6. Sistemas lineales
Anuncio

Grado en Óptica y Optometrı́a 40
Métodos Matemáticos (Curso 2013 – 2014)
6. Sistemas lineales
Método de eliminación de Gauss
La idea básica para resolver un sistema de ecuaciones lineales es obtener, a partir del
sistema dado, un sistema más simple que tenga las mismas soluciones. Existen tres tipos
de operaciones sobre un sistema, llamadas operaciones elementales, que no alteran sus
soluciones, son las siguientes:
Operación 1: multiplicar una cualquiera de las ecuaciones por una constante distinta de
cero
Operación 2: intercambiar dos ecuaciones cualesquiera
Operación 3: sustituir una ecuación por la que resulta de sumarle una cualquiera de las
otras ecuaciones multiplicada por una constante.
Después de aplicar una sucesión finita de estas operaciones elementales al sistema dado, se
puede obtener un sistema más simple a partir del cual la solución se obtiene directamente.
Caso en el que el número de incógnitas es igual al número de ecuaciones
Consideremos el sistema de ecuaciones lineales:
2x2 + 4x3 =
2
x1 + 2x2 + 2x3 =
3
3x1 + 4x2 + 6x3 = −1
Dado que las operaciones elementales mencionadas afectan sólo a los coeficientes de las
ecuaciones, cuyas posiciones en el sistema podemos representar esquemáticamente en
forma de matriz numérica, resulta más cómodo utilizar la siguiente notación matricial:
0 2 4|
2
1 2 2|
3
3 4 6 | −1
Ahora realizaremos sucesivamente las siguientes operaciones elementales
1. Intercambiar la primera y la segunda filas.
2. Sustituir en la matriz resultante la tercera fila por la que resulta de restarle la primera
fila multiplicada por tres.
3. Sustituir en la matriz resultante la tercera fila por la que resulta de sumarle la
segunda fila.
El esquema
0
1
3
siguiente muestra las sucesivas
2 4|
2
1
F
↔
F
1
2
2 2|
3
→ 0
4 6 | −1
3
matrices resultantes.
2 2|
3
F3 → F3 − 3F1
2 4|
2
→
4 6 | −1
Métodos Matemáticos (Curso 2013 – 2014)
Grado en Óptica y Optometrı́a 41
1
2 2|
3
1 2 2|
3
F3 → F3 + F2
0
2 4|
2
2
→ 0 2 4|
0 −2 0 | −10
0 0 4 | −8
El proceso de eliminación llevado a cabo hasta obtener esta matriz se llama eliminación
hacia adelante. El motivo es el siguiente: si se considera el sistema resultante
x1 + 2x2 + 2x3 =
3
2x2 + 4x3 =
2
4x3 = −8
se ve que el proceso ha sido eliminar x1 de la segunda y tercera ecuaciones y eliminar x2
de la tercera ecuación.
El coeficiente 1 de la primera incógnita x1 en la primera ecuación (fila), después de
haber realizado el intercambio de la primera fila por la segunda, es el llamado pivote
en esta primera operación de eliminación. (Nótese que el hecho de intercambiar filas no
constituye una operación de eliminación). Los pivotes de la segunda y la tercera filas son
2 y 4, respectivamente.
Un sistema ası́, se dice que está en forma escalonada. De la misma forma la matriz
correspondiente se dice matriz escalonada. En esto consiste el método de eliminación
gaussiana: la matriz de coeficientes se reduce mediante operaciones entre filas a la forma
escalonada, se resuelve para la última de las incógnitas y luego se utiliza la sustitución
hacia atrás a fin de resolver las demás incógnitas. En el ejemplo anterior, de la tercera
ecuación se obtiene inmediatamente que x3 = −2, lo cual llevado a la segunda ecuación
produce el resultado x2 = 5, y finalmente de la primera x1 = −3.
Aunque el problema ya estarı́a resuelto, podemos dar un paso más. Dividamos la
segunda y la tercera ecuaciones (filas) por sus respectivos pivotes 2 y 4. Obtendrı́amos ası́
la matriz
1 2 2|
3
0 1 2|
1
0 0 1 | −2
Finalmente si realizamos las siguientes
1 2 2|
3
F2 → F2 − 2F3
0 1 2|
1
→
0 0 1 | −2 F1 → F1 − 2F3
operaciones:
1 2 0|
7
1 0 0 | −3
0 1 0|
5 F1 → F1 − 2F2→ 0 1 0 |
5
0 0 1 | −2
0 0 1 | −2
obtenemos una matriz escalonada por filas en forma reducida que se corresponde con el
sistema:
x1
= −3
x2
=
5
x3 = −2
A este proceso para obtener la matriz escalonada en forma reducida a partir de la matriz
escalonada se le llama, como ya se ha mencionado, sustitución hacia atrás, y el proceso
total se conoce como eliminación de Gauss-Jordan.
Sistemas lineales generales
Analizaremos ahora los casos de sistemas rectangulares (distinto número de ecuaciones
que de incógnitas), y sistemas cuadrados con matriz de coeficientes singular (no invertible).
La eliminación gaussiana se adapta fácilmente a estos casos también.
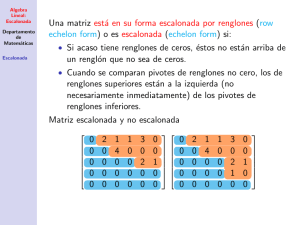
Demos primero la idea de matriz en forma escalonada para sistemas rectangulares. En
general se dice que una matriz está en forma escalonada si
Grado en Óptica y Optometrı́a 42
Métodos Matemáticos (Curso 2013 – 2014)
1. Las filas distintas de cero están por encima de las filas cuyos elementos son todos
nulos, y los pivotes son los primeros elementos distintos de cero en esas filas.
2. Debajo de cada pivote hay una columna de ceros.
3. Cada pivote está a la derecha del pivote de la fila anterior; esto produce la figura
escalonada.
Un ejemplo de matriz escalonada es el siguiente
3
0
0
0
1
-1
0
0
0
−2
0
0
5 −1
8
0
−4
1
0
0
2
1
2
0
Los pivotes aparecen recuadrados. En el caso de que todos los pivotes sean iguales a 1 y
además sean el único elemento distinto de cero en su columna, como por ejemplo la matriz
1
0
0
0
0
1
0
0
0
2
0
0
0
0
1
0
5 −1
7
0
−2
1
0
0
se dice que la matriz está en forma escalonada reducida.
Ejemplo
Ilustraremos con un caso particular el algoritmo general de eliminación gaussiana. Consideremos el sistema lineal
x − y − z + 2t = 1
2x − 2y − z + 3t = 3
−x + y − z = −3
de 3 ecuaciones con 4 incógnitas (donde por comodidad escribimos x1 = x, x2 = y, x3 = z, x4 = t).
La matriz aumentada es
1
2
−1
−1 −1 2 |
−2 −1 3 |
1 −1 0 |
1
3
−3
sustrayendo de la segunda fila dos veces la primera y sumando la tercera la primera se obtiene
1 −1 −1
2|
1
0
0
1 −1 |
1
0
0 −2
2 | −2
y finalmente si se suma a la tercera la segunda multiplicada por 2 se llega a
1 −1 −1
2| 1
0
0 1 −1 | 1
0
0
0
0| 0
donde se han recuadrado los pivotes. Si sumamos la segunda fila a la primera, obtenemos la matriz
del sistema en forma escalonada reducida.
1 −1
0
1| 2
0
0 1 −1 | 1
0
0
0
0| 0
Grado en Óptica y Optometrı́a 43
Métodos Matemáticos (Curso 2013 – 2014)
El sistema resultante es
x−y+t=2
z−t=1
que tiene un número infinito de soluciones.
Para escribir todas estas soluciones (lo que se conoce como solución general del sistema) expresamos las variables básicas (aquellas que corresponden a las columnas con pivote) en función
de las variables libres (todas las demás).
En este caso, las variables básicas son x, z, y las variables libres son y, t. Ası́ pues,
x = 2 + y − t,
z = 1 + t,
y = y,
t = t. Ejemplo
Analicemos finalmente el caso de un sistema cuadrado con infinitas soluciones. Consideremos
por ejemplo el sistema
x − 2y + z = 0
4x − 5y + 4z = 1
2x − y + 2z = 1
La matriz aumentada es en este caso
1
4
2
−2
−5
−1
1| 0
4| 1
2| 1
Restando de la segunda fila la primera multiplicada por 4, y restando de la tercera fila la
primera multiplicada por 2 se obtiene
1 −2 1 | 0
0
3 0| 1
0
3 0| 1
Restando de la tercera la segunda se llega a
1 −2 1 | 0
0
3 0| 1
0
0 0| 0
Lo que indica que una de las ecuaciones del sistema es superflua. Si dividimos la segunda por 3
tenemos
1 −2 1 | 0
0
1 0 | 31
y finalmente sumando a la primera dos veces la seegunda
1 0 1 | 23
0 1 0 | 13
ya tenemos la matriz en forma escalonada reducida. Las variables básicas son en este caso x, y, y
la variable libre es z, de manera que podemos escribir la solución general del sistema dado en la
forma
x=
2
3
− z,
y = 31 ,
z = z. Métodos Matemáticos (Curso 2013 – 2014)
Grado en Óptica y Optometrı́a 44
Aritmética matricial básica
Una matriz A de tamaño m × n es un cuadro de números formado por m filas y n
columnas.
a11 a12 · · · a1n
a21 a22 · · · a2n
A= .
..
..
..
..
.
.
.
am1 am2 · · · amn
Un matriz es cuadrada cuando m = n (se dice que n es el orden de la matriz). El
elemento de A que figura en la fila i-ésima y en la columna j-ésima se denota por aij . Dos
matrices son iguales, A = B, si y sólo si tienen el mismo tamaño, y todos sus elementos
son iguales, aij = bij .
Las tres operaciones básicas de la aritmética matricial son la suma de matrices, la
multiplicación por un escalar, y la multiplicación de matrices.
• Dos matrices A y B se pueden sumar si son del mismo tamaño, y la matriz suma
C = A + B es otra matriz del mismo tamaño y tal que cij = aij + bij . Por ejemplo,
3 −1 5
2 −3 1
1 2 4
=
+
2
2 9
−5
1 6
7 1 3
• Si c es un escalar y A es una matriz m × n, entonces B = cA es una matriz m × n
cuyos elementos son de la forma bij = c aij . Por ejemplo,
3 6
1 2
=
3
−3 0
−1 0
• Dos matrices A y B se pueden multiplicar sólo si el número de columnas de A es igual
al número de filas de B. Si A es de tamaño l × m y B es de tamaño m × n, entonces C
es de tamaño l × n, y el elemento cij de C es el producto de la i-ésima fila de A por la
j-ésima columna de B en la forma que se indica a continuación
∗
∗
∗
∗
∗
∗
a31 a32 a33
∗
∗
∗
∗
∗
a34
∗
b12
∗ ∗
b22
= ∗ ∗ ,
b32
∗ c32
b42
c32 = a31 b12 +a32 b22 +a33 b32 +a34 b42 .
Por ejemplo
2 3
4 0
1
2 0
5 −1 0
=
2 · 1 + 3 · 5 2 · 2 + 3 · (−1) 2 · 0 + 3 · 0
4 · 1 + 0 · 5 4 · 2 + 0 · (−1) 4 · 0 + 0 · 0
=
17 1 0
4 8 0
Observación
La suma de matrices es conmutativa, A + B = B + A, y asociativa, (A + B) + C = A + (B + C).
El producto de matrices es asociativo, A(BC) = (AB)C, pero no es, en general, conmutativo,
AB 6= BA. Además el producto es distributivo respecto de la suma
A(B + C) = AB + BC
(A + B)C = AC + BC. Grado en Óptica y Optometrı́a 45
Métodos Matemáticos (Curso 2013 – 2014)
Dada una matriz A se llama matriz
obtiene cambiando filas por columnas.
a11 a12 · · · a1n
a21 a22 · · · a2n
..
..
..
..
.
.
.
.
traspuesta de A y se designa por At la que se
t
=
am1 am2 · · · amn
a11
a12
..
.
a21
a22
..
.
a1n a2n
· · · am1
· · · am2
..
..
.
.
· · · amn
Por ejemplo
3 1 2
5 7 3
t
3 5
= 1 7
2 3
Son inmediatas las siguientes propiedades:
1. (A + B)t = At + B t
2. (At )t = A
3. (cA)t = cAt
4. (AB)t = B t At
Las matrices cuadradas (es decir, las que tienen el mismo número de filas que de
columnas), presentan algunas particularidades respecto de las demás. Por ejemplo es
posible asociarles un número llamado determinante.
Dada la matriz de tamaño 2 × 2
a11 a12
A=
a21 a22
se define el determinante de A como
a
a
det A ≡ 11 12
a21 a22
= a11 a22 − a12 a21
En el caso de una matriz de tamaño 3 × 3
a11 a12 a13
A = a21 a22 a23
a31 a32 a33
se define
a
a
det A = a11 22 23
a32 a33
− a12 a21 a23
a31 a33
+ a13 a21 a22
a31 a32
= a11 (a22 a33 − a23 a32 ) − a12 (a21 a33 − a23 a31 ) + a13 (a21 a32 − a22 a31 ).
Ejemplo
3 5
4 2
−1 2
2
3
4
= 3 2
2
4 3 3 + 2 4
−
5
−1
4
−1 4
2 = 3 · 2 − 5 · 19 + 2 · 10 = −69. 2 Es inmediato comprobar las siguientes propiedades de los determinantes:
Métodos Matemáticos (Curso 2013 – 2014)
Grado en Óptica y Optometrı́a 46
1. Si un determinante tiene una lı́nea (fila o columna) formada por ceros, entonces el
determinante es cero.
2. Si se cambian filas por columnas el valor del determinante no varı́a.
3. Si se cambian entre sı́ dos lı́neas del mismo tipo (filas o columnas), el valor absoluto
del determinante no varı́a, pero cambia el signo.
4. Un determinante que tiene dos lineas paralelas iguales es nulo.
5. Si se multiplican todos los elementos de una lı́nea por un número c el valor del
determinante queda multiplicado por c.
6. Si un determinante tiene los elementos de una lı́nea múltiplos de una paralela es
nulo.
7. Si se suma a una lı́nea un múltiplo de una lı́nea paralela el valor del determinante
no varı́a.
Matriz inversa
Si una matriz cuadrada A tiene determinante no nulo (det A 6= 0) entonces existe una
matriz A−1 (inversa de A) cumpliendo
AA−1 = A−1 A = I
donde I es la matriz identidad del mismo orden n
1 0 ···
0 1 ···
I = In = . . .
.. .. . .
que la matriz A.
0
0
..
.
0 0 ··· 1
Una matriz elemental es una matriz que se obtiene de la matriz identidad por una sola
operación elemental entre filas.
Ejemplo
Las siguientes son matrices elementales de orden 3
0 1 0
1 0
0
0 ,
E1 = 1 0 0 , E2 = 0 1
0 0 1
0 0 −7
|
{z
}
|
{z
}
F1 ↔ F2
F3 → −7F3
1 0
E3 = −3 1
0 0
|
{z
0
0 .
1
}
F2 → −3F1 + F2 . Si E es una matriz elemental de orden m obtenida ejecutando una cierta operación
elemental entre filas sobre la matriz identidad Im , entonces para cualquier matriz A de
tamaño m × n el producto EA da como resultado la matriz que se obtendrı́a al realizar
sobre A la misma operación que se efectuó sobre E.
Ejemplo
Si aplicamos la matriz E3 del ejemplo anterior al vector b = (b1 , b2 , b3 ) produce el siguiente
efecto:
1 0 0
b1
b1
Eb = −3 1 0 b2 = −3b1 + b2 .
0 0 1
b3
b3
Métodos Matemáticos (Curso 2013 – 2014)
Grado en Óptica y Optometrı́a 47
realizando sobre la matriz columna la misma operación que dio lugar a la matriz elemental. Vamos a utilizar estos resultados para hallar la inversa de una matriz cuadrada. Sea A
una matriz que admite inversa y sean E1 , E2 , . . . , En las matrices que realizan las operaciones elementales necesarias para reducirla a la matriz identidad I. Entonces, si realizamos
estas mismas operaciones sobre la matriz identidad I obtenemos precisamente A−1 .
En efecto si En · · · E2 E1 A = I, entonces (En · · · E2 E1 )A = I, es decir En · · · E2 E1 = A−1 y
multiplicando por la matriz identidad en los dos miembros de la igualdad En · · · E2 E1 I =
A−1 .
Ejemplo
Obtener la matriz inversa de
1
A= 2
4
0 2
−1 3
1 8
Utilizaremos el resultado anterior. Ası́ pues realizaremos las mismas operaciones elementales con
la matriz A y con la matriz identidad I. Colocamos una matriz al lado de la otra como se muestra
a continuación:
1
0 2 1 0 0
1
0
2 1 0 0
F2 → F2 − 2F1
F3 → F3 + F2
→
[A|I] = 2 −1 3 0 1 0
→ 0 −1 −1 −2 1 0
F
→
F
−
4F
3
3
1
4
1 8 0 0 1
0
1
0 −4 0 1
1
0
0
1
0
2 −1 −1 −2
0 −1 −6
0
1
1
0
1
F
→
F
+
2F
1
1
3
0
→ 0
F2 → F2 − F3
1
0
1
0
0
0
1
0
0
0
1
0
0
−1
0
0 −1
−11 2
2
F2 → −F2
4 0 −1
→
−6 1
1 F3 → −F3
−11
2
2
−4
0
1 = [I|A−1 ]
6 −1 −1
Ası́ pues,
A−1
−11
= −4
6
2
2
0
1 . −1 −1
Observación
Si A es una matriz invertible, el sistema Ax = b tiene una única solución x = A−1 b. Ejercicios
1 Resolver por eliminación gaussiana los siguientes sistemas lineales
x+y−z =
3
3x − y + 2z = −3
2x − y + 3z =
0
x + y + z = −4
−x − 2y + z = −5
2x + y − z = −3
2 Calcular la matriz elemental E tal
1
A= 3
5
que EA = B:
2
1
2
4 , B = 0 −2 ,
6
5
6
Grado en Óptica y Optometrı́a 48
Métodos Matemáticos (Curso 2013 – 2014)
1
2
5 2
3 4 ,
A = 0 −1
5
0 −2 7
1
2
5
2
3
4
B = 0 −1
0 −10 −27 −3
3 Estudiar y, en los casos en que sea posible, calcular la solución general de los sistemas
lineales Ax = b cuando A y b son
1
5
2
1
0 −1
3
1
2
5
2 2
1
2
1
3 4 , b = −3 ; A =
0
7
A = 0 −1
5
, b = −1 .
5
0 −1 −2 7
2
1
2 −1
−2
−1
2
1
1
4 En los ejercicios siguientes realizar los cálculos matriciales que se indican
5
−2 1
2 3 1 5
2 0 4
1
0 3
2
,
+
3 0 4 ,
0 6 2 4 1
−2 5 8
2 −1 6
2 3
0
5 Determinar cuáles de las siguientes matrices admiten inversa
3
5 2
1 1 1
1 2
2 1
2 3 , 0 2 3
, 4
,
3 6
3 2
2 −6 2
5 5 1
6 Hallar las inversas de las siguientes matrices
−4 −5
5
6
1
2 6 6
1
, 2 7 6 ,
1
2 7 7
1
0
2
2
2
0
0
4
4
0
0
.
0
8
7
0
0
5
1
3
0
6