Sistemas Fisicos - Universidad Autónoma de Nuevo León
Anuncio

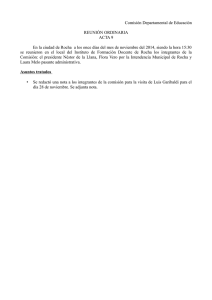
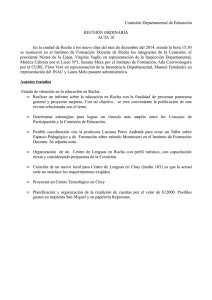
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Sistemas Físicos INGENIERÍA DE CONTROL. 1 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Modelos de sistemas Para analizar los sistemas de control se necesitan modelos matemáticos. Estos modelos son ecuaciones que representan la dinámica del sistema. La dinámica de los sistemas se describe en términos de ecuaciones diferenciales. Dichas ecuaciones diferenciales se obtienen a partir de leyes físicas que gobiernan un sistema determinado. Sistemas eléctricos Las leyes fundamentales que gobiernan los circuitos eléctricos son las leyes de Kirchhoff. Ley de nodos, la suma algebraica de todas las corrientes que entran y salen de un nodo es cero. Ley de voltajes, en cualquier instante determinado la suma algebraica de los voltajes alrededor de cualquier malla es cero. Un circuito está formado por inductancias L (henry), resistencias R (ohm) y capacitancias C (farad). La caída de tensión en una inductancias es proporcional a la variación de corriente el = L di dt La caída de tensión en una resistencia es proporcional a la corriente er = R i La caída de tensión en un capacitor es proporcional a la cantidad de corriente que pasa a través de el ec = 1 idt . C ∫ Ejemplo 1 Ecuación de la malla ei = e r + eo ecuaciones de cada uno de los elementos. e r = Ri , eo = 1 i dt C ∫ Transformando en Laplace Ei (s ) = E R (s ) + E 0 (s ), E R = RI (s ), E0 (s ) = 1 I (s ) sC Sustituyendo E i ( s ) = RI ( s ) + 1 I ( s) sC agrupando y despejando I (s ) I ( s) = sC Ei ( s) ( RCs + 1) como E o ( s) = ei = variable de entrada e0 = variable de salida INGENIERÍA DE CONTROL. 1 I ( s) sC E o ( s) 1 = E i ( s ) ( RCs + 1) 2 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN ei = variable de entrada eR = variable de salida ei = variable de entrada i = variable de salida FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA ER (s) RCs = Ei ( s) ( RCs + 1) I (s) Cs = Ei ( s ) ( RCs + 1) Ejemplo 2 Ecuación de la malla ei = el + e r + eo ecuaciones de cada uno de los elementos el = L di 1 , e r = Ri , ec = i dt dt C ∫ Transformando en Laplace E i (s ) = E L (s ) + E R (s ) + E 0 (s ) E L (s ) = LsI (s ), E R (s ) = RI (s ), E c (s ) = 1 I (s ) sC sustituyendo 1 I ( s) sC agrupando y despejando I (s ) sC I ( s) = Ei ( s ) 2 LCs + RCs + 1 E i ( s ) = LsI ( s ) + RI ( s ) + ei = variable de entrada i = variable de salida I ( s) sC = Ei ( s ) LCs 2 + RCs + 1 Como 1 I ( s) sC ei = variable de entrada E o ( s) = e0 = variable de salida E o ( s) 1 = E i ( s ) LCs 2 + RCs + 1 INGENIERÍA DE CONTROL. 3 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Ejemplo 3 Ecuaciones de las mallas ei = e r1 + e c1 ec1 = e r 2 + e o ecuaciones de cada uno de los elementos er1 = R1i1 , e r 2 = R 2 i 2 , ec1 = eo = 1 C2 ∫i 2 1 C1 ∫ (i 1 − i 2 )dt dt Transformando en Laplace Ei (s ) = E R1 (s ) + EC1 (s ) EC1 (s ) = E R 2 (s ) + E 0 (s ) E R1 (s ) = R1 I 1 , E 0 (s ) = E R 2 (s ) = R 2 I 2 , E C1 (s ) = 1 (I1 (s ) − I 2 (s )) sC1 1 I 2 (s ) sC 2 sustituyendo 1 (I 1 ( s ) − I 2 ( s ) ) = R 2 I 2 ( s ) + E o ( s ) sC1 Despejando I1 (s ) y sustituyendo I 2 (s ) I 2 ( s ) = sC 2 E o ( s ) I 1 ( s ) = C 2 sE o ( s ) + C1 R2 C 2 s 2 E o ( s ) + C1 sE o ( s ) Como Ei ( s ) = E R1 ( s ) + E R 2 ( s ) + Eo ( s ) E i ( s ) = R1 I 1 ( s ) + R2 I 2 ( s ) + E o ( s ) Sustituyendo I 1 ( s), I 2 ( s) en esta última ec. Ei ( s ) = R1C 2 sE o ( s ) + R1C1 R2 C 2 s 2 E o ( s ) + R1C1 sE o ( s ) + R2 C 2 sE o ( s ) + E o ( s ) ( ) Ei ( s ) = R1C1 R2 C 2 s 2 + (R1C1 + R2 C 2 + R1C 2 )s + 1 E o ( s ) ei = variable de entrada e0 = variable de salida E o ( s) 1 = 2 E i ( s ) R1C1 R 2 C 2 s + (R1C1 + R2 C 2 + R1C 2 )s + 1 INGENIERÍA DE CONTROL. 4 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Sistemas mecánicos Las formas básicas de bloque funcionales de sistemas mecánicos son resortes, amortiguadores y masas. La ley fundamental que controla los sistemas mecánicos es la segunda ley de Newton. En el caso de un resorte donde el estiramiento o compresión es proporcional a las fuerzas aplicadas. F =kx Donde k es una constante En el caso de un amortiguador, La fuerza del amortiguador F es proporcional a la velocidad v del pistón. La velocidad es la razón de cambio del desplazamiento x F = cv F =c dx dt donde c es una constante. En el caso de la masa, la relación entre la fuerza F y la aceleración a está relacionada con la segunda ley de Newton. F = ma Donde a es la aceleración que es la razón de cambio de la velocidad. Es decir dv dt . F = ma = m INGENIERÍA DE CONTROL. dv d 2x =m 2 dt dt 5 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Ejemplo 1 ma = F − kx − cv = F − kx − c m d 2x dt m 2 d 2x dt 2 = F − kx − c +c dx dt dx dt dx + kx = F dt Transformando en Laplace y considerando las condiciones iniciales iguales a cero. ms 2 X ( s) + csX ( s) + kX ( s) = F ( s ) (ms 2 ) + cs + k X ( s ) = F ( s) X (s) 1 = F ( s) ms 2 + cs + k Función de Transferencia Ejemplo 2 ma = 0 − b(v 0 − v i ) − k (x o − x i ) = 0 m d 2 x0 dt m 2 d 2 x0 dt 2 dx dx + b 0 − i dt dt +b + k (x o − x i ) = 0 d x0 dx + kx 0 = b i + kx i dt dt Transformando en Laplace (ms 2 ) + bs + k X o ( s) = (bs + k )X i ( s) X o ( s) bs + k = 2 X i ( s ) ms + bs + k INGENIERÍA DE CONTROL. 6 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Sistemas de nivel de líquido Resistencia y capacitancia de sistemas de nivel de líquido Sea el flujo a través de una tubería corta que conecta dos tanques. En este caso la resistencia al flujo del líquido se define como la variación de diferencia de nivel (diferencia de niveles de líquido entre dos tanques) necesaria para producir una variación unitaria en el gasto. R= cambio en la diferencia de niveles cambio en el gasto Capacitancia C de un tanque se define como la variación en la cantidad de líquido acumulado, necesaria para producir una variación unitaria en el potencial ( presión hidrostática). (El potencial es la magnitud que indica el nivel de energía del sistema). C= cambio en la cantidad del líquido almacenado cambio en el nivel Ejemplo 1 Considere el sistema que aparece en la figura. El flujo de entrada menos el flujo de salida durante el pequeño intervalo de tiempo dt es igual a la cantidad adicional almacenada en el tanque. C dh = (q i − q o ) dt La relación entre q o y h qo = h R La ecuación diferencial quedaría. RC dh + h = R qi dt donde h es la salida y q i es la entrada. Transformando en Laplace ( RCs + 1) H ( s) = RQi ( s) H ( s) R = Qi ( s ) RCs + 1 INGENIERÍA DE CONTROL. 7 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Ejemplo 2 Sistema de nivel con interacción. Considere el siguiente sistema. Las ecuaciones serían. h1 − h2 = q1 R1 C1 dh1 = q − q1 dt h2 = q2 R2 C2 dh2 = q1 − q 2 dt Obteniendo la transformada de Laplace. H 1 ( s) − H 2 ( s) = Q1 R1 C1 sH 1 ( s) = Q ( s ) − Q1 ( s ) H 2 ( s) = Q2 ( s ) R2 C 2 sH 2 ( s ) = Q1 ( s) − Q2 ( s) Si se considera a q como entrada y a q 2 como salida. Q2 ( s) 1 = 2 Q(s) R1C1 R2 C 2 s + ( R1C1 + R2 C 2 + R2 C1 ) s + 1 INGENIERÍA DE CONTROL. 8 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Diagrama de bloques por elementos Circuito eléctrico Ejemplo 1 Ecuación de la malla ei = e r + eo ecuaciones de cada uno de los elementos. e r = Ri , eo = 1 i dt C ∫ Transformando en Laplace Ei (s ) = E R (s ) + E 0 (s ), E R = RI (s ), E0 (s ) = 1 I (s ) sC Ejemplo 2 Ecuaciones de las mallas ei = e r1 + e c1 ec1 = e r 2 + e o ecuaciones de cada uno de los elementos er1 = R1i1 , e r 2 = R 2 i 2 , ec1 = eo = 1 C2 ∫i 2 1 C1 ∫ (i 1 − i 2 )dt dt Transformando en Laplace Ei (s ) = E R1 (s ) + EC1 (s ) EC1 (s ) = E R 2 (s ) + E 0 (s ) E R1 (s ) = R1 I 1 , E R 2 (s ) = R2 I 2 , INGENIERÍA DE CONTROL. EC1 (s ) = 1 (I1 (s ) − I 2 (s )), sC1 9 E 0 (s ) = 1 I 2 (s ) sC 2 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Ejemplo 3 Sistema de nivel con interacción. Considere el siguiente sistema. Las ecuaciones serían. h1 − h2 = q1 R1 C1 dh1 = q − q1 dt h2 = q2 R2 C2 dh2 = q1 − q 2 dt Obteniendo la transformada de Laplace. H 1 (s) − H 2 (s) = Q1 R1 C1 sH 1 ( s ) = Q ( s ) − Q1 ( s ) H 2 ( s) = Q2 ( s ) R2 C 2 sH 2 ( s ) = Q1 ( s ) − Q2 ( s ) INGENIERÍA DE CONTROL. 10 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Motor de cd controlado por armadura: Flujo en el entrehierro Ψ = K fif El par desarrollado por el motor T = K f i f K1ia Si la corriente de campo es constante, T = Ki a Para un flujo constante la tensión inducida en la armadura (fuerza contra electromotriz) eb = K b dθ dt La ecuación diferencial del circuito de armadura es. La di a + R a i a + eb = e a dt La corriente de armadura produce el par que se aplica a la inercia y fricción de la carga J d 2θ dt 2 +b dθ = T = Kia dt Tomando la transformada de Laplace inversa K b sθ( s ) = E b ( s) (La s + Ra )I a ( s) + Eb ( s ) = E a ( s ) (Js 2 ) + bs θ( s ) = T ( s ) = KI a ( s) Si consideramos la inductancia de armadura La despreciable, nos queda Km θ( s ) = E a ( s ) s (Tm s + 1) donde. K m = K (Ra b + KK a ) INGENIERÍA DE CONTROL. Tm = Ra J (Ra b + KK b ) 11 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA Sistema de servo posición. r = señal de entrada c = señal de salida Para el potenciómetro detector de error: E ( s ) = K1 [R( s ) − C ( s )] Amplificador: Ea (s) = K p E ( s) Motor controlado por armadura: Km θ( s ) = E a ( s ) s (Tm s + 1) donde. K m = K (Ra b + KK a ) Tm = Ra J (Ra b + KK b ) Momento de inercia equivalente J y el coeficiente de fricción viscosa equivalente b referido al eje del motor J = J m + n2 J L b = bm + n 2 bL Relación de engranes C ( s) = N1 1 θ( s ) = θ( s ) N2 10 La función de transferencia del servo posición sería: K1 K p K n C ( s) = 2 R( s ) Tm s + s + K1 K p K n INGENIERÍA DE CONTROL. 12 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ.. UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN ei FACULTAD DE INGENIERÍA MECÁNICA Y ELÉCTRICA eo E o ( s) ( R1C1 s + 1)( R2 C 2 s + 1) = Ei ( s) ( R1C1 s + 1)( R2 C 2 s + 1) + R2 C1 s Ejemplo: •• m x1 + k1 (x1 − x 2 ) + k 2 x1 = 0 • b k2 b1 x 2 + k1 (x 2 − x1 ) = 0 x2 Transformando en Laplace ms 2 X 1 ( s ) + k1 ( X 1 ( s ) − X 2 ( s )) + k 2 X 1 ( s) = 0 b1 sX 2 ( s ) + k1 ( X 2 − X 1 ) = 0 k1 m sustituyendo x1 ms 2 X 1 ( s ) + bsX 2 ( s ) + k 2 X 1 ( s ) = 0 X 2 ( s ) − (ms 2 + k 2 ) = X 1 ( s) bs xi k1 • • b1 • • • b1 ( x o − x i ) + k1 ( xo − xi ) + b2 ( x o − y ) = 0 • b2 ( y − x o ) + k2 y = 0 x0 b2 y k2 INGENIERÍA DE CONTROL. 13 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HDZ..