Reguladores PID. Perturbaciones y sensibilidad
Anuncio

Diseño de Reguladores
Continuos en el Dominio
del Tiempo
Indice
• 6.1. Especificaciones de diseño
• 6.2. Diseño de reguladores de cancelación
• 6.3. Acciones de control clásicas: Reguladores PID
• 6.4. Diseño de reguladores PID
• 6.5. Control de las perturbaciones
Diseño de Reguladores en el Dominio del Tiempo
1) Determinar qué debe hacer el sistema y cómo debe hacerlo:
Especificaciones de diseño.
2) Determinar la configuración de la estructura de control y el
tipo de regulador.
3) Determinar los parámetros del regulador para alcanzar los
objetivos de diseño.
Especificaciones de Diseño en el Dominio del Tiempo
• Precisión en régimen permanente: ep, ev y ea.
• Respuesta transitoria: Mp, tp, tr, ts.
• Control de las perturbaciones.
• Limites en la acción de control
1.4
Acciones de Control Clásicas
1.2
1
x(t)
0.8
y(t)
0.6
P
x(t) +
I
_
D
0.4
1
2 +
3
+
0
­5
1
y(t)
5
10
15
20
25
30
0
5
10
15
20
25
30
0
5
10
15
20
25
30
0
5
10
15
20
25
30
0.8
Sistema
0.6
1
+
0
0.4
0.2
0
­0.2
­0.4
­5
2
1.8
1- Proporcional et =xt −y t
2- Integral
1.6
1.4
1.2
2
1
0.8
0.6
t
0.4
∫0 et·dt
0.2
0
­5
2
1.6
1.2
3- Diferencial
det
dt
0.8
3
0.4
0
­0.4
­0.8
­1.2
­1.6
­2
­5
Reguladores PID (I)
Regulador P
X(s)
Respuesta ante un
escalón unitario
Representación típica
en circuitos de control
y(t)
Y(s)
K
K
x(t)
y(t)
K
t
Regulador I
y(t)
X(s)
Y(s)
1/(s·Ti)
x(t)
X(s)
y(t)
1
Ti
Regulador D
Ti
t
y(t)
Y(s)
s·Td
t
El comportamiento
ideal del derivador es
imposible de reproducir
físicamente
Reguladores PID (II)
Regulador PI
X(s)
Respuesta ante un
escalón unitario
Representación típica
en circuitos de control
y(t)
Y(s)
K
x(t)
K
K·(1+1/(s·Ti))
-T i
Ti
y(t)
t
Regulador PD (ideal)
X(s)
Y(s)
K·(1+s·Td)
El comportamiento
ideal del PD es
imposible de reproducir
físicamente
y(t)
K
t
Regulador PD (real)
K·Td/TN
X(s)
Y(s)
K·(1+s·Td)/(1+s·TN)
Td>TN
y(t)
K
x(t)
K
TN
t
Td
y(t)
Reguladores PID (III)
Respuesta ante un
escalón unitario
Representación típica
en circuitos de control
Regulador PID(ideal)
X(s)
El comportamiento
ideal del PID es
imposible de reproducir
físicamente
y(t)
Y(s)
K(1+1/(s·Ti)+s·Td)
K
2
K
T d ·T i · s T i ·s1
-T i
Ti· s
t
Ti>Td
Regulador PID (real)
X(s)
Y(s)
K·((1+s·Td)/(1+s·TN)+1/(s·Ti))
K
K·T d/TN
T d ·T i · s 2T iT N ·s1
T i · s·1T N ·s
Ti>Td>TN
y(t)
K
x(t)
K
-Ti
t
Ti Td
y(t)
Implementación de Reguladores Electrónicos
Zr
Ze
x(t)
Y s =
_
+
-y(t)
y(t)
R s =
Zr
Ze
Xs
Y s Zr
=
X s Ze
NOTA: Las ecuaciones suponen un comportamiento ideal de los componentes electrónicos, es
decir, sin saturaciones, respuesta inmediata, parámetros constantes, circuitos operacionales
ideales, resistencias y condensadores puros, etc.
REGULACIÓN AUTOMÁTICA
Regulador P
R2
R1
x(t)
{
_
+
Fase [º]
A(ω )
20·logK
0º
ω [rad/s]
Z e=R1
Y s R2
R s =
= =K
X s R1
R2
K=
R1
y(t)
Ganancia [dB]
Z r =R2
Ψ (ω )
ω [rad/s]
Regulador PI
C
R1
{
R2
Z e =R1
R s =
y(t)
K=
Ganancia [dB]
Fase [º]
A(ω )
-20 dB/dec
1
C ·s
R2
R2
R1
Y s
=
X s R1
T i=R1 · C
T =K ·T i =R2 · C
Im
-1/T
+45º/dec
-90º
ω [rad/s]
=
Ψ (ω )
0º
20·logK
1/T
1
C ·s
R2 1
R1 R1· C · s
K · T i · s1 T · s 1
1
R s =K
=
=
Ti· s Ti·s
Ti·s
_
+
x(t)
Z r =R2
0.1/T
10/T ω [rad/s]
Re
Regulador PD
2·R2
{
2·R2
C
R1
Z e=R1
Y s 4·R2 · 1R2 · C · s
R s =
=
=K · 1T d · s
X s R1
y(t) K =4· R2 T =R ·C
d
2
R1
_
+
x(t)
Z r =4·R2 · 1R2 · C · s
Ganancia [dB]
Fase [º]
A(ω )
+20 dB/dec
-1/Td
20·logK
Re
+45º/dec
0º
1/Td
ω [rad/s]
Im
Ψ (ω )
90º
0.1/Td
10/Td
ω [rad/s]
Regulador PID
R2
R1
C2
{
R3
C3
_
y(t)
Ganancia [dB]
[
Z e=R1
Y s
1
=K · 1
T ·s
X s
T i ·s d
1T 1 · s · 1T 2 ·s
R s =K ·
T i ·s
Fase [º]
90º
+45º/dec
+20 dB/dec
-20 dB/dec
Ψ (ω )
Im
-1/T 2
+90º/dec
-1/T 1
Re
A(ω )
+45º/dec
-90º
1/T1
1
· 1R2 ·C 2 · s · 1R3 ·C 3 · s R3 ·C 2 ·s
C 2 ·s
R s =
+
x(t)
Zr =
1/T2
ω [rad/s]
0.1/T1
0.1/T2
10/T1 10/T2
]
Efectos de los Reguladores PID
• Regulador P: Aumenta la ganancia de la cadena directa del sistema. Reduce los
errores en régimen permanente. Modifica el transitorio y puede tender a desestabilizar
el sistema en muchos casos si K aumenta demasiado.
• Regulador PI: Aumenta la ganancia y el tipo de la cadena directa del sistema,
combinando los efectos de los dos reguladores anteriores. Si el cero se encuentra muy
próximo al origen con respecto a los polos dominantes del sistema, apenas modifica el
transitorio del sistema comparado con un regulador P con la misma ganancia K.
• Regulador PD: Su ganancia, polo y cero permiten modificar la situación final de los
polos dominantes del sistema en bucle cerrado. Permite definir el comportamiento
transitorio del sistema. Por lo general estabiliza el sistema si se utiliza un valor de
ganancia K moderado. Es muy sensible a perturbaciones de alta frecuencia.
• Regulador PID: Es un compendio de los efectos de los reguladores anteriores.
Im
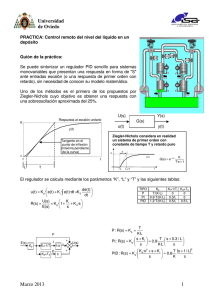
Diseño de un Regulador PI
El regulador PI aumenta el tipo del sistema
al añadir polos sobre el origen de
coordenadas del plano complejo:
sc
R s =
s
d
c<d/10
-c
Re
La constante del PI suele ser 1 para que no modifique el diseño de compensación del
régimen transitorio que se pueda haber realizado previamente.
El cero se coloca muy próximo al origen, tanto como sea posible, aunque se puede
utilizar como criterio válido que su distancia al origen de coordenadas sea, al menos,
inferior a la décima parte de la distancia de los polos dominantes diseñados para M(s)
al eje imaginario. Eso hace que el nuevo par polo-cero que introduce el regulador PI
en el sistema apenas modifique el Lugar de las Raíces del sistema; por lo tanto,
apenas varía la situación de los polos en Bucle Cerrado del sistema y, en
consecuencia, apenas modifica su respuesta transitoria. Este efecto sólo se logra si el
error inicial es pequeño.
Control de las Perturbaciones (I):
• Interesa que la ganancia del sistema en régimen permanente ante las
perturbaciones sea nula y que el transitorio tenga una oscilación y duración
mínimas.
Z(s)
A)
X(s) +
R(s)
+
+
M s =
Y(s)
M s =
G(s)
_
H(s)
Z(s)
B)
X(s) +
R(s)
G1(s)
_
+
+
G2(s)
H(s)
1.2
Si: A) R(s) es de Tipo 0
B) R(s)·G1(s) es
de Tipo 0
Y s R s·G s
=
FdT ante la entrada
X s 1R s·Gs ·Hs
Y s G s
Ns =
=
FdT ante la perturbación
Z s 1Rs ·Gs ·Hs
Y(s)
Y s R s ·G1 s ·G 2 s
=
FdT ante la entrada
X s 1R s ·G 1 s ·G2 s ·H s
Y s G2 s
N s =
=
FdT ante la perturbación
Z s 1R s · G1 s ·G2 s ·H s
1.2
z(t)
1
0.8
Si: A) R(s) es de Tipo 1
B) R(s)·G1(s) es
y(t)
0.6
de Tipo 1
0.4
0.8
0.6
0.2
0
0
0
2
4
6
8
10
y(t)
0.4
0.2
­0.2
­2
z(t)
1
­0.2
­2
0
2
4
6
8
10
Control de las Perturbaciones (II):
• Estabilidad: Es la misma ante la entrada y la perturbación. Los polos son las
raíces de la ecuación característica 1+R(s)·G(s)·H(s).
• Régimen permanente: Si existe un integrador (polo en el origen) entre la
entrada y la perturbación (normalmente en R(s)), su acción integral anula al
menos el ep en régimen permanente y además hace que la ganancia del sistema en
x(t)
régimen permanente ante la perturbación sea nula.
e =0
1.2
1
0.8
Por ejemplo, si: Rs Tipo 1; Gs Tipo 0; h0=lims 0 Hs
1
1 Rs ·Gs
1 Rs ·Gs
1
X s = Y s= ·
y ∞=lims 0 s · ·
=
s
s 1Rs ·Gs ·Hs
s 1Rs ·G s ·Hs h0
1
1 Gs
1 Gs
Z s = Y s = ·
y ∞=lims 0 s· ·
=0
s
s 1R s ·G s·H s
s 1R s·Gs ·H s
p
h0·y(t)
0.6
0.4
0.2
0
­0.2
­2
0
1. 2
2
4
6
8
10
z(t)
1
0. 8
0. 6
y(t)
0. 4
0. 2
0
­0.2
­2
0
2
4
6
8
10
• Régimen transitorio: Las respuestas transitorias de M(s) y N(s) están
relacionadas, comparten el mismo denominador aunque tienen distinto numerador.
Hay que buscar una combinación de ceros y polos para ambas funciones de
transferencia que den un comportamiento aceptable en ambos casos.