λ = 2y ⇒ 6xy + 2 = 0
Assim, tudo se resume a busca pelas raı́zes da equação h(x) = 0. Vamos aqui estabelecer
a existência de raı́zes vizualizando o gráfico de h. Depois, o cálculo destas raı́zes pode ser
feito via algum método numérico.
Gráfico de y = h(x) (Confira ilustração anterior):
(3.1) h(−1) = h(0) = 1 ⇒ gráfico passa por (−1, 1) e (0, 1), sendo que este último satisfaz
g(x, y) = 0;
√
3
< 0 para x < −1/ 4 √ ∴ h decrescente;
(3.2) h ′ (x) = 12x3 + 3
= 0 para x = x0 =√−1/ 3 4 pto. de mı́n. loc. (h ′′ (x0 ) = 36x20 > 0);
> 0 para x > −1/ 3 4
∴ h crescente;
(3.3) h(x0 ) < 0 e lim h(x) = ∞.
x→±∞
Daı́ o gráfico é esboçado como na figura anterior e existem x1 e x2 em [−1, 0] tais que
h(x1 ) = 0 e h(x2 ) = 0. Utilizando agora o Método de Newton, como descrito a seguir,
obtemos x1 p
≈ −0, 846 e x2 ≈ −0, 348.
p Daı́ a distância mı́nima é o menor valor entre
d(x1 , y1 ) = f(x1 , y1 ) e d(x2 , y2 ) = f(x2 , y2 ) com y1,2 − x31,2 − 1 = 0, isto é, y1 ≈ 0, 395
e y2 ≈ 0, 958. Por fim, f(x
√1 , y1 ) ≈ 0, 716 + 0, 156 = 0, 872 e f(x2 , y2 ) ≈ 0, 121 + 0, 918 =
1, 039, e então dmı́nima ≈ 0, 872 ≈ 0, 934.
Método de Newton: Sendo h(x) uma função adequada,
h(r) = 0, r0 um ponto inicial próximo da raiz r e rn =
n−1 )
bem definido (isto é, h ′ 6= 0 nos rn ’s) para
rn−1 − hh(r
′ (r
n−1 )
n = 0, 1, 2, 3, . . ., temos rn → r se n → ∞.
√
√
Por exemplo, para h(x) = x2 − 2, já sabemos que h(± 2) = 0, onde 2 é aproximadamente igual a 1, 414213562. Seja então r0 = 1. Daı́:
−1
h(r0 )
=1−
= 1, 5;
′
h (r0 )
2
h(r1 )
1/4
r2 = r1 − ′
= 1, 5 −
= 1, 416666667;
h (r1 )
3
h(r2 )
≈ 1, 414215686;
r3 = r2 − ′
h (r2 )
r1 = r0 −
..
.
18
19
Daı́ (−1, 0) não é ponto de mı́nimo e a distância mı́nima é menor do que 1.
Mas (0, 1) não pode ser ponto de mı́nimo pois a distância mı́nima é menor do que 1.
98
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
No nosso exercı́cio, h(x) = 3x4 + 3x + 1, h ′ (x) = 12x3 + 3 e r0 = 0, 9 acarretam:
3 · (0, 9)4 + 3 · (0, 9) + 1
h(r0 )
=
0,
9
−
≈ 0, 418
h ′ (r0 )
12 · (0, 9)3 + 3
h(r1 )
r2 = r1 − ′
≈ −0, 187;
h (r1 )
h(r2 )
≈ −0, 348;
r3 = r2 − ′
h (r2 )
r1 = r0 −
..
.
(As reticências verticais anteriores significam que aproximações mais precisas de rn ocorrem para n “suficientemente grande”.)
11. Em existindo o triângulo cujo produto dos senos dos seus ângulos internos é o maior
possı́vel, verifique que tal triângulo é equilátero.
Resolução:
Sejam x, y e z os ângulos de tal triângulo (veja figura 3.6). Daı́, como x + y + z = π,
Figura 3.6: Apenas o primeiro triângulo, da esquerda para a direita, tem sen x · sen y · sen z
máximo.
temos que
sen x sen y sen z = sen x sen y sen(π − (x + y))
= sen x sen y sen(x + y)
= f(x, y),
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
99
onde usamos sen(π − (x + y)) = sen(x + y) na segunda igualdade. Por um lado, como x
e y devem ser positivos e x + y deve ser menor que π, todos os pontos de
Dom(f) = {(x, y) ∈ R | x > 0, y > 0, x + y < π}
são interiores. Por outro lado, entre tais pontos, o(s) candidato(s) a ponto(s) de máximo/mı́nimo
de f devem satisfazer, por (O1 ), o sistema
(a) fx = cos x sen y sen(x + y) + sen x sen y cos(x + y) = 0;
(b) fy = cos y sen x sen(x + y) + sen x sen y cos(x + y) = 0.
De (a)-(b) temos
(cos x sen y − cos y sen x) sen(x + y) = sen(y − x) sen(x + y) = 0.
Como 0 < x + y < π, sen(x + y) 6= 0 e então sen(y − x) = 0. Assim, como y − x = 0,
segue de (a) ou (b) que
cos x sen x sen 2x + sen x sen x cos 2x = sen x(cos x sen 2x + sen x cos 2x)
= sen x sen 3x
= 0.
Como sen x 6= 0, 3x é igual a 0 ou π. (Temos apenas 3x = π pois x não pode ser nulo.)
Conclusão: x = y = z = π3 .
Aplicando agora (O3.2 ), temos que o único ponto crı́tico (π/3, π/3, π/3) é ponto de
máximo local para f,20 daı́ global.
12. Dado um triângulo acutângulo ABC, verifique que o ponto P cuja soma das distâncias
aos vértices é mı́nima, supondo-se a existência de tal ponto, é tal que as semi-retas PA,
PB e PC formam entre si um ângulo de 120 graus (veja figura 3.7).
B
~v
β
α
P
γ
~
u
~
w
C
A
Figura 3.7: Triângulo Acutângulo.
20
Verifique!
100
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
Resolução:
Sendo P = (x, y), A = (xA , yA ), B = (xB , yB ) e C = (xC , yC ), temos que
−→
−
→
−→
f(x, y) = ||AP|| + ||BP|| + ||CP||
p
= (x − xA )2 + (y − yA )2
p
+ (x − xB )2 + (y − yB )2
p
+ (x − xC )2 + (y − yC )2
é a soma das distâncias de P aos vértices. Por um lado, note agora que não pedimos a
apresentação do mı́nimo global para tal f. Por outro lado, estamos supondo a existência
de tal valor mı́nimo global, isto é, é para resolver a questão a partir de tal
suposição. Assim, tal valor mı́nimo, se ocorrer em algum ponto interior ao domı́nio de
f para o qual exista o gradiente desta função, deverá anular tal gradiente por (O1 ). Logo,
como todos os pontos do R2 são interiores ao Dom(f), temos que considerar o sistema
!
x − xA x − xB x − xC y − yA y − yB y − yC
(fx , fy ) =
−→ + −
→ + −→ , −→ + −
→ + −→
||AP||
||BP||
||CP|| ||AP||
||BP||
||CP||
−→
−
→
−→
AP
BP
CP
= −→ + −
→ + −→
||AP|| ||BP|| ||CP||
= (0, 0).
−→ −
→ −→
~ os versores de AP, BP e CP, respectivamente, temos que
Então, sendo ~u, ~v e w
~u + ~v + w
~ = ~0.
~ , respectivamente, isto é,
Calculando-se o produto interno de tal equação por ~u, ~v e w
calculando-se
~u · (~u + ~v + w
~ ) = ~u · ~0, ~v · (~u + ~v + w
~ ) = ~v · ~0 e w
~ · (~u + ~v + w
~)=w
~ · ~0,
temos que
1 + cos α + cos γ = 0, cos α + 1 + cos β = 0 e cos γ + cos β + 1 = 0,
~ e γ é o ângulo que
onde α é o ângulo que ~u forma com ~v, β é o ângulo que ~v forma com w
~ forma com ~u. Subtraindo-se cada uma dessas equações por uma das outras, obtemos
w
cos α = cos β = cos γ. Estas, substituı́das nas três equações anteriores, igualam a − 21 .
Daı́, devido a α + β + γ = 360 ◦ , segue que α = β = γ = 120 ◦ .
13. Em existindo, calcule a menor distância da parábola y = x2 + 1 a reta y = x − 2.
Resolução:
Note primeiramente que os gráficos não se interceptam. (Para uma representação geométrica,
veja a ilustração que segue.)
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
101
4
2
0
−2
−4
−4
−2
0
2
4
De fato, tal interseção implicaria em x2 + 1 = x − 2, isto é, x2 − x + 3 = 0, que não tem
solução real.
Vamos agora resolver a questão via “Cálculo II”. Daremos depois outra resolução (mais
simples) via “Cálculo I”.
Resolução via Teste da Derivada Segunda:
Seja f(x, y) o quadrado da distância d(x, y) entre o ponto x, x2 + 1 da parábola e o
2
ponto (y, y − 2) da reta. Daı́ f(x, y) = (x − y)2 + x2 − y + 3 e todos os pontos de
Dom(f) = R2 são interiores.
Agora, como d e f são positivas (pois os gráficos não se
√
interceptam), dmı́n = fmı́n . Ainda, note que não existe dmáx .
Cálculo do(s) Ponto(s) Crı́tico(s):
(a) fx = 2(x − y) + 4x(x2 − y + 3) = 0,
(b) fy = −2(x − y) − 2(x2 − y + 3) = 0.
De (a)+(b) temos 2(2x − 1)(x2 − y + 3) = 0. Daı́ x = 21 ou x2 − y + 3 = 0. Assim, por um lado, substituindo x = 12 em (a) ou (b) temos 2 12 − y + 2 14 − y + 3 =
1 − 2y + 21 − 2y + 6 = 0. Daı́ y = 158 . Por outro lado, substituindo x2 − y + 3 = 0 em (a)
ou (b) resulta em x = y. Daı́ x2 − x + 3 = 0. Como esta não tem solução real, o único
ponto crı́tico (candidato a ponto de mı́nimo) de f é (1/2, 15/8).21
Teste da Derivada II:
De fxx = 14 + 12x2 − 4y, fyy = 4 e fxy = −2 − 4x, temos que fxx (1/2, 15/8) > 0 e
H(1/2, 15/8) > 0. Daı́ (1/2, 15/8) é ponto de mı́nimo local para f. Como não existe
outro ponto de mı́nimo local interior ao Dom(f),22 este é global. Daı́, a distância √
mı́nima
√
11 2
ocorre entre os pontos (1/2, 5/4) e (15/8, −1/8) e é dada por dmı́n = fmı́n = 8 .
Resolução via Cálculo I:
Vamos obter o ponto da parábola f(x) = x2 + 1 cuja inclinação da reta tangente a tal
parábola em tal ponto
é a mesma da reta y = x − 2.23 Neste caso, 2x = f ′ (x) = 1, isto
é, x = 12 . Então f 12 = 45 . Para concluir, basta calcular a distância d do ponto 12 , 45 a
21
Confira (O1 ′ ).
Pois este teria de anular ∇f por (O1 ).
23
Tais retas são paralelas!
22
102
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
reta y = x − 2.24 Assim
1 5
− − 2
d = 2√ 4
1+1
11
= √4
2
√
11 2
=
u.c..
8
14. Sendo f(x, y, z) = 2x − y + 4z, ache o máximo e o mı́nimo de f restrita à interseção do
plano z = x com o cilindro x2 + 3y2 = 84.
Resolução via Multiplicadores de Lagrange:
Tal interseção é uma elipse, que é um conjunto compacto em R3 . Logo a função contı́nua
f admite máximo e mı́nimo em tal interseção por (O2 ). Assim, se g(x, y, z) = x − z e
h(x, y, z) = x2 + 3y2 , considere ∇f(x, y, z) = λ∇g(x, y, z) + µ∇h(x, y, z), g(x, y, z) = 0 e
h(x, y, z) = 84. Explicitamente, considere o sistema
(2, −1, 4) = λ(1, 0, −1) + µ(2x, 6y, 0), x − z = 0 e x2 + 3y2 = 84.
Da primeira equação de tal sistema, segue que λ + 2µx = 2, 6µy = −1 e λ = −4. Destas,
temos µx = 3 e µy = − 16 . Agora, muliplicando a primeira destas duas equações por y e
a segunda por x, temos x = −18y. Daı́, de x2 + 3y2 = 84, temos 18 · 18y2 + 3y2 = 3 · 28.
Logo, de 109y2 = 28, temos que
√
√
2 7
36 7
y = ±√
e z = x = ∓√
.
109
109
√
√
√ √
√ √ √
√
7
2 7
36 7
2 7 36
36
2 7
36 7
36 7 √
√
√
√
√
√
√
√
Então f − 109 , 109 , − 109 = 6 · − 109 − 109 < 0 e f 109 , − 109 , 1097 = 6 ·
√ √
36 7
2 7
√
√
> 0 são os valores mı́nimo e máximo, respectivamente.
+
109
109
15. Obter, via Multiplicadores de Lagrange, o ponto dos planos x + 2y + 3z = 8 e z = x mais
próximo da origem.
Resolução:
Note primeiramente que a interseção de tais planos é a reta
r : (0, 4, 0) + x(1, −2, 1) ∀x ∈ R.
Existe assim o ponto mais próximo da origem (mas não, obviamente, o mais distante).
Vamos minimizar a função f(x, y, z) = d(x, y, z)2 = x2 + y2 + z2 restrita a g(x, y, z) =
x − z = 0 e h(x, y, z) = x + 2y + 3z = 8. Daı́, do sistema
(2x, 2y, 2z) = λ(1, 0, −1) + µ(1, 2, 3) e z = x,
24
Via Geometria Analı́tica, a distância do ponto (x0 , y0 ) a reta αx + βy + c = 0 é dada por d =
|αx0 +βy0 +c|
√
α2 +β2
.
3.5. EXERCÍCIOS - CÁLCULO DIFERENCIAL
103
segue que λ + µ = 2x, µ = y e −λ + 3µ = 2z = 2x. Destas equações, adicionando a
primeira a última e usando a segunda, temos x = µ = y. Substituindo então z = x = y
na equação x + 2y + 3z = 8, temos que x = y = z = 34 . Logo (4/3, 4/3, 4/3) é o ponto da
interseção dos planos x + 2y +
p3z = 8 e x −4√z3 = 0 mais próximo da origem (com distância
dada por d(4/3, 4/3, 4/3) = 3(4/3)2 = 3 u.c.).
Tendo resolvido a questão, vamos usar Geometria Analı́tica para confirmar a solução
encontrada. Assim, na equação da reta r obtida no inı́cio da resolução anterior, note que
P0 = (0, 4, 0) e ~v = (1, −2, 1) são, respectivamente, um ponto e um vetor diretor de r.
Para obtermos a distância da origem O = (0, 0, 0) a r, sendo ~u o vetor cujas extremidades
são os pontos P0 e O, basta calcularmos a norma do vetor
~u − proj~v ~u.
(Veja figura 3.8.) Calculando primeiramente a projeção ortogonal
~u · ~v
8
4 8 4
~v = ~v =
,− ,
proj~v ~u =
||~v||2
6
3 3 3
de ~u sobre ~v, segue que a distância de O a r é dada por
√
||(−4/3, −4/3, −4/3)|| = 4 3/3 u.c..
O
~
u
P0
~
u
u − proj~v ~
11
00
00
11
00
11
~v
u
proj~v ~
Figura 3.8: ~u − proj~v ~u é perpendicular a ~v.
104
CAPÍTULO 3. RESULTADOS - CÁLCULO DIFERENCIAL
Capı́tulo 4
Resultados - Cálculo Integral
“Eudoxus developed a system
for calculating areas enclosed by
general curves, such as a circle,
by removing the areas within
them, such as rectangles or
other shapes whose areas are
simple to calculate, until the
total area to be calculated is
“exhausted”. Thus the area can
be calculated by a close
approximation.”
Zvi Artstein
De certa forma, integrar uma função de várias variáveis é proceder de maneira análoga, mas
inversa, daquela estabelecida na derivação parcial mista. Assim, por exemplo, para calcular
a derivada parcial de uma função f(x, y) em relação a x, desde que seja possı́vel calcular fx ,
derive f em relação a variável x como no Cálculo de Uma Variável Real (Cálculo I), partindo da
premissa de que y é uma constante. Depois, para calcular fxy , supondo que exista tal derivada,
considere x constante, y variável e derive fx em relação a y como no Cálculo I. Agora, para
integrar f(x, y), sejam x e y, respectivamente, variável e constante. Então, se for possı́vel,
integre f como função apenas de x como no Cálculo I. Para concluir, caso seja possı́vel, integre
(como no Cálculo I) o resultado da integração anterior como uma função apenas da variável y.
Simples assim.
4.1
Integrais Duplas
No Cálculo Integral de Funções y = f(x) Reais de Uma Variável Real, se f é Integrável, então
a Integral (Simples) é calculada sobre um Intervalo Fechado e Limitado Dx = [a, b], isto é,
R
Rb
calculamos Dx f(x) dx = a f(x) dx.1
b
t
a
t
1
Confira Parte II da lista de exercı́cios intitulada Fundamentos de Cálculo de Uma Variável da
Introdução destas NA.
105
106
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
No Cálculo Integral de Funções z = f(x, y) Reais de Duas Variáveis Reais, se f é Integrável,
então a Integral (Dupla) é calculada
sobre um Domı́nio Fechado e Limitado Dxy adequado (veja
RR
figura 4.1), isto é, calculamos Dxy f(x, y)dxdy, do modo que descreveremos a partir de agora.
Y
Y
d
g2 (x)
h1 (y)
Dxy
g1 (x)
a
Dxy
h2 (y)
c
b
X
X
Figura 4.1: Tipos 1 e 2 de Regiões de Integração Dxy .
4.1.1
Regiões/Domı́nios de Integração Dxy
Embora o compacto Dxy possa ter inúmeras formas, temos duas formas básicas nas quais muitos
tais domı́nios mais gerais podem ser subdivididos.
Domı́nios dos Tipos 1 e 2
Tipo 1 Para Dxy = (x, y) ∈ R2 a ≤ x ≤ b, g1 (x) ≤ y ≤ g2 (x) com g1 (x) e g2 (x) contı́nuas,
!
Z
ZZ
Z
x=b
y=g2 (x)
x=a
y=g1 (x)
f(x, y) dxdy :=
Dxy
f(x, y) dy
dx.
Note que, na integral entre parênteses, x é constante e y é variável.
Tipo 2 Para Dxy = (x, y) ∈ R2 h1 (y) ≤ x ≤ h2 (y), c ≤ y ≤ d com h1 (y) e h2 (y) contı́nuas,
!
Z
ZZ
Z
y=d
x=h2 (y)
y=c
x=h1 (y)
f(x, y) dxdy :=
Dxy
f(x, y) dx
dy.
Note que, na integral entre parênteses, x é variável e y é constante.
Exemplo
Vamos integrar f(x, y) = 1 sobre a região Dxy limitada por y = x e y = x2 como ilustrada
abaixo.
4.1. INTEGRAIS DUPLAS
107
(0, 1)
(1, 1)
(0, 0)
Note que (x, y) ∈ Dxy se, e somente se,
0 ≤ x ≤ 1 e x2 ≤ y ≤ x ou y ≤ x ≤
√
y e 0 ≤ y ≤ 1.
No primeiro caso, Dxy é do tipo 1. No segundo, do tipo 2. Então, integrando primeiro em
relação a y para Dxy do tipo 1, temos
ZZ
1 dxdy =
Dxy
Z x=1 Z y=x
x=0
=
Z x=1
x=0
=
Z x=1
x=0
2
y=x2
y=x
y y=x2 dx
x − x2 dx
x
x3
=
−
2
3
1
= .
6
1 dy dx
x=1
x=0
Agora, integrando primeiro em relação a x para Dxy do tipo 2, temos
ZZ
1 dxdy =
Dxy
Z y=1 Z x=√y
y=0
=
Z y=1
y=0
=
Z y=1
1 dx
x=y
!
dy
x=√y
x x=y dy
√
( y − y) dy
y=0
2y3/2 y2
=
−
3
2
1
= .
6
y=1
y=0
Notação/Observação
Em sendo possı́vel calcular a integral dupla, podemos desconsiderar os parênteses nas fórmulas
acima. Contudo, pode não ser possı́vel calcular a intergral dupla. Como veremos nos exercı́cios
2 e 3 que seguem o próximo exemplo, pode ocorrer da integral de um dos dois tipos ou ser mais
difı́cil de resolver que a do outro tipo ou não ter solução analı́tica.
108
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Exemplo
Integrar sobre o retângulo
significa calcular
ZZ
Dxy
Dxy = [a, b] × [c, d]
= (x, y) ∈ R2 a ≤ x ≤ b, c ≤ y ≤ d
f(x, y) dxdy =
Z b Z d
a
c
Z d Z b
f(x, y) dy dx =
f(x, y) dx dy.
c
a
A figura dada a seguir é uma representação geométrica de um Dxy no Primeiro Quadrante com
d − c > b − a.
Y
d
Dxy
c
a
b
X
Exercı́cios
1. Se Dxy = [0, 1] × [2, 3], calcule
RR
Dxy
3x2 + 2y dxdy.
2. Se existir, calcule a integral de f(x, y) = 2x2 y sobre a região limitada pela parábola
y = 4 − x2 e pela reta y = 0.
Resposta: 19, 5, aproximadamente.
2
3. Se existir, calcule a integral de f(x, y) = ey + x sobre a região limitada pelas retas x = 0,
4
y = 2 e y = x.
Resposta: 56 + e2 .
4.1. INTEGRAIS DUPLAS
109
Esta é uma representação geométrica dos domı́nios de integração para os exercı́cios 1, 2 e 3,
respectivamente, e dos eixos coordenados, na mesma escala de medida. Ainda, em relação aos
dois últimos
note que:
exercı́cios,
2
2.
D
=
(x,
y)
−
2
≤
x
≤
2,
0
≤
y
≤
4
−
x
é o domı́nio do tipo 1, enquanto que Dxy =
xy
√
√
(x, y) − 4 − y ≤ x ≤ 4 − y, 0 ≤ y ≤ 4 é o do 2. Aqui, a integração sobre o do tipo 1 é
mais fácil que a do 2.
3. Ao se tentar integrar primeiro em relação a y, isto é, integrar sobre a região do tipo 1, não
2
se obtem uma resolução analı́tica devido a ey + x não ter antiderivada elementar.
Regiões Dxy Mais Gerais
RR
f(x, y) dxdy, pode ser necessário dividir o seu domı́nio
Para calcular a integral dupla I =
Dxy
de integração Dxy em n partes disjuntas dos tipos 1 ou 2, calcular a integral dupla Ii relativa
a i-ésima parte para i = 1, . . . , n e, por fim, obter a soma I = I1 + · · · + In .
Exemplo
Vamos integrar f(x, y) = 2x+y sobre a região limitada por x = y2 , y = x−2 e y = x3 , conforme
a ilustração que segue.
2
1
0
−1
0
0.5
1
1.5
2
2.5
3
3.5
A primeira tarefa é obter os pontos de interseção dos gráficos das três funções. As resoluções
das equações y = y2 − 2, y = y32 e x − 2 = x3 nos fornecem os seguintes três pontos de interseção
√ √ 3
32 , 3 3 .
para a região de interesse: (1, −1), (3, 1) e
Para integramos primeiro em y, devemos separar
subregião
para
Dxy em três partes: a primeira
x ∈ [0, 1], a segunda subregião para x ∈ 1, 32/3 , e a terceira para x ∈ 32/3 , 3 . Isto porque
em cada um desses pontos a função que define ou o limite superior ou o limite inferior para y
muda. Na outra direção, é necessário separar Dxy em apenas duas partes. Logo, vamos resolver
aqui com o menor número de integrais:
ZZ
I=
(2x + y) dxdy
Dxy
!
3
Z
Z
Z
Z √
y=1
y=
x=y+2
=
(2x + y) dx
y=−1
= I1 + I2 .
x=y2
3
x=3/y
(2x + y) dx
dy +
y=1
x=y2
dy
110
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
A primeira parcela é calculada por
I1 =
Z y=1
y=−1
=
Z y=1
x=y+2
x2 + xy x=y2 dy
(y + 2)2 + y(y + 2) − y4 − y3 dy
y=−1
=
Z y=1
−y4 − y3 + 2y2 + 6y + 4 dy
y=−1
= 8, 93̄.
A segunda parcela é calculada por
I2 =
3
Z y= √
3
y=1
3
Z y= √
3
x=3/y
x2 + xy x=y2 dy
9
+ 3 − y4 − y3 dy
2
y
y=1
3
y= √
3
9
y5 y4 = − + 3y −
− y
5
4 y=1
=
≈ 2, 21.
A soma das duas parcelas resulta em I ≈ 11, 14.
4.1.2
Área, Volume e Massa
Se f(x, y) = 1, então as Integrais Duplas Calculam a Área da Região Dxy .
Tal fato é decorrente de outro que será logo estabelecido: A integral dupla de uma função
positiva integrável calcula o volume da região entre o gráfico de tal função e Dxy .
Exemplo
Seja Dxy = (x, y) ∈ R2 x2 + y2 ≤ r2 o cı́rculo de centro na origem e raio r (como representado na ilustração seguinte).
Y
r
−r
Dxy
−r
y=
√
r2 − x 2
r X
√
y = − r2 − x 2
4.1. INTEGRAIS DUPLAS
111
Então a sua área é calculada por
ZZ
1 dxdy =
Dxy
=
Z x=r
x=−r
Z x=r
Z y=√r2 −x2
=2
x=−r
= −2r
2
1 dy
√
y=− r2 −y2
y=√r2 −x2
y y=−√r2 −x2 dx
x=−r
Z x=r
!
dx
p
r2 − x2 dx
Z θ=0
sen2 θ dθ
θ=π
2
= πr u.a..
Note que, na penúltima e última igualdades acima, usamos a mudança de variáveis
e a integral imediata
respectivamente.
x = r cos θ ⇒ dx = −r sen θ dθ
R
sen2 θ dθ =
θ
2
−
sen 2θ
4
,
Exercı́cio
Calcule a área da região no Primeiro Quadrante limitada pelas retas y = x, y =
x
2
ey=
3x
2
− 12 .
Se f(x, y) ≥ 0, então as Integrais Duplas Calculam o Volume da Região Limitada
pelo Gráfico de f(x, y) e pelo Plano OXY, (x, y) ∈ Dxy .
Tal propriedade é análoga aquela do Cálculo de Funções Reais de Uma Variável Real:
Se f(x) ≥ 0, então as Integrais Simples Calculam a Área da Região Limitada pelo
Gráfico de f(x) e pela Reta OX, x ∈ Dx = [a, b].2
Rb
Bom, a f(x) dx pode ser interpretada como a soma de uma infinidade de parcelas “f(x)dx”. Por
sua vez, cada uma destas parcelas representa a área do retângulo de altura f(x)
R R e base infinitef(x, y) dxdy
simal “dx”. Podemos ter uma interpretação análoga para integrais duplas.
Dxy
representa a soma de uma infinidade de parcelas “f(x, y)dxdy”. Cada uma destas parcelas
representa o volume de uma caixa retangular de altura f(x, y) e base infinitesimal “dxdy”.
Exercı́cios
1. Obter o volume do sólido limitado pelos planos 4x + 2y + z = 10, y = 3x, z = 0 e x = 0.
2. Obter o volume do sólido limitado superiormente pela superfı́cie z = 8xy + 200 e inferiormente pela região do plano OXY limitada por y = x2 e y = 8 − x2 .
2
Confira Parte II da lista de exercı́cios intitulada Fundamentos de Cálculo de Uma Variável da
Introdução destas NA.
112
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Centro de Massa
Sendo µ(x, y) a densidade
RR superficial no ponto (x, y) e D = Dxy , temos que a massa de
D
µ(x,RR
y)dxdy e o centro de massa (x̄, ȳ) de D é dado por x̄ =
D
RR é dada por M(D) =
xµ(x, y) dxdy/M(D) e ȳ = D yµ(x, y)
D
RRdxdy/M(D); sendo µ(x,
RR y) constante, o centro
de massa (centróide) de D é dado por x̄ = D x dxdy/A(D) e ȳ = D y dxdy/A(D), sendo
A(D) a área da região D.
Exercı́cios
1. Obter o centro de massa do retângulo [0, 1] × [0, 1] se a densidade de massa é:
(a) constante;
(b) µ(x, y) = ex+y .
2. Verifique que (0, 0) é o centróide do triângulo equilátero inscrito na circunferência x2 +y2 =
1 e com um dos vértices em (0, 1).
4.1.3
Mudança de Variáveis nas Integrais Duplas
Integração por Substituição
No Cálculo de Uma Função Real de Uma Variável Real, para f(x) contı́nua num domı́nio Dx ,
sendo que entre Dx e um domı́nio Du adequado existe uma bijeção x = x(u) com derivada
contı́nua e não nula em Du , temos
Z
Z
dx
du.3
f(x) dx =
f(x(u))
du
Dx
Du
Por exemplo, se f(x) = cos x e x = u2 , então
Z √π/2
Z π/2
cos u2 2u du.
cos x dx =
0
0
No Cálculo de Uma Função Real de Duas Variáveis Reais, para f(x, y) contı́nua num domı́nio
Dxy , sendo que entre Dxy e um domı́nio Duv adequado existe uma bijeção (x, y) = (x(u, v), y(u, v))
com derivadas parciais de primeira ordem contı́nuas e Jacobiano
∂(x, y) xu xv =
∂(u, v) yu yv = xu yv − yu xv
6= 0
em Duv , temos
ZZ
f(x, y) dxdy =
Dxy
ZZ
∂(x, y) dudv.
f(x(u, v), y(u, v)) ∂(u, v) Duv
Por outro lado, pode ser mais conveniente calcular o Jacobiano via
−1
∂(u,v)
∂(x,y)
=
.
∂(x,y)
∂(u,v)
3
Confira Parte II da lista de exercı́cios intitulada Fundamentos de Cálculo de Uma Variável da
Introdução destas NA.
4.1. INTEGRAIS DUPLAS
113
Exemplo
Vamos usar uma mudança de coordenadas adequada para obter o volume da região localizada
abaixo da superfı́cie z = (x − y)2 e acima do plano OXY, cujos pontos, neste plano, pertencem
ao paralelogramo de vértices (0, 0), (1, 1), (2, 0) e (1, −1). Assim, pela figura 4.2, como 0 ≤
V
y=x
y = −x + 2
Y
Dxy
u=x−y
v=x+y
v=2
Duv
u=0
X
u=2
y=x−2
U
v=0
y = −x
Figura 4.2: Mudança de Variáveis: Integral mais Fácil!
x − y ≤ 2 e 0 ≤ x + y ≤ 2, se u = x − y e v = x + y, então 0 ≤ u ≤ 2 e 0 ≤ v ≤ 2. Por outro
lado, x = u+v
e y = v−u
. Daı́
2
2
∂(x, y) 1/2 1/2 =
∂(u, v) −1/2 1/2 1 1
= +
4 4
1
= .
2
Por outro lado, apenas para confirmar o cálculo do Jacobiano, como
∂(u, v) 1 −1 =
∂(x, y) 1 1 =1+1
= 2,
temos que
1
∂(x, y)
= .
∂(u, v)
2
Assim, o volume é dado por
ZZ
2
(x − y) dxdy =
Dxy
ZZ
Duv
u2 ·
Z 2Z 2
1
dudv
2
1
u2 dudv
2 0 0
Z
1 2 3 u=2
=
u u=0 dv
6 0
8 v=2
= v v=0
6
8
= u.v..
3
=
114
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Observação
Sem qualquer dúvida, a maior utilidade da fórmula de mudança de variáveis para integrais
duplas é sua aplicação quando mudamos de coordenadas cartesianas para polares. Neste caso,
em geral, a fronteira de Dxy tem partes curvilı́neas. Ao procedermos tal mudança de variáveis,
podemos obter um novo domı́nio de integração cuja fronteira tem apenas partes retilı́neas.
Coordenadas Polares: Mudança de Dxy para Drθ
t(x, y)
✁
✁
✁
r ✁
✁
✁
✁
✁
y
✁
✁ θ
x
Sendo r a distância de (x, y) a (0, 0) e θ o ângulo que o eixo OX faz com a reta que passa por
(0, 0) e (x, y), temos:
1. x = r cos θ, y = r sen θ, r =
2.
3.
∂(x,y)
∂(r,θ)
RR
cos θ −r sen θ
= sen θ r cos θ
f(x, y) dxdy =
Dxy
RR
p
x2 + y2 e θ = arctg yx ;
= r cos2 θ + sen2 θ = r;
Drθ
f(r cos θ, r sen θ) rdrdθ .
Tal integral pode ser calculada por
Z θ2
θ1
Z r=r2 (θ)
f(r cos θ, r sen θ) rdr
r=r1 (θ)
!
dθ,
caso θ ∈ [θ1 , θ2 ] e r1 (θ) ≤ r ≤ r2 (θ), ou por
Z r2
r1
Z θ=θ2 (r)
θ=θ1 (r)
f(r cos θ, r sen θ) dθ
!
rdr,
caso r ∈ [r1 , r2 ] e θ1 (r) ≤ θ ≤ θ2 (r).
Exemplo
Sejam f(x, y) = 2x + 3y2 e Dxy = (x, y) ∈ R2 1 ≤ x2 + y2 ≤ 4 . (Veja figura 4.3.) Então:
f(r cos θ, r sen θ) = 2r cos θ + 3r2 sen2 θ; Drθ = (r, θ) ∈ R2 1 ≤ r ≤ 2, 0 ≤ θ ≤ 2π ;
4.1. INTEGRAIS DUPLAS
115
Θ
Y
1111
0000
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
00002
1111
1
2π
111111111111111
000000000000000
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000 2 X
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
000000000000000
111111111111111
x = r cos θ, y = r sin θ
R
Figura 4.3: Mudança de Variáveis: De Cartesianas para Polares
ZZ
f(x, y) dxdy =
Dxy
=
=
=
ZZ
f(r cos θ, r sen θ) rdrdθ
Drθ
Z r=2 Z θ=2π
r=1
Z r=2
r=1
Z2
2
2
2r cos θ + 3r sen θ dθ
θ=0
2
2r sen θ + 3r
3
θ sen 2θ
−
2
4
rdr
θ=2π
dr
dθ,
θ=0
3πr3 dr
1
=
=
45π
4
Z θ=2π Z r=2
θ=0
2
2
2r cos θ + 3r sen θ rdr
r=1
onde a verificação da última igualdade fica como exercı́cio.
Exercı́cios
RR
2
2
1. Para Dxy = (x, y) ∈ R2 x2 + y2 ≤ 1 , calcule Dxy ex +y dxdy.
2. Seja Dxy a região triangular do primeiro quadrante limitada pelas retas y = x, y = 0 e
base×altura
(da área de um triângulo) da Geometria Plana ou
x = 1. Usando a fórmula
2
RR
calculando a integral Dxy dxdy apenas em coordenadas cartesianas, sem mudança de
variáveis, obtemos facilmente que a área de Dxy é dada por 12 u.a. Verifique tal resultado
fazendo a mudança de variáveis para coordenadas polares na integral dupla anterior.
3. Verifique, via integrais duplas, que o volume de uma esfera de raio r0 é dado por 43 πr30 .
4. Obtenha o volume da região limitada pela esfera x2 + y2 + z2 = 9, acima do plano z = 0
e interior ao cilindro x2 + y2 = 5.
116
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
5. Se (r, θ) representa um ponto em coordenadas polares, determine a área da região interior
a r = 3 + 2 sen θ e exterior a r = 2.
6. Se (r, θ) representa um ponto em coordenadas polares, calcule a área da região limitada
pela curva r = a sen(3θ), a > 0.
4.1.4
Outros Exercı́cios
Além dos exercı́cios que fazem parte deste manual, resolva exercı́cios sobre Integrais Duplas de
outros livros de Cálculo. Por exemplo, dos livros dados como referências no capı́tulo 1 destas
NA.
4.2. INTEGRAIS TRIPLAS
4.2
4.2.1
117
Integrais Triplas
Funções Contı́nuas f(x, y, z) sobre Regiões Dxyz do Tipo 1
Em analogia as integrais duplas, para funções u1 (x, y) e u2 (x, y) contı́nuas (veja figura 4.4) e
Z
z = u2 (x, y)
1
0
0
1
1
0
1
0
1
0
0
1
1
0
0
1
z = u1 (x, y)
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
Y
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
X
Figura 4.4:
u2 (x, y).
Dxy
Dxyz é constı́tuido dos pontos (x, y, z) tais que (x, y) ∈ Dxy e u1 (x, y) ≤ z ≤
o domı́nio
Dxyz = (x, y, z) ∈ R3 (x, y) ∈ Dxy , u1 (x, y) ≤ z ≤ u2 (x, y)
de f, temos que f é integrável e
ZZZ
f(x, y, z) dxdydz =
Dxyz
ZZ
Dxy
Z z=u2 (x,y)
z=u1 (x,y)
!
f(x, y, z) dz
dxdy.
O integrando da integral dupla anterior é uma integral simples, que deve ser a primeira a ser
calculada, como no Cálculo de Uma Variável, para z variável e x e y constantes. Então, o
resultado de tal integração é uma função nas (agora) variáveis x e y. Para concluir, calcule a
integral dupla de tal função como temos feito até o presente momento.
Exemplo
RRR
Vamos calcular
2x dxdydz tal que Dxyz é a região do Primeiro Octante abaixo do plano
Dxyz
2x + 3y + z = 6. Então, Dxy é a região do Primeiro Quadrante abaixo da reta y = − 23 x + 2
(veja figura 4.5) e
118
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Z
6
z = 6 − 2x − 3y
Y
2
Y
3
X
y = − 32 x + 2
2
3
X
Figura
Dxyz
=
(x, y,z) (x, y) ∈ Dxy , 0 ≤ z ≤ 6 − 2x − 3y
4.5:
(x, y) 0 ≤ x ≤ 3, 0 ≤ y ≤ − 32 x + 2 .
ZZZ
2x dxdydz =
Dxyz
=
=
ZZ
ZZ
Dxy
Dxy
Z z=6−2x−3y
z=0
3
!
2x(6 − 2x − 3y) dy
y=0
x=0
Z x=3
2x dz dxdy
z=6−2x−3y
dxdy
2xz z=0
Z x=3 Z y=− 2 x+2
com
dx
y=− 2 x+2
12xy − 4x2 y − 3xy2 y=0 3 dx
x=0
Z x=3 4 3
2
=
x − 8x + 12x dx
3
x=0
4
x=3
x
8x3
2
=
−
+ 6x
3
3
x=0
= 27 − 72 + 54
= 9.
=
4.2.2
Regiões dos Tipos 2 e 3
Em analogia a Região do Tipo 1, temos ainda as Regiões dos seguintes Tipos:
Tipo 2: Sendo v1 (y, z) e v2 (y, z) contı́nuas e
Dxyz = (x, y, z) ∈ R3 (y, z) ∈ Dyz , v1 (y, z) ≤ x ≤ v2 (y, z) ,
f é integrável e
ZZZ
f(x, y, z) dxdydz =
Dxyz
ZZ
Dyz
Z x=v2 (y,z)
x=v1 (y,z)
f(x, y, z) dx
!
dydz.
Dxy
=
4.2. INTEGRAIS TRIPLAS
119
Tipo 3: Sendo w1 (x, z) e w2 (x, z) contı́nuas e
Dxyz = (x, y, z) ∈ R3 (x, z) ∈ Dxz , w1 (x, z) ≤ y ≤ w2 (x, z) ,
f é integrável e
ZZZ
f(x, y, z) dxdydz =
Dxyz
ZZ
Dxz
Z y=w2 (x,z)
!
f(x, y, z) dy
y=w1 (x,z)
dxdz.
Exercı́cio
Sendo Dxyz limitada por y = 2x2 + 2z2 e o plano y = 8, calcule
ZZZ
p
3x2 + 3z2 dxdydz.
Dxyz
Observação
Se Dxyz = [a, b] × [c, d] × [m, n] então
ZZZ
Z x=b Z y=d Z z=n
f(x, y, z) dxdydz =
f(x, y, z) dz dy dx
x=a
Dxyz
y=c
z=m
ou pode ser calculada em qualquer outra ordem.
Exercı́cio
Para Dxyz = [2, 3] × [1, 2] × [0, 1], calcule
Observação
Se f(x, y, z) = 1, então
Exercı́cios
RRR
Dxyz
RRR
Dxyz
8xyz dxdydz
f(x, y, z) dxdydz calcula o volume da região Dxyz .
1. Via integrais triplas, obter o volume do sólido limitado pelos planos 4x + 2y + z = 10,
y = 3x, z = 0 e x = 0.
2. Via integrais triplas, determinar o volume de uma cunha cortada do cilindro x2 + y2 = 1
pelos planos z = −y e z = 0.
4.2.3
Mudança de Variáveis nas Integrais Triplas
Integração por Substituição
Para uma função f(x, y, z) contı́nua num domı́nio Dxyz , sendo que entre Dxyz e um domı́nio Duvw
existe uma correspondência biunı́voca dada por x = x(u, v, w), y = y(u, v, w) e z = z(u, v, w),
com derivadas parciais de primeira ordem contı́nuas e Jacobiano
xu xv xw ∂(x, y, z)
= yu yv yw 6= 0
∂(u, v, w) zu zv zw 120
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
em Duvw , temos
ZZZ
ZZZ
f(x, y, z) dxdydz =
Dxyz
∂(x, y, z) dudvdw.
f(x(u, v, w), y(u, v, w), z(u, v, w)) ∂(u,
v,
w)
Duvw
Mudança para Coordenads Cilı́dricas/Esféricas: De Dxyz para Drθz /Dρφθ
Z
Z
z
φ
ρ
Y
θ
r
X
θ
Y
r
X
Figura 4.6: Coordenadas Cilı́ndricas e Esféricas.
Cilı́ndricas
De x = r cos θ, y = r sen θ e z = z temos
e
ZZZ
cos θ −r sen θ 0 ∂(x, y, z) = sen θ r cos θ 0 = r
∂(r, θ, z) 0
0
1 f(x, y, z) dxdydz =
Dxyz
ZZZ
f(r cos θ, r sen θ, z) rdrdθdz.
Drθz
Exercı́cios
Via integrais triplas:
1. Verificar que o volume do cone circular reto de raio R e altura h é
πR2 h
;
3
2. Calcular o volume do parabolóide z = a(x2 + y2 ) de altura h;
3. Obtenha o volume da calota esférica que representa a interseção da esfera x2 +y2 +z2 ≤ R2
com o semi-espaço z ≥ a, 0 < a < R.
Esféricas
De x = ρ sen φ cos θ, y = ρ sen φ sen θ e z = ρ cos φ, onde ρ ≥ 0, φ ∈ [0, π] e θ ∈ [0, 2π], temos
sen φ cos θ ρ cos φ cos θ −ρ sen φ sen θ ∂(x, y, z)
= sen φ sen θ ρ cos φ sen θ ρ sen φ cos θ = ρ2 sen φ
∂(ρ, φ, θ) cos φ
−ρ sen φ
0
4.2. INTEGRAIS TRIPLAS
121
e
ZZZ
f(x, y, z) dxdydz =
Dxyz
ZZZ
f(ρ sen φ cos θ, ρ sen φ sen θ, ρ cos φ) ρ2 sen φ dρdφdθ.
Dρφθ
Exemplo
2
2
2
u.v. De fato, se os pontos (x, y, z) de
O volume do elipsóide ax2 + yb2 + cz2 ≤ 1 é dado por 4πabc
3
y2
z2
x2
Dxyz satisfazem a equação a2 + b2 + c2 ≤ 1, a mudança de variáveis
x = au, y = bv e z = cw
acarreta um outro domı́nio Duvw dos pontos (u, v, w) que satisfazem a equação u2 +y2 +z2 ≤ 1.
∂(x,y,z)
= abc e
(A mudança transforma o elipsóide numa esfera de raio unitário.) Daı́ ∂(u,v,w)
volume =
ZZZ
dxdydz
Dxyz
= abc
ZZZ
dudvdw.
Duvw
Assim, para pontos (ρ, φ, θ) de Dρφθ tais que ρ2 ≤ 1, φ ∈ [0, π] e θ ∈ [0, 2π], temos
ZZZ
volume = abc
ρ2 sen φ dρdφdθ
= abc
Z1
0
Dρφθ
2
ρ dρ
Zπ
0
1
· 2 · 2π
3
4πabc
=
u.v.
3
sen φ dφ
Z 2π
dθ
0
= abc ·
Exercı́cios
1. Calcule o volume do sólido limitado inferiormente pelo plano OXY, lateralmente pela
esfera ρ = 2 e superiormente pelo cone φ = π3 .
2. Obter o volume do sólido limitado inferiormente pelo cone φ ≤
esfera ρ ≤ 2R cos φ.
π
4
e superiormente pela
3. Via coordenadas esféricas, obter o volume do sólido limitado superiormente pela esfera
x2 + y2 + z2 ≤ R2 e inferiormente pelo cone z2 = m2 (x2 + y2 ), z ≥ 0.
4.2.4
Outros Exercı́cios
Resolva, além dos nossos, exercı́cios sobre Integrais Triplas de outros livros de Cálculo. Por
exemplo, nos livros dados como referências no Capı́tulo 1 destas NA.
122
4.3
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Formulário - Cálculo Integral - Integrais Duplas
2
1. Sendo g1 (x) e g2 (x) contı́nuas,
D
=
(x,
y)
∈
R
a
≤
x
≤
b,
g
(x)
≤
y
≤
g
(x)
, temos
xy
1
2
Rx=b Ry=g2 (x)
RR
f(x, y) dxdy = x=a y=g1 (x) f(x, y) dy dx.
Dxy
2. Sendo h1 (y) e h2 (y) contı́nuas,Dxy = (x, y) ∈ R2 h1 (y) ≤ x ≤ h2 (y), c ≤ y ≤ d , teRR
Ry=d Rx=h (y)
mos Dxy f(x, y) dxdy = y=c x=h12(y) f(x, y) dx dy.
3. Para f(x, y) contı́nua num domı́nio Dxy , sendo que entre Dxy e um domı́nio Duv existe uma
correspondência biunı́voca dada por x = x(u, v) e y = y(u, v), com derivadas parciais de
primeira ordem contı́nuas e Jacobiano
∂(x, y)
= xu yv − yu xv 6= 0
∂(u, v)
em Duv , temos
ZZ
f(x, y) dxdy =
Dxy
ZZ
∂(x, y) dudv.
f(x(u, v), y(u, v)) ∂(u, v)
Duv
Pode ser mais conveniente obter o Jacobiano via
4. Do ı́tem anterior,
RR
f(x, y) dxdy =
Dxy
RR
Drθ
∂(u,v)
∂(x,y)
=
∂(x,y)
∂(u,v)
−1
.
f(r cos θ, r sen θ) rdrdθ.
5. Se f(x, y) = 1 nas fórmulas acima, as integrais calculam a área de Dxy .
6. Se f(x, y) ≥ 0 nas fórmulas acima, as integrais calculam o volume da região do espaço
limitada pelo gráfico de f(x, y) e o plano OXY, para (x, y) ∈ Dxy .
7. Sendo µ(x, y) a densidade superficial
no ponto (x, y) e D ⊂ R2 , temos que a massa
RR
µ(x, y) dxdy,
de D é dada
D
RR o centro de massa (x̄, ȳ) de D é dado
RR por M(D) =
yµ(x, y) dxdy/M(D),
e, sendo µ(x, y)
xµ(x,
y)
dxdy/M(D)
e
ȳ
=
por x̄ =
D
D
RR
constante, o centro de massa (centróide) de D é dado por x̄ = D x dxdy/A(D) e ȳ =
RR
y dxdy/A(D), sendo A(D) a área da região D.
D
4.4. FORMULÁRIO - CÁLCULO INTEGRAL - INTEGRAIS TRIPLAS
4.4
Formulário - Cálculo Integral - Integrais Triplas
1. Para funções contı́nuas definidas em domı́nios Dxyz adequados, a integral
ZZZ
f(x, y, z) dxdydz
Dxyz
é igual a alguma das seguintes integrais:
ZZ
ZZZ
Z x=v2 (y,z)
x=v1 (y,z)
Dyz
Dxz
ZZZ
Z y=w2 (x,z)
y=w1 (x,z)
!
dxdy;
!
dydz;
!
dxdz;
f(x, y, z) dz
z=u1 (x,y)
Dxy
ZZ
ZZ
Z z=u2 (x,y)
f(x, y, z) dx
f(x, y, z) dy
f(r cos θ, r sen θ, z) rdrdθdz;
Drθz
f(ρ sen φ cos θ, ρ sen φ sen θ, ρ cos φ)ρ2 sen φ dρdφdθ.
Dρφθ
2. Se f(x, y, z) = 1 a integral acima calcula o volume da região Dxyz .
123
124
4.5
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Exercı́cios - Cálculo Integral
1. Calcule a integral dupla de f(x, y) = e−x−y sobre a região Dxy do primeiro quadrante na
qual x + y ≤ 1.
Resolução:
Dxy é limitada pelo triângulo retângulo de base e altura unitárias, cujos vértices são os
pontos de interseção das retas x = 0, y = 0 e x + y = 1, como representada a seguir.
1
Y
x+y=1
x=0
Dxy
y=0
O
1
X
Pela simetria tanto de Dxy quanto de f(x, y), em tendo resolução analı́tica, podemos
calcular a integral considerando Dxy como sendo do tipo 1 ou do tipo 2. Tanto faz! A
integral daı́ é dada por
ZZ
Z x=1 Z y=1−x
−x−y
−x −y
e
dydx =
e e dy dx
x=0
Dxy
=
=
Z x=1
x=0
Z x=1
x=0
=
Z x=1
x=0
y=0
y=1−x
e−x [−e−y ]y=0
dx
e−x 1 − e−(1−x) dx
e−x − e−1 dx
= 1 − 2e−1 .
2. Calcule a área da região no Primeiro Quadrante limitada pelas retas y = x, y =
y = 3x
− 12 .
2
Resolução:
1
Y
y=x
y=
3x−1
2
1
4
y=
O
x
2
1
2
1
X
x
2
e
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
125
Na ilustração anterior, vemos que a representação geométrica da região Dxy é um triângulo.
Agora, por um lado,
(x, y) ∈ Dxy
3x − 1
x
1
1
,1 ,
≤ y ≤ x.
, ≤ y ≤ x ou x ∈
x ∈ 0,
2
2
2
2
⇔
Por outro lado, a área pode ser calculada pela integral dupla
ZZ
1 dxdy =
Dxy
Z x=1/2 Z y=x
x=0
=
Z x=1/2 x=0
y=x/2
x−
Z x=1 Z y=x
1 dy dx +
x
2
x=1/2
dx +
Z x=1 x=1/2
x=1/2 2
x
x
x2 x2
−
=
+ − +
2
4 x=0
4
2
1
1 1
1
1
1
− + +
−
= −
8 16 4 2 16 4
1
u.a..
=
8
y=(3x−1)/2
x 1
− +
2 2
x=1
1 dy dx
dx
x=1/2
√
√ u.c.),
De fato, tal área é igual a metade do produto da base (= 2 u.c.) pela altura (= 1/4
2
1 1
esta última calculada pela distância do ponto (x0 , y0 ) = 2 , 4 a reta ax + by + c = 0
com a = 1, b = −1 e c = 0 por
1
1 · − 1 · 1 + 0
|ax0 + by0 + c|
4
√
= p2
a2 + b2
12 + (−1)2
1 1
− = 2√ 4
2
1
= √4 u.c.
2
3. Obter o volume do sólido limitado superiormente pela superfı́cie z = 8xy + 200 e inferiormente pela região Dxy do plano OXY limitada por y = x2 e y = 8 − x2 .
Resolução:
Para começar, considere a seguinte representação geométrica de Dxy :
126
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
8
Y
y = 8 − x2
4
y = x2
−2 −1 0
1
2
X
Como região do tipo 1, temos Dxy (x, y) − 2 ≤ x ≤ 2, x2 ≤ y ≤ 8 − x2 . De fato, para
os limites da variação de x, considere x2 = 8 − x2 . Logo x = ±2. Vamos verificar agora
que z ≥ 0 em Dxy .4 De fato,
−2x2 ≤ xy ≤ 16 − 2x2 ⇒ −16x2 ≤ 8xy ≤ 128 − 16x2
⇒ −16x2 + 200 ≤ z ≤ 328 − 16x2 .
Então z ≥ 0 para x ∈ [−2, 2].
Para concluir, temos que o volume é dado por
ZZ
8xy + 200 dxdy =
Dxy
Z y=8−x2
Z x=2
=4
Z x=2
x=−2
=4
Z x=2
8xy + 200 dy
y=x2
x=−2
x=−2
!
dx
y=8−x2
xy2 + 50y y=x2 dx
64x − 16x3 + x5 + 400 − 50x2 − x5 − 50x2 dx
x=2
100x3
= 4 32x − 4x + 400x −
3
x=−2
100 · 8
100 · (−8)
= 4 400 · 2 −
− 400 · (−2) +
3
3
1600
= 4 1600 −
3
8
u.v..
= 1600 ·
3
2
4
4. Obter o centro de massa do retângulo D = [0, 1] × [0, 1] se a densidade de massa é:
(a) constante em D;
(b) µ(x, y) = ex+y em cada ponto (x, y) ∈ D.
4
Condição para que
RR
Dxy
z dxdy seja o volume procurado!
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
127
Resolução:
(a) Primeiramente calculamos a massa de D, que (nesse caso) é calculada como a área de
D mas em u.m.. Assim, M(D) = A(D) = 1. Daı́:
RR
x dxdy
x̄ = D
A(D)
Z 1Z 1
=
x dxdy
0 0
1
= ;
2
RR
y dydx
A(D)
ȳ =
D
=
Z 1Z 1
y dydx
0 0
1
= .
2
Na ilustração que segue, temos uma representação geométrica do centróide do quadrado.
Este coincide com o centro geométrico do quadrado.
1
Y
(x̄, ȳ)
0
1
X
(b) Primeiramente calculamos a massa total, isto é, o denominador de x̄ e ȳ:
ZZ
M(D) =
ex+y dxdy
D
Z 1Z 1
=
ex+y dydx
0 0
Z1
= ex [ey ]10 dx
0
Z1
= (e − 1) ex dx
0
2
= (e − 1)
u.m..
Por outro lado, o numerador de x̄ é dado por
ZZ
Z 1Z 1
x+y
xex+y dydx
xe dydx =
0 0
D
Z1
= (e − 1) xex dx,
0
128
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
que, via integração por partes,5 resulta em
!
1 Z 1
(e − 1) xex − ex dx = (e − 1)(e − e + 1)
0
0
= e − 1 u.m..
Daı́
1
≈ 0, 582
e−1
e, trocando-se os papéis de x e y acima, temos que ȳ ≈ 0, 582.
Na ilustração que segue, temos uma representação geométrica do centro de massa do quadrado. Este tem um pequeno deslocamento em relação ao centro geométrico do quadrado.
x̄ =
1
Y
(x̄, ȳ)
0
1
X
5. Verifique que (0, 0) é o centróide do triângulo equilátero inscrito na circunferência unitária
e com um dos vértices em (0, 1).
Resolução:
Primeiramente vamos determinar as retas y = ax + b que interceptam a circunferência
nos vértices do triângulo equilátero. (Para uma representação geométrica destas retas,
bem como da circunferência x2 + y2 = 1, veja a ilustração seguinte.)
√
y = − 3x + 1
Y
O
y=
√
3x + 1
X
y = − 21
Para as retas que passam por (0, 1), 1 = a · 0 + b acarreta b = 1. Daı́ tais retas são da
forma y = ax + 1, faltando determinar as inclinações a 6= 0. Para a reta com a > 0,
5
Como possivelmente
II da lista Fundamentos de Cálculo de Uma Variável da InR visto na Parte
R
trodução destas NA, udv = uv − vdu. Aqui, u = x e dv = ex dx, isto é, du = dx e v = ex .
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
129
√
√
=
−
temos que a = tan π3 = 3. Para a reta com a < 0, temos que a = tan 2π
3.
3
√
Então obtemos y = ± 3x + 1 para as duas retas com a 6= 0. Por outro
√ lado, estas duas
retas interceptam x2 + y2 = 1 nos √outros dois vértices. Então x2 + (± 3x + 1)2 = 1, isto
√
é, 4x2 ± 2 3x = 0. Logo x = ± 23 . Assim y = −1/2 é a reta com a = 0. Agora, os
denominadores de x̄ e ȳ são dados por
base · altura
A(D) =
√ 32
3· 2
=
√2
3 3
=
4
6= 0.
y−1
y−1
Seja D = (x, y) √3 ≤ x ≤ − √3 , −1/2 ≤ y ≤ 1 . (Optamos aqui pela integração sobre uma região do tipo 2!) Assim, para concluir, obtemos as coordenadas do centróide:
RR
x dxdy
x̄ = D
A(D)
Ry=1 Rx=−(y−1)/√3
√
x
dx
dy
y=−1/2
x=(y−1)/ 3
=
A(D)
R
y=1
1
(−(y − 1))2 − (y − 1)2 dy
6 y=−1/2
=
A(D)
Ry=1
0 dy
y=−1/2
=
6A(D)
0
=
6A(D)
= 0;
RR
y dxdy
ȳ = D
A(D)
R
√
Ry=1
x=−(y−1)/ 3
√
y
dx
dy
y=−1/2
x=(y−1)/ 3
=
A(D)
R
y=1
− √23 y=−1/2 y(y − 1) dy
=
A(D)
h 3
iy=1
y
y2
2 3 − 2
y=−1/2
√
=−
3A(D)
1
2 3 − 12 + 241 + 81
√
=−
3A(D)
2·0
= −√
3A(D)
= 0.
130
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Concluı́mos assim que o centróide do triângulo equilátero está onde deveria: no centro
geométrico do mesmo.
6. Calcule a integral dupla da função f(x, y) = (x + y)2 sen2 (x − y) sobre o domı́nio de todos
os pontos (x, y) do plano tais que |x| + |y| ≤ π.
Resolução:
Da inequação modular temos x + y ≤ π, −x − y ≤ π (isto é, −π ≤ x + y), x − y ≤ π
e −x + y ≤ π (isto é, −π ≤ x − y). Daı́, via a mudança linear de variáveis u = x + y e
v = x − y, temos −π ≤ u ≤ π e −π ≤ v ≤ π. (Veja ilustração abaixo.)
Y
−x + y = π
u = x + y,
v=x−y
V
v=π
x+y=π
u = −π
Dxy
u=π
Duv
X
−x − y = π
U
x−y=π
v = −π
Daı́, como
∂(x,y)
∂(u,v)
ZZ
=
1
∂(u,v)
∂(x,y)
1
1·(−1)−1·1
=
= − 21 , segue que
1
(x + y) sen (x − y) dxdy =
2
Dxy
2
2
u2 sen2 v dudv
Duv
Z π Z π
1
2
=
u du sen2 v dv
2 −π −π
Z
1 π 3 u=π
=
[u ]u=−π sen2 v dv
6 −π
v=π
π3
sen 2v
=
v−
6
2
v=−π
=
onde usamos que sen2 v =
1−cos 2v
2
ZZ
π4
,
3
na penúltima igualdade.
RR
2
2
7. Para Dxy = (x, y) ∈ R2 x2 + y2 ≤ 1 , calcule Dxy ex +y dxdy.
Resolução:
Segue uma representação gráfica de Dxy , o cı́rculo de raio unitário e centro na origem.
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
131
Y
1
Dxy
−1
X
1
−1
Temos que Drθ = (r, θ) ∈ R2 0 ≤ r ≤ 1, 0 ≤ θ ≤ 2π e
ZZ
ZZ
2
x2 +y2
e
dxdy =
er rdrdθ
Dxy
Drθ
=
Z θ=2π Z r=1
θ=0
Z r=1
=π
r2
e rdr
r=0
dθ
2
er 2rdr
r=0
=π
Z u=1
eu du
u=0
u=1
= π eu u=0
= π(e − 1),
onde usamos u = r2 , du = 2rdr na quarta igualdade (de cima para baixo).
8. Seja Dxy a região triangular do primeiro quadrante limitada pelas retas y = x, y = 0 e
x = 1 (veja figura 4.7). Usando a fórmula base×altura
(da área de um triângulo) da Geome2
Y
θ= π
4
r
1
r = cos
θ
θ
X
θ=0
r=0
Figura 4.7: Dxy é a região triangular limitada pelas retas y = x, y = 0 e x = 1
RR
tria Plana ou calculando a integral Dxy dxdy apenas em coordenadas cartesianas, sem
mudança de variáveis, obtemos facilmente que a área de Dxy é dada por 12 u.a.. Verifique
tal resultado fazendo a mudança de variáveis para coordenadas polares na integral dupla
anterior.
132
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Resolução:
Como x = 1 e x = r cos θ, temos r = cos1 θ . Daı́
ZZ
ZZ
dxdy =
rdrdθ
Dxy
Drθ
=
Z θ= π
4
θ=0
=
Z r=
1
cos θ
rdr
r=0
Z θ= π 4
θ=0
Z θ= π
4
r2
2
r= cos1 θ
!
dθ
dθ
r=0
1
sec2 θ dθ
2 θ=0
θ= π
1
tan θ θ=04
=
2
1
= .
2
=
9. Verifique, via integrais duplas, que o volume de uma esfera de raio r0 é dado por 43 πr30 .
Resolução:
Note que a calota superior da esfera x2 + y2 + z2 = r20 é o gráfico da função z = f(x, y) =
p
r20 − (x2 + y2 ), cujo domı́nio é o cı́rculo de raio r0 e centro na origem do plano OXY,
que, em coordenadas polares, é dado por 0 ≤ θ ≤ 2π e 0 ≤ r ≤ r0 . Daı́, o volume é dado
por
ZZ q
ZZ q
2
2
2
r0 − (x + y ) dxdy = 2
r20 − r2 rdrdθ
2
Dxy
Drθ
Z θ=2π Z r=r0 q
r20 − r2 rdr dθ
=2
θ=0
r=0
Z r=r0 q
= 2π
r20 − r2 2rdr
r=0
!
Z
r=0
u1/2 du
= 2π −
r=r20
= 2π
=
4πr30
3
2
· (r20 )3/2
3
u.v..
(Na quarta igualdade anterior, de cima para baixo, usamos a mudança de variáveis u =
r20 − r2 , du = −2rdr.)
10. Obtenha o volume da região limitada pela esfera x2 + y2 + z2 = 9, acima do plano z = 0
e interior ao cilindro x2 + y2 = 5. (Veja figura 4.8 para uma representação de tal região.)
Resolução:
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
133
Z
3
−3
−
−3
√
5
√
5
√
− 5
√
3
Y
5
3
X
√
Figura 4.8: Dxy = (x, y) x2 + y2 ≤ 5 e Drθ = (r, θ) 0 ≤ r ≤ 5, 0 ≤ θ ≤ 2π .
√
Sendo Dxy = (x, y) x2 + y2 ≤ 5 e Drθ = (r, θ) 0 ≤ r ≤ 5, 0 ≤ θ ≤ 2π , o volume
é dado por
ZZ p
ZZ p
2
2
9 − x − y dxdy =
9 − r2 rdrdθ
Drθ
Dxy
!
Z θ=2π Z r=√5 p
=
9 − r2 rdr dθ
r=0
θ=0
=π
Z r=√5 p
r=0
Z t=4
= −π
9 − r2 2rdr
t1/2 dt
t=9
38π
=
3
u.v..
(Na quarta igualdade anterior, de cima para baixo, usamos a mudança de variáveis t =
9 − r2 , dt = −2rdr.)
11. Se (r, θ) representa um ponto em coordenadas polares, determine a área da região interior
a r = 3 + 2 sen θ e exterior a r = 2.
Resolução:
Primeiramente, considere a figura 4.9. Nesta, é representada a região Dxy (em coordenadas cartesianas) limitada pelas curvas r = 2 e r = 3 + 2 sen θ (em coordenadas polares),
acima da primeira e abaixo da segunda. Vejamos como tal representação pode ser obtida. Bom, por um lado, a interseção entre as curvas ocorre para 3 + 2 sen θ = 2, isto é,
sen θ = − 12 . Daı́, a interseção ocorre nas semiretas θ = − π6 e θ = 7π
. Por outro lado, se θ
6
cresce de − π6 a 0, então sen θ cresce de − 21 a 0, que implica que r cresce de 3 + 2 − 12 = 2
134
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
5
4
3
2
1
0
-5
-4
-3
-2
-1
0
1
2
3
4
5
-1
-2
-3
-4
-5
Figura 4.9: Dxy é a região interior a cardióide r = 3 + 2 sen θ e exterior a circunferência r = 2.
a 3 + 2 · 0 = 3. Agora, se θ cresce de 0 a π6 , então sen θ cresce de 0 a 12 , que implica que
√
r cresce de 3 a 3 + 2 · 12 = 4. Ainda, se√ θ cresce de π6 a π4 , então sen θ cresce de 12 a 22 ,
√
que implica que√r cresce de 4 a 3 + 2 · 22 = 3 + 2. Por fim, se θ cresce de π4 a π2 , então
√
sen θ cresce de 22 a 1, que implica que r cresce de 3 + 2 a 3 + 2 · 1 = 5. Obtemos daı́
a curva da figura 4.9 nos Quarto e Primeiro Quadrantes. Por simetria, obtemos a curva
nos Segundo e Terceiro Quadrantes. Assim, a área é dada (em u.a.) por
ZZ
1 dxdy =
Dxy
=
ZZ
1 rdrdθ
Drθ
Z θ=7π/6 Z r=3+2 sen θ
θ=−π/6
Z θ=7π/6 rdr
r=2
2 r=3+2 sen θ
dθ
r
dθ
θ=−π/6 2 r=2
Z θ=7π/6 5
2
=
+ 6 sen θ + 2 sen θ dθ
2
θ=−π/6
θ=7π/6
sen 2θ
7θ
=
− 6 cos θ −
2
2
θ=−π/6
√
14π 11 3
+
.
=
3
2
=
12. Se (r, θ) representa um ponto em coordenadas polares, calcule a área da região limitada
pela curva r = a sen(3θ), a > 0.
Resolução:
A figura 4.10 ilustra a região Dxy (em coordenadas cartesianas) interior a curva r =
a sen(3θ) (em coordenadas polares) para a = 1. Vejamos como tal curva pode ser obtida,
pétala por pétala, e como podemos calcular a área requerida.
Primeira Pétala
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
135
Note que, quando 3θ cresce de 0 a π/2, isto é, θ cresce de 0 a π/6, temos que r cresce de
0 a a; quando 3θ cresce de π/2 a π, isto é, θ cresce de π/6 a π/3, temos que r decresce
de a a 0. Assim, no gráfico da figura 4.10, o contorno da primeira pétala começa em
1
0.8
0.6
0.4
0.2
0
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-0.2
-0.4
-0.6
-0.8
-1
Figura 4.10: Rosácea de Três Folhas com a = 1.
(θ = 0, r = 0), tem a sua metade em (θ = π/6, r = a), e termina em (θ = π/3, r = 0).
Agora, quando 3θ cresce de π a 2π, isto é, θ cresce de π/3 a 2π/3, temos que r ≤ 0, isto
é, r = 0. Assim, no gráfico da figura 4.10, para θ ∈ [π/3, 2π/3] temos o contorno em
(θ, r = 0).
Segunda Pétala
Repetindo o raciocı́nio anterior, quando 3θ cresce de 2π a 2π + π/2 = 5π/2, isto é, θ
cresce de 2π/3 a 5π/6, temos que r cresce de 0 a a; quando 3θ cresce de 5π/2 a 3π, isto
é, θ cresce de 5π/6 a π, temos que r decresce de a a 0. Assim, no gráfico da figura 4.10,
o contorno da segunda pétala começa em (θ = 2π/3, r = 0), tem a sua metade em
(θ = 5π/6, r = a), e termina em (θ = π, r = 0). Agora, quando 3θ cresce de 3π a 4π, isto
é, θ cresce de π a 4π/3, temos que r ≤ 0, isto é, r = 0. Assim, no gráfico da figura 4.10,
para θ ∈ [π, 4π/3] temos o contorno em (θ, r = 0).
Terceira Pétala
Para concluir o gráfico, note que quando 3θ cresce de 4π a 4π + π/2 = 9π/2, isto é, θ
cresce de 4π/3 a 3π/2, temos que r cresce de 0 a a; quando 3θ cresce de 9π/2 a 5π,
isto é, θ cresce de 3π/2 a 5π/3, temos que r decresce de a a 0. Assim, no gráfico da
figura 4.10, o contorno da terceira pétala começa em (θ = 4π/3, r = 0), tem a sua metade
em (θ = 3π/2, r = a), e termina em (θ = 5π/3, r = 0). Agora, quando 3θ cresce de 5π a
6π, isto é, θ cresce de 5π/3 a 2π, temos que r ≤ 0, isto é, r = 0. Então, no gráfico dado,
para θ ∈ [5π/3, 2π] temos o contorno em (θ, r = 0).
Cálculo da Área
136
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Sendo Dxy a metade da pétala do primeiro quadrante, a área total das três petálas é dada
por
6
ZZ
1 dxdy = 6
Dxy
=6
ZZ
1 rdrdθ
Drθ
Z θ=π/6 Z r=a sen(3θ)
= 3a
rdrdθ
θ=0
r=0
Z θ=π/6
2
sen2 (3θ) dθ
θ=0
du = 3dθ} Z u=π/2
|u = 3θ, {z
=
a2
sen2 u du
u=0
Z
a2 u=π/2
=
(1 − cos 2u) du
2 u=0
u=π/2
sen 2u
a2
u−
=
2
2
u=0
2
aπ
=
u.a..
4
13. Via integrais duplas ou triplas, obtenha o volume do sólido limitado pelos planos 4x +
2y + z = 10, y = 3x, z = 0 e x = 0.
Resolução via Integrais Duplas:
Na figura seguinte, temos uma representação geométrica da região piramidal delimitada
por tais planos, bem como de sua “planta‘baixa” triangular, isto é, Dxy .
10
Z
y = 3x
4x + 2y + z = 10
3
1
Y
5
y = −2x + 5
X
3
y = 3x
X
1
Note que Dxy = {(x, y) | 0 ≤ x ≤ 1, 3x ≤ y ≤ −2x + 5}. O volume é então calculado, em
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
137
u.v., por
ZZ
(10 − 4x − 2y) dxdy =
Dxy
Z x=1 Z y=−2x+5
x=0
=
=
y=3x
Z x=1
x=0
Z x=1
x=0
(10 − 4x − 2y) dy dx
10y − 4xy − y2
y=−2x+5
y=3x
dx
25 − 50x + 25x2 dx
x=1
x3
= 25 x − x +
3 x=0
1
= 25 ·
3
25
=
3 1
5
= ×
× 10 ,
3
2
2
coincidindo portanto com a fórmula do volume de uma pirâmide, isto é,
Um Terço do Produto da Área da Base pela Altura da Pirâmide .
Resolução via Integrais Triplas: Na figura anterior, denote a região piramidal
por Dxyz . O volume é então calculado, em u.v., por
ZZZ
1 dzdxdy =
Dxyz
=
ZZ
ZZ
Dxy
Z z=10−4x−2y
z=0
1 dz dxdy
(10 − 4x − 2y) dxdy
Dxy
= ···
25
=
3
u.v.,
onde as reticências anteriores representam o cálculo que acabamos de realizar na Resolução
via Integrais Duplas.
14. Sendo Dxyz limitada por y = 2x2 + 2z2 e pelo plano y = 8, calcule
ZZZ
Dxyz
p
3x2 + 3z2 dxdydz.
Resolução:
Como w1 (x, z) = 2x2 + 2z2 e w2 (x, z) = 8 (veja figura 4.11), podemos considerar a
interseção dada por 2x2 + 2z2 = 8 para obter Dxz como sendo o cı́rculo no plano OXZ
138
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
12
10
8
6
y
4
2
0
6
4
2
6
4
0
z
2
0
-2
-2
-4
-6 -6
x
-4
Figura 4.11: Dxyz : 2x2 + 2z2 ≤ y ≤ 8, (x, z) ∈ Dxz ; Dxz : x2 + z2 ≤ 4.
com centro na origem e raio 2. Temos assim que
ZZZ
Dxyz
p
3x2 + 3z2 dxdydz =
ZZ
ZZ
Dxz
Z y=8
y=2x2 +2z2
p
3x2 + 3z2 dy dxdz
hp
iy=8
2
2
3x + 3z y
=
dxdz
y=2x2 +2z2
Dxz
√ ZZ p
x2 + z2 8 − 2 x2 + z2 dxdz
= 3
Dxz
√ ZZ
r 8 − 2r2 rdrdθ
= 3
Drθ
√ Z θ=2π Z r=2
2
4
8r − 2r dr dθ
= 3
θ=0
r=0
r=2
θ=2π
8r
2r5
= 3·
−
· θ θ=0
3
5 r=0
√
64 64
−
· 2π
= 3·
3
5
√ 2 · (5 · 64 − 3 · 64)
= 3·
·π
15
√ 4 · 64
·π
= 3·
√ 15
256 3π
.
=
15
√
3
(Na quarta igualdade, de cima para baixo, usamos a mudança de variáveis x = r cos θ e
z = r sen θ com 0 ≤ r ≤ 2 e 0 ≤ θ ≤ 2π.)
15. Via integrais triplas, determinar o volume de uma cunha cortada do cilindro x2 + y2 = 1
pelos planos z = −y e z = 0. (Veja figura 4.12 para uma representação de tal cunha.)
Resolução:
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
139
0
-0.2
-0.4
y
-0.6
-0.8
-1 1
0.8
1
0.6
0.5
0.4
z
0
0.2
-0.5
x
0 -1
Figura 4.12: Cunha cortada do cilindro x2 + y2 = 1 pelos planos z = −y e z = 0. Observe que
Dxy é a metade inferior do cı́rculo unitário no plano OXY com centro na origem.
O volume é dado pela integral
ZZZ
1 dxdydz =
Dxyz
=
ZZ
Dxy
Z z=−y
z=0
Z x=1 Z y=0
x=−1
Z x=1
1 dz dxdy
√
y=− 1−x2
(−y)dy dx
2 y=0
1
−y y=−√1−x2 dx
2 x=−1
Z
1 x=1
=
1 − x2 dx
2 x=−1
x=1
x3
1
x−
=
2
3 x=−1
1
1
= ·2 1−
2
3
2
u.v..
=
3
=
16. Via integrais triplas, verificar que o volume de um cone circular reto de raio R e altura h
2
é πR3 h .
Resolução:
p
Considere o cone z = m x2 + y2 (onde m é a inclinação da geratriz em relação a um
plano que a contenha) e z ≥ 0 (veja figura 4.13). Daı́ m = hR e tal cone pode ser represenp
tado pelo conjunto Dxyz dos pontos (x, y, z) tais que hR x2 + y2 ≤ z ≤ h e x2 + y2 ≤ R2 .
Assim, em coordenadas cilı́ndricas, tal cone pode ser representado pelo conjunto dos pontos (r, θ, z) tais que hr
≤ z ≤ h, 0 ≤ r ≤ R e 0 ≤ θ ≤ 2π. Logo o volume procurado é
R
140
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Z
R
1
0
h
m= h
R
Y
X
Figura 4.13: Dxyz :
origem e raio R.
h
R
p
x2 + y2 ≤ z ≤ h, (x, y) ∈ Dxy , sendo Dxy o cı́rculo com centro na
dado por
ZZZ
1 dxdydz =
Dxyz
=
ZZZ
ZZ
Drθz
1 rdrdθdz
!
Z
z=h
1 dz rdrdθ
Drθ
z= hr
R
Z θ=2π Z r=R hr
rdr dθ
=
h−
R
θ=0
r=0
Z θ=2π
Z r=R r2
=h
dθ
r−
dr
R
θ=0
r=0
r=R
2
r
r3
= 2πh
−
2
3R r=0
1 1
2
= 2πhR
−
2 3
πhR2
u.v..
=
3
17. Via integrais triplas, calcular o volume do parabolóide z = a x2 + y2 de altura h.
Resolução:
Note que Dxyz é o conjunto dos pontos (x, y, z) tais que a x2 + y2 ≤ z ≤ h e (x, y)
q
pertence ao cı́rculo Dxy com centro na origem e raio ha . (Veja figura 4.14.) Dxyz pode
ser então representado, em coordenadas cilı́ndricas,
q pelo conjunto Drθz dos pontos (r, θ, z)
tais que ar2 ≤ z ≤ h e (r, θ) ∈ Drθ com 0 ≤ r ≤
h
a
e 0 ≤ θ ≤ 2π. Daı́ o volume é dado
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
141
Z
q
h
a
h
z = a(x2 + y2 )
X
Y
Figura 4.14: Os pontos (x, y, z) de Dxyz são tais que a x2 + y2 ≤ z ≤ h e (x, y) ∈ Dxy com
q 2
2
2
x + y ≤ ha .
pela integral
ZZZ
1 dxdydz =
Dxyz
=
=
ZZZ
ZZ
1 rdrdθdz
Drθz
Drθ
Z z=h
z=ar2
1 dz rdrdθ
Z θ=2π Z r=√h/a
θ=0
r=0
Z r=√h/a
[z]z=h
z=ar2
!
rdr dθ
h − ar2 rdr
r=0
2
√
4 r= h/a
hr
ar
= 2π
−
2
4 r=0
2
2
h
h
=π
−
a
2a
2
πh
u.v..
=
2a
= 2π
18. Via integrais triplas, obtenha o volume da calota esférica que representa a interseção da
esfera x2 + y2 + z2 ≤ R2 com o semi-espaço z ≥ a, 0 < a < R.
Resolução:
Usando a figura 4.15 (cuja legenda explicita a passagem de coordenadas cartesianas para
142
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Z
R
z=a
z=
−R
q
R2 − (x2 + y2 )
−R
Y
R
R
X
p
Figura 4.15: Dxyz é o conjunto dos pontos (x, y, z) tais que a ≤ z ≤ R2 − (x2 + y2 )√e (x, y) ∈
2
Dxy com x2 + y2 ≤ R2 − a√
; Drθz é o conjunto dos pontos (r, θ, z) tais que a ≤ z ≤ R2 − r2 e
(r, θ) ∈ Drθ com 0 ≤ r ≤ R2 − a2 e 0 ≤ θ ≤ 2π.
cilı́ndricas), o volume é dado por
ZZZ
1 dxdydz =
Dxyz
=
ZZZ
1 rdrdθdz
Drθz
Z θ=2π
θ=0
= 2π
= −π
Z r=√R2 −a2
r=0
Z r=√R2 −a2 p
r=0
Z u=a2
u=R2
√
Z z=√R2 −r2
!
1 dz rdr dθ
z=a
R2
−
r2
!
− a rdr
u − a du
u=a2
2u3/2
− au
= −π
3
u=R2
2 3
3
2
2
=π
(R − a ) − a R − a
3
2
R + aR + a2 aR + a2
−
= 2π(R − a)
3
2
2
2
2R − aR − a
u.v..
= 2π(R − a) ·
6
(Na quarta igualdade acima, de cima para baixo, usamos a mudança de variáveis u =
R2 − r2 , du = −2rdr.)
Assim, como R − a > 0, o volume calculado depende de p(R) = 2R2 − aR − a2 ser
positivo. Mas p(R) representa
uma parábola com concavidade para cima. Logo p(R) = 0
√
a± 9a2
se, e somente se, R =
, isto é, R = a ou R = − a2 . Segue agora uma interpretação
4
geométrica do Estudo de Sinal de tal parábola.
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
143
p(R)
+
+
a R
− a2
−
A figura anterior nos diz que
p(R) > 0
R<−
⇐⇒
a
2
ou R > a.
Observando que apenas a condição R − a > 0 deve ser considerada, segue que p(R) é
positivo e daı́ o volume pode, de fato, ser obtido.
19. Via integrais triplas, calcule o volume do sólido limitado inferiormente pelo plano OXY,
lateralmente pela esfera ρ = 2 e superiormente pelo cone φ = π3 .
Resolução:
Como ρ ∈ [0, 2], φ ∈ π3 , π2 e θ ∈ [0, 2π] (veja figura 4.16), o volume é dado por
Z
ρ=2
φ= π
3
1
0
0
1
X
Y
Figura 4.16: Esfera ρ = 2 “furada” pelo cone φ = π3 .
ZZZ
1 dxdydz =
Dxyz
=
ZZZ
ρ2 sen φ dρdφdθ
Dρφθ
Z θ=2π Z φ=π/2 Z ρ=2
θ=0
=
8π
3
como pode ser facilmente verificado.
φ=π/3
u.v.,
ρ=0
ρ2 dρ
!
sen φ dφ
dθ
144
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
20. Via integrais triplas, obter o volume do sólido limitado inferiormente pelo cone φ ≤
superiormente pela esfera ρ ≤ 2R cos φ.
π
4
e
Resolução:
Para visualizar a esfera da figura 4.17, note que
Z
2R
R
R
Y
X
2
2
2
2
Figura 4.17: União da calota superior da esfera ρ ≤ 2R cos φ, isto
√ é, x + y + (z − πR) ≤ R ,
com o cone circular reto com vértice na origem, altura R e raio 2R, dado por φ ≤ 4 .
ρ2 ≤ 2Rρ cos φ ⇔ x2 + y2 + z2 − 2Rz + R2 ≤ R2 ⇔ x2 + y2 + (z − R)2 ≤ R2 .
O volume é daı́ dado por
ZZZ
ZZZ
dxdydz =
Dxyz
=
ρ2 sen φ dρdφdθ
Dρφθ
Z φ=π/4 Z ρ=2R cos φ
Z θ=2π
=
16πR
3
3
Z φ=π/4
!
ρ2 dρ sen φ dφ dθ
ρ=0
φ=0
θ=0
cos3 φ sen φ dφ.
φ=0
Via a mudança de variáveis u = cos φ, temos que du = −sen φ dφ e o volume é então
dado por
16πR3
−
3
Z u=√2/2
u=1
1
4πR3
1−
u du =
3
4
3
= πR u.v..
3
21. Via integrais triplas em coordenadas esféricas, obter o volume do sólido limitado superiormente pela esfera x2 + y2 + z2 ≤ R2 e inferiormente pelo cone z2 = m2 (x2 + y2 ), sendo
z ≥ 0. (Veja figura 4.18 para uma representação geométrica de tal sólido.)
4.5. EXERCÍCIOS - CÁLCULO INTEGRAL
145
Z
x2 + y2 + z2 ≤ R2 ⇔ ρ ≤ R
φm
z2 = m2 (x2 + y2 ), z ≥ 0
Y
X
Figura 4.18: União da calota superior da esfera x2 + y2 + z2 ≤ R2 , isto é, ρ ≤ R, com o cone
circular reto com vértice na origem dado por z2 = m2 (x2 + y2 ), z ≥ 0.
Resolução:
Para escrever a equação do cone em coordenadas esféricas note que, por um lado,
1 + m2 z2 = z2 + m2 z2
= m2 x2 + y2 + m2 z2
= m2 x2 + y2 + z2
= m 2 ρ2 .
Segue daı́ que
z2 =
m 2 ρ2
.
1 + m2
Por outro lado, sabemos que
z2 = ρ2 cos2 φ.
Daı́, denotando φ (para tal inclinação m) por φm , é fácil ver que cos2 φm =
m
, isto é,
cos φm = √1+m
2
0 ≤ φ ≤ φm = cos−1 √
m
.
1 + m2
m2
.
1+m2
Logo
146
CAPÍTULO 4. RESULTADOS - CÁLCULO INTEGRAL
Então o volume procurado é dado por
ZZZ
ZZZ
dxdydz =
Dxyz
ρ2 sen φ dρdφdθ
Dρφθ
=
Z θ=2π Z φ=φm Z ρ=R
θ=0
=
2πR
3
φ=0
3 Z φ=φm
2
ρ dρ
ρ=0
sen φ dφ dθ
sen φ dφ
φ=0
φ=φm
2πR3 − cos φ φ=0
3 m
2πR3
1− √
=
3
1 + m2
=
A resposta depende de 1 −
√ m
1+m2
ser positivo. De fato
u.v..
√ m
1+m2
<
√m
m2
= 1.
Capı́tulo 5
Resultados - Cálculo Vetorial
“There is nothing in the world
except empty curved space.
Matter, charge,
electromagnetism, and other
fields are only manifestations of
the curvature of space.”
John Wheeler
Os Teoremas de Green, Gauss e Stokes do Cálculo Vetorial têm forte relação com as Equações
de Maxwell (do Eletromagnetismo),1 que, assim como as importantes Equações de NavierStokes, nos fornecem informações fundamentais sobre o comportamento de fluı́dos e fluxos (tais
como, velocidade, aceleração, estabilidade, contenção, transferência, propagação, transmissão,
escoamento, vazão, etc) em meios sólidos, lı́quidos ou gasosos, com ou sem viscosidade, heterogêneos ou homogêneos, porosos ou não porosos, saturados ou não saturados, fraturados ou
não fraturados, etc.
Aqui, apenas o Teorema de Stokes no plano, conhecido como o Teorema de Green, é estudado
em detalhes, ficando o aprofundamento do caso tridimensional, bem como o estudo do Teorema
de Gauss, para uma próxima versão destas NA.
5.1
Integrais de Linha
Denotamos o traço da curva parametrizada γ : [a, b] → R2 por Γ , isto é,
Γ := {γ(t) | t ∈ [a, b]} ,
e dizemos que Γ é uma curva. Considere daı́ uma função F : Γ → R2 limitada, isto é,
Dom(F) = Γ e Im(F) = F(Γ ) é um conjunto limitado em R2 . (Uma tal F é chamada de um
campo vetorial.) Por último, seja γ diferenciável.
1
Indico o excelente livro A Student’s Guide to Maxwell’s Equations, editado pela Cambridge
University Press (em 2008) e escrito pelo fı́sico Daniel Fleisch, para aqueles interessados em tais equações.
147
148
CAPÍTULO 5. RESULTADOS - CÁLCULO VETORIAL
b
Γ
F(Γ )
γ
F
a
Γ ter orientação positiva (respectivamente, negativa) significa γ(t) percorrê-la no sentido
anti-horário (respectivamente, horário) a medida que t crescer em [a, b].2
5.1.1
Definição das Integrais de Linha
A Integral de Linha de F ao longo de Γ é definida por
Z
Γ
F · dγ :=
Zb
a
F(γ(t)) · γ ′ (t) dt
se, obviamente, existir a integral do lado direito de tal igualdade.
Exemplo
Seja F(x, y) = (−y + 1, x) e considere a semi-circunferência Γ de centro na origem e raio 2
parametrizada por γ(t) = (2 cos t, 2 sen t) para t ∈ [0, π].
t = π/2
Γ
t=π
−2
t=0
0
2
Como F(γ(t)) = (−2 sen t + 1, 2 cos t) e γ ′ (t) = (−2 sen t, 2 cos t) para cada t ∈ [0, π], temos
Z
Γ
F · dγ =
=
Zπ
Z0π
Z0π
(−2 sen t + 1, 2 cos t) · (−2 sen t, 2 cos t)dt
4 sen2 t − 2 sen t + 4 cos2 t dt
(4 − 2 sen t)dt
π
= 4t + 2 cos t 0
=
0
= 4π − 4.
Por exemplo, a circunferência Γ = (x, y) x2 + y2 = 1 tem orientação positiva (respectivamente, negativa)
se parametrizada por γ(t) = (cos t, sen t) (respectivamente, γ(t) = (cos t, −sen t)) para cada t ∈ [0, 2π].
2
5.1. INTEGRAIS DE LINHA
149
Integrais de Linha: Para que servem?
As integrais de linha têm várias aplicações fı́sicas relacionadas ao comportamento de um vetor
ao longo de uma curva tais como: o trabalho realizado por uma força F ao longo de uma curva
Γ ; o fluxo do vetor velocidade de um fluı́do através de uma curva; etc. Embora tais aplicações
não sejam estudadas aqui,3 veremos que tais integrais também são úteis para calcular certos
tipos de integrais duplas e áreas de regiões planas limitadas por certas curvas.
Notação sugestiva para Integrais de Linha:
Suponha agora que F(x, y) = (f(x, y), g(x, y)) e γ(t) = (x(t), y(t)) para todos os pontos onde
tais funções estejam definidas. Daı́, devido a
Z
Γ
F · dγ =
Zb
a
[f(x(t), y(t)) · x ′ (t) + g(x(t), y(t)) · y ′ (t)] dt,
tal integral de linha também é denotada por
Z
fdx + gdy.
Γ
Exercı́cios
R
1. Calcule (x + y)dx + xydy para Γ = (x, y) 0 ≤ x ≤ 2, y = x2 com orientação positiva.
Γ
Resolução:
Aqui, f(x, y) = x + y, g(x, y) = xy e Γ é o arco da parábola de (0, 0) a (2, 4), parametrizada
por x(t) = t e y(t) = t2 para t ∈ [0, 2].4
(0, 4)
t=2
t=0
(2, 0)
3
Aqui, temos apenas um único exercı́cio sobre o trabalho τ relizado por uma força F ao longo de uma curva
4
No próximo exercı́cio, faremos um comentário sobre a possibilidade de Γ admitir outras parametrizações.
Γ!
150
CAPÍTULO 5. RESULTADOS - CÁLCULO VETORIAL
Daı́, como x ′ (t) = 1 e y ′ (t) = 2t, segue que
Z
Z2
t + t2 · 1 + (t · t2 ) · 2t dt
(x + y)dx + xydy =
0
Γ
Z2
t + t2 + 2t4 dt
=
0
t2 t3 2t5
+ +
=
2
3
5
8 64
=2+ +
3
5
262
=
15
7
= 17 .
15
2
2
com Γ = (x, y) | x + y = r2 .
2. Calcule
R −ydx+xdy
Γ
x2 +y2
2
0
Resolução:
Parametrize a circunferência de raio r por γ(t) = (r cos t, r sen t) com t ∈ [0, 2π].5 Então
Z
Z 2π −ydx + xdy
r sen t
r cos t
− 2
=
(−r sen t) + 2
(r cos t) dt
x2 + y2
r (cos2 t + sen2 t)
r (cos2 t + sen2 t)
Γ
0
Z 2π 2
r sen2 t r2 cos2 t
dt
=
+
r2
r2
0
Z 2π
sen2 t + cos2 t dt
=
0
Z 2π
=
1 dt
0
= 2π.
Exercı́cio
Se uma força é dada por
F(x, y) = (0, x), (x, y) ∈ R2 ,
calcule o trabalho realizado por tal força,
τ=
Z
Γ
F · dγ,
ao longo da curva Γ representada pelo quarto da circunferência unitária no primeiro quadrante,
orientada no sentido anti-horário. Ainda, como a integral anterior não depende da parametrização de Γ , desde que seja respeitada a orientação da mesma, resolva a questão com as
seguintes parametrizações γ(t) de Γ :
5
Pode ser demonstrado que, dada uma integral de linha arbitrária, o valor de tal integral é independente da
parametrização (que preserve a orientação) da curva, isto é, se γ1 (t) e γ2 (t) são parametrizações (que preservam
a orientação) de Γ , então
Z
Z
Γ
F · dγ1 =
Γ
F · dγ2 .
Resolva este exercı́cio usando outra parametrização de Γ . Por exemplo, γ(t) = (r cos 2πt, r sen 2πt) com t ∈ [0, 1].
5.1. INTEGRAIS DE LINHA
151
1. (cos t, sen t), t ∈ 0, π2 ;
2.
√
1 − t2 , t , t ∈ [0, 1].
Observação
Sejam Γ1 e Γ2 curvas como a da definição de integral de linha. Considere que o ponto final de
Γ1 coincide com o ponto inicial de Γ2 . Denote Γ := Γ1 ∪ Γ2 . Seja ainda F como na definição de
integral de linha. Pode ser demonstrado que
Z
Γ
F · dγ =
Z
Γ1
F · dγ1 +
Z
Γ2
F · dγ2 .
Exemplos
1. Vamos integrar F(x, y) = (y, x2 ) sobre o triângulo Γ = Γ1 ∪ Γ2 ∪ Γ3 , que representa a união
de três segmentos orientados positivamente, representado na ilustração dada a seguir.
5
Y
Γ3
Γ2
2
1
O
Γ1
2
X
Para integrar F sobre Γ , vamos precisar de três parametrizações; uma para cada segmento de
reta. Para parametrizar um segmento, obtenha primeiro a equação da reta
que o contêm. Para
1
1
Γ1 , temos y = 2 x + 1, que pode ser parametrizada por γ1 (t) = t, 2 t + 1 para cada t ∈ [0, 2].
Então
Z
Z2 1
t
2
+ 1, t · 1,
dt
F · dγ1 =
2
2
Γ1
0
Z2 2
t
t
=
+ + 1 dt
2
2
0
2
3
t2
t
+ +t
=
6
4
0
13
= .
3
152
CAPÍTULO 5. RESULTADOS - CÁLCULO VETORIAL
Agora, como Γ2 está contido na reta x = 2, podemos parametrizá-lo por γ2 (t) = (2, t) para
cada t ∈ [2, 5]. Daı́
Z
Z5
F · dγ2 = (t, 4) · (0, 1) dt
Γ2
2
=
Z5
4 dt
5
=4 t 2
2
= 12.
Por último, para Γ3 , considere a reta y = 2x + 1. Se parametrizada por γ3 (t) = (t, 2t + 1) para
todo t ∈ [0, 2], Γ3 têm sentido horário. Então, para τ = 2 − t, temos 2t + 1 = 5 − 2τ. (Note
que, quando τ cresce de 0 a 2, t decresce de 2 a 0 e, daı́, Γ3 tem sentido anti-horário.) Assim,
parametrize Γ3 por γ3 (τ) = (2 − τ, 5 − 2τ) para cada τ ∈ [0, 2]. (Tal procedimento é dito uma
reparametrização da curva.) Daı́
Z
Z2
F · dγ3 = (5 − 2τ, (2 − τ)2 ) · (−1, −2) dτ
0
Γ3
=−
Z2
0
2τ2 − 10τ + 13 dτ
2τ3
=−
− 5τ2 + 13τ
3
34
=− .
3
2
0
Para concluir, temos que
Z
Z
Z
Z
F · dγ =
F · dγ1 +
F · dγ2 +
F · dγ3 = 5.
Γ
Γ1
Γ2
Γ3
2. Seja Γ = Γ1 ∪ Γ2 ∪ Γ3 tal que Γ1 é a parte (orientada) da parábola y = x2 que vai de (0, 0) a
(1, 1), Γ2 é o segmento (orientado) de reta que vai de (1, 1) a (0, 1) e Γ3 é o segmento (orientado)
de reta que vai de (0, 1) a (0, 0).
Y
1
Γ2
Γ3
Γ1
X
Considere então as seguintes parametrizações:
Γ1 : γ1 (t) = (t, t2 ) com t ∈ [0, 1];
Γ2 : γ2 (t) = (1 − t, 1) com t ∈ [0, 1];
5.1. INTEGRAIS DE LINHA
153
Γ3 : γ2 (t) = (0, 1 − t) com t ∈ [0, 1].
Segue daı́ que
Z
3 2
Γ
x y + y dx + xdy =
=
Z
x3 y2 + y dx + xdy
Γ1
Z
+
x3 y2 + y dx + xdy
Z Γ2
+
x3 y2 + y dx + xdy
Z1
Γ3
t7 + t2 + 2t2 dt
0
Z1
− (1 − t)3 + 1 + 0 dt
+
0
Z1
+ (0 + 0)dt
0
1 Z 0
t
3
u3 + 1 du + 0
+t +
=
8
1
0
1
1
= +1− −1
8
4
1
=− .
8
(Este exemplo também será resolvido via o Teorema de Green.)
5.1.2
8
Teorema Fundamental do Cálculo para Integrais de Linha
Considere f : Γ → R diferenciável com fx e fy contı́nuas. Sejam A, B ∈ R2 os pontos extremos
de uma curva Γ = {γ(t) | t ∈ [a, b]}, isto é, A = γ(a) e B = γ(b), com γ ′ (t) contı́nua. Então
Z
∇f · dγ = f(B) − f(A).
Γ
Demonstração:
Z
Γ
∇f · dγ =
Zb
a
Zb
∇f(γ(t)) · γ ′ (t) dt
d
f(γ(t)) dt
a dt
= f(γ(b)) − f(γ(a))
= f(B) − f(A).
=
(Nas segunda e terceira igualdades, usamos, respectivamente, a Regra da Cadeia estudada
nestas NA e o Teorema Fundamental do Cálculo para funções do “Cálculo I”.)
Exercı́cio
R
Calcule ∇f · dγ se f(x, y) = cos(xyπ) e Γ for qualquer curva cuja parametrização tenha
Γ
derivada contı́nua e tenha pontos inicial e final em 1, 12 e (2, 1), respectivamente.
154
CAPÍTULO 5. RESULTADOS - CÁLCULO VETORIAL
Observação
Segue do teorema anterior que, para uma função F = ∇f adequada,
pontos inicial e final e não da curva que ligue tais pontos.
R
γ
F · dγ só depende dos
Exercı́cio
Se F(x, y) = (y, x), existe f tal que F = ∇f e, em existindo, o que o teorema anterior nos diz
em relação a isto?
5.2
Teorema de Green
Seja Γ uma curva parametrizada no sentido anti-horário por γ : [a, b] → R2 contı́nua. Considere
ainda que Γ é:
Fechada, isto é, γ(a) = γ(b);
Simples, isto é, Γ não intercepta a si própria, isto é, γ (t1 ) 6= γ (t2 ) para t1 , t2 ∈]a, b] com
t1 6= t2 ;
C1 por Partes, isto é, existe uma partição de [a, b] em um número finito de subintervalos
fechados tal que γ tem derivada contı́nua em cada um destes subintervalos.
Por último, considere também que f, g : Γ → R são contı́nuas com gx , fy contı́nuas num D = Dxy
aberto cuja fronteira é a curva Γ . Daı́:
ZZ
I
(gx − fy ) dxdy = (f, g) · dγ
D
IΓ
= fdx + gdy.
Γ
Esta, aqui, é chamada de Equação de Green.
Para concluir, observe que, assim como no Teorema Fundamental do Cálculo, o resultado
anterior nos diz que a integração de determinadas funções depende apenas da fronteira do
conjunto aberto sobre o qual se está integrando.
Exemplo
Vamos resolver o (já resolvido) último exemplo, mas desta vez, usando o Teorema de Green.
Podemos pensar que, naquele exemplo, calculamos o valor − 81 para o segundo membro da
Equação de Green, isto é,
I
1
x3 y2 + y dx + xdy = − .
8
Γ
Vamos agora calcular o primeiro membro da Equação de Green usando apenas integração dupla.
Verificar a validade do Teorema de Green, neste exemplo, significa obter
ZZ
1
(gx − fy ) dxdy = − .
8
D
5.2. TEOREMA DE GREEN
155
Assim, note primeiramente que, como f(x, y) = x3 y2 + y e g(x, y) = x, segue que fy (x, y) =
2x3 y + 1 e gx (x, y) = 1. Então
ZZ
ZZ
(gx − fy ) dxdy = −
2x3 y dxdy
D
D
Z x=1 Z y=1
3
=−
2x y dy dx
y=x2
x=0
=−
=−
Z x=1
x=0
Z x=1
x=0
4
x3 y2
y=x2
dx
x3 − x7 dx
x8
x
−
=−
4
8
1
=− .
8
y=1
x=1
x=0
É conveniente ressaltar que, como visto no último exemplo, Γ satisfaz as hipóteses do Teorema
de Green, isto é, Γ tem sentido anti-horário e é simples, fechada e C1 por partes.
Exercı́cios
1. Use o Teorema de Green para calcular a integral de linha
Z
(1 + xy2 )dx − x2 ydy
Γ
onde Γ é o arco da parábola y = x2 cujos pontos inicial e final são (−1, 1) e (1, 1),
respectivamente.
2. Use o Teorema de Green para calcular
I p
1 + x3 dx + 2xydy
Γ
onde Γ é o triângulo cujos vértices são os pontos (0, 0), (1, 0) e (1, 3), orientado no sentido
anti-horário.
5.2.1
Cálculo de Áreas via Integrais de Linha
Sejam g(x, y) =
x
2
e f(x, y) = − y2 . Daı́, pelo Teorema de Green,
ZZ
a(D) =
dxdy
D
ZZ
=
(gx − fy ) dxdy
D
I
= fdx + gdy
Γ
I
1
−ydx + xdy u.a..
=
2 Γ
156
CAPÍTULO 5. RESULTADOS - CÁLCULO VETORIAL
Exemplos
H
1. Vamos mostrar que o valor de Γ xy2 dx + (x2 y + 2x)dy ao longo de qualquer quadrado Γ
depende apenas do tamanho de Γ e não da localização de tal quadrado no plano. De fato, pelo
Teorema de Green,
I
ZZ
2
2
xy dx + (x y + 2x)dy =
(2xy + 2 − 2xy)dxdy
Γ
D
ZZ
=
2 dxdy
D
= 2 a(D).
x2 y2
2. Vamos calcular a área da elipse Γ = (x, y) a2 + b2 = 1 pelo Teorema de Green. Assim,
parametrize a elipse por γ(t) = (a cos t, b sen t) com t ∈ [0, 2π]. Daı́
I
1
−ydx + xdy
a(D) =
2 Γ
Z
1 2π
=
−(b sen t)(−a sen t) + (a cos t)(b cos t) dt
2 0
Z
1 2π
=
ab sen2 t + cos2 t dt
2 0
Z
1 2π
ab dt
=
2 0
= abπ u.a..
Exercı́cio
Use o Teorema de Green para calcular a área da elipse cuja fronteira Γ é dada pela equação
(y−2)2
(x−1)2
+
= 1.
4
9
5.2.2
De Green para Stokes
No Teorema de Green, tanto o campo vetorial F = (f, g) quanto a região D são planares. Assim,
por um lado, considere agora que F = (f, g, 0) e S = {(x, y, z) | (x, y) ∈ D, z = 0}. Neste caso, o
rotacional de F é dado por
~i
~j
~k ∇ × F = ∂/∂x ∂/∂y ∂/∂z f
g
0 ∂g ∂f ~
−
k.
=
∂x ∂y
∇ × F é um vetor que só tem a componente na direção ~k. Contudo, para transformá-lo num
valor escalar, basta multiplicá-lo escalarmente por ~k. Logo, como ~k · ~k = 1, segue que
(∇ × F) · ~k = gx − fy .
5.2. TEOREMA DE GREEN
157
Por outro lado, denote a curva Γ (que representa a fronteira de S = D × {0}) por ∂S, dγ por
ds e (a área infinitesimal) dxdy por dS. Então, a Equação de Green pode ser escrita da forma
I
∂S
F · ds =
ZZ
S
(∇ × F) · ~k dS.
Em outras palavras, a integral do campo vetorial F ao longo da fronteira ∂S é igual ao rotacional
de F sobre a superfı́cie planar S. Este é, de fato, o Teorema de Stokes no plano. Vamos assim
fazer as seguintes quatro modificações para converter o Teorema de Green numa versão mais
geral do Teorema de Stokes:
1. Considere o campo vetorial F = (f, g, h) e seja S uma superfı́cie de R3 que tenha normal
em cada um de seus pontos.6
2. Considere que a fronteira ∂S seja uma curva contida em algum plano em R3 .7
3. Considere o rotacional
~i
~j
~k ∇ × F = ∂/∂x ∂/∂y ∂/∂z f
g
h = (hy − gz )~i + (fz − hx )~j + (gx − fx ) ~k.
~ que seja normal a S.8
4. Troque ~k por um vetor n
Temos então a Equação de Stokes,
I
ZZ
~ dS,
F · ds =
(∇ × F) · n
∂S
S
como parte do Teorema de Stokes. Em tal equação, dS pode estar representando dxdy ou
dxdz ou dydz.
Exemplo
Seja F(x, y, z) = (3y, 4z, −6x) definida no parabolóide S = (x, y, z) z = 16 − x2 − y2 ≥ 0 .
Note que ∂S é a circunferência de centro (0, 0, 0) e raio 4, percorrida no sentido anti-horário
6
Por exemplo, S pode ser o gráfico de uma função z = z(x, y) diferenciável adequada. Outra possibilidade é
S ser a superfı́cie de nı́vel c representada pela equação w(x, y, z) = c com w diferenciável.
7
Uma parametrização de tal curva tem três componentes: x(t), y(t) e z(t).
8
~ é dado por
Por exemplo, se z e w são como na penúltima nota de rodapé, então, como sabemos, n
± (−zx , −zy , 1)
ou
± (wx , wy , wz ) .
Ainda, a orientação da curva ∂S é obtida via a regra da mão direita, isto é, após fazer o sinal de positivo
com a mão direita, imagine que o vetor ~n normal ao plano que contêm a curva ∂S esteja apontado na direção
do polegar e que tenha sido envolvido pelos os outros dedos da mão direita. Daı́ o sentido de percurso da curva
é o mesmo sentido daqueles outros dedos quando estão se fechando para envolver ~n. Assim, a curva tem sentido
anti-horário em relação ao plano que a contêm.
158
CAPÍTULO 5. RESULTADOS - CÁLCULO VETORIAL
pois ~n = ~k. Logo, por um lado, a integral de linha do lado esquerdo da Equação de Stokes é,
parametrizando ∂S por s(t) = (4 cos t, 4 sen t, 0) com t ∈ [0, 2π], dada por
I
∂S
F · ds =
Z 2π
0
Z 2π
F(s(t)) · s ′ (t) dt
(12 sen t, 0, −24 cos t) · (−4 sen t, 4 cos t, 0) dt
Z 2π
= −48
sen2 t dt
=
0
0
= −48π.
Por outro lado, como
~ = (−zx , −zy , 1) = (2x, 2y, 1),
∇ × F = (−4, 6, −3) e n
o segundo membro da Equação de Stokes é dado por
ZZ
ZZ
~ dS =
(∇ × F) · n
(−4, 6, −3) · (2x, 2y, 1) dxdy
S
Dxy
ZZ
=
(−8x + 12y − 3) dxdy
Dxy
ZZ
=
(−8r cos θ + 12r sen θ − 3)rdrdθ
Drθ
=
Z 2π Z 4
0
0
= −48π.
2
2
−8r cos θ + 12r sen θ − 3r dr dθ
Exercı́cios
1. Seja Γ a curva parametrizada por x(t) = 0, y(t) = 2 + 2 cos t e z(t) = 2 + 2 sen t, t ∈ [0, 2π].
Use o Teorema de Stokes para calcular a seguinte integral de linha:
I
x2 ez dx + x sen y dy + 3y dz.
Γ
2. Sejam F(x, y, z) = (−y, x, z) e S a parte do parabolóide z = 7 − x2 − 4y2 acima do plano
z = RR
3, orientada com normais apontando para cima. Use o Teorema de Stokes para calcular
~ dS.
I = S (∇ × F) · n
5.2.3
Outros Exercı́cios
Resolva, além dos nossos, exercı́cios sobre o Teorema de Green (respectivamente, Stokes), no
nı́vel dos apresentados aqui, de outros livros de Cálculo. Por exemplo, nos livros dados como
referências no Capı́tulo 1 destas NA.
5.3. FORMULÁRIO - CÁLCULO VETORIAL
5.3
159
Formulário - Cálculo Vetorial
As fórmulas que seguem são válidas para funções e curvas sujeitas as hipóteses estabelecidas neste
capı́tulo.
1. Integral de Linha de F = (f, g) ao longo de Γ parametrizada por γ(t) = (x(t), y(t)):
Z
Z
F · dγ = fdx + gdy
Γ
Γ
Zb
= F(γ(t)) · γ ′ (t) dt;
a
2. Teorema Fundamental do Cálculo para Integrais de Linha:
Z
∇f · dγ = f(γ(b)) − f(γ(a));
Γ
3. Equação de Green:
ZZ
(gx − fy ) dxdy =
D
=
I
IΓ
(f, g) · dγ
fdx + gdy,
Γ
onde D = Dxy é aberto com fronteira dada por Γ ;
4. Área de D via Integral de Linha:
a(D) =
ZZ
1
=
2
5. Equação de Stokes:
I
∂S
dxdy
D
I
−ydx + xdy u.a.;
Γ
F · ds =
ZZ
S
~ dS,
(∇ × F) · n
~ dependendo de
onde a superfı́cie S tem fronteira ∂S, orientação positiva e versor normal n
seus pontos.
160
5.4
CAPÍTULO 5. RESULTADOS - CÁLCULO VETORIAL
Exercı́cios - Cálculo Vetorial
1. Se uma força é dada por
F(x, y) = (0, x), (x, y) ∈ R2 ,
calcule o trabalho realizado por tal força,
τ=
Z
Γ
F · dγ,
ao longo da curva Γ representada pelo quarto da circunferência unitária no primeiro
quadrante, orientada no sentido anti-horário. Ainda, como a integral anterior não depende
da parametrização de Γ , desde que seja respeitada a orientação da mesma, resolva a
questão com as seguintes parametrizações γ(t) de Γ :
(a) (cos t, sen t), t ∈ 0, π2 ;
√
(b)
1 − t2 , t , t ∈ [0, 1].
Resolução:
Considere inicialmente a seguinte ilustração do campo de forças atuando ao longo da
curva, onde representamos a direção e o sentido da força, não o seu módulo.
1
Y
1
X
Em relação a (a), como γ ′ (t) = (− sen t, cos t), t ∈ 0, π2 , temos
τ=
Zπ
2
0
=
Zπ
2
0
Zπ
2
F(γ(t)) · γ ′ (t) dt
(0, cos t) · (− sen t, cos t) dt
cos2 t dt
0
Zπ 2
1
=
(1 + cos 2t) dt
2
0
π
sen 2t 2
1
t+
=
2
2
0
1 π
−0
=
2 2
π
= u.t..
4
=
5.4. EXERCÍCIOS - CÁLCULO VETORIAL
161
t
,
1
, t ∈ [0, 1], temos que
Em relação a (b), como γ ′ (t) = − √1−t
2
Z1
F(γ(t)) · γ ′ (t) dt
0
Z1 p
t
, 1 dt
0, 1 − t2 · − √
=
1 − t2
0
Z1 p
=
1 − t2 dt
0
Zπ p
2
1 − sen2 u cos u du
=
0
Zπ √
2
cos2 u cos u du
=
0
Zπ
2
=
cos2 u du
τ=
0
π
= u.t..
4
(Na quarta igualdade anterior, de cima para baixo, usamos a mudança de variáveis:
t = sen u, dt = cos u du. Na última igualdade anterior, de cima para baixo, a integral é
resolvida como no item (a).)
R
2. Calcule ∇f · dγ se f(x, y) = cos(xyπ) e Γ for qualquer curva cuja parametrização tenha
Γ
derivada contı́nua e tenha pontos inicial e final em 1, 12 e (2, 1), respectivamente.
Resolução:
Note primeiramente que não explicitamos a curva Γ , que liga o ponto A = 1, 12 ao ponto
B = (2, 1), pois, com as condições enunciadas neste exercı́cio, o Teorema Fundamental
do Cálculo para Integrais de Linha nos diz que só precisamos, além de f, dos pontos
A e B. Então
Z
∇f · dγ = f(B) − f(A)
Γ
1
= f(2, 1) − f 1,
2
π
= cos(2π) − cos
2
=1−0
= 1.
3. Se F(x, y) = (y, x), existe f tal que F = ∇f e, em existindo, o que o Teorema Fundamental do Cálculo para Integrais de Linha nos diz a respeito disto?
Resolução:
R
F = ∇f para f(x, y) = xy e, via tal teorema fundamental, ydx + xdy é independente da
Γ
curva Γ que ligue quaisquer dois pontos (desde que tal curva tenha parametrização com
derivada contı́nua).
162
CAPÍTULO 5. RESULTADOS - CÁLCULO VETORIAL
4. Use o Teorema de Green para calcular a integral de linha
Z
(1 + xy2 )dx − x2 ydy
Γ
onde Γ é o arco da parábola y = x2 cujos pontos inicial e final são (−1, 1) e (1, 1), respectivamente.
Resolução:
Note primeiramente que tal integral de linha pode ser calculada diretamente, sem ape
larmos para o Teorema de Green, via a parametrização de Γ dada por γ(t) = t, t2 ,
t ∈ [−1, 1]. Entretanto, para calculá-la como requerido no enunciado da questão, devemos obter uma curva Γ ′ tal que Γ ∪ Γ ′ seja fechada. O modo mais direto (e fácil) de se
conseguir isto é considerando o segmento de reta cujos pontos inicial e final sejam (1, 1)
e (−1, 1), respectivamente. (Confira a ilustração seguinte e observe que D é a região
limitada por Γ ∪ Γ ′ , que é orientada no sentido anti-horário.)
Γ′
1
Y
D
Γ
−1
1
0
X
Assim, por um lado, considere f(x, y) = 1 + xy2 e g(x, y) = −x2 y. Logo fy = 2xy e
gx = −2xy. Aplicando daı́ o Teorema de Green a D, obtemos
I
fdx + gdy =
Γ ∪Γ ′
=
ZZ
(gx − fy ) dxdy
Z ZD
(−4xy) dxdy
Z x=1 Z y=1
= −2
2xy dy dx
D
y=x2
x=−1
= −2
= −2
Z x=1
x=−1
Z x=1
x=−1
= 0.
xy2
y=1
y=x2
dx
x − x5 dx
Por outro lado, parametrize agora Γ ′ por (x(t), y(t)) = (−t, 1), t ∈ [−1, 1]. Segue então
5.4. EXERCÍCIOS - CÁLCULO VETORIAL
163
que
Z
2
2
(1 + xy )dx − x ydy =
Γ′
Z1
−1
=
Z1
(1 − t)(−1) − t2 · 0 dt
(t − 1)dt
−1
t2
=
−t
2
= −2.
Para concluir, observe que
Z
I
2
2
(1 + xy )dx − x ydy =
Γ
2
1
−1
2
(1 + xy )dx − x ydy −
Γ ∪Γ ′
= 0 − (−2)
= 2.
Z
(1 + xy2 )dx − x2 ydy
Γ′
5. Use o Teorema de Green para calcular
I p
1 + x3 dx + 2xydy
Γ
onde Γ é o triângulo cujos vértices são os pontos (0, 0), (1, 0) e (1, 3), orientado no sentido
anti-horário.
Resolução:
Considere inicialmente a ilustração que segue, onde é representada a região D delimitada
por Γ .
3
Y
D
O
1
X
Γ é a união de três segmentos orientados, que podem ser facilmente parametrizados.
√
Contudo, o cálculo direto da integral de linha não tem sucesso pois o termo 1 + t3 dt
não pode ser (analiticamente) integrado!
Por outro lado, o Teorema de Green converte a integral de linha numa integral dupla
164
CAPÍTULO 5. RESULTADOS - CÁLCULO VETORIAL
sobre D, que tem solução analı́tica. Assim, sejam f(x, y) =
Então fy = 0 e gx = 2y. Daı́
I
fdy + gdx =
Γ
=
=
ZZ
ZZ
1 + x3 e g(x, y) = 2xy.
(gx − fy ) dxdy
D
D
Z x=1
x=0
=
√
Z x=1
x=0
Z x=1
2y dxdy
Z y=3x
2y dy dx
y=0
2 y=3x
y y=0 dx
9x2 dx
x=0
3 x=1
= 3x x=0
=
= 3.
6. Use o Teorema de Green para calcular a área da elipse cuja fronteira Γ é dada pela equação
2
(x−1)2
+ (y−2)
= 1.
4
9
Resolução:
Parametrize a elipse via x(t) = 2 cos t + 1 e y(t) = 3 sen t + 2, t ∈ [0, 2π], que acarreta
x ′ (t) = −2 sen t e y ′ (t) = 3 cos t para tais valores de t. Então tal elipse tem área dada
por
1
2
I
Z
1 2π
xdy − ydx =
[(2 cos t + 1)(3 cos t) − (3 sen t + 2)(−2 sen t)] dt
2 0
Γ
Z
1 2π =
6(cos2 t + sen2 t) + 3 cos t + 4 sen t dt
2 0
Z 2π
Z 2π
Z 2π
1
sen t dt
cos t dt + 4
1 dt + 3
6
=
2
0
0
0
2π 2π
1 2π
=
6 t 0 + 3 sen t 0 + 4 − cos t 0
2
= 6π u.a.
7. Seja Γ a curva parametrizada por x(t) = 0, y(t) = 2 + 2 cos t e z(t) = 2 + 2 sen t,
t ∈ [0, 2π]. Use o Teorema de Stokes para calcular a seguinte integral de linha:
I
x2 ez dx + x sen y dy + 3y dz.
Γ
Resolução:
Tais equações paramétricas descrevem a circunferência de centro (2, 2) e raio 2 no plano
OYZ, como ilustrado a seguir.
5.4. EXERCÍCIOS - CÁLCULO VETORIAL
165
Z
S
Y
X
Note ainda que, na ilustração anterior, consideramos S como o cı́rculo limitado por Γ = ∂S.
~ = (1, 0, 0) e, pelo Teorema de Stokes,
Então n
I
2 z
∂S
x e , x sen y, 3y · ds =
ZZ
S
∇ × x2 ez , x sen y, 3y · (1, 0, 0) dS.
Daı́, por razões óbvias, basta calcularmos apenas a primeira componente do rotacional.
Assim, hy − gz = 3 − 0.9 Logo, a última integral anterior é calculada por
3
ZZ
dS = 12π u.a.
S
(já que a última integral anterior representa a área de um cı́rculo cujo raio mede 2 u.c.).
8. Sejam F(x, y, z) = (−y, x, z) e S a parte do parabolóide z = 7 − x2 − 4y2 acima do plano
z = 3, orientada
com normais apontando para cima. Use o Teorema de Stokes para calRR
~ dS.
cular I = S (∇ × F) · n
Resolução:
Segue primeiramente uma ilustração de S. (Confira figura 5.1.) Agora, para obtermos
Figura 5.1: S, com OZ como eixo de rotação, acima do plano z = 3, x, y ∈ [−2, 2].
Γ = ∂S, vamos considerar 7 − x2 − 4y2 = 3, isto é, a elipse x2 + 4y2 = 4, que pode
9
g(x, y, z) = x sen y e h(x, y, z) = 3y.
166
CAPÍTULO 5. RESULTADOS - CÁLCULO VETORIAL
ser parametrizada por γ(t) = (2 cos t, sen t, 3), t ∈ [0, 2π]. Tal curva é positivamente
orientada quando vista de cima. Então, pelo Teorema de Stokes, segue que
Z
I = F · dγ
Γ
Z 2π
F(γ(t)) · γ ′ (t) dt
=
0
Z 2π
(− sen t, 2 cos t, 3) · (−2 sen t, cos t, 0) dt
=
0
Z 2π
2 sen2 t + 2 cos2 t dt
=
0
Z 2π
=
2 dt
0
= 4π.
 0
0
Anuncio
Documentos relacionados




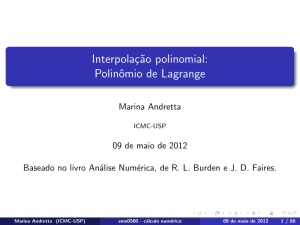
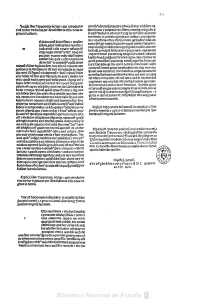


Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados