Definiciones y conceptos del tema 1
Anuncio

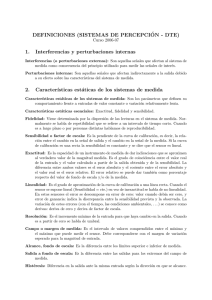
DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso 2009-10 1. Generalidades Instrumentación: En general la instrumentación comprende todas las técnicas, equipos y metodologı́a relacionados con dispositivos fı́sicos que permiten mejorar, complementar o aumentar la eficacia de los mecanismos de percepción sensorial y de comunicación del hombre. Transductor: Es un dispositivo que convierte una señal de una forma fı́sica en una señal correspondiente pero de otra forma fı́sica distinta. Sensores: Transductor de entrada. Actuadores: Transductores de salida. Medidas directas: Son aquellas que se realizan mediante comparación directa con una referencia. Medidas indirectas: Se obtienen a partir de otras medidas y aplicando la ecuación de la ley que las relaciona. 2. Tipos de sensores Clasificación en función de: • Aporte de energı́a • Señal de salida • Modo de funcionamiento • Relación entrada – salida • Magnitud medida • Ingenierı́a electrónica En función del aporte de energı́a pueden ser: Moduladores: La energı́a procede de una fuente auxiliar Generadores: La energı́a de salida es suministrada por la entrada En función de la señal de salida: Analógicos: Macroscópicamente la señal varı́a de forma continua Digitales: La salida varı́a en forma de saltos o pasos discretos En función del modo de funcionamiento: De deflexión: La magnitud medida produce algún efecto fı́sico, que engendra algún efecto similar, pero opuesto, en alguna parte del instrumento, y que está relacionado con alguna variable útil. De comparación: Se intenta mantener nula la deflexión mediante la aplicación de un efecto opuesto al generado por la magnitud a medir. Hay un detector de desequilibrio y un medio para restablecerlo. 1 Definiciones de Sistemas de Percepción (DTE) 2 En función de la relación entrada – salida: Está relacionado con el número de elementos almacenadores de energı́a en el sensor. Influye en su exactitud y velocidad de respuesta. Pueden ser de: Orden cero primer orden, segundo orden y orden superior. En función de la magnitud medida: Sensores de temperatura, presión, caudal, humedad, posición, velocidad, aceleración, fuerza, par, etc. En función de ingenierı́a electrónica: De parámetro variable: Resistencia Capacidad Inductancia Generadores de señal: Tensión Carga Corriente 3. Interferencias y perturbaciones internas Interferencias (o perturbaciones externas): Son aquellas señales que afectan al sistema de medida como consecuencia del principio utilizado para medir las señales de interés. Perturbaciones internas: Son aquellas señales que afectan indirectamente a la salida debido a su efecto sobre las caracterı́sticas del sistema de medida. 4. Caracterı́sticas estáticas de los sistemas de medida Caracterı́sticas estáticas de los sistemas de medida: Son los parámetros que definen su comportamiento frente a entradas de valor constante o variación relativamente lenta. Caracterı́sticas estáticas esenciales: Exactitud, fidelidad y sensibilidad. Calibración: Permite definir las caracterı́sticas estáticas esenciales. Se utiliza un instrumento de calidad superior. Fidelidad: Viene determinada por la dispersión de las lecturas en el sistema de medida. Normalmente se habla de repetibilidad que se refiere a un intervalo de tiempo corto. Cuando es a largo plazo o por personas distintas hablamos de reproducibilidad. Sensibilidad o factor de escala: Es la pendiente de la curva de calibración, es decir, la relación entre el cambio en la señal de salida y el cambio en la señal de la medida. Si la curva de calibración es una recta la sensibilidad es constante y se dice que el sensor es lineal. Exactitud: Es la capacidad de un instrumento de medida de dar indicaciones que se aproximen al verdadero valor de la magnitud medida. Definiciones de Sistemas de Percepción (DTE) 3 Error: Discrepancia entre la indicación del instrumento y el verdadero valor. error absoluto = resultado - verdadero valor error absoluto error relativo = verdadero valor También se puede indicar en % referido al fondo de escala o al valor de la lectura. Errores sistemáticos: Se mantienen constantes después de medidas repetidas por lo que se pueden evitar mediante una adecuada calibración. Errores aleatorios: Permanecen después de corregir los errores sistemáticos. Linealidad: Es el grado de aproximación de la curva de calibración a una lı́nea recta. Cuando el sensor se supone lineal (Sensibilidad = cte.) en vez de inexactitud se habla de no linealidad. En estos sensores el error se puede descomponer en error de cero: valor de la salida cuando debı́a ser cero, y error de ganancia: indica la discrepancia entre la sensibilidad prevista y la observada. La variación de estos errores (con el tiempo, las condiciones ambientales, . . . ) se conoce como derivas: deriva de cero y deriva de factor de escala. La recta de referencia puede obtenerse (entre otros) por: mı́nimos cuadrados, ajustada a cero, terminal, a través de los extremos, teórica. Resolución: Es el incremento mı́nimo de la entrada para que haya cambio en la salida. Cuando es a partir de cero se habla de umbral. En instrumentos digitales se debe tener en cuenta las caracterı́sticas del convertidor A/D y el rango de medida considerado. Campo o margen de medida: Es el intervalo de valores comprendidos entre el mı́nimo y el máximo que puede medir el sensor. Debe corresponderse con el margen de variación esperado para la magnitud de entrada. Alcance, fondo de escala: Es la diferencia entre los lı́mites superior e inferior de medida. Salida a fondo de escala: Es la diferencia entre las salidas para los extremos del campo de medida. Salida, Y Ys Yi Magnitud a medir, Xi Xs X Campo de medida Alcance, Fondo de escala = XS − XI Salida a fondo de escala = YS − YI Histéresis: Diferencia en la salida ante la misma entrada según la dirección en que se alcance. Definiciones de Sistemas de Percepción (DTE) 4.1. 4 Resolución con instrumentos digitales Resolución: La porción de señal más pequeña que puede ser observada. Está determinada por el conversor A/D del dispositivo de medida y por el margen de medida en el que opere. Hay varias formas de caracterizar la resolución: bits, dı́gitos y cuentas. Además se debe conocer el alcance de la medida (fondo de escala F E). La resolución (Res) expresada en unidades de la magnitud medida vendrá dada por: Res = 4.2. FE N o ctas. Propagación de errores Esto es aplicable a las medidas indirectas. Un procedimiento conservador (valor máximo del error sobreestimado) es el siguiente: Para suma y resta de magnitudes valor máximo del error absoluto es la suma de las cotas de los errores absolutos de las magnitudes implicadas. Para productos y cocientes de magnitudes el error relativo (máximo) es la suma de los errores relativos (máximos) de las magnitudes implicadas. 5. Caracterı́sticas dinámicas de los sistemas de medida La presencia de elementos almacenadores de energı́a (inercias y capacidades) hace que la respuesta del sensor a señales de entrada variable sea distinta a la debida a entradas constantes. Error dinámico= Valor exacto - Valor indicado (con error estático = 0) Retardo: Velocidad de respuesta: indica la rapidez con que el sistema de medida responde a cambios en la entrada. Estas caracterı́sticas se miden mediante entradas tipo escalón, impulso, rampa, periódicas y aleatorias. Clasificación según el orden del sistema en: orden cero, primer orden,... 6. Caracterı́sticas de entrada: impedancia Error por carga: Cuando, debido a la extracción de energı́a del sistema donde se mide, la variable medida queda alterada. Variables esfuerzo: Tensión eléctrica, presión, temperatura, fuerza y par mecánicos. Variables flujo: Corriente eléctrica, caudal volumétrico, velocidad lineal y angular. Impedancia de entrada: cociente entre una variable esfuerzo (x1 ) y variable flujo (x2 ). x1 Z(s) = x2 Si se mide una variable esfuerzo la impedancia debe ser grande. Admitancia de entrada: inversa de la impedancia (cociente entre variable flujo y variable esfuerzo). x2 Y (s) = x1 Si se mide una variable flujo la admitancia debe ser grande. Definiciones de Sistemas de Percepción (DTE) 7. 5 Sensores primarios No siempre es posible encontrar un sensor adecuado para una magnitud con salida directamente eléctrica.