= kx ny )( )( 21 21 )( + − + = z z z zX
Anuncio
( )( 21 21 )( + − + = z z z zX")
eman ta zabal zazu
UPV, Facultad de Informática
Dpto. de Arquitectura y Tecnología de Computadores
PROCESADO DIGITAL DE IMAGEN Y SONIDO
Tema 5: TRANSFORMADA Z
Ejercicios:
1) Para las señales siguientes:
n
1
x4 (n) = [u(n) − u(n − 10)]
2
x1 (n) = {3,0,0,0,0,6,1,−4}
↑
1 n
, n ≥ 0
3
x5 (n) = −n
1 ,
n<0
2
x6 (n) = {1,0,−1,0,1,0,−1,...}
1
x2 (n) = 2 , n ≥ 5
0,
n≤4
x3 (n) = (1 + n)u(n)
n
a) Determina la transformada z.
b) Dibuja la región de convergencia.
c) Si es posible, determina una forma compacta racional de la
transformada y dibuja el diagrama de polos y ceros.
2) Expresa en términos de X(z) la transformada z de:
y(n) =
n
∑ x(k )
k =−∞
(Recomendación: calcula primero la diferencia: y(n) − y(n −1) )
3) Determina efectuando la división de polinomios, la transformada z inversa
de:
1 + 2z −1
X ( z) =
1 − 2z −1 + z −2
a) si x(n) es causal.
b) si x(n) es anticausal
4) Determina la convolución de las dos señales siguientes por medio de la
transformada z:
n
1
x2 (n) = δ (n) + u(n)
2
x1 (n) = u(n)
5) Demuestra que los dos sistemas siguientes son equivalentes:
a) y(n) = 0.2 y(n −1) + x(n) − 0.3x(n −1) + 0.02x(n − 2)
b)
y(n) = x(n) − 0.1x(n −1)
6) Para el sistema LTI con función de transferencia:
2 + 1.5z −1
H ( z) =
1 − 0.5z −1 1 + 2z −1
(
)(
ROC : 0.5 < z < 2
)
a) Dibuja el diagrama de polos y ceros ¿Es estable el sistema?
b) Determina la respuesta a impulso h(n) del sistema.
7) Queremos diseñar un sistema LTI causal que para la entrada :
n −1
n
1 1
1
x(n) = u(n) − u(n −1)
4 2
2
produce la salida:
n
1
y(n) = u(n)
3
a)
Calcula la función de transferencia y la respuesta a impulso de dicho
sistema.
b)
Encuentra una ecuación en diferencias que caracterice al sistema
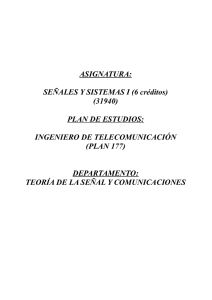
8) Determina la función de transferencia y la respuesta a impulso del sistema
de la figura:
x(n)
z-1
z-1
y(n)
a
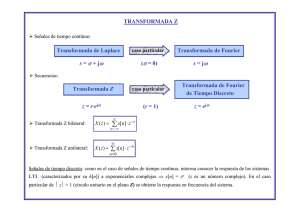
9) Dado el diagrama de polos y ceros de la figura, correspondiente a un
sistema LTI:
Im(z)
-3
-0.5
1
Re(z)
2
a)
Determina la ROC de la función de transferencia del sistema en el
caso de que sea estable.
b)
¿Es posible que a este diagrama le pueda corresponder un sistema
causal y estable? En ese caso ¿con qué ROC?
c)
Cuantos sistemas diferentes se pueden asociar con este diagrama.
10) Dado el sistema de la figura:
e(n)
x(n)
T2
s(n)
y(n)
T1
T3
y la descripción de cada uno de los subsistemas siguiente:
T1:
h1 (n) = {1,1,1,0,0,0, }
T2:
s(n) = 0.3s(n −1) + 0.1e(n)
T3:
0.27z −1
H3 ( z) =
1 + 0.81z −2
a)
Obtén la función de transferencia del sistema completo.
b)
Dibuja el diagrama de polos y ceros y analiza si es estable.