Asignatura: CONTROL DE PROCESOS
TEMA:
- Sistema de segundo Orden
(Parte I I )
Facultad de Ingeniería – UNER
Carrera: Bioingeniería
Plan de estudios: 1993
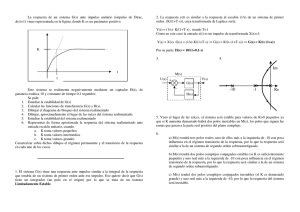
Recordando lo visto como la ecuación diferencial de segundo orden:
Y’’(t)+2ξwnY’(t)+wn2Y(t) = Kwn2X(t)
donde: X(t) = entrada
Y(t) = salida
Aplicando Laplace y considerando condiciones iniciales nulas:
Y ( s)
Kwn 2
G( s) =
= 2
X ( s ) s + 2ξwns + wn 2
K
= 2 2
T s + 2ξTs +1
Función de transferencia de segundo orden
Donde:ξ= coeficiente de amortiguamiento, normalmente 0< ξ<1
wn= frecuencia natural no amortiguada (suponiendo ξ=0)
o igual a la inversa de T wn=1/T
K= ganancia del sistema
En el denominador de G(s) se encuentran los polos, que dan
la estabilidad y características a la respuesta, para
encontrarlos hacemos:
D(s) = s2+2ξwns+wn2 = 0 => y Aplicando la
resolvente => Da
Si ξ<1 Los polas son
Complejos conjugados:
Definiendo σ
y ωd como
−σ ± jwd
−ξwn ± wn ξ −1
2
wd = wn 1 − ξ 2
σ = ξwn
En el denominador de G(s) se encuentran los polos, que dan
la estabilidad y características a la respuesta, para
encontrarlos hacemos:
D(s) = s2+2ξwns+wn2 = 0 => y Aplicando la
resolvente => Da
Si ξ<1 Los polas son
Complejos conjugados:
Definiendo σ
y ωd como
−ξwn ± jwd
−ξwn ± wn ξ −1
2
wd = wn 1 − ξ 2
σ = ξwn
Polos en:
− ξwn ± wn ξ 2 −1 = −σ ± jωd
La Salida Y(s)
Para excitación Escalón
De entrada M es
Separando
En Frac. Parciales
⇒son
Complejos
conjugados
K wn 2
M
Y (s) =
*
2
2
( s + ζwn ) + wd )
s
[
]
A
Ms + N
Y (s) = +
s ( s + ζwn) 2 + wd 2 )
[
]
antitransformando, obtenemos:
ξ
(−ξ ωn t )
Y (t ) = 1 − e
cos(wd t ) +
sen( wd t )
2
1
−
ξ
ξ
(−σ t )
y (t ) = 1 − e
cos( wd t ) +
sen( wd t )
2
1
−
ξ
Reordenando queda:
y (t ) = 1 −
y (t ) = 1 −
Siendo
e
1− ξ 2
e
1− ξ 2
(−ξωn t )
sen( ωd t + ϕ )
t
(−ξ )
T sen( ω t + ϕ )
d
1−ξ 2
ϕ = tg −1
ξ
Por lo tanto el comportamiento del sistema de
segundo orden se puede describir a partir de dos
parámetros ξ y wn.
Si 0<ξ<1, los polos son complejos conjugados y
están en el semiplano izquierdo del plano s,
SISTEMA SUBAMORTIGUADO y la respuesta es
oscilatoria atenuada.
En caso de ξ >1, los polos son reales distintos, la
respuesta no es oscilatoria y SISTEMA
SOBREAMORTIGUADO
Para ξ =1, los polos son reales negativos iguales, la
respuesta es CRITICAMENTE AMORTIGUADA
Parámetros característicos
Tiempo de retardo: Definido como el
tiempo cuando la respuesta alcanza la
mitad del valor final por primera vez.
Parámetros característicos
Tiempo de crecimiento: tiempo para que
la respuesta aumente del 0 al 100 % de su
valor final.
Parámetros característicos
Tiempo pico:
tiempo requerido
para que la
respuesta alcance
el primer pico de
sobreimpulso
Tp =
Tπ
(1 − ξ )
2
Tiempo de establecimiento:es el tiempo que la respuesta requiere para alcanzar y
mantenerse en un rango alrededor de su valor final, puede ser 2% o 5%.
Parámetros característicos
ts
4 4T
4
tes = =
=
σ
ξ ξωn
Máximo sobreimpulso (porcentual):
definido como:
Parámetros característicos
c (tp ) − c(inf .)
*100
c(inf .)
Mp
Mp% = exp(
− πξ
(1 − ξ )
2
)
Parámetros característicos
Relación de subsecuencia: definido como la
relación A2/A1 = A3/A2
Ver gráfica en pizarrón
Ver con ProgramCC evolución frente a Rampa
Sistemas con tiempo
muerto
Se entiende por tiempo muerto una demora
en la medición o un retardo en el
funcionamiento del accionador
Aproximaciones:
e
− (Ts )
e
− (Ts )
1
≅
Ts + 1
1 − (T 2) s
≅
1 + (T 2) s
 0
0