TEMA 2: RESOLUCIÓN DE ECUACIONES NO LINEALES
Anuncio

Tema 2: Resolución de ecuaciones no lineales.
TEMA 2: RESOLUCIÓN DE ECUACIONES NO LINEALES
2.1.- Introducción
La resolución de ecuaciones en una variable es uno de los problemas clásicos de la
aproximación numérica. Se trata de hallar una raíz de una ecuación de la forma f(x) = 0
para una función dada f. Al valor de x que verifica la ecuación se lo suele llamar también
cero.
Todos los métodos necesitan comenzar por una aproximación inicial a partir de la
cual generan una sucesión que converge a la raíz de la ecuación.
Si [a,b] es un intervalo en el que la función cambia de signo, y f es continua en
dicho intervalo, entonces existe un valor c perteneciente al intervalo (a,b) en el que la
función se anula. Los métodos de bisección y de falsa posición parten de dicho intervalo
para construir una sucesión que siempre converge a la raíz.
2.2.- El método de la bisección
El método comienza con un intervalo de partida [a,b] en el que f(a) y f(b) tienen
distinto signo. El método de bisección consiste en ir acercando sistemáticamente los
extremos del intervalo hasta obtener un intervalo de anchura suficientemente pequeña en
el que se localiza un cero. El proceso de decisión para subdividir el intervalo consiste en
tomar el punto medio del intervalo c = (a+b)/2 y luego analizar las tres posibilidades que
pueden darse:
Si f(a) y f(c) tienen signos opuestos, entonces hay un cero en [a,c].
Si f(c) y f(b) tienen signos opuestos, entonces hay un cero en [c,b].
Si f(c) = 0, entonces c es un cero.
Para continuar el proceso, renombramos el nuevo intervalo más pequeño también
como [a,b] y repetimos el proceso hasta que el intervalo sea tan pequeño como
deseemos.
2.2.1.-
Convergencia del método de bisección
Supongamos que fC[a,b] y que f(a) y f(b) tienen signos distintos. Sea {cn }n
0 la
sucesión de puntos medios de los intervalos generados por el método de bisección dado.
Entonces existe un número r[a,b] tal que f(r) = 0 y, además,
ba
r cn n 1
para n = 0, 1, ...
2
En particular, la sucesión {cn }n
0 converge al cero x = r, esto es, lim cn r .
n
Una de las virtudes del método de bisección es que la fórmula proporciona una
estimación predeterminada de la precisión de la solución calculada. Es fácil demostrar
que el número N de bisecciones sucesivas que nos garantizaría que el punto medio cN es
una aproximación a un cero con un error menor que un valor prefijado es:
10
Tema 2: Resolución de ecuaciones no lineales.
N Ent
FG ln(b a ) ln( ) IJ
H ln(2) K
donde Ent representa la parte entera del argumento.
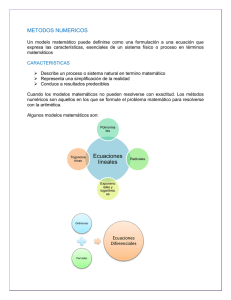
2.3.- El método de la falsa posición (regula falsi)
Otro algoritmo popular es el método de la regula falsi o método de la falsa
posición. Una de las razones de su introducción es que la velocidad de convergencia del
método de bisección es bastante baja. Como antes, supongamos que f(a) y f(b) tienen
distinto signo. Suele conseguirse un aproximación mejor que en el método de la
bisección usando el punto (c,0) en el que la recta secante L que pasa por los puntos
(a,f(a)) y (b,f(b)) cruza el eje OX:
y
Método de la falsa posición
(b,f(b))
c
L
atan m
y = f(x)
x
(a,f(a))
Para hallar el punto c, igualamos dos fórmulas para la pendiente m de la recta L:
f ( b ) f ( a ) f ( b) 0
m
ba
bc
que resultan respectivamente de unir los puntos (a,f(a)) con (b,f(b)), y (c,0) con (b,f(b)).
(b a )
c b f (b)
Despejando c:
f (b ) f ( a )
y las tres posibilidades son las mismas que antes:
Si f(a) y f(c) tienen distinto signo, entonces hay un cero en [a,c].
Si f(c) y f(b) tienen distinto signo, entonces hay un cero en [c,b].
Si f(c) = 0, entonces c es un cero de f.
2.3.1.-
Convergencia del método de la falsa posición
El método construye una sucesión de intervalos [an,bn] cada uno de los cuales
siempre contiene un cero. En cada paso la aproximación al cero viene dada por:
(bn an )
cn bn f (bn )
f (bn ) f (an )
y puede demostrarse que la sucesión {cn} tiende a un cero de la función.
Aunque la amplitud del intervalo se hace cada vez más pequeña, en este método
puede ocurrir que no tienda a cero. Si la curva es convexa cerca de la raíz r entonces uno
de los extremos se hace estacionario y el otro tiende a la solución. Por este motivo el
criterio de parada |b-a| < , que podía ser adecuado para el método de bisección, no lo es
11
Tema 2: Resolución de ecuaciones no lineales.
para éste. Los criterios de parada que se utilizan son el valor de f(cn) y la proximidad
entre las dos últimas aproximaciones.
2.4.- Iteración de punto fijo
Una técnica fundamental de computación científica es la de iteración. Como su
propio nombre sugiere, se trata de repetir un proceso hasta que se obtiene un resultado.
Se usan métodos iterativos p.ej. para hallar raíces de ecuaciones, soluciones de los
sistemas lineales y no lineales y soluciones de ecuaciones diferenciales.
El proceso de iteración para resolver la ecuación x = g(x) consiste en sustituir
repetidamente en la función g(x) el valor previamente obtenido.
Para empezar se necesita un valor de partida p0. Lo que se produce es una sucesión
de valores {pk} obtenida mediante el proceso iterativo pk+1 = g(pk).
La sucesión tiene la siguiente forma:
p0 (valor de partida)
p1 g ( p0 )
p2 g ( p1 )
pk g ( p k 1 )
pk 1 g ( p k )
2.4.1.-
Puntos fijos
Definición. Un punto fijo de una función g(x) es un número real P tal que P = g(P).
Geométricamente hablando, los puntos fijos de una función g(x) son los puntos de
intersección de la curva y = g(x) con la recta y = x.
Definición. 2La iteración pn+1 = g(pn) para n = 0, 1,... se llama iteración de punto fijo.
Teorema del Punto Fijo. Suponiendo que gC[a,b], se puede demostrar que:
1º
Si g(x)[a,b] x[a,b], entonces g tiene al menos un punto fijo P en [a,b].
2º Si además g'(x) está definida en (a,b) y K<1 tal que |g'(x)| K x(a,b), entonces
dicho punto P es el único punto fijo de g en [a,b], y la sucesión {pn} construida a partir
de cualquier p0 perteneciente al intervalo [a,b] converge a P.
Demostración: gráficamente es más intuitivo. En cuanto a la existencia, si g(a) = a o
g(b) = b, ya existe el punto fijo (respectivamente a o b); de lo contrario, g(a) > a y
g(b) < b (ver figura izquierda) con lo que, siendo g(x) continua, para pasar del punto
(a,g(a)) al (b,g(b)) es necesario cruzar la recta y = x: el punto P de corte cumplirá
g(P) = P y será por tanto punto fijo.
12
Tema 2: Resolución de ecuaciones no lineales.
b
y
b
y=x
g(x) P
y
y=x
(b,g(b))
g(x)
(a,g(a))
a
a
a
b
x
P1
P2
Q
a
b
x
En cuanto a la unicidad, si existieran dos puntos fijos distintos P1 y P2 (ver figura
derecha), y existiendo g'(x) en todo (a,b), debe existir algún punto intermedio Q en el
que la tangente a g(x) sea paralela a la recta y = x que une ambos puntos fijos. Su
pendiente es 1, luego tendría que ser g'(Q) = 1, contrariamente a la hipótesis de que –
1 < K g'(x) K < 1. (La demostración formal se basa en el Teorema del Valor Medio de
Lagrange.)
Corolario. Si g verifica todas las hipótesis del Teorema del punto fijo (apartados 1º y
2º), entonces las siguientes desigualdades proporcionan cotas del error que se comete
cuando usamos pn como aproximación a P (para todo n 1):
P pn K n P p0
P pn
Kn
p1 p0
1 K
Nótese que al comenzar el proceso iterativo P es desconocido, y por tanto también
lo es el término derecho de la primera desigualdad, mientras que el de la segunda se
puede evaluar desde el principio.
Demostración:
y
y=x
1
pn–1
pn
y
g(x)
x
P
y=x
2
pn–1
P
pn pn+1
Para demostrar la primera desigualdad (ver figura a la izquierda):
b
g(x)
g
P pn g ( P ) g ( pn 1 ) g ( 1 ) P pn 1 g ( 1 ) P pn 1
K P pn 1 K P pn 2 K P pn 3 K n P p0
2
3
Para demostrar la segunda desigualdad (ver figura a la derecha):
13
x
Tema 2: Resolución de ecuaciones no lineales.
b
g
pn 1 pn g ( pn ) g ( pn 1 ) g ( 2 ) pn pn 1 g ( 2 ) pn pn 1
K pn pn 1 K 2 pn 1 pn 2 K 3 pn 2 pn 3 K n p1 p0
Siendo m > n:
p m pn
( p m pm1 ) ( pm1 pm 2 ) ( pn 2 pn 1 ) ( pn 1 pn )
p m pm1 pm1 pm2 pn 2 pn 1 pn 1 pn
K m1 p1 p0 K m 2 p1 p0 K n 1 p1 p0 K n p1 p0
c
h
K m1 K m 2 K n1 K n p1 p 0
c
h
K n K m n1 K mn 2 K 2 K 1 p1 p0
Tomando el límite cuando m :
lim pm pn lim pm pn P pn
m
c
m
K p1 p0 lim 1 K K 2 K m n 2 K m n 1
n
m
h
y como la suma de la serie geométrica de razón K < 1 es igual a 1/(1–K):
1
Kn
P pn K p1 p0
p1 p0
1 K 1 K
n
lo que concluye la demostración.
2.5.- Convergencia de la iteración de punto fijo
Definición. (Orden de convergencia). Supongamos que { pn }n
0 converge a p y sea
E n p pn para cada n 0. Si existen dos constantes positivas A > 0 y R > 0 tales que
lim
n
p pn 1
p pn
R
lim
n
E n 1
En
R
A
entonces se dice que la sucesión converge a p con orden de convergencia R, y el número
A se llama constante asintótica del error. Los casos R = 1, 2 merecen especial
consideración:
Si R = 1 la convergencia de { pn }n
0 se llama lineal
Si R = 2, la convergencia de { pn }n
0 se llama cuadrática.
Si R es grande, entonces la sucesión {pn} converge rápidamente a p; esto es, para
valores grandes de n tenemos la aproximación En+1 A |En|R. Por ejemplo, si R = 2 y
|En| 10-2, entonces cabe esperar que En+1 A·10-4.
Algunas sucesiones convergen con un orden que no es un número natural. Por
ejemplo, el orden de convergencia del método de la secante es R (1 5 ) 2
1.618033989.
Orden de convergencia de la iteración de punto fijo.
Cuando g'(P) 0:
E n 1 pn 1 P g ( pn ) g ( P ) g ( ) ( pn P ) g ( ) pn P g ( ) En
14
Tema 2: Resolución de ecuaciones no lineales.
con comprendido entre pn y P. Cuando n , g'() g'(P) 0; y siendo g' continua,
g'() se mantendrá, a partir de cierto n, suficientemente cerca de g'(P), de modo que
E n 1 g ( P ) E n
con lo que la convergencia es lineal.
Cuando g'(P) 0, escribiendo el polinomio de Taylor con resto de orden 2:
g ( )
g ( )
2
g ( pn ) g ( P ) g ( P ) p n P
pn P g ( P ) 0
pn P
2!
2!
g ( )
g ( )
2
2
E n 1 p n 1 P g ( p n ) g ( P )
pn P
En
2!
2!
b
g
b
g
b
b
y si g''(P) 0, cuando n :
E n 1
con lo que la convergencia es cuadrática.
g
2
g
g ( P )
2
En
2!
[1]
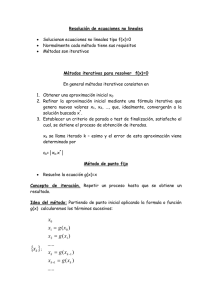
2.6.- El método de Newton-Raphson
Si f(x), f '(x) y f ''(x) son continuas cerca de una raíz p de f, esta información
adicional sobre la naturaleza de f(x) puede usarse para desarrollar algoritmos que
produzcan sucesiones {pk} que converjan a p más rápidamente que en el método de
bisección o en el de la regula falsi. El método de Newton-Raphson, que descansa en la
continuidad de f '(x) y f ''(x), es uno de los algoritmos más útiles y mejor conocidos. Lo
introduciremos gráficamente y luego daremos un tratamiento más riguroso basado en el
teorema de Taylor.
Definimos p1 como el punto de intersección del eje de abcisas con la recta tangente
a la curva en el punto (p0,f(p0)). La figura muestra que p1 estará, en este caso, más cerca
de p que de p0.
y
Método de Newton-Raphson
(p0,f(p0)) atan m
y = f(x)
Obviamente:
m f ( p0 )
(p1,f(p1))
p
p2 p1
x
p0
f ( p0 ) 0
f ( p0 )
p1 p0
p0 p1
f ( p0 )
Este proceso puede repetirse para obtener una sucesión {pk} que converge a p.
Hagamos más precisas estas ideas. Nuestro análisis comienza con el polinomio de
Taylor de grado n = 1 de f alrededor de p0 y su correspondiente resto:
f ( c)
2
f ( x ) f ( p0 ) f ( p0 ) x p0
x p0
2!
b
g
b
g
donde c es un punto intermedio entre p0 y x. Poniendo x = p en la relación y usando que
f(p) = 0 obtenemos:
15
Tema 2: Resolución de ecuaciones no lineales.
b
g
0 f ( p0 ) f ( p0 ) p p0
f ( c)
p p0
2!
b
g
2
Si p0 está suficientemente cerca de p, entonces el último sumando del miembro
derecho de esta última ecuación será pequeño comparado con la suma de los dos
primeros, así que podemos despreciarlo y usar la aproximación:
0 f ( p0 ) f ( p0 ) p p0
b
g
Despejando p en la relación obtenemos que p p0 f ( p0 ) f ( p0 ) , expresión que
usamos para definir p1, la siguiente aproximación a la raíz:
f ( p0 )
p1 p0
f ( p0 )
y lo mismo para p2 a partir de p1, p3 a partir de p2, etc.
Teorema de Newton-Raphson. Supongamos que la función f C2[a,b] y que existe un
número p [a,b] tal que f(p) = 0. Si f '(p) 0, entonces existe > 0 tal que la sucesión
{ pk }k 0 definida por el proceso iterativo
pk g ( pk 1 ) pk 1
f ( pk 1 )
f ( pk 1 )
( k 1, 2,...)
converge a p cualquiera que sea la aproximación inicial p0 [ p , p ] . La función
g(x) definida por la relación
g( x ) x
f ( x)
f ( x)
se llama función de iteración de Newton-Raphson.
Demostración. La construcción geométrica de p1 que se muestra en la figura no nos
ayuda a entender por qué p0 debe estar cerca de p ni por qué la continuidad de f ''(x) es
esencial.
Puesto que f(p) = 0, es fácil ver que g(p) = p, con lo que p es un punto fijo de g.
Además, dado que pk = g(pk-1), la iteración de Newton-Raphson para hallar una raíz de
f(x) = 0 consiste en hallar un punto fijo de g(x) mediante la iteración de punto fijo, con lo
que podremos aplicar el Teorema del Punto Fijo.
De modo que considerando la iteración de Newton-Raphson como una iteración de
punto fijo y aplicando el teorema del punto fijo, en nuestra situación:
f ( x ) f ( x ) f ( x ) f ( x ) f ( x ) f ( x )
g ( x) 1
2
f ( x)2
f ( x )
b
g
Por hipótesis, sabemos que f(p) = 0, luego g'(p) = 0. Como g(x) es continua y
g'(p) = 0, podemos encontrar > 0 tal que la hipótesis |g'(x)| < 1 se cumpla en el intervalo
( p , p ) . Entonces, de acuerdo con el Teorema del Punto Fijo, sólo falta
comprobar que g([p–,p+]) [p–,p+], y en efecto:
|g(x) – p| = |g(x) – g(p)| = |g'() (p – x)| K |p – x| < K <
16
Tema 2: Resolución de ecuaciones no lineales.
Por consiguiente, que p0 ( p , p ) es una condición suficiente para que p0
sea el punto de partida de una sucesión { pk }k 0 que converge a la única raíz de f(x) = 0
en dicho intervalo, siempre que sea elegido tal que:
f ( x ) f ( x )
1 x ( p , p )
f ( x ) 2
Un inconveniente obvio del método de Newton-Raphson es la posibilidad que se
divida entre cero en la fórmula de la iteración, lo que ocurriría si f '(pk-1) = 0.
Definición. (Orden de una raíz). Supongamos que f(x) y sus derivadas f '(x), f ''(x), ...,
f (M)(x) están definidas y son continuas en un intervalo centrado en el punto p. Diremos
que p es un cero de orden M de f(x) si se cumple que f(p) = 0, f '(p) = 0, f ''(p) = 0, ...,
f (M-1)(p) = 0 y f (M)(p) 0.
Las raíces de orden M = 1 se suelen llamar raíces simples, mientras que si M > 1 se
llaman raíces múltiples. En particular, las raíces de orden M = 2 se conocen como
raíces dobles, y así sucesivamente.
Lema. Si una ecuación f(x) = 0 tiene una raíz de orden M en x = p, entonces existe una
función continua h(x) tal que f(x) puede expresarse como el producto:
f ( x ) ( x p) M h( x ) con h( p) 0
2.6.1.-
Velocidad de convergencia
Si p es una raíz simple de f(x) = 0, entonces el método de Newton-Raphson
converge rápidamente, de forma que en cada iteración doblamos (aproximadamente) el
número de cifras decimales exactas. Si, por el contrario, p es una raíz múltiple, entonces
el error en cada paso es una fracción del error en el paso anterior.
El método de Newton-Raphson converge a la raíz doble, pero con una velocidad
más baja: en este caso la convergencia es lineal en lugar de cuadrática.
Gráficamente es fácil intuir que la convergencia será más rápida cuando g'(P) = 0.
Teorema. (Orden de convergencia del método de Newton-Raphson). Supongamos
que el método de Newton-Raphson genera una sucesión { pn }n
0 que converge a un cero
p de la función f(x). Si p es una raíz simple, entonces la convergencia es cuadrática:
f ( p )
2
E n 1
E n para n suficientemente grande
2 f ( p)
y si p es una raíz múltiple de orden M > 1, entonces la convergencia es lineal:
M 1
E n 1
E n para n suficientemente grande
M
[2]
Obsérvese que, siendo lineal, es tanto más lenta cuanto mayor es el orden de la
raíz.
Demostración.
La haremos únicamente para el caso de raíz simple. Recordando que:
17
Tema 2: Resolución de ecuaciones no lineales.
g( x ) x
f ( x)
f ( x ) f ( x )
; g ( x)
f ( x)
f ( x) 2
RS f ( p) 0 (raíz simple)
T f ( p) 0
dado que
RSg ( p) p
T g ( p) 0
y rige [1], siendo la convergencia cuadrática. Derivando g'(x):
g ( x )
f ( x ) 2 f ( x ) f ( x ) f ( x ) f ( x ) f ( x ) f ( x )2 f ( x ) f ( x )
f ( x)4
f ( p) 2 f ( p) f ( p) 0 0 f ( p)
g ( p)
f ( p) 4
f ( p)
y, dado que la raíz p de f es el punto fijo P de g, sustituyendo en [1] queda [2], c.q.d.
2.6.2.-
Inconvenientes y dificultades
Es fácil predecir el error que puede aparecer al dividir entre cero, pero hay otras
dificultades que no son tan fáciles de advertir.
Algunas veces la aproximación inicial p0 está demasiado lejos de la raíz deseada y
la sucesión {pk} converge a otra raíz; esto suele ocurrir cuando la pendiente f '(p0) es
pequeña y la recta tangente a la curva y = f(x) es casi horizontal.
Puede ocurrir que la sucesión que se va construyendo sea divergente, y por lo
tanto, después de N iteraciones no se tenga la solución. Conviene también por este
motivo establecer un número máximo de iteraciones a realizar.
2.6.3.-
Aceleración de la convergencia
El método de Newton-Raphson se puede modificar de forma que su convergencia
sea cuadrática en el caso de raíces múltiples.
Teorema. (Iteración de Newton-Raphson acelerada). Supongamos que el algoritmo
de Newton-Raphson produce una sucesión que converge linealmente a un raíz x = p de
orden M > 1. Entonces la fórmula de iteración de Newton-Raphson acelerada
M f ( pk 1 )
pk pk 1
f ( pk 1 )
genera una sucesión { pn }n
0 que converge cuadráticamente a p.
2.7.- El método de la secante
En el algoritmo de Newton-Raphson hay que evaluar dos funciones en cada
iteración f(pk-1) y f '(pk-1). Tradicionalmente, el cálculo de la derivada de una función
elemental puede llegar a suponer un esfuerzo considerable. Sin embargo, con los
modernos paquetes de cálculo simbólico, esto no es un problema serio. Aun así, hay
muchas funciones dadas de forma no elemental (como integrales, o sumas de series, etc.)
para las que sería deseable disponer de un método que converja casi tan rápidamente
como el de Newton-Raphson y que necesite únicamente evaluaciones de f(x) y no de
18
Tema 2: Resolución de ecuaciones no lineales.
f '(x). El método de la secante necesita sólo una evaluación de f(x) por paso y en una raíz
simple tiene un orden de convergencia R 1.618033989.
La fórmula de iteración del método de la secante es la misma que la que aparece en
el método de la regula falsi; la diferencia entre ambos estriba en la forma de elegir el
siguiente término. Partimos de dos puntos iniciales (p0,f(p0)) y (p1,f(p1)) cercanos al
punto (p,0). Se define p2 como la abscisa del punto de intersección de la recta que pasa
por estos dos puntos con el eje OX. Calculando dicha recta y su punto de corte con el eje
OX se obtiene:
p1 p0
p2 g ( p1 , p0 ) p1 f ( p1 )
f ( p1 ) f ( p0 )
El término general de la sucesión generada por este método viene dado por la
fórmula de iteración de dos puntos:
( pk pk 1 )
pk 1 g ( pk , pk 1 ) pk f ( pk )
f ( pk ) f ( pk 1 )
Aunque la fórmula es la misma que la del método de la falsa posición, la diferencia
fundamental es que no se necesita un cambio de signo de la función en el intervalo
[p0,p1].
Este método también se puede obtener a partir del de Newton sustituyendo f '(pk)
por:
f ( pk ) f ( pk 1 )
pk pk 1
Los términos de la sucesión de errores verifican:
E k 1 E k
1.618
f ( p)
2 f ( p)
0.618
2.8.- Aproximación inicial y criterios de convergencia
En los métodos que parten de un intervalo [a,b] en el que la función cambia de
signo, no importa lo grande que éste sea, se tiene la seguridad de que habrá convergencia
a una raíz. Por esta razón se denominan globalmente convergentes. Sin embargo si en
[a,b] hay varias raíces será necesario determinar intervalos más pequeños para cada una
de ellas, y esto no suele ser fácil.
Los métodos del punto fijo, de Newton-Raphson y de la secante parten de una
aproximación inicial suficientemente próxima a la raíz, por lo que se denominan
localmente convergentes.
Conviene, si es posible, hacer una representación gráfica de la función que
permitirá obtener aproximaciones iniciales a las raíces. Normalmente se emplea un
proceso iterativo que genera una sucesión que converge a la raíz. Es imprescindible
establecer de antemano el criterio de parada que se va a utilizar. Entre los más adecuados
se pueden citar:
19
Tema 2: Resolución de ecuaciones no lineales.
a) |f(pn)| < . Este criterio es útil para resolver ecuaciones de la forma h(x) = L aplicando
el algoritmo a f(x) = h(x)–L.
b)
Proximidad entre las dos últimas aproximaciones:
b1) En términos absolutos:
pn pn 1
b2)
En términos relativos:
pn pn1
pn
Los tamaños de las tolerancias y se deben elegir con cuidado, ya que si se
toman muy pequeños puede ocurrir que sea necesario un número muy alto de
iteraciones. Una buena elección suele ser tomar y unas cien veces mayores que 10-M,
siendo M el número de cifras decimales que utiliza el ordenador en coma flotante.
Conviene también fijar un número máximo de iteraciones a realizar como en
cualquier procedimiento iterativo.
También hay que tener en cuenta que la solución obtenida está afectada por errores
debidos a la inestabilidad del problema y al redondeo.
Si la curva y = f(x) tiene una pendiente alta cerca de la raíz, entonces el problema
está bien condicionado. Sin embargo si esta pendiente es muy pequeña, o sea, si la curva
es casi horizontal, entonces el problema está mal condicionado.
20
Tema 2: Resolución de ecuaciones no lineales.
2.9.- Tema 2. Ejercicios.
1.— Determinar gráficamente el nº de raíces reales de la ecuación no lineal
f(x) = x + e-x = 0.
Sol.: una
2.— Determinar gráficamente el nº de raíces reales de la ecuación no lineal x log10(x) = 1.
Sol.: una
3.— Utilizando el método de la bisección resolver la ecuación no lineal e-x – x = 0
partiendo del intervalo inicial [0,1] y con un error relativo inferior al 25%.
Sol.: x 0.625; er = 20%
4.— Determinar, utilizando el método de la bisección, partiendo del intervalo inicial [0,1]
y con un error absoluto menor que 0.1, la raíz real de la función f(x) = x ex – 1.
Sol.: x 0.5625
5.— Aplicando el método de la bisección a la ecuación x3 – 3 = 0, localizar la raíz cúbica
de 3 sobre un intervalo de longitud menor o igual a 0.1, partiendo del intervalo [1,2].
Sol.: x 1.4375
6.— Empezando con el intervalo [2,3], realizar tres iteraciones del método de falsa
posición a la función f(x) = 4x4 – 9x3 + 1.
Sol.: x 2.19173
7.— Resolver la ecuación no lineal f(x) = e – x = 0 con el método de falsa posición,
sabiendo que la raíz exacta es r = 0.56714329, partiendo del intervalo inicial [0,1].
Obtener, trabajando con redondeo a cuatro cifras decimales, la aproximación de la raíz
con un error relativo inferior al 1%.
-x
Sol.: x 0.5722
8.— Resolver, con error relativo inferior al 0.05%, la ecuación no lineal f(x) = e-x – x = 0
mediante el método de la secante, tomando como valores iniciales x-1 = 0, x0 = 1, y
sabiendo que r = 0.56714329. Trabajar con redondeo a cuatro cifras decimales .
Sol.: x 0.5672
9.— La función f(x) = x – e tiene dos raíces. Hallarlas por el método del punto fijo
(aproximaciones sucesivas) trabajando con redondeo a cuatro cifras decimales.
x/5
Sol.: x 1.2959 (con g(x) = ex/5); x 12.7132 (con g(x) = 5 lnx)
10.— Hallar, con un error no superior a 0.1, la única raíz real de la ecuación algebraica
f(x) = x3 + 2x2 + 10x – 20 = 0
utilizando el método de aproximaciones sucesivas (punto fijo). Seleccionar los valores
iniciales de x en el intervalo [1,2] y trabajar con cinco cifras decimales y redondeo por
truncamiento.
Sol.: con x0 =1.5 y g(x) = 20/(x2+2x+10) x 1.36657; con x0 =1.5 y
g(x) = x (x3+2x2+10x20)·0.05 x 1.36877
21
Tema 2: Resolución de ecuaciones no lineales.
11.— Efectuar una iteración del método de Newton-Raphson para resolver la ecuación
no lineal f(x) = x – 0.2 sin(x) partiendo del valor inicial x0 = 0.5. Trabajar con redondeo a
cuatro cifras decimales.
Sol.: x 0.0099
12.— Realizar tres iteraciones del método de Newton-Raphson para hallar la raíz de la
función f(x) = e-x – x utilizando como aproximación inicial de la raíz buscada x0 = 0 y
trabajando con redondeo a seis cifras decimales.
Sol.: x 0.567143
13.— Encontrar una raíz aproximada de la ecuación x – x – 1 = 0 en el intervalo [1,2]
con precisión de 10-5, primero por el método de Newton y luego por el de la secante.
3
Sol.: x 1.3247 (convergencia más lenta con el método de la secante)
14.— Resolver la ecuación 4 cos(x) = ex con un error absoluto menor que 10-4 , usando:
El método de Newton-Raphson con x0 = 1.
El método de la secante con x0 = /4 y x1 = /2.
Sol.: x 0.904788 (convergencia más lenta con el método de la secante)
15.— Determinar la raíz positiva de la ecuación sin(x) – x/2 = 0 con una precisión de 10-4
(|f(x)| < 10-4), trabajando con redondeo a cinco cifras decimales, utilizando los métodos
de falsa posición y de la secante, partiendo en ambos casos del intervalo [/2, ]
Sol.: x7 1.89539 (falsa posición); x6 1.89549 (secante)
16.— En el intervalo [0.5,1] la función f(x) = x – 0.2 sin(x) – 0.5 tiene una raíz, (siendo
f(0.5) = –0.0959 y f(1) = 0.3317). Aplicar los métodos de bisección, falsa posición,
secante y Newton para determinar dicha raíz con una precisión de 10-2 (|f(x)| < 10-2).
Sol.: x4 0.6094 (bisecc.); x1 0.6121 (falsa pos.); x1 0.6121 (sec.); x1 0.6153
(New.)
17.— Calcular la raíz de la ecuación log10(x2+2) + x = 5 con tres cifras decimales exactas
mediante la aplicación de la técnica de Newton-Raphson.
Sol.: x2 3.78676
18.— Deducir una ley de recurrencia que permita obtener
10 con una precisión de 10-5.
c . Aplicarla al cálculo de
Sol.: xn+1 = (xn + c/xn) / 2; x4 = 3.162277
19.— Deducir una ley de recurrencia para calcular
el cálculo de 7 59 . Comenzando con x0 = 1.5.
n
c . Realizar cuatro iteraciones para
Sol.: xn+1 = [(n1) xn + c / xnn1] / n ; x4 = 1.7906
20.— Resolver la ecuación no lineal x – 4 sin(x) = 0 sabiendo que un valor aproximado de
la raíz es x0 = 2.5. Realizar 3 iteraciones del método de Newton-Raphson.
Sol.: x3 2.47658
21.— Siendo f(x) = 8x – cos(x) – 2x , y sabiendo que f(0) < 0 y f( /6) > 0, justificar que la
expresión
2
22
Tema 2: Resolución de ecuaciones no lineales.
g ( xn )
cos( xn ) xn
8
4
2
permitirá obtener una sucesión cuyo límite sea una raíz de la ecuación f(x) = 0. Hallar la
raíz con una precisión = 10-3.
Sol.: x3 = 0.128101
22.— Determinar la raíz cuadrada negativa de 0.5 con cuatro decimales y una precisión
de 10-3 considerando la función F(x) = x2 – 0.5 y resolviendo la ecuación x = x2 + x – 0.5
mediante el método de aproximaciones sucesivas tomando x0 = –0.6. ¿Puede
determinarse la raíz cuadrada positiva por este método?
Sol.: x7 = 0.7073; no se puede
23.— Muéstrese en forma gráfica que la ecuación 4 sin(x) = 1 + x tiene tres raíces reales
r1 < r2 < r3. A continuación determínese con una precisión de 10-3 y trabajando con
redondeo a seis cifras decimales:r1 utilizando el método de la secante
r2 utilizando el método de bisección
r3 utilizando el método de Newton
Comparar estos métodos.
Sol.: [-,-/2], r1 x6 = 2.702061; [0, /2], r2 x10 = 0.342845; r3 x3 = 2.210084
(con x0=3 /4)
24.— Hacer una representación gráfica aproximada de las funciones f(x) = 2 cos(x) y
g(x) = ex para obtener estimaciones iniciales de las raíces de la ecuación 2 cos(x) – ex = 0.
¿Cuántas raíces tiene? ¿Cuántas son positivas?
Determinar las raíces positivas con una precisión |f(r)| < 10-3 utilizando el método
de la secante y el método de Newton-Raphson.
Nota: utilizar 3 cifras decimales y trabajar en radianes.
Sol.: negativas, 1 positiva: 0.540
23